Table of Contents
- Preface
- Introduction
- I. Automata
- 1. Automata and Formal Languages
- 1.1 Languages and grammars
- 1.2 Finite automata and regular languages
- 1.2.1 Transforming nondeterministic finite automata
- 1.2.2 Equivalence of deterministic finite automata
- 1.2.3 Equivalence of finite automata and regular languages.
- 1.2.4 Finite automata with special moves
- 1.2.5 Minimization of finite automata
- 1.2.6 Pumping lemma for regular languages
- 1.2.7 Regular expressions
- 1.3 Pushdown automata and context-free languages
- 2. Compilers
- 3. Compression and Decompression
- 4. Reliable Computation
- II. COMPUTER ALGEBRA
- 5. Algebra
- 6. Computer Algebra
- 7. Cryptology
- 8. Complexity Theory
- III. NUMERICAL METHODS
- 9. Competitive Analysis
- 10. Game Theory
- 10.1 Finite games
- 10.2 Continuous games
- 10.2.1 Fixed-point methods based on best responses
- 10.2.2 Applying Fan's inequality
- 10.2.3 Solving the Kuhn-Tucker conditions
- 10.2.4 Reduction to optimization problems
- 10.2.5 Method of fictitious play
- 10.2.6 Symmetric matrix games
- 10.2.7 Linear programming and matrix games
- 10.2.8 The method of von Neumann
- 10.2.9 Diagonally strictly concave games
- 10.3 The oligopoly problem
- 11. Recurrences
- 12. Scientific Computing
- Bibliography
 parser
parser parsing
parsing 
 -server problem
-server problem List of Figures
- 1.1. Finite automaton.
- 1.2. The finite automaton of Example 1.9.
- 1.3. Nondeterministic finite automata.
- 1.4. Transition tables of the NFA in Fig. 1.3
- 1.5. The equivalent DFA with NFA
 in Fig. 1.3.
in Fig. 1.3. - 1.6. Equivalent DFA's (Example 1.11).
- 1.7. Non equivalent DFA's (Example 1.12).
- 1.8. DFA of the Example 1.13.
- 1.9. NFA associated to grammar in Example 1.14.
- 1.10. Relations between regular grammars and finite automata. To any regular grammar one may construct an NFA which accepts the language generated by that grammar. Any NFA can be transformed in an equivalent DFA. To any DFA one may construct a regular grammar which generates the language accepted by that DFA.
- 1.11. Finite automata with
 -moves.
-moves. - 1.12. NFA equivalent to FA with
 -moves given in Fig. 1.11.
-moves given in Fig. 1.11. - 1.13. (a) Representation of an NFA. Initial states are represented by a circle with an arrow, final states by a double circle. (b) Union of two NFA's.
- 1.14. (a) Product of two FA. (b) Iteration of an FA.
- 1.15. Minimization of DFA.
- 1.16. Minimum automaton equivalent with DFA in Fig. 1.15.
- 1.17. Sketch of DFA used in the proof of the pumping lemma.
- 1.18. Properties of regular expressions.
- 1.19. DFA from Example 1.20, to which regular expression is associated by Method 1.
- 1.20. DFA in Example 1.21 to which a regular expression is associated by Method 1. The computation are in Figure 1.21.
- 1.21. Determining a regular expression associated to DFA in Figure 1.20 using sets
 .
. - 1.22. Possible equivalent transformations for finding regular expression associated to an automaton.
- 1.23. Transformation of the finite automaton in Fig. 1.19.
- 1.24. Steps of Example 1.23.
- 1.25. Possible transformations to obtain finite automaton associated to a regular expression.
- 1.26. Associating finite automaton to regular expression
 .
. - 1.27. Finite automaton associated to regular expression
 .
. - 1.28. DFA's to minimize for Exercise 1.2-5
- 1.29. Finite automata for Exercises 1.2-6 and 1.2-7.
- 1.30. DFA for Exercise1.2-9.
- 1.31. Pushdown automaton.
- 1.32. Example of pushdown automaton.
- 1.33. Transition graph of the Example 1.27
- 1.34. Computation tree to show acceptance of the word
 (see Example 1.27).
(see Example 1.27). - 1.35. Computation tree to show that the pushdown automaton in Example 1.27 does not accept word
 .
. - 1.36. Recognising a word by empty stack (see Example 1.28).
- 1.37. Derivation (or syntax) tree of word
 .
. - 1.38. Decomposition of tree in the proof of pumping lemma.
- 2.1. The translator.
- 2.2. The structure of compilers.
- 2.3. The programs of the analysis and the synthesis.
- 2.4. The positive integer and real number.
- 2.5. The identifier.
- 2.6. A comment.
- 2.7. The character string.
- 2.8.
 grammar.
grammar. - 2.9. The sentential form and the analysed text.
- 2.10. The structure of the
 parser.
parser. - 2.11. The syntax tree of the sentence
 .
. - 2.12. The
 grammar.
grammar. - 2.13. The
![The \left[A\rightarrow\alpha.\beta,a\right] LR(1) -item.](VOLUME1_KONV-Firefox_elemei/eq2_anon1656.png)
![The \left[A\rightarrow\alpha.\beta,a\right] LR(1) -item.](VOLUME1_KONV-Firefox_elemei/eq2_anon1657.png) -item.
-item. - 2.14. The function
![The function closure(\left[A\rightarrow\alpha.B\beta,a\right]) .](VOLUME1_KONV-Firefox_elemei/eq2_anon1702.png) .
. - 2.15. The automaton of the Example 2.15.
- 2.16. The structure of the
 parser.
parser. - 2.17. The syntax tree of the sentence
 .
. - 2.18. The automaton of the Example 2.22.
- 3.1. Frequency of letters in
 characters of English.
characters of English. - 3.2. Example of a code tree.
- 3.3. Example of Shannon code and Shannon-Fano-Elias-code.
- 3.4. Example of the Shannon-Fano-algorithm.
- 3.5. Example of a Huffman code.
- 3.6. Example of arithmetic encoding with interval expansion.
- 3.7. Table of the first values for the Krichevsky-Trofimov-estimator.
- 3.8. An example for a tree source.
- 3.9. Weighted context tree for source sequence '
 ' with past
' with past  . The pair
. The pair  denotes
denotes  zeros and
zeros and  ones preceded by the corresponding context
ones preceded by the corresponding context  . For the contexts
. For the contexts  it is
it is  .
. - 4.1. AND, OR and NOT gate.
- 4.2. The assignment (values on nodes, configuration) gets propagated through all the gates. This is the “computation”.
- 4.3. Naive parallel addition.
- 4.4. Failure at a gate.
- 4.5. An executive organ.
- 4.6. A restoring organ.
- 4.7. An executive organ followed by a restoring organ.
- 4.8. Reliable circuit from a fault-free circuit.
- 4.9. A shift register.
- 4.10. Part of a circuit which computes the sum of two binary numbers
 . We feed the digits of
. We feed the digits of  and
and  beginning with the lowest-order ones, at the input nodes. The digits of
the sum come out on the output edge. A shift register holds the carry.
beginning with the lowest-order ones, at the input nodes. The digits of
the sum come out on the output edge. A shift register holds the carry. - 4.11. A “computer” consists of some memory (shift registers) and a Boolean circuit operating on it. We can define the size of computation as the size of the computer times the number of steps.
- 4.12. Transmission through a noisy channel.
- 4.13. Using a refresher.
- 4.14. A regular expander.
- 6.1. The general scheme of modular computations.
- 6.2. Illustration of the operation of the
Classical-Euclideanalgorithm in![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1172.png) and
and ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1173.png) . In case (a), the input is
. In case (a), the input is ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1174.png) . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines
. The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1175.png) and
and ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1176.png) is executed four times, values
is executed four times, values ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1177.png) ,
, ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1178.png) and
and ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1179.png) in these iterations are shown in the table. The
in these iterations are shown in the table. The Classical-Euclidean(![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1180.png)
,![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1181.png)
)algorithm outputs![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1182.png) as result. In case (b), the input parameters are
as result. In case (b), the input parameters are ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1183.png) . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial
. The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial ![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/eq6_anon1184.png) .
. - 6.3. The illustration of the operation of the
Primitive-Euclideanalgorithm with input![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1329.png) . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines
. The first two lines of the program compute the primitive parts of the polynomials. The loop between lines ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1330.png) and
and ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1331.png) is executed three times, the table shows the values of
is executed three times, the table shows the values of ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1332.png) ,
, ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1333.png) and
and ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1334.png) in the iterations. In line
in the iterations. In line ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1335.png) , variable
, variable ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1336.png) equals
equals ![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1337.png) . The
. The Primitive-Euclidean(![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1338.png)
)algorithm returns![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/eq6_anon1339.png) as result.
as result. - 7.1. A typical scenario in cryptography.
- 7.2. Example of an encryption by the shift cipher.
- 7.3. Vigenére square: Plaintext “H” is encrypted as “A” by key “T”.
- 7.4. Example of an encryption by the Vigenére cipher.
- 7.5. Three graphs:
 is isomorphic to
is isomorphic to  , but not to
, but not to  .
. - 7.6. Two ciphertexts encrypting the same plaintext, see Exercise 7.1-1.
- 7.7. The Diffie-Hellman secret-key agreement protocol.
- 7.8. The RSA protocol.
- 7.9. Example of an RSA encryption (M = Message).
- 7.10. Digital RSA signatures.
- 7.11. The Rivest-Sherman protocol for secret-key agreement, based on

- 7.12. Goldreich, Micali, and Wigderson's zero-knowledge protocol for
 .
. - 7.13. Simulation of the zero-knowledge protocol for
 without knowing
without knowing  .
. - 8.1. A Turing machine with one input and two work tapes.
- 8.2. Transition function
 of
of  for
for  .
. - 8.3.
 's states, their meaning and their intention.
's states, their meaning and their intention. - 8.4. Comparison of some polynomial and exponential time functions.
- 8.5. What happens when the computers get faster?
- 8.6. Transition graph of a stochastic automaton for describing
Random-SAT. - 8.7. Runtimes of some algorithms for the satisfiability problem.
- 10.1. Prisoner's dilemma.
- 10.2. Game with no equilibrium.
- 10.3. Finite tree of Example 10.3.
- 10.4. Tree for Exercise 10.1-5.
- 10.5. The graph of function
 .
. - 11.1. The form of particular solutions.
- 11.2. Binary trees with two and three vertices.
- 12.1. Forward and backward error.
- 12.2. Gaussian elimination.
|
AnTonCom, Budapest, 2011 This electronic book was prepared in the framework of project Eastern Hungarian Informatics Books Repository no. TÁMOP-4.1.2-08/1/A-2009-0046 This electronic book appeared with the support of European Union and with the co-financing of European Social Fund
Editor: Antal Iványi Authors of Volume 1: László Lovász (Preface), Antal Iványi (Introduction), Zoltán Kása (Chapter 1), Zoltán Csörnyei (Chapter 2), Ulrich Tamm (Chapter 3), Péter Gács (Chapter 4), Gábor Ivanyos and Lajos Rónyai (Chapter 5), Antal Járai and Attila Kovács (Chapter 6), Jörg Rothe (Chapters 7 and 8), Csanád Imreh (Chapter 9), Ferenc Szidarovszky (Chapter 10), Zoltán Kása (Chapter 11), Aurél Galántai and András Jeney (Chapter 12) Validators of Volume 1: Zoltán Fülöp (Chapter 1), Pál Dömösi (Chapter 2), Sándor Fridli (Chapter 3), Anna Gál (Chapter 4), Attila Pethő (Chapter 5), Lajos Rónyai (Chapter 6), János Gonda (Chapter 7), Gábor Ivanyos (Chapter 8), Béla Vizvári (Chapter 9), János Mayer (Chapter 10), András Recski (Chapter 11), Tamás Szántai (Chapter 12), Anna Iványi (Bibliography) Authors of Volume 2: Burkhard Englert, Dariusz Kowalski, Gregorz Malewicz, and Alexander Shvartsman (Chapter 13), Tibor Gyires (Chapter 14), Claudia Fohry and Antal Iványi (Chapter 15), Eberhard Zehendner (Chapter 16), Ádám Balogh and Antal Iványi (Chapter 17), János Demetrovics and Attila Sali (Chapters 18 and 19), Attila Kiss (Chapter 20), István Miklós (Chapter 21), László Szirmay-Kalos (Chapter 22), Ingo Althöfer and Stefan Schwarz (Chapter 23) Validators of Volume 2: István Majzik (Chapter 13), János Sztrik (Chapter 14), Dezső Sima (Chapters 15 and 16), László Varga (Chapter 17), Attila Kiss (Chapters 18 and 19), András Benczúr (Chapter 20), István Katsányi (Chapter 21), János Vida (Chapter 22), Tamás Szántai (Chapter 23), Anna Iványi (Bibliography) ©2011 AnTonCom Infokommunikációs Kft. Homepage: http://www.antoncom.hu/ |
It is a special pleasure for me to recommend to the Readers the book Algorithms of Computer Science, edited with great care by Antal Iványi. Computer algorithms form a very important and fast developing branch of computer science. Design and analysis of large computer networks, large scale scientific computations and simulations, economic planning, data protection and cryptography and many other applications require effective, carefully planned and precisely analyzed algorithms.
Many years ago we wrote a small book with Péter Gács [168] under the title Algorithms. The three volumes of the book Algorithms of Computer Science show how this topic developed into a complex area that branches off into many exciting directions. It gives a special pleasure to me that so many excellent representatives of Hungarian computer science have cooperated to create this book. It is obvious to me that this book will be one of the most important reference books for students, researchers and computer users for a long time.
Budapest, July 2010
László Lovász
The first volume of the book Informatikai algoritmusok appeared in 2004 in Hungarian [127], and the second volume of the book appeared in 2005 [128]. Two volumes contained 31 chapters: 23 chapters of the first and second volumes of the present electronic book, and further chapters on clustering, frequent elements in data bases, geoinformatics, inner-point methods, number theory, Petri-nets, queuing theory, and scheduling.
The Hungarian version of the first volume contains those chapters which were finished until May of 2004, and the second volume contains the chapters finished until April of 2005.
The printed English version contains the chapters submitted until April of 2007. Volume 1 [129] contains the chapters belonging to the fundamentals of informatics, while the second volume [130] contains the chapters having closer connection with some applications.
The first and second volumes of the given book represent an extended and corrected electronic version of the printed book written is English. The third volume of the present book contains new chapters.
The chapters of the first volume are divided into three parts. The chapters of Part 1 are connected with automata: Automata and Formal Languages (written by Zoltán Kása, Sapientia Hungarian University of Transylvania), Compilers (Zoltán Csörnyei, Eötvös Loránd University), Compression and Decompression (Ulrich Tamm, Chemnitz University of Technology Commitment), Reliable Computations (Péter Gács, Boston University).
The chapters of Part 2 have algebraic character: here are the chapters Algebra (written by Gábor Ivanyos and Lajos Rónyai, Budapest University of Technology and Economics), Computer Algebra (Antal Járai and Attila Kovács, Eötvös Loránd University), further Cryptology and Complexity Theory (Jörg Rothe, Heinrich Heine University).
The chapters of the third part have numeric character: Competitive Analysis (Csanád Imreh, University of Szeged), Game Theory (Ferenc Szidarovszky, The University of Arizona) and Scientific Computations (Aurél Galántai, Óbuda University and András Jeney, University of Miskolc).
The second volume is also divided into three parts. The chapters of Part 4 are connected with computer networks: Distributed Algorithms (Burkhard Englert, California State University; Dariusz Kowalski, University of Liverpool; Grzegorz Malewicz, University of Alabama; Alexander Allister Shvartsman, University of Connecticut), Parallel Algorithms (Claudia Fohry, University of Kassel and Antal Iványi, Eötvös Loránd University), Network Simulation (Tibor Gyires, Illinois State University) and Systolic Systems (Eberhard Zehendner, Friedrich Schiller University).
The chapters of Part 5 are Relational Databases and Query in Relational Databases (János Demetrovics, Eötvös Loránd University and Attila Sali, Alfréd Rényi Institute of Mathematics), Semistructured Data Bases (Attila Kiss, Eötvös Loránd University) and Memory Management (Ádám Balog, Antal Iványi, Eötvös Loránd University).
The chapters of the third part of the second volume have close connections with biology: Bioinformatics (István Miklós, Rényi Institute of Mathematics), Human-Computer Interactions (Ingo Althöfer, Stefan Schwarz, Friedrich Schiller University), and Computer Graphics (László Szirmay-Kalos, Budapest University of Technology and Economics).
The chapters are validated by Gábor Ivanyos, István Majzik, Lajos Rónyai, András Recski, and Tamás Szántai (Budapest University of Technology and Economics), András Benczúr, Sándor Fridli, János Gonda, István Katsányi, Attila Kiss, László Varga, János Vida, and Béla Vizvári (Eötvös Loránd University), Dezső Sima (Óbuda University) Pál Dömösi, János Sztrik, and Attila Pethő (University of Debrecen), Zoltán Fülöp (University of Szeged), Anna Gál (University of Texas), János Mayer (University of Zürich).
The first and second volumes contain verbal description, pseudocode and analysis of over 200 algorithms, and over 350 figures and 120 examples illustrating how the algorithms work. Each section ends with exercises and each chapter ends with problems. In the two volumes you can find over 330 exercises and 70 problems.
We have supplied an extensive bibliography, in the section Chapter Notes of each chapter. In the bibliography the names of the authors, journals and publishers are usually active links to the corresponding web sites (the living elements are underlined in the printed version and on the screen too).
The LaTeX style file was written by Viktor Belényesi, Zoltán Csörnyei, László Domoszlai and Antal Iványi. The figures was drawn or corrected by Kornél Locher. Anna Iványi transformed the bibliography into hypertext. The DOCBOOK version was made by Marton 2001 Kft.
Using the data of the colofon page you can contact with any of the creators of the book. We welcome ideas for new exercises and problems, and also critical remarks or bug reports.
The publication of the printed book was supported by Department of Mathematics of Hungarian Academy of Science, and the electronic version received support from European Union and from the European Social Fund.
Budapest, May 26, 2011
Antal Iványi (tony@compalg.inf.elte.hu)
Table of Contents
- 1. Automata and Formal Languages
- 1.1 Languages and grammars
- 1.2 Finite automata and regular languages
- 1.2.1 Transforming nondeterministic finite automata
- 1.2.2 Equivalence of deterministic finite automata
- 1.2.3 Equivalence of finite automata and regular languages.
- 1.2.4 Finite automata with special moves
- 1.2.5 Minimization of finite automata
- 1.2.6 Pumping lemma for regular languages
- 1.2.7 Regular expressions
- 1.3 Pushdown automata and context-free languages
- 2. Compilers
- 3. Compression and Decompression
- 4. Reliable Computation
Table of Contents
- 1.1 Languages and grammars
- 1.2 Finite automata and regular languages
- 1.2.1 Transforming nondeterministic finite automata
- 1.2.2 Equivalence of deterministic finite automata
- 1.2.3 Equivalence of finite automata and regular languages.
- 1.2.4 Finite automata with special moves
- 1.2.5 Minimization of finite automata
- 1.2.6 Pumping lemma for regular languages
- 1.2.7 Regular expressions
- 1.3 Pushdown automata and context-free languages
Automata and formal languages play an important role in projecting and realizing compilers. In the first section grammars and formal languages are defined. The different grammars and languages are discussed based on Chomsky hierarchy. In the second section we deal in detail with the finite automata and the languages accepted by them, while in the third section the pushdown automata and the corresponding accepted languages are discussed. Finally, references from a rich bibliography are given.
A finite and nonempty set of symbols is called an alphabet. The elements of an alphabet are letters, but sometimes are named also symbols.
With the letters of an alphabet words are composed. If  then
then  is a word over the alphabet
is a word over the alphabet  (the letters
(the letters  are not necessary distinct). The number of letters of a word, with their multiplicities, constitutes the length of the word. If
are not necessary distinct). The number of letters of a word, with their multiplicities, constitutes the length of the word. If  then the length of
then the length of  is
is  If
If  then the word is an empty word, which will be denoted by
then the word is an empty word, which will be denoted by  (sometimes
(sometimes  in other books). The set of words over the alphabet
in other books). The set of words over the alphabet  will be denoted by
will be denoted by  :
:

For the set of nonempty words over  the notation
the notation  will be used. The set of words of length
will be used. The set of words of length  over
over  will be denoted by
will be denoted by  , and
, and  Then
Then

The words  and
and  are equal (i.e.
are equal (i.e.  ), if
), if  and
and 
We define in  the binary operation called concatenation. The concatenation (or product) of the words
the binary operation called concatenation. The concatenation (or product) of the words  and
and  is the word
is the word  . It is clear that
. It is clear that  This operation is associative but not commutative. Its neutral element is
This operation is associative but not commutative. Its neutral element is  because
because  for all
for all  .
.  with the concatenation is a monoid.
with the concatenation is a monoid.
We introduce the power operation. If  then
then  and
and  for
for  The reversal (or mirror image) of the word
The reversal (or mirror image) of the word  is
is  . The reversal of
. The reversal of  sometimes is denoted by
sometimes is denoted by  or
or  . It is clear that
. It is clear that  and
and 
Word  is a prefix of the word
is a prefix of the word  if there exists a word
if there exists a word  such that
such that  . If
. If  then
then  is a proper prefix of
is a proper prefix of  . Similarly
. Similarly  is a suffix of
is a suffix of  if there exists a word
if there exists a word  such that
such that  . The proper suffix can also be defined. Word
. The proper suffix can also be defined. Word  is a subword of the word
is a subword of the word  if there are words
if there are words  and
and  such that
such that  If
If  then
then  is a proper subword.
is a proper subword.
A subset  of
of  is called a language over the alphabet
is called a language over the alphabet  . Sometimes this is called a formal language because the words are here considered without any meanings. Note that
. Sometimes this is called a formal language because the words are here considered without any meanings. Note that  is the empty language while
is the empty language while  is a language which contains the empty word.
is a language which contains the empty word.
If 

 are languages over
are languages over  we define the following operations
we define the following operations
 union
union

 intersection
intersection

 difference
difference

 complement
complement

 multiplication
multiplication

 power
power
 if
if 
 iteration or star operation
iteration or star operation

 mirror
mirror

We will use also the notation 

The union, product and iteration are called regular operations.
Languages can be specified in several ways. For example a language can be specified using
1) the enumeration of its words,
2) a property, such that all words of the language have this property but other word have not,
3) a grammar.
For example the following are languages


Even if we cannot enumerate the elements of an infinite set infinite languages can be specified by enumeration if after enumerating the first some elements we can continue the enumeration using a rule. The following is such a language

The following sets are languages



where  denotes the number of letters
denotes the number of letters  in word
in word  and
and  the number of letters
the number of letters  .
.
Define the generative grammar or shortly the grammar.
Definition 1.1 A grammar is an ordered quadruple  , where
, where

 is the alphabet of variables (or nonterminal symbols),
is the alphabet of variables (or nonterminal symbols),

 is the alphabet of terminal symbols, where
is the alphabet of terminal symbols, where  ,
,

 is a finite set, that is
is a finite set, that is  is the finite set of productions of the form
is the finite set of productions of the form  , where
, where  and
and  contains at least a nonterminal symbol,
contains at least a nonterminal symbol,

 is the start symbol.
is the start symbol.
Remarks. Instead of the notation  sometimes
sometimes  is used.
is used.
In the production  or
or  word
word  is called the left-hand side of the production while
is called the left-hand side of the production while  the right-hand side. If for a grammar there are more than one production with the same left-hand side, then these production
the right-hand side. If for a grammar there are more than one production with the same left-hand side, then these production

We define on the set  the relation called direct derivation
the relation called direct derivation

In fact we replace in  an appearance of the subword
an appearance of the subword  by
by  and we get
and we get  . Another notations for the same relation can be
. Another notations for the same relation can be  or
or  .
.
If we want to emphasize the used grammar  , then the notation
, then the notation  can be replaced by
can be replaced by  . Relation
. Relation  is the reflexive and transitive closure of
is the reflexive and transitive closure of  , while
, while  denotes its transitive closure. Relation
denotes its transitive closure. Relation  is called a derivation.
is called a derivation.
From the definition of a reflexive and transitive relation we can deduce the following:  , if there exist the words
, if there exist the words  and
and 


 . This can be written shortly
. This can be written shortly  If
If  then
then  . The same way we can define the relation
. The same way we can define the relation  except that
except that  always, so at least one direct derivation will de used.
always, so at least one direct derivation will de used.
Definition 1.2 The language generated by grammar  is the set
is the set

So  contains all words over the alphabet
contains all words over the alphabet  which can be derived from the start symbol
which can be derived from the start symbol  using the productions from
using the productions from  .
.
 where
where 


It is easy to see than  because
because

where up to the last but one replacement the first production ( ) was used, while at the last replacement the production
) was used, while at the last replacement the production  . This derivation can be written
. This derivation can be written  Therefore
Therefore  can be derived from
can be derived from  for all
for all  and no other words can be derived from
and no other words can be derived from  .
.
Definition 1.3 Two grammars  and
and  are equivalent, and this is denoted by
are equivalent, and this is denoted by  if
if  .
.
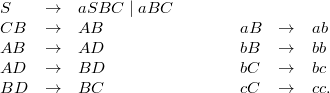
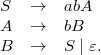
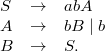
Example 1.2 The following two grammars are equivalent because both of them generate the language  .
.
 , where
, where
 ,
, 

 where
where


First let us prove by mathematical induction that for 
 If
If  then
then

The inductive hypothesis is  We use production
We use production  , then
, then  times production
times production  , and then production
, and then production  , afterwards again
, afterwards again  times production
times production  . Therefore
. Therefore


If now we use production  we get
we get  for
for  , but
, but  by the production
by the production  , so
, so  for any
for any  . We have to prove in addition that using the productions of the grammar we cannot derive only words of the form
. We have to prove in addition that using the productions of the grammar we cannot derive only words of the form  .
It is easy to see that a successful derivation (which ends in a word
containing only terminals) can be obtained only in the presented way.
.
It is easy to see that a successful derivation (which ends in a word
containing only terminals) can be obtained only in the presented way.
Similarly for 


Here orderly were used the productions  (
( times),
times),  ,
,  (
( times),
times),  ,
,  (
( times),
times),  ,
,  (
( times). But
times). But  So
So  ,
,  . It is also easy to see than other words cannot be derived using grammar
. It is also easy to see than other words cannot be derived using grammar  .
.
The grammars  and
and  are not equivalent because
are not equivalent because  .
.
Theorem 1.4 Not all languages can be generated by grammars.
Proof. We encode grammars for the proof as words on the alphabet  . For a given grammar
. For a given grammar  let
let 
 and
and  The encoding is the following:
The encoding is the following:
the code of  is
is  the code of
the code of  is
is 
In the code of the grammar the letters are separated by 000, the code of the arrow is 0000, and the productions are separated by 00000.
It is enough, of course, to encode the productions only. For example, consider the grammar
 .
.
The code of  is 10101, the code of
is 10101, the code of  is 1001001, the code of
is 1001001, the code of  is 10011001. The code of the grammar is
is 10011001. The code of the grammar is


From this encoding results that the grammars with terminal alphabet  can be enumerated as
can be enumerated as  and the set of these grammars is a denumerable infinite set.
and the set of these grammars is a denumerable infinite set.
Footnote Let us suppose that in the alphabet  there is a linear order
there is a linear order  , let us say
, let us say  .
The words which are codes of grammars can be enumerated by ordering
them first after their lengths, and inside the equal length words,
alphabetically, using the order of their letters. But we can use
equally the lexicographic order, which means that
.
The words which are codes of grammars can be enumerated by ordering
them first after their lengths, and inside the equal length words,
alphabetically, using the order of their letters. But we can use
equally the lexicographic order, which means that  (
( is before
is before  ) if
) if  is a proper prefix of
is a proper prefix of  or there exists the decompositions
or there exists the decompositions  and
and  , where
, where  ,
,  ,
,  are subwords,
are subwords,  and
and  letters with
letters with  .
.
Consider now the set of all languages over  denoted by
denoted by  , that is
, that is  . The set
. The set  is denumerable because its words can be ordered. Let this order
is denumerable because its words can be ordered. Let this order  , where
, where  . We associate to each language
. We associate to each language  an infinite binary sequence
an infinite binary sequence  the following way:
the following way:

It
is easy to see that the set of all such binary sequences is not
denumerable, because each sequence can be considered as a positive
number less than 1 using its binary representation (The decimal point
is considered to be before the first digit). Conversely, to each
positive number less than 1 in binary representation a binary sequence
can be associated. So, the cardinality of the set of infinite binary
sequences is equal to cardinality of interval  , which is of continuum power. Therefore the set
, which is of continuum power. Therefore the set  is of continuum cardinality. Now to each grammar with terminal alphabet
is of continuum cardinality. Now to each grammar with terminal alphabet  associate the corresponding generated language over
associate the corresponding generated language over  . Since the cardinality of the set of grammars is denumerable, there will exist a language from
. Since the cardinality of the set of grammars is denumerable, there will exist a language from  , without associated grammar, a language which cannot be generated by a grammar.
, without associated grammar, a language which cannot be generated by a grammar.
Putting some restrictions on the form of productions, four type of grammars can be distinguished.
Definition 1.5 Define for a grammar  the following four types.
the following four types.
A grammar  is of type 0 (phrase-structure grammar) if there are no restrictions on productions.
is of type 0 (phrase-structure grammar) if there are no restrictions on productions.
A grammar  is of type 1 (context-sensitive grammar) if all of its productions are of the form
is of type 1 (context-sensitive grammar) if all of its productions are of the form  , where
, where  ,
,  ,
,  . A production of the form
. A production of the form  can also be accepted if the start symbol
can also be accepted if the start symbol  does not occur in the right-hand side of any production.
does not occur in the right-hand side of any production.
A grammar  is of type 2 (context-free grammar) if all of its productions are of the form
is of type 2 (context-free grammar) if all of its productions are of the form  , where
, where  ,
,  . A production of the form
. A production of the form  can also be accepted if the start symbol
can also be accepted if the start symbol  does not occur in the right-hand side of any production.
does not occur in the right-hand side of any production.
A grammar  is of type 3 (regular grammar) if its productions are of the form
is of type 3 (regular grammar) if its productions are of the form  or
or  , where
, where  and
and  . A production of the form
. A production of the form  can also be accepted if the start symbol
can also be accepted if the start symbol  does not occur in the right-hand side of any production.
does not occur in the right-hand side of any production.
If a grammar  is of type
is of type  then language
then language  is also of type
is also of type  .
.
This classification was introduced by Noam Chomsky.
A language  is of type
is of type  (
( ) if there exists a grammar
) if there exists a grammar  of type
of type  which generates the language
which generates the language  , so
, so  .
.
Denote by  (
( ) the class of the languages of type
) the class of the languages of type  . Can be proved that
. Can be proved that

By the definition of different type of languages, the inclusions ( ) are evident, but the strict inclusions (
) are evident, but the strict inclusions ( ) must be proved.
) must be proved.
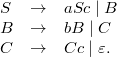
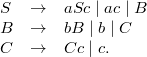
Example 1.3 We give an example for each type of context-sensitive, context-free and regular grammars.
Context-sensitive grammar.  , where
, where 
Elements of  are:
are:
Language  contains words of the form
contains words of the form  with
with  and
and  .
.
Context-free grammar.  , where
, where 
Elements of  are:
are:
Language  contains algebraic expressions which can be correctly built using letter
contains algebraic expressions which can be correctly built using letter  , operators
, operators  and
and  and brackets.
and brackets.
Regular grammar.  , where
, where 
Elements of  are:
are:
Language  contains words over the alphabet
contains words over the alphabet  with at least two letters
with at least two letters  at the beginning.
at the beginning.
It is easy to prove that any finite language is regular. The
productions will be done to generate all words of the language. For
example, if  is in the language, then we introduce the productions:
is in the language, then we introduce the productions:  ,
,  ,
,  , where
, where  is the start symbol of the language and
is the start symbol of the language and  are distinct nonterminals. We define such productions for all words of
the language using different nonterminals for different words,
excepting the start symbol
are distinct nonterminals. We define such productions for all words of
the language using different nonterminals for different words,
excepting the start symbol  . If the empty word is also an element of the language, then the production
. If the empty word is also an element of the language, then the production  is also considered.
is also considered.
The empty set is also a regular language, because the regular grammar  generates it.
generates it.
A production of the form  is called a unit production, where
is called a unit production, where  .
Unit productions can be eliminated from a grammar in such a way that
the new grammar will be of the same type and equivalent to the first
one.
.
Unit productions can be eliminated from a grammar in such a way that
the new grammar will be of the same type and equivalent to the first
one.
Let  be a grammar with unit productions. Define an equivalent grammar
be a grammar with unit productions. Define an equivalent grammar  without unit productions. The following algorithm will construct the equivalent grammar.
without unit productions. The following algorithm will construct the equivalent grammar.
Eliminate-Unit-Productions(
)
1 if the unit productionsand
are in
put also the unit production
in
while
can be extended 2 if the unit production
and the production
(
) are in
put also the production
in
3 let
be the set of productions of
except unit productions 4
RETURN
Clearly,  and
and  are equivalent. If
are equivalent. If  is of type
is of type  then
then  is also of type
is also of type 
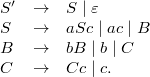
Example 1.4 Use the above algorithm in the case of the grammar  , where
, where  contains
contains

Using the first step of the algorithm, we get the following new unit productions:
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ).
).
In the second step of the algorithm will be considered only productions with  or
or  in the right-hand side, since productions
in the right-hand side, since productions  ,
,  and
and  can be used (the other productions are all unit productions). We get the following new productions:
can be used (the other productions are all unit productions). We get the following new productions:
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ),
),
 (because of
(because of  and
and  ).
).
The new grammar  will have the productions:
will have the productions:

A grammar is to be said a grammar in normal form if its productions have no terminal symbols in the left-hand side.
We need the following notions. For alphabets  and
and  a homomorphism is a function
a homomorphism is a function  for which
for which  . It is easy to see that for arbitrary
. It is easy to see that for arbitrary  value
value  is uniquely determined by the restriction of
is uniquely determined by the restriction of  on
on  , because
, because 
If a homomorphism  is a bijection then
is a bijection then  is an isomorphism.
is an isomorphism.
Theorem 1.6 To any grammar an equivalent grammar in normal form can be associated.
Proof. Grammars of type 2 and 3 have in left-hand side of any productions only a nonterminal, so they are in normal form. The proof has to be done for grammars of type 0 and 1 only.
Let  be the original grammar and we define the grammar in normal form as
be the original grammar and we define the grammar in normal form as  .
.
Let  be those terminal symbols which occur in the left-hand side of productions. We introduce the new nonterminals
be those terminal symbols which occur in the left-hand side of productions. We introduce the new nonterminals  . The following notation will be used:
. The following notation will be used:  ,
,  ,
,  and
and  .
.
Define the isomorphism  , where
, where

Define the set  of production as
of production as

In this case  if and only if
if and only if  From this the theorem immediately results because
From this the theorem immediately results because 
Example 1.5 Let  , where
, where  contains
contains
In the left-hand side of productions the terminals  occur, therefore consider the new nonterminals
occur, therefore consider the new nonterminals  , and include in
, and include in  also the new productions
also the new productions  ,
,  and
and  .
.
Terminals  will be replaced by nonterminals
will be replaced by nonterminals  respectively, and we get the set
respectively, and we get the set  as
as
Let us see what words can be generated by this grammars. It is easy to see that  because
because

 , so
, so 
We prove, using the mathematical induction, that  for
for  . For
. For  this is the case, as we have seen before. Continuing the derivation we get
this is the case, as we have seen before. Continuing the derivation we get  , and this is what we had to prove.
, and this is what we had to prove.
But  So
So  . These words can be generated also in
. These words can be generated also in  .
.
In this subsection extended grammars of type 1, 2 and 3 will be presented.
Extended grammar of type 1. All productions are of the form  , where
, where  , excepted possibly the production
, excepted possibly the production  .
.
Extended grammar of type 2. All productions are of the form  , where
, where 
Extended grammar of type 3. All productions are of the form  or
or  , where
, where  .
.
Theorem 1.7 To any extended grammar an equivalent grammar of the same type can be associated.
Proof. Denote by  the extended grammar and by
the extended grammar and by  the corresponding equivalent grammar of the same type.
the corresponding equivalent grammar of the same type.
Type 1. Define the productions of grammar  by rewriting the productions
by rewriting the productions  , where
, where  of the extended grammar
of the extended grammar  in the form
in the form  allowed in the case of grammar
allowed in the case of grammar  by the following way.
by the following way.
Let  (
( ) be a production of
) be a production of  , which is not in the required form. Add to the set of productions of
, which is not in the required form. Add to the set of productions of  the following productions, where
the following productions, where  are new nonterminals:
are new nonterminals:
Furthermore, add to the set of productions of  without any modification the productions of
without any modification the productions of  which are of permitted form, i.e.
which are of permitted form, i.e.  . Inclusion
. Inclusion  can be proved because each used production of
can be proved because each used production of  in a derivation can be simulated by productions
in a derivation can be simulated by productions  obtained from it. Furthermore, since the productions of
obtained from it. Furthermore, since the productions of  can be used only in the prescribed order, we could not obtain other words, so
can be used only in the prescribed order, we could not obtain other words, so  also is true.
also is true.
Type 2. Let  . Productions of form
. Productions of form  have to be eliminated, only
have to be eliminated, only  can remain, if
can remain, if  doesn't occur in the right-hand side of productions. For this define the following sets:
doesn't occur in the right-hand side of productions. For this define the following sets:


Since for  we have
we have  ,
,  and
and  is a finite set, there must exists such a
is a finite set, there must exists such a  for which
for which  . Let us denote this set as
. Let us denote this set as  . It is easy to see that a nonterminal
. It is easy to see that a nonterminal  is in
is in  if and only if
if and only if  . (In addition
. (In addition  if and only if
if and only if  .)
.)
We define the productions of  starting from the productions of
starting from the productions of  in the following way. For each production
in the following way. For each production  with
with  of
of  add to the set of productions of
add to the set of productions of  this one and all productions which can be obtained from it by eliminating from
this one and all productions which can be obtained from it by eliminating from  one or more nonterminals which are in
one or more nonterminals which are in  , but only in the case when the right-hand side does not become
, but only in the case when the right-hand side does not become  .
.
It in not difficult to see that this grammar  generates the same language as
generates the same language as  does, except the empty word
does, except the empty word  . So, if
. So, if  then the proof is finished. But if
then the proof is finished. But if  , then there are two cases. If the start symbol
, then there are two cases. If the start symbol  does not occur in any right-hand side of productions, then by introducing the production
does not occur in any right-hand side of productions, then by introducing the production  , grammar
, grammar  will generate also the empty word. If
will generate also the empty word. If  occurs in a production in the right-hand side, then we introduce a new start symbol
occurs in a production in the right-hand side, then we introduce a new start symbol  and the new productions
and the new productions  and
and  . Now the empty word
. Now the empty word  can also be generated by grammar
can also be generated by grammar  .
.
Type 3. First we use for  the procedure defined for grammars of type 2 to eliminate productions of the form
the procedure defined for grammars of type 2 to eliminate productions of the form  . From the obtained grammar we eliminate the unit productions using the algorithm
. From the obtained grammar we eliminate the unit productions using the algorithm ELIMINATE-UNIT-PRODUCTIONS.
In the obtained grammar for each production  , where
, where  , add to the productions of
, add to the productions of  also the followings
also the followings
where  are new nonterminals. It is easy to prove that grammar
are new nonterminals. It is easy to prove that grammar  built in this way is equivalent to
built in this way is equivalent to  .
.
Example 1.6 Let  be an extended grammar of type 1, where
be an extended grammar of type 1, where  ,
,  and
and  contains the following productions:
contains the following productions:

The only production which is not context-sensitive is  . Using the method given in the proof, we introduce the productions:
. Using the method given in the proof, we introduce the productions:
Now the grammar  is context-sensitive, where the elements of
is context-sensitive, where the elements of  are
are
It can be proved that  .
.
Example 1.7 Let  be an extended grammar of type 2, where
be an extended grammar of type 2, where  contains:
contains:
Then  ,
,  ,
,  . The productions of the new grammar are:
. The productions of the new grammar are:
The original grammar generates also the empty word and because  occurs in the right-hand side of a production, a new start symbol and two new productions will be defined:
occurs in the right-hand side of a production, a new start symbol and two new productions will be defined:  . The context-free grammar equivalent to the original grammar is
. The context-free grammar equivalent to the original grammar is  with the productions:
with the productions:
Both of these grammars generate language  .
.
Example 1.8 Let  be the extended grammar of type 3 under examination, where
be the extended grammar of type 3 under examination, where  :
:
First, we eliminate production  . Since
. Since  , the productions will be
, the productions will be
The latter production (which a unit production) can also be eliminated, by replacing it with  . Productions
. Productions  and
and  have to be transformed. Since, both productions have the same
right-hand side, it is enough to introduce only one new nonterminal and
to use the productions
have to be transformed. Since, both productions have the same
right-hand side, it is enough to introduce only one new nonterminal and
to use the productions  and
and  instead of
instead of  . Production
. Production  will be replaced by
will be replaced by  . The new grammar is
. The new grammar is  , where
, where  :
:
Can be proved that  .
.
We will prove the following theorem, by which the Chomsky-classes of
languages are closed under the regular operations, that is, the union
and product of two languages of type  is also of type
is also of type  , the iteration of a language of type
, the iteration of a language of type  is also of type
is also of type  (
( ).
).
Theorem 1.8 The class  (
( ) of languages is closed under the regular operations.
) of languages is closed under the regular operations.
Proof. For the proof we will use extended grammars. Consider the extended grammars  and
and  of type
of type  each. We can suppose that
each. We can suppose that  .
.
Union. Let  .
.
We will show that  If
If  then from the assumption that
then from the assumption that  and
and  are of type
are of type  follows by definition that
follows by definition that  also is of type
also is of type  . If
. If  and one of the grammars generates the empty word, then we eliminate from
and one of the grammars generates the empty word, then we eliminate from  the corresponding production (possibly the both)
the corresponding production (possibly the both)  (
( ) and replace it by production
) and replace it by production  .
.
Product. Let  .
.
We will show that  By definition, if
By definition, if  then
then  will be of the same type. If
will be of the same type. If  and there is production
and there is production  in
in  but there is no production
but there is no production  in
in  then production
then production  will be replaced by
will be replaced by  . We will proceed the same way in the symmetrical case. If there is in
. We will proceed the same way in the symmetrical case. If there is in  production
production  and in
and in  production
production  then they will be replaced by
then they will be replaced by  .
.
In the case of regular grammars ( ), because
), because  is not a regular production, we need to use another grammar
is not a regular production, we need to use another grammar  , where the difference between
, where the difference between  and
and  lies in that instead of productions in the form
lies in that instead of productions in the form  in
in  will exist production of the form
will exist production of the form  .
.
Iteration. Let  .
.
In the case of grammars of type 2 let  . Then
. Then  also is of type 2.
also is of type 2.
In the case of grammars of type 3, as in the case of product, we will change the productions, that is  , where the difference between
, where the difference between  and
and  lies in that for each
lies in that for each  will be replaced by
will be replaced by  , and the others will be not changed. Then
, and the others will be not changed. Then  also will be of type 3.
also will be of type 3.
The productions given in the case of type 2 are not valid for  , because when applying production
, because when applying production  we can get the derivations of type
we can get the derivations of type  ,
,  ,
,  , where
, where  can be a left-hand side of a production. In this case, replacing
can be a left-hand side of a production. In this case, replacing  by its right-hand side in derivation
by its right-hand side in derivation  ,
we can generate a word which is not in the iterated language. To avoid
such situations, first let us assume that the language is in normal
form, i.e. the left-hand side of productions does not contain terminals
(see Section 1.1), second we introduce a new nonterminal
,
we can generate a word which is not in the iterated language. To avoid
such situations, first let us assume that the language is in normal
form, i.e. the left-hand side of productions does not contain terminals
(see Section 1.1), second we introduce a new nonterminal  , so the set of nonterminals now is
, so the set of nonterminals now is  , and the productions are the following:
, and the productions are the following:

Now
we can avoid situations in which the left-hand side of a production can
extend over the limits of words in a derivation because of the
iteration. The above derivations can be used only by beginning with  and getting derivation
and getting derivation  . Here we can not replace
. Here we can not replace  unless the last symbol in
unless the last symbol in  is a terminal symbol, and only after using a production of the form
is a terminal symbol, and only after using a production of the form  .
.
It is easy to show that  for each type.
for each type.
Exercises
1.1-1 Give a grammar which generates language  and determine its type.
and determine its type.
1.1-2 Let  be an extended context-free grammar, where
be an extended context-free grammar, where  ,
, 
 .
.
Give an equivalent context-free grammar.
1.1-3 Show that  and
and  are regular languages over arbitrary alphabet
are regular languages over arbitrary alphabet  .
.
1.1-4 Give a grammar to generate language  , where
, where  represents the number of 0's in word
represents the number of 0's in word  and
and  the number of 1's.
the number of 1's.
1.1-5 Give a grammar to generate all natural numbers.
1.1-6 Give a grammar to generate the following languages, respectively:
 ,
,
 ,
,
 ,
,
 .
.
1.1-7 Let  be an extended grammar, where
be an extended grammar, where  ,
,  and
and  contains the productions:
contains the productions:

Determine the type of this grammar. Give an equivalent, not extended grammar with the same type. What language it generates?
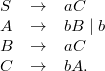
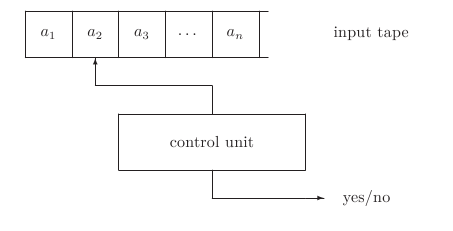
Finite automata are computing models with input tape and a finite set of states (Fig. 1.1). Among the states some are called initial and some final. At the beginning the automaton read the first letter of the input word written on the input tape. Beginning with an initial state, the automaton read the letters of the input word one after another while change its states, and when after reading the last input letter the current state is a final one, we say that the automaton accepts the given word. The set of words accepted by such an automaton is called the language accepted (recognized) by the automaton.
Definition 1.9 A nondeterministic finite automaton (NFA) is a system  , where
, where

 is a finite, nonempty set of states,
is a finite, nonempty set of states,

 is the input alphabet,
is the input alphabet,

 is the set of transitions (or of edges), where
is the set of transitions (or of edges), where  ,
,

 is the set of initial states,
is the set of initial states,

 is the set of final states.
is the set of final states.
An NFA is in fact a directed, labelled graph, whose vertices are the states and there is a (directed) edge labelled with  from vertex
from vertex  to vertex
to vertex  if
if  .
Among vertices some are initial and some final states. Initial states
are marked by a small arrow entering the corresponding vertex, while
the final states are marked with double circles. If two vertices are
joined by two edges with the same direction then these can be replaced
by only one edge labelled with two letters. This graph can be called a
transition graph.
.
Among vertices some are initial and some final states. Initial states
are marked by a small arrow entering the corresponding vertex, while
the final states are marked with double circles. If two vertices are
joined by two edges with the same direction then these can be replaced
by only one edge labelled with two letters. This graph can be called a
transition graph.
 , where
, where  ,
,  ,
, 
 ,
, 
The automaton can be seen in Fig. 1.2.
In the case of an edge  vertex
vertex  is the start-vertex,
is the start-vertex,  the end-vertex and
the end-vertex and  the label. Now define the notion of the walk as in the case of graphs. A sequence
the label. Now define the notion of the walk as in the case of graphs. A sequence

of edges of a NFA is a walk with the label  . If
. If  then
then  and
and  . Such a walk is called an empty walk. For a walk the notation
. Such a walk is called an empty walk. For a walk the notation

will be used, or if  then we write shortly
then we write shortly  . Here
. Here  is the start-vertex and
is the start-vertex and  the end-vertex of the walk. The states in a walk are not necessary distinct. A walk is productive if its start-vertex is an initial state and its end-vertex is a final state. We say that an NFA accepts or recognizes a word if this word is the label of a productive walk. The empty word
the end-vertex of the walk. The states in a walk are not necessary distinct. A walk is productive if its start-vertex is an initial state and its end-vertex is a final state. We say that an NFA accepts or recognizes a word if this word is the label of a productive walk. The empty word  is accepted by an NFA if there is an empty productive walk, i.e. there is an initial state which is also a final state.
is accepted by an NFA if there is an empty productive walk, i.e. there is an initial state which is also a final state.

The set of words accepted by an NFA will be called the language accepted by this NFA. The language accepted or recognized by NFA  is
is

The NFA  and
and  are equivalent if
are equivalent if  .
.
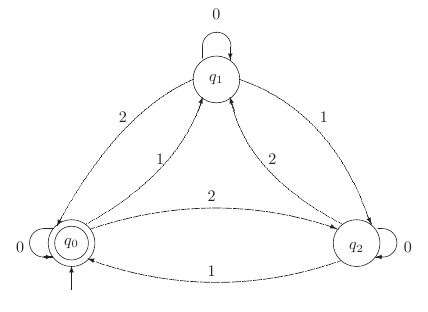
Sometimes it is useful the following transition function:

This function associate to a state  and input letter
and input letter  the set of states in which the automaton can go if its current state is
the set of states in which the automaton can go if its current state is  and the head is on input letter
and the head is on input letter  .
.
Denote by  the cardinal (the number of elements) of
the cardinal (the number of elements) of  .
.
Footnote. The same notation
is used for the cardinal of a set and length of a word, but this is no
matter of confusion because for word we use lowercase letters and for
set capital letters. The only exception is  , but this could not be confused with a word.
, but this could not be confused with a word.
An NFA is a deterministic finite automaton (DFA) if

In Fig. 1.2 a DFA can be seen.
Condition  can be replaced by
can be replaced by

If for a DFA  for each state
for each state  and for each letter
and for each letter  then it is called a complete DFA.
then it is called a complete DFA.
Every DFA can be transformed in a complete DFA by introducing a new state, which can be called a snare state. Let  be a DFA. An equivalent and complete DFA will be
be a DFA. An equivalent and complete DFA will be  , where
, where  is the new state and
is the new state and  . It is easy to see that
. It is easy to see that  .
Using the transition function we can easily define the transition
table. The rows of this table are indexed by the elements of
.
Using the transition function we can easily define the transition
table. The rows of this table are indexed by the elements of  , its columns by the elements of
, its columns by the elements of  . At the intersection of row
. At the intersection of row  and column
and column  we put
we put  . In the case of Fig. 1.2, the transition table is:
. In the case of Fig. 1.2, the transition table is:
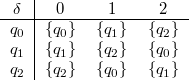
The NFA in Fig. 1.3 are not deterministic: the first (automaton A) has two initial states, the second (automaton B) has two transitions with  from state
from state  (to states
(to states  and
and  ). The transition table of these two automata are in Fig. 1.4.
). The transition table of these two automata are in Fig. 1.4.  is set of words over
is set of words over  which do not begin with two zeroes (of course
which do not begin with two zeroes (of course  is in language),
is in language),  is the set of words which contain
is the set of words which contain  as a subword.
as a subword.
Eliminating inaccessible states.
Let  be a finite automaton. A state is accessible
if it is on a walk which starts by an initial state. The following
algorithm determines the inaccessible states building a sequence
be a finite automaton. A state is accessible
if it is on a walk which starts by an initial state. The following
algorithm determines the inaccessible states building a sequence  ,
,  ,
,  of sets, where
of sets, where  is the set of initial states, and for any
is the set of initial states, and for any 
 is the set of accessible states, which are at distance at most
is the set of accessible states, which are at distance at most  from an initial state.
from an initial state.
Inaccessible-States(A)
12
3
REPEAT45
FORall6
DOFORall7
DO8
UNTIL9
10
RETURN
The inaccessible states of the automaton can be eliminated without changing the accepted language.
If  and
and  then the running time of the algorithm (the number of steps) in the worst case is
then the running time of the algorithm (the number of steps) in the worst case is  , because the number of steps in the two embedded loops is at most
, because the number of steps in the two embedded loops is at most  and in the loop
and in the loop rEPEAT at most  .
.
Set  has the property that
has the property that  if and only if
if and only if  . The above algorithm can be extended by inserting the
. The above algorithm can be extended by inserting the  condition to decide if language
condition to decide if language  is or not empty.
is or not empty.
Eliminating nonproductive states.
Let  be a finite automaton. A state is productive
if it is on a walk which ends in a terminal state. For finding the
productive states the following algorithm uses the function
be a finite automaton. A state is productive
if it is on a walk which ends in a terminal state. For finding the
productive states the following algorithm uses the function  :
:

This function for a state  and a letter
and a letter  gives the set of all states from which using this letter
gives the set of all states from which using this letter  the automaton can go into the state
the automaton can go into the state  .
.
Nonproductive-States(A)
12
3
REPEAT45
FORall6
DOFORall7
DO8
UNTIL9
10
RETURN
The nonproductive states of the automaton can be eliminated without changing the accepted language.
If  is the number of states,
is the number of states,  the number of letters in the alphabet, then the running time of the algorithm is also
the number of letters in the alphabet, then the running time of the algorithm is also  as in the case of the algorithm
as in the case of the algorithm INACCESSIBLE-STATES.
The set  given by the algorithm has the property that
given by the algorithm has the property that  if and only if
if and only if  . So, by a little modification it can be used to decide if language
. So, by a little modification it can be used to decide if language  is or not empty.
is or not empty.
As follows we will show that any NFA can be transformed in an equivalent DFA.
Theorem 1.10 For any NFA one may construct an equivalent DFA.
Proof. Let  be an NFA. Define a DFA
be an NFA. Define a DFA  , where
, where

 ,
,
 edges of
edges of  are those triplets
are those triplets  for which
for which  are not empty,
are not empty,  and
and  ,
,

 ,
,

 .
.
We prove that  .
.
a) First prove that  . Let
. Let  . Then there exists a walk
. Then there exists a walk

Using the transition function  of NFA
of NFA  we construct the sets
we construct the sets  ,
,  . Then
. Then  and since
and since  we get
we get  , so
, so  . Thus, there exists a walk
. Thus, there exists a walk

There are sets  for which
for which  , and for
, and for  we have
we have  , and
, and

is a productive walk. Therefore  . That is
. That is  .
.
b) Now we show that  . Let
. Let  . Then there is a walk
. Then there is a walk

Using the definition of  we have
we have  , i.e. there exists
, i.e. there exists  , that is by the definitions of
, that is by the definitions of  and
and  there is
there is  such that
such that  . Similarly, there are the states
. Similarly, there are the states  such that
such that  , where
, where  , thus, there is a walk
, thus, there is a walk

so  .
.
In constructing DFA we can use the corresponding transition function  :
:
The empty set was excluded from the states, so we used here  instead of
instead of  .
.
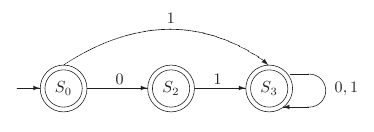
Example 1.10 Apply Theorem 1.10 to transform NFA  in Fig. 1.3. Introduce the following notation for the states of the DFA:
in Fig. 1.3. Introduce the following notation for the states of the DFA:

where  is the initial state. Using the transition function we get the transition table:
is the initial state. Using the transition function we get the transition table:
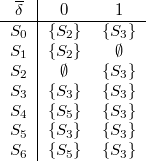
This automaton contains many inaccessible states. By algorithm INACCESSIBLE-STATES we determine the accessible states of DFA:
 .
.
Initial state  is also a final state. States
is also a final state. States  and
and  are final states. States
are final states. States  are inaccessible and can be removed from the DFA. The transition table of the resulted DFA is
are inaccessible and can be removed from the DFA. The transition table of the resulted DFA is
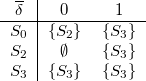
The corresponding transition graph is in Fig. 1.5.
The algorithm given in Theorem 1.10 can be simplified. It is not necessary to consider all subset of the set of states of NFA. The states of DFA  can be obtained successively. Begin with the state
can be obtained successively. Begin with the state  and determine the states
and determine the states  for all
for all  . For the newly obtained states we determine the states accessible from them. This can be continued until no new states arise.
. For the newly obtained states we determine the states accessible from them. This can be continued until no new states arise.
In our previous example  is the initial state. From this we get
is the initial state. From this we get

The transition table is
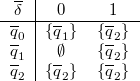
which is the same (excepted the notation) as before.
The next algorithm will construct for an NFA  the transition table
the transition table  of the equivalent DFA
of the equivalent DFA  , but without to determine the final states (which can easily be included). Value of
, but without to determine the final states (which can easily be included). Value of ISIN( ) in the algorithm is true if state
) in the algorithm is true if state  is already in
is already in  and is false otherwise. Let
and is false otherwise. Let  be an ordered list of the letters of
be an ordered list of the letters of  .
.
NFA-DFA(A)
12
3


counts the rows. 4


counts the states. 5
REPEAT6FOR

counts the columns. 7
DO8
IF9
THENIFISIN() 10
THEN11
ELSE12
13
14
15
ELSE16
17
UNTIL18
RETURNtransition tableof

Since loop rEPEAT
is executed as many times as the number of states of new automaton, in
worst case the running time can be exponential, because, if the number
of states in NFA is  , then DFA can have even
, then DFA can have even  states. (The number of subsets of a set of
states. (The number of subsets of a set of  elements is
elements is  , including the empty set.)
, including the empty set.)
Theorem 1.10 will have it that to any NFA one may construct an equivalent DFA. Conversely, any DFA is also an NFA by definition. So, the nondeterministic finite automata accepts the same class of languages as the deterministic finite automata.
In this subsection we will use complete deterministic finite automata only. In this case  has a single element. In formulae, sometimes, instead of set
has a single element. In formulae, sometimes, instead of set  we will use its single element. We introduce for a set
we will use its single element. We introduce for a set  the function
the function  which give us the single element of set
which give us the single element of set  , so
, so  .
Using walks which begin with the initial state and have the same label
in two DFA's we can determine the equivalence of these DFA's. If only
one of these walks ends in a final state, then they could not be
equivalent.
.
Using walks which begin with the initial state and have the same label
in two DFA's we can determine the equivalence of these DFA's. If only
one of these walks ends in a final state, then they could not be
equivalent.
Consider two DFA's over the same alphabet  and
and  . We are interested to determine if they are or not equivalent. We construct a table with elements of form
. We are interested to determine if they are or not equivalent. We construct a table with elements of form  , where
, where  and
and  . Beginning with the second column of the table, we associate a column to each letter of the alphabet
. Beginning with the second column of the table, we associate a column to each letter of the alphabet  . If the first element of the
. If the first element of the  th row is
th row is  then at the cross of
then at the cross of  th row and the column associated to letter
th row and the column associated to letter  will be the pair
will be the pair  .
.
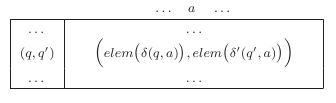
In the first column of the first row we put  and complete the first row using the above method. If in the first row
in any column there occur a pair of states from which one is a final
state and the other not then the algorithm ends, the two automata are not equivalent.
If there is no such a pair of states, every new pair is written in the
first column. The algorithm continues with the next unfilled row. If no
new pair of states occurs in the table and for each pair both of states
are final or both are not, then the algorithm ends and the two DFA are equivalent.
and complete the first row using the above method. If in the first row
in any column there occur a pair of states from which one is a final
state and the other not then the algorithm ends, the two automata are not equivalent.
If there is no such a pair of states, every new pair is written in the
first column. The algorithm continues with the next unfilled row. If no
new pair of states occurs in the table and for each pair both of states
are final or both are not, then the algorithm ends and the two DFA are equivalent.
If  ,
,  and
and  then taking into account that in worst case loop
then taking into account that in worst case loop rEPEAT is executed  times, loop
times, loop fOR  times, the running time of the algorithm in worst case will be
times, the running time of the algorithm in worst case will be  , or if
, or if  then
then  .
.
Our algorithm was described to determine the equivalence of two complete DFA's. If we have to determine the equivalence of two NFA's, first we transform them into complete DFA's and after this we can apply the above algorithm.
DFA-Equivalence(
)
1 write in the first column of the first row the pair2
3
REPEAT45 let
be the pair in the first column of the
th row 6
FORall7
DOwrite in the column associated toin the
th row the pair
8
IFone state inis final and the other not 9
THENRETURNNO 10ELSEwrite pairin the next empty row of the first column, if not occurred already in the first column 11
UNTILthe first element ofth row becomes empty 12
RETURNYES
Example 1.11 Determine if the two DFA's in Fig. 1.6 are equivalent or not. The algorithm gives the table
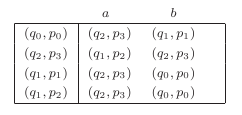
The two DFA's are equivalent because all possible pairs of states are considered and in every pair both states are final or both are not final.
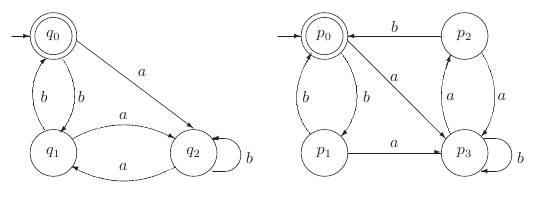
Example 1.12 The table of the two DFA's in Fig. 1.7 is:
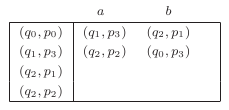 |
These two DFA's are not equivalent, because in the last column of the second row in the pair  the first state is final and the second not.
the first state is final and the second not.
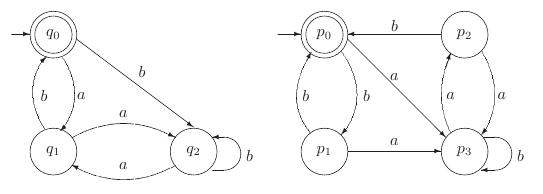
We have seen that NFA's accept the same class of languages as DFA's. The following theorem states that this class is that of regular languages.
Theorem 1.11 If  is a language accepted by a DFA, then one may construct a regular grammar which generates language
is a language accepted by a DFA, then one may construct a regular grammar which generates language  .
.
Proof. Let  be the DFA accepting language
be the DFA accepting language  , that is
, that is  . Define the regular grammar
. Define the regular grammar  with the productions:
with the productions:
 If
If  for
for  and
and  , then put production
, then put production  in
in  .
.
 If
If  and
and  , then put also production
, then put also production  in
in  .
.
Prove that  .
.
Let  and
and  . Thus, since
. Thus, since  accepts word
accepts word  , there is a walk
, there is a walk

Then there are in  the productions
the productions

(in the right-hand side of the last production  does not occur, because
does not occur, because  ), so there is the derivation
), so there is the derivation

Therefore,  .
.
Conversely, let  and
and  . Then there exists a derivation
. Then there exists a derivation

in which productions

were used, which by definition means that in DFA  there is a walk
there is a walk

and since  is a final state,
is a final state,  .
.
If the DFA accepts also the empty word  , then in the above grammar we introduce a new start symbol
, then in the above grammar we introduce a new start symbol  instead of
instead of  , consider the new production
, consider the new production  and for each production
and for each production  introduce also
introduce also  .
.
Example 1.13 Let  be a DFA, where
be a DFA, where  . The corresponding transition table is
. The corresponding transition table is
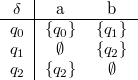
The transition graph of  is in Fig. 1.8. By Theorem 1.11 we define regular grammar
is in Fig. 1.8. By Theorem 1.11 we define regular grammar  with the productions in
with the productions in 

One may prove that  .
.
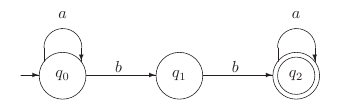
The method described in the proof of Theorem 1.11 easily can be given as an algorithm. The productions of regular grammar  obtained from the DFA
obtained from the DFA  can be determined by the following algorithm.
can be determined by the following algorithm.
Regular-Grammar-from-DFA(A)
12
FORall3
DOFORall4
DOFORall5
DOIF6
THEN7
IF8
THEN9
IF10
THEN11
RETURN
It is easy to see that the running time of the algorithm is  , if the number of states is
, if the number of states is  and the number of letter in alphabet is
and the number of letter in alphabet is  . In lines 2–4 we can consider only one loop, if we use the elements of
. In lines 2–4 we can consider only one loop, if we use the elements of  . Then the worst case running time is
. Then the worst case running time is  , where
, where  is the number of transitions of DFA. This is also
is the number of transitions of DFA. This is also  , since all transitions are possible. This algorithm is:
, since all transitions are possible. This algorithm is:
Regular-Grammar-from-Dfa'(A)
12
FORall3
DO4
IF5
THEN6
IF7
THEN8
RETURN
Theorem 1.12 If  is a regular language, then one may construct an NFA that accepts language
is a regular language, then one may construct an NFA that accepts language  .
.
Proof. Let  be the grammar which generates language
be the grammar which generates language  . Define NFA
. Define NFA  :
:

 , where
, where  (i.e.
(i.e.  is a new symbol),
is a new symbol),
 For every production
For every production  , define transition
, define transition  in
in  .
.
 For every production
For every production  , define transition
, define transition  in
in  .
.


Prove that  .
.
Let  ,
,  . Then there is in
. Then there is in  a derivation of word
a derivation of word  :
:

This derivation is based on productions

Then, by the definition of the transitions of NFA  there exists a walk
there exists a walk

Thus,  . If
. If  , there is production
, there is production  , but in this case the initial state is also a final one, so
, but in this case the initial state is also a final one, so  . Therefore,
. Therefore,  .
.
Let now  . Then there exists a walk
. Then there exists a walk

If  is the empty word, then instead of
is the empty word, then instead of  we have in the above formula
we have in the above formula  , which also is a final state. In other cases only
, which also is a final state. In other cases only  can be as last symbol. Thus, in
can be as last symbol. Thus, in  there exist the productions
there exist the productions

and there is the derivation

thus,  and therefore
and therefore  .
.
Example 1.14 Let  be a regular grammar. The NFA associated is
be a regular grammar. The NFA associated is  , where
, where  . The corresponding transition table is
. The corresponding transition table is
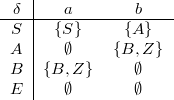
The transition graph is in Fig. 1.9. This NFA can be simplified, states  and
and  can be contracted in one final state.
can be contracted in one final state.
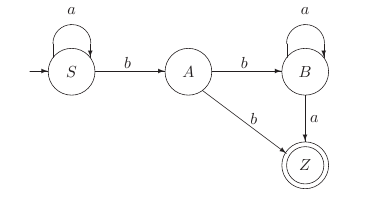
Using the above theorem we define an algorithm which associate an NFA  to a regular grammar
to a regular grammar  .
.
NFA-from-Regular-Grammar(A)
12
3
FORall4
DOFORall5
DOIF6
THEN7
FORall8
DOIF9
THEN10
IF11
THEN12
ELSE13
RETURNA
As in the case of algorithm REGULAR-GRAMMAR-FROM-DFA, the running time is  , where
, where  is number of nonterminals and
is number of nonterminals and  the number of terminals. Loops in lines 3, 4 and 7 can be replaced by
only one, which uses productions. The running time in this case is
better and is equal to
the number of terminals. Loops in lines 3, 4 and 7 can be replaced by
only one, which uses productions. The running time in this case is
better and is equal to  , if
, if  is the number of productions. This algorithm is:
is the number of productions. This algorithm is:
NFA-from-Regular-Grammar'(A)
12
3
FORall4
DOIF5
THEN6
IF7
THEN8
IF9
THEN10
ELSE11
RETURNA
From Theorems 1.10, 1.11 and 1.12 results that the class of regular languages coincides with the class of languages accepted by NFA's and also with class of languages accepted by DFA's. The result of these three theorems is illustrated in Fig. 1.10 and can be summarised also in the following theorem.
Figure 1.10. Relations between regular grammars and finite automata. To any regular grammar one may construct an NFA which accepts the language generated by that grammar. Any NFA can be transformed in an equivalent DFA. To any DFA one may construct a regular grammar which generates the language accepted by that DFA.
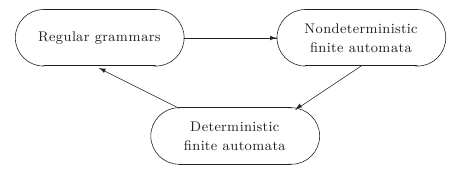
Theorem 1.13 The following three class of languages are the same:
 the class of regular languages,
the class of regular languages,
 the class of languages accepted by DFA's,
the class of languages accepted by DFA's,
 the class of languages accepted by NFA's.
the class of languages accepted by NFA's.
It is known (see Theorem 1.8) that the set  of regular languages is closed under the regular operations, that is if
of regular languages is closed under the regular operations, that is if  are regular languages, then languages
are regular languages, then languages  ,
,  and
and  are also regular. For regular languages are true also the following statements.
are also regular. For regular languages are true also the following statements.
The complement of a regular language is also regular. This is easy to prove using automata. Let  be a regular language and let
be a regular language and let  be a DFA which accepts language
be a DFA which accepts language  . It is easy to see that the DFA
. It is easy to see that the DFA  accepts language
accepts language  . So,
. So,  is also regular.
is also regular.
The intersection of two regular languages is also regular. Since  , the intersection is also regular.
, the intersection is also regular.
The difference of two regular languages is also regular. Since  , the difference is also regular.
, the difference is also regular.
A finite automaton with  -moves (FA with
-moves (FA with  -moves) extends NFA in such way that it may have transitions on the empty input
-moves) extends NFA in such way that it may have transitions on the empty input  , i.e. it may change a state without reading any input symbol. In the case of a FA with
, i.e. it may change a state without reading any input symbol. In the case of a FA with  -moves
-moves  for the set of transitions it is true that
for the set of transitions it is true that  .
.
The transition function of a FA with  -moves is:
-moves is:

The FA with  -moves in Fig. 1.11 accepts words of form
-moves in Fig. 1.11 accepts words of form  , where
, where  and
and  .
.
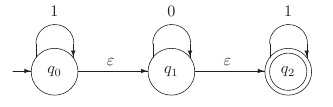
Theorem 1.14 To any FA with  -moves one may construct an equivalent NFA (without
-moves one may construct an equivalent NFA (without  -moves).
-moves).
Let  be an FA with
be an FA with  -moves and we construct an equivalent NFA
-moves and we construct an equivalent NFA  . The following algorithm determines sets
. The following algorithm determines sets  and
and  . For a state
. For a state  denote by
denote by  the set of states (including even
the set of states (including even  ) in which one may go from
) in which one may go from  using
using  -moves only. This may be extended also to sets
-moves only. This may be extended also to sets

Clearly, for all  and
and  both
both  and
and  may be computed. Suppose in the sequel that these are given.
may be computed. Suppose in the sequel that these are given.
The following algorithm determine the transitions using the transition function  , which is defined in line 5.
, which is defined in line 5.
If  and
and  , then lines 2–6 show that the running time in worst case is
, then lines 2–6 show that the running time in worst case is  .
.
Eliminate-Epsilon-Moves(A)
12
FORall3
DOFORall4
DO5
6
7
RETURN
Example 1.15 Consider the FA with  -moves in Fig. 1.11. The corresponding transition table is:
-moves in Fig. 1.11. The corresponding transition table is:
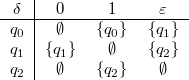
Apply algorithm ELIMINATE-EPSILON-MOVES.
 ,
,  ,
, 
 , and its intersection with
, and its intersection with  is not empty, thus
is not empty, thus  .
.

 ,
, 
 .
.

 ,
, 


 ,
, 


 ,
, 





 ,
, 
 .
.
The transition table of NFA  is:
is:
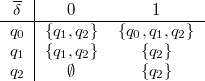
and the transition graph is in Fig. 1.12.
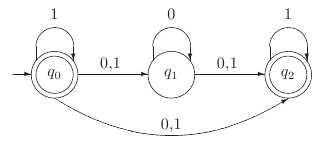
Define regular operations on NFA: union, product and iteration. The result will be an FA with  -moves.
-moves.
Operation will be given also by diagrams. An NFA is given as in Fig. 1.13(a). Initial states are represented by a circle with an arrow, final states by a double circle.
Figure 1.13. (a) Representation of an NFA. Initial states are represented by a circle with an arrow, final states by a double circle. (b) Union of two NFA's.
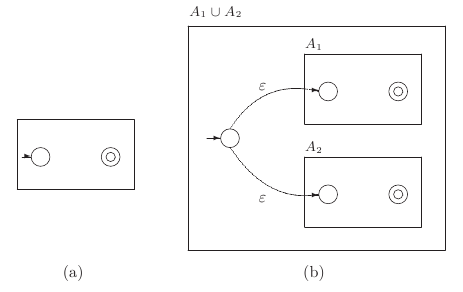
Let  and
and  be NFA. The result of any operation is a FA with
be NFA. The result of any operation is a FA with  -moves
-moves  . Suppose that
. Suppose that  always. If not, we can rename the elements of any set of states.
always. If not, we can rename the elements of any set of states.
Union.  , where
, where
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
For the result of the union see Fig. 1.13(b). The result is the same if instead of a single initial state we choose as set of initial states the union  . In this case the result automaton will be without
. In this case the result automaton will be without  -moves. By the definition it is easy to see that
-moves. By the definition it is easy to see that  .
.
Product.  , where
, where
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
For the result automaton see Fig. 1.14(a). Here also  .
.
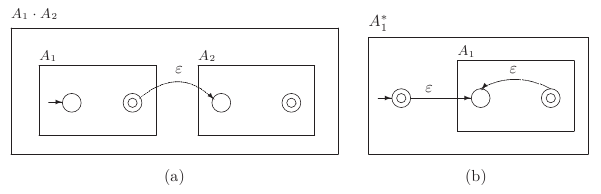
Iteration.  , where
, where
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
The iteration of an FA can be seen in Fig. 1.14(b). For this operation it is also true that  .
.
The definition of these tree operations proves again that regular languages are closed under the regular operations.
A DFA  is called minimum state automaton if for any equivalent complete DFA
is called minimum state automaton if for any equivalent complete DFA  it is true that
it is true that  . We give an algorithm which builds for any complete DFA an equivalent minimum state automaton.
. We give an algorithm which builds for any complete DFA an equivalent minimum state automaton.
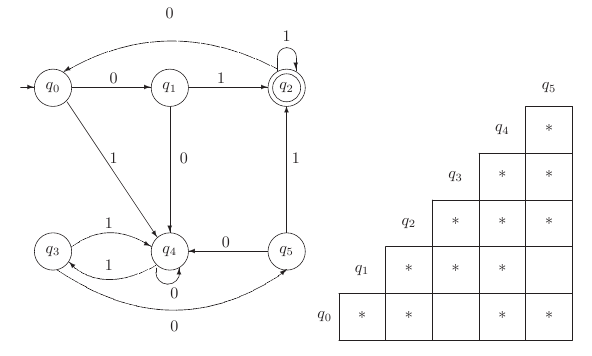
States  and
and  of an DFA
of an DFA  are equivalent if for arbitrary word
are equivalent if for arbitrary word  we reach from both either final or nonfinal states, that is
we reach from both either final or nonfinal states, that is
 if for any word
if for any word 

If two states are not equivalent, then they are distinguishable. In
the following algorithm the distinguishable states will be marked by a
star, and equivalent states will be merged. The algorithm will
associate list of pair of states with some pair of states expecting a
later marking by a star, that is if we mark a pair of states by a star,
then all pairs on the associated list will be also marked by a star.
The algorithm is given for DFA without inaccessible states. The used
DFA is complete, so  contains exact one element, function
contains exact one element, function  defined in Subsection 1.2.2, which gives the unique element of the set, will be also used here.
defined in Subsection 1.2.2, which gives the unique element of the set, will be also used here.
Automaton-Minimization(
)
1 mark with a star all pairs of statesfor which
and
or
and
2 associate an empty list with each unmarked pair
3
FORall unmarked pair of statesand for all symbol
examine pairs of states

IFany of these pairs is marked,THENmark also pairwith all the elements on the list before associated with pair

ELSEIFall the above pairs are unmarkedTHENput pairon each list associated with pairs
, unless
4 merge all unmarked (equivalent) pairs
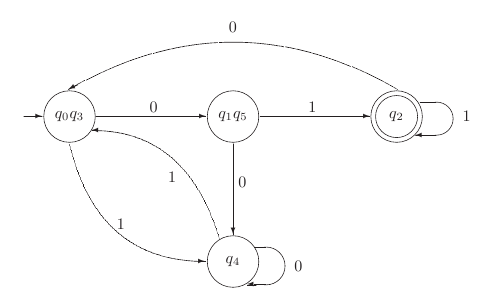
After
finishing the algorithm, if a cell of the table does not contain a
star, then the states corresponding to its row and column index, are
equivalent and may be merged. Merging states is continued until it is
possible. We can say that the equivalence relation decomposes the set
of states in equivalence classes, and the states in such a class may be
all merged.
Remark. The above algorithm
can be used also in the case of an DFA which is not complete, that is
there are states for which does not exist transition. Then a pair  may occur, and if
may occur, and if  is a final state, consider this pair marked.
is a final state, consider this pair marked.
Example 1.16 Let be the DFA in Fig. 1.15. We will use a table for marking pairs with a star. Marking pair  means putting a star in the cell corresponding to row
means putting a star in the cell corresponding to row  and column
and column  (or row
(or row  and column
and column  ).
).
First we mark pairs  ,
,  ,
,  ,
,  and
and  (because
(because  is the single final state). Then consider all unmarked pairs and
examine them as the algorithm requires. Let us begin with pair
is the single final state). Then consider all unmarked pairs and
examine them as the algorithm requires. Let us begin with pair  . Associate with it pairs
. Associate with it pairs  , that is
, that is  ,
,  . Because pair
. Because pair  is already marked, mark also pair
is already marked, mark also pair  .
.
In the case of pair  the new pairs are
the new pairs are  and
and  . With pair
. With pair  associate pair
associate pair  on a list, that is
on a list, that is

Now continuing with  one obtain pairs
one obtain pairs  and
and  , with which nothing are associated by algorithm.
, with which nothing are associated by algorithm.
Continue with pair  . The associated pairs are
. The associated pairs are  and
and  . None of them are marked, so associate with them on a list pair
. None of them are marked, so associate with them on a list pair  , that is
, that is

Now continuing with  we get the pairs
we get the pairs  and
and  , and because this latter is marked we mark pair
, and because this latter is marked we mark pair  and also pair
and also pair  associated to it on a list. Continuing we will get the table in Fig. 1.15, that is we get that
associated to it on a list. Continuing we will get the table in Fig. 1.15, that is we get that  and
and  . After merging them we get an equivalent minimum state automaton (see Fig. 1.16).
. After merging them we get an equivalent minimum state automaton (see Fig. 1.16).
The following theorem, called pumping lemma for historical reasons, may be efficiently used to prove that a language is not regular. It is a sufficient condition for a regular language.
Theorem 1.15 (pumping lemma) For any regular language  there exists a natural number
there exists a natural number  (depending only on
(depending only on  ), such that any word
), such that any word  of
of  with length at least
with length at least  may be written as
may be written as  such that
such that
(1)  ,
,
(2)  ,
,
(3)  for all
for all  .
.
Proof. If  is a regular language, then there is such an DFA which accepts
is a regular language, then there is such an DFA which accepts  (by Theorems 1.12 and 1.10). Let
(by Theorems 1.12 and 1.10). Let  be this DFA, so
be this DFA, so  . Let
. Let  be the number of its states, that is
be the number of its states, that is  . Let
. Let  and
and  . Then, because the automaton accepts word
. Then, because the automaton accepts word  , there are states
, there are states  and walk
and walk

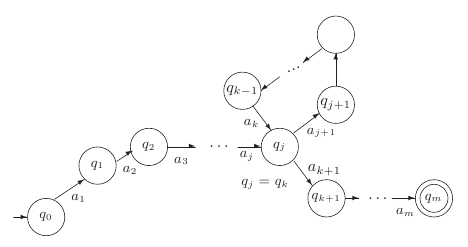
Because the number of states is  and
and  , by the pigeonhole principle states
, by the pigeonhole principle states  can not all be distinct (see Fig. 1.17), there are at least two of them which are equal.
can not all be distinct (see Fig. 1.17), there are at least two of them which are equal.
Footnote. Pigeonhole principle: If we have to put more than  objects into
objects into  boxes, then at least one box will contain at least two objects.
boxes, then at least one box will contain at least two objects.
Let  , where
, where  and
and  is the least such index. Then
is the least such index. Then  . Decompose word
. Decompose word  as:
as:


 .
.
This decomposition immediately yields to  and
and  . We will prove that
. We will prove that  for any
for any  .
.
Because  , there exists an walk
, there exists an walk

and because of  , this may be written also as
, this may be written also as

From this walk  can be omitted or can be inserted many times. So, there are the following walks:
can be omitted or can be inserted many times. So, there are the following walks:


Therefore  for all
for all  , and this proves the theorem.
, and this proves the theorem.
Example 1.17 We use the pumping lemma to show that  is not regular. Assume that
is not regular. Assume that  is regular, and let
is regular, and let  be the corresponding natural number given by the pumping lemma. Because the length of the word
be the corresponding natural number given by the pumping lemma. Because the length of the word  is
is  , this word can be written as in the lemma. We prove that this leads to a contradiction. Let
, this word can be written as in the lemma. We prove that this leads to a contradiction. Let  be the decomposition as in the lemma. Then
be the decomposition as in the lemma. Then  , so
, so  and
and  can contain no other letters than
can contain no other letters than  , and because we must have
, and because we must have  , word
, word  contains at least one
contains at least one  . Then
. Then  for
for  will contain a different number of
will contain a different number of  's and
's and  's, therefore
's, therefore  for any
for any  . This is a contradiction with the third assertion of the lemma, this is why that assumption that
. This is a contradiction with the third assertion of the lemma, this is why that assumption that  is regular, is false. Therefore
is regular, is false. Therefore  .
.
Because the context-free grammar  generates language
generates language  , we have
, we have  . From these two follow that
. From these two follow that  .
.
Example 1.18 We show that  is not regular. (
is not regular. ( is the number of 0's in
is the number of 0's in  , while
, while  the number of 1's).
the number of 1's).
We proceed as in the previous example using here word  , where
, where  is the natural number associated by lemma to language
is the natural number associated by lemma to language  .
.
Example 1.19 We prove, using the pumping lemma, that  is not a regular language. Let
is not a regular language. Let  be, where
be, where  here is also the natural number associated to
here is also the natural number associated to  by the pumping lemma. From
by the pumping lemma. From  we have that
we have that  contains no other letters than
contains no other letters than  , but it contains at least one. By lemma we have
, but it contains at least one. By lemma we have  , that is not possible. Therefore
, that is not possible. Therefore  is not regular.
is not regular.
Pumping lemma has several interesting consequences.
Corollary 1.16 Regular language  is not empty if and only if there exists a word
is not empty if and only if there exists a word  ,
,  , where
, where  is the natural number associated to
is the natural number associated to  by the pumping lemma.
by the pumping lemma.
Proof. The assertion in a direction is obvious: if there exists a word shorter than  in
in  , then
, then  . Conversely, let
. Conversely, let  and let
and let  be the shortest word in
be the shortest word in  . We show that
. We show that  . If
. If  , then we apply the pumping lemma, and give the decomposition
, then we apply the pumping lemma, and give the decomposition  ,
,  and
and  . This is a contradiction, because
. This is a contradiction, because  and
and  is the shortest word in
is the shortest word in  . Therefore
. Therefore  .
.
Corollary 1.17 There exists an algorithm that can decide if a regular language is or not empty.
Proof. Assume that  , where
, where  is a DFA. By Consequence 1.16 and Theorem 1.15 language
is a DFA. By Consequence 1.16 and Theorem 1.15 language  is not empty if and only if it contains a word shorter than
is not empty if and only if it contains a word shorter than  , where
, where  is the number of states of automaton
is the number of states of automaton  . By this it is enough to decide that there is a word shorter than
. By this it is enough to decide that there is a word shorter than  which is accepted by automaton
which is accepted by automaton  . Because the number of words shorter than
. Because the number of words shorter than  is finite, the problem can be decided.
is finite, the problem can be decided.
When we had given an algorithm for inaccessible states of a DFA, we remarked that the procedure can be used also to decide if the language accepted by that automaton is or not empty. Because finite automata accept regular languages, we can consider to have already two procedures to decide if a regular languages is or not empty. Moreover, we have a third procedure, if we take into account that the algorithm for finding productive states also can be used to decide on a regular language when it is empty.
Corollary 1.18 A regular language  is infinite if and only if there exists a word
is infinite if and only if there exists a word  such that
such that  , where
, where  is the natural number associated to language
is the natural number associated to language  , given by the pumping lemma.
, given by the pumping lemma.
Proof. If  is infinite, then it contains words longer than
is infinite, then it contains words longer than  , and let
, and let  be the shortest word longer than
be the shortest word longer than  in
in  . Because
. Because  is regular we can use the pumping lemma, so
is regular we can use the pumping lemma, so  , where
, where  , thus
, thus  is also true. By the lemma
is also true. By the lemma  . But because
. But because  and the shortest word in
and the shortest word in  longer than
longer than  is
is  , we get
, we get  . From
. From  we get also
we get also  .
.
Conversely, if there exists a word  such that
such that  , then using the pumping lemma, we obtain that
, then using the pumping lemma, we obtain that  ,
,  and
and  for any
for any  , therefore
, therefore  is infinite.
is infinite.
Now, the question is: how can we apply the pumping lemma for a
finite regular language, since by pumping words we get an infinite
number of words? The number of states of a DFA accepting language  is greater than the length of the longest word in
is greater than the length of the longest word in  . So, in
. So, in  there is no word with length at least
there is no word with length at least  , when
, when  is the natural number associated to
is the natural number associated to  by the pumping lemma. Therefore, no word in
by the pumping lemma. Therefore, no word in  can be decomposed in the form
can be decomposed in the form  , where
, where  ,
,  ,
,  , and this is why we can not obtain an infinite number of words in
, and this is why we can not obtain an infinite number of words in  .
.
In this subsection we introduce for any alphabet  the notion of regular expressions over
the notion of regular expressions over  and the corresponding representing languages. A regular expression is a
formula, and the corresponding language is a language over
and the corresponding representing languages. A regular expression is a
formula, and the corresponding language is a language over  . For example, if
. For example, if  , then
, then  ,
,  ,
,  are regular expressions over
are regular expressions over  which represent respectively languages
which represent respectively languages  ,
,  ,
,  . The exact definition is the following.
. The exact definition is the following.
Definition 1.19 Define recursively a regular expression over  and the language it represent.
and the language it represent.

 is a regular expression representing the empty language.
is a regular expression representing the empty language.

 is a regular expression representing language
is a regular expression representing language  .
.
 If
If  , then
, then  is a regular expression representing language
is a regular expression representing language  .
.
 If
If  ,
,  are regular expressions representing languages
are regular expressions representing languages  and
and  respectively, then
respectively, then  ,
,  ,
,  are regular expressions representing languages
are regular expressions representing languages  ,
,  and
and  respectively.
respectively.
Regular expression over  can be obtained only by using the above rules a finite number of times.
can be obtained only by using the above rules a finite number of times.
Some brackets can be omitted in the regular expressions if taking
into account the priority of operations (iteration, product, union) the
corresponding languages are not affected. For example instead of  we can consider
we can consider  .
.
Two regular expressions are equivalent if they represent the same language, that is  if
if  , where
, where  and
and  are the languages represented by regular expressions
are the languages represented by regular expressions  and
and  respectively. Figure 1.18 shows some equivalent expressions.
respectively. Figure 1.18 shows some equivalent expressions.
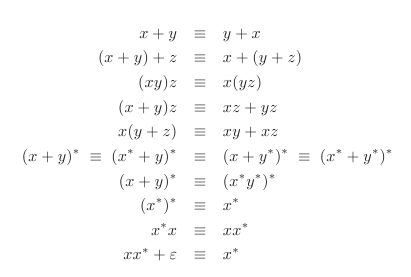
We show that to any finite language  can be associated a regular expression
can be associated a regular expression  which represent language
which represent language  . If
. If  , then
, then  . If
. If  , then
, then  , where for any
, where for any  expression
expression  is a regular expression representing language
is a regular expression representing language  . This latter can be done by the following rule. If
. This latter can be done by the following rule. If  , then
, then  , else if
, else if  , where
, where  depends on
depends on  , then
, then  ,
where the brackets are omitted. We prove the theorem of Kleene which
refers to the relationship between regular languages and regular
expression.
,
where the brackets are omitted. We prove the theorem of Kleene which
refers to the relationship between regular languages and regular
expression.
Theorem 1.20 (Kleene's theorem) Language  is regular if and only if there exists a regular expression over
is regular if and only if there exists a regular expression over  representing language
representing language  .
.
Proof. First we prove that if  is a regular expression, then language
is a regular expression, then language  which represents
which represents  is also regular. The proof will be done by induction on the construction of expression.
is also regular. The proof will be done by induction on the construction of expression.
If  ,
,  ,
,  , then
, then  ,
,  ,
,  respectively. Since
respectively. Since  is finite in all three cases, it is also regular.
is finite in all three cases, it is also regular.
If  , then
, then  , where
, where  and
and  are the languages which represent the regular expressions
are the languages which represent the regular expressions  and
and  respectively. By the induction hypothesis languages
respectively. By the induction hypothesis languages  and
and  are regular, so
are regular, so  is also regular because regular languages are closed on union. Cases
is also regular because regular languages are closed on union. Cases  and
and  can be proved by similar way.
can be proved by similar way.
Conversely, we prove that if  is a regular language, then a regular expression
is a regular language, then a regular expression  can be associated to it, which represent exactly the language
can be associated to it, which represent exactly the language  . If
. If  is regular, then there exists a DFA
is regular, then there exists a DFA  for which
for which  . Let
. Let  the states of the automaton
the states of the automaton  . Define languages
. Define languages  for all
for all  and
and  .
.  is the set of words, for which automaton
is the set of words, for which automaton  goes from state
goes from state  to state
to state  without using any state with index greater than
without using any state with index greater than  . Using transition graph we can say: a word is in
. Using transition graph we can say: a word is in  , if from state
, if from state  we arrive to state
we arrive to state  following the edges of the graph, and concatenating the corresponding
labels on edges we get exactly that word, not using any state
following the edges of the graph, and concatenating the corresponding
labels on edges we get exactly that word, not using any state  . Sets
. Sets  can be done also formally:
can be done also formally:
 , if
, if  ,
,
 ,
,
 for all
for all  .
.
We can prove by induction that sets  can be described by regular expressions. Indeed, if
can be described by regular expressions. Indeed, if  , then for all
, then for all  and
and  languages
languages  are finite, so they can be expressed by regular expressions representing exactly these languages. Moreover, if for all
are finite, so they can be expressed by regular expressions representing exactly these languages. Moreover, if for all  and
and  language
language  can be expressed by regular expression, then language
can be expressed by regular expression, then language  can be expressed also by regular expression, which can be corresponding
constructed from regular expressions representing languages
can be expressed also by regular expression, which can be corresponding
constructed from regular expressions representing languages  ,
,  ,
,  and
and  respectively, using the above formula for
respectively, using the above formula for  .
.
Finally, if  is the set of final states of the DFA
is the set of final states of the DFA  , then
, then  can be expressed by a regular expression obtained from expressions representing languages
can be expressed by a regular expression obtained from expressions representing languages  using operation
using operation  .
.
Further on we give some procedures which associate DFA to regular expressions and conversely regular expression to DFA.
We present here three methods, each of which associate to a DFA the corresponding regular expression.
Method 1. Using the result of the theorem of Kleene, we will construct the sets  , and write a regular expression which represents the language
, and write a regular expression which represents the language  , where
, where  is the set of final states of the automaton.
is the set of final states of the automaton.
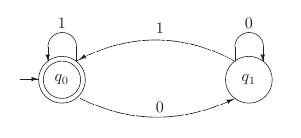
Figure 1.20. DFA in Example 1.21 to which a regular expression is associated by Method 1. The computation are in Figure 1.21.
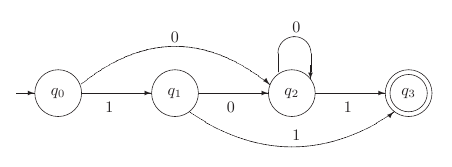 |
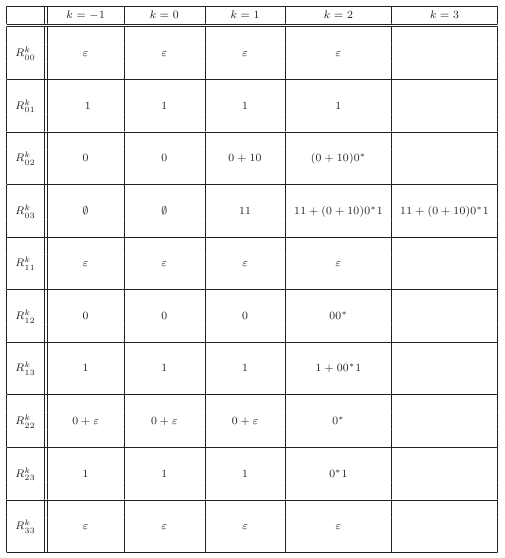
Example 1.20 Consider the DFA in Fig. 1.19.





Then the regular expression corresponding to  is
is  .
.
Example 1.21 Find a regular expression associated to DFA in Fig. 1.20. The computations are in Figure 1.21. The regular expression corresponding to  is
is  .
.
Method 2. Now we generalize the notion of finite automaton, considering words instead of letters as labels of edges. In such an automaton each walk determine a regular expression, which determine a regular language. The regular language accepted by a generalized finite automaton is the union of regular languages determined by the productive walks. It is easy to see that the generalized finite automata accept regular languages.
The advantage of generalized finite automata is that the number of its edges can be diminuted by equivalent transformations, which do not change the accepted language, and leads to a graph with only one edge which label is exactly the accepted language. The possible equivalent transformations can be seen in Fig. 1.22. If some of the vertices 1, 2, 4, 5 on the figure coincide, in the result they are merged, and a loop will arrive.
First, the automaton is transformed by corresponding  -moves
to have only one initial and one final state. Then, applying the
equivalent transformations until the graph will have only one edge, we
will obtain as the label of this edge the regular expression associated
to the automaton.
-moves
to have only one initial and one final state. Then, applying the
equivalent transformations until the graph will have only one edge, we
will obtain as the label of this edge the regular expression associated
to the automaton.
Figure 1.22. Possible equivalent transformations for finding regular expression associated to an automaton.
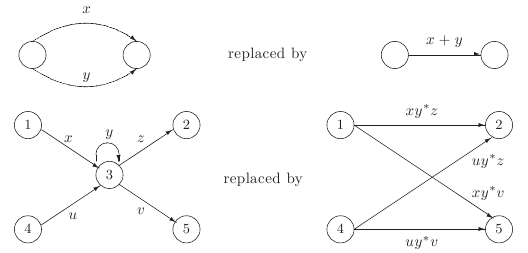
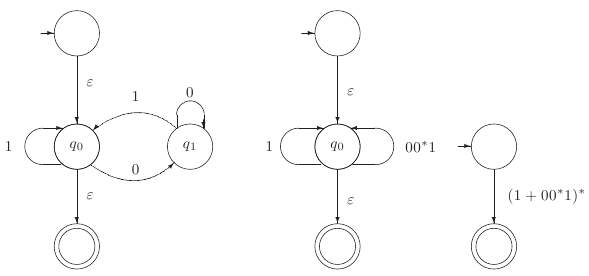
Example 1.22 In the case of Fig. 1.19 the result is obtained by steps illustrated in Fig. 1.23. This result is  , which represents the same language as obtained by Method 1 (See example 1.20).
, which represents the same language as obtained by Method 1 (See example 1.20).
Example 1.23 In the case of Fig. 1.20 is not necessary to introduce new initial and final state. The steps of transformations can be seen in Fig. 1.23. The resulted regular expression can be written also as  , which is the same as obtained by the previous method.
, which is the same as obtained by the previous method.
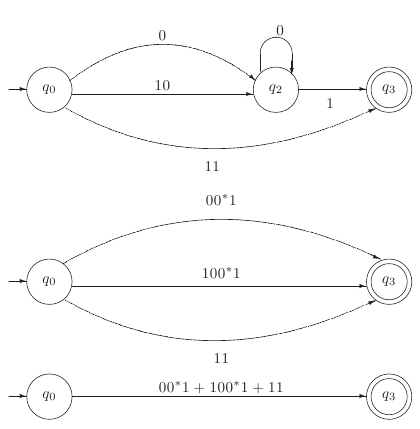
Method 3. The third method for writing regular expressions associated to finite automata uses formal equations. A variable  is associated to each state of the automaton (to different states
different variables). Associate to each state an equation which left
side contains
is associated to each state of the automaton (to different states
different variables). Associate to each state an equation which left
side contains  , its right side contains sum of terms of form
, its right side contains sum of terms of form  or
or  , where
, where  is a variable associated to a state, and
is a variable associated to a state, and  is its corresponding input symbol. If there is no incoming edge in the state corresponding to
is its corresponding input symbol. If there is no incoming edge in the state corresponding to  then the right side of the equation with left side
then the right side of the equation with left side  contains
contains  , otherwise is the sum of all terms of the form
, otherwise is the sum of all terms of the form  for which there is a transition labelled with letter
for which there is a transition labelled with letter  from state corresponding to
from state corresponding to  to the state corresponding to
to the state corresponding to  . If the state corresponding to
. If the state corresponding to  is also an initial and a final state, then on right side of the equation with the left side
is also an initial and a final state, then on right side of the equation with the left side  will be also a term equal to
will be also a term equal to  . For example in the case of Fig. 1.20 let these variable
. For example in the case of Fig. 1.20 let these variable  corresponding to the states
corresponding to the states  . The corresponding equation are
. The corresponding equation are



 .
.
If an equation is of the form  , where
, where  are arbitrary words not containing
are arbitrary words not containing  , then it is easy to see by a simple substitution that
, then it is easy to see by a simple substitution that  is a solution of the equation.
is a solution of the equation.
Because these equations are linear, all of them can be written in the form  or
or  , where
, where  do not contain any variable. Substituting this in the other equations
the number of remaining equations will be diminuted by one. In such a
way the system of equation can be solved for each variable.
do not contain any variable. Substituting this in the other equations
the number of remaining equations will be diminuted by one. In such a
way the system of equation can be solved for each variable.
The solution will be given by variables corresponding to final states summing the corresponding regular expressions.
In our example from the first equation we get  . From here
. From here  , or
, or  , and solving this we get
, and solving this we get  . Variable
. Variable  can be obtained immediately and we obtain
can be obtained immediately and we obtain  .
.
Using this method in the case of Fig. 1.19, the following equations will be obtained


Therefore

 .
.
Adding the two equations we will obtain
 , from where (considering
, from where (considering  as
as  and
and  as
as  ) we get the result
) we get the result
 .
.
From here the value of  after the substitution is
after the substitution is
 ,
,
which is equivalent to the expression obtained using the other methods.
Associate to the regular expression  a generalized finite automaton:
a generalized finite automaton:
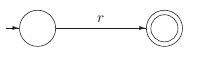
After this, use the transformations in Fig. 1.25 step by step, until an automaton with labels equal to letters from  or
or  will be obtained.
will be obtained.
Example 1.24 Get started from regular expression  . The steps of transformations are in Fig. 1.26(a)-(e). The last finite automaton (see Fig. 1.26(e)) can be done in a simpler form as can be seen in Fig. 1.26(f). After eliminating the
. The steps of transformations are in Fig. 1.26(a)-(e). The last finite automaton (see Fig. 1.26(e)) can be done in a simpler form as can be seen in Fig. 1.26(f). After eliminating the  -moves and transforming in a deterministic finite automaton the DFA in Fig. 1.27 will be obtained, which is equivalent to DFA in Fig. 1.19.
-moves and transforming in a deterministic finite automaton the DFA in Fig. 1.27 will be obtained, which is equivalent to DFA in Fig. 1.19.
Figure 1.25. Possible transformations to obtain finite automaton associated to a regular expression.
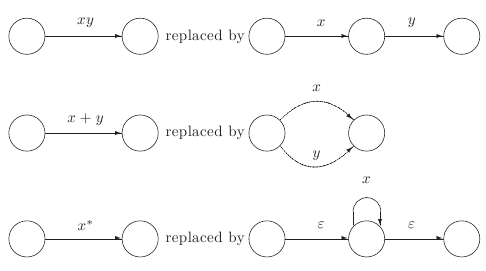
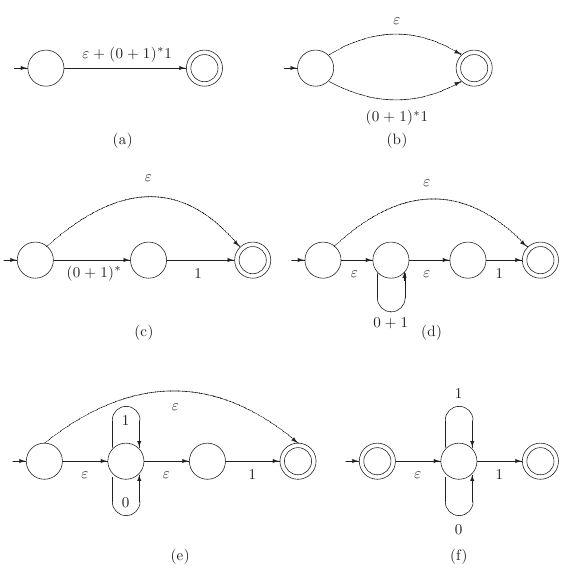
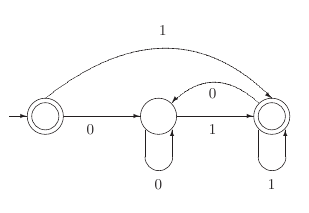
Exercises
1.2-1 Give a DFA which accepts natural numbers divisible by 9.
1.2-2 Give a DFA which accepts the language containing all words formed by
a. an even number of 0's and an even number of 1's,
b. an even number of 0's and an odd number of 1's,
c. an odd number of 0's and an even number of 1's,
d. an odd number of 0's and an odd number of 1's.
1.2-3 Give a DFA to accept respectively the following languages:

 .
.
1.2-4 Give an NFA which accepts words containing at least two 0's and any number of 1's. Give an equivalent DFA.
1.2-5 Minimize the DFA's in Fig. 1.28.
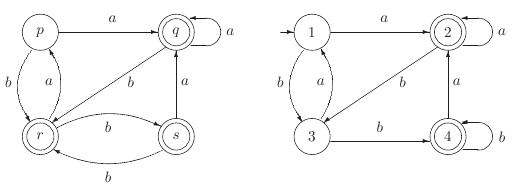
1.2-6 Show that the DFA in 1.29.(a) is a minimum state automaton.
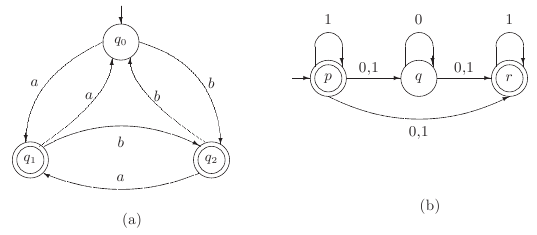
1.2-7 Transform NFA in Fig. 1.29.(b) in a DFA, and after this minimize it.
1.2-8 Define finite automaton  which accepts all words of the form
which accepts all words of the form  (
( ), and finite automaton
), and finite automaton  which accepts all words of the form
which accepts all words of the form  (
( ). Define the union automaton
). Define the union automaton  , and then eliminate the
, and then eliminate the  -moves.
-moves.
1.2-9 Associate to DFA in Fig. 1.30 a regular expression.
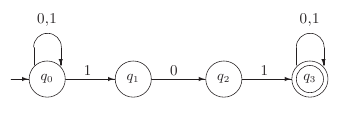
1.2-10 Associate to regular expression  a DFA.
a DFA.
1.2-11 Prove, using the pumping lemma, that none of the following languages are regular:
 .
.
1.2-12 Prove that if  is a regular language, then
is a regular language, then  is also regular.
is also regular.
1.2-13 Prove that if  is a regular language, then the following languages are also regular.
is a regular language, then the following languages are also regular.
 .
.
1.2-14 Show that the following languages are all regular.
 ,
,
 ,
,
 .
.
In this section we deal with the pushdown automata and the class of languages — the context-free languages — accepted by them.
As we have been seen in Section 1.1, a context-free grammar  is one with the productions of the form
is one with the productions of the form  ,
,  ,
,  . The production
. The production  is also permitted if
is also permitted if  does not appear in right hand side of any productions. Language
does not appear in right hand side of any productions. Language  is the context-free language generated by grammar
is the context-free language generated by grammar  .
.
We have been seen that finite automata accept the class of regular languages. Now we get to know a new kind of automata, the so-called pushdown automata, which accept context-free languages. The pushdown automata differ from finite automata mainly in that to have the possibility to change states without reading any input symbol (i.e. to read the empty symbol) and possess a stack memory, which uses the so-called stack symbols (See Fig. 1.31).
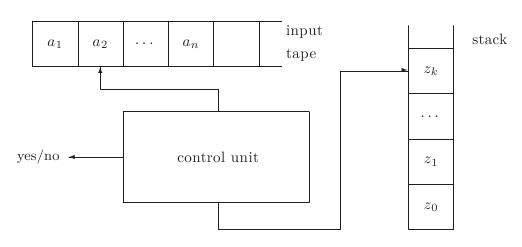
The
pushdown automaton get a word as input, start to function from an
initial state having in the stack a special symbol, the initial stack
symbol. While working, the pushdown automaton change its state based on
current state, next input symbol (or empty word) and stack top symbol
and replace the top symbol in the stack with a (possibly empty) word.
There are two type of acceptances. The pushdown automaton accepts a word by final state when after reading it the automaton enter a final state. The pushdown automaton accepts a word by empty stack when after reading it the automaton empties its stack. We show that these two acceptances are equivalent.
Definition 1.21 A nondeterministic pushdown automaton is a system

where

 is the finite, non-empty set of states
is the finite, non-empty set of states

 is the input alphabet,
is the input alphabet,

 is the stack alphabet,
is the stack alphabet,

 is the set of transitions or edges,
is the set of transitions or edges,

 is the initial state,
is the initial state,

 is the start symbol of stack,
is the start symbol of stack,

 is the set of final states.
is the set of final states.
A transition  means that if pushdown automaton
means that if pushdown automaton  is in state
is in state  , reads from the input tape letter
, reads from the input tape letter  (instead of input letter we can also consider the empty word
(instead of input letter we can also consider the empty word  ), and the top symbol in the stack is
), and the top symbol in the stack is  , then the pushdown automaton enters state
, then the pushdown automaton enters state  and replaces in the stack
and replaces in the stack  by word
by word  . Writing word
. Writing word  in the stack is made by natural order (letters of word
in the stack is made by natural order (letters of word  will be put in the stack letter by letter from left to right). Instead of writing transition
will be put in the stack letter by letter from left to right). Instead of writing transition  we will use a more suggestive notation
we will use a more suggestive notation  .
.
Here, as in the case of finite automata, we can define a transition function

which associate to current state, input letter and top letter in stack pairs of the form  , where
, where  is the word written in stack and
is the word written in stack and  the new state.
the new state.
Because the pushdown automaton is nondeterministic, we will have for the transition function
 (if the pushdown automaton reads an input letter and moves to right), or
(if the pushdown automaton reads an input letter and moves to right), or
 (without move on the input tape).
(without move on the input tape).
A pushdown automaton is deterministic, if for any  and
and  we have
we have

 ,
,  and
and
 if
if  , then
, then  ,
,  .
.
We can associate to any pushdown automaton a transition table,
exactly as in the case of finite automata. The rows of this table are
indexed by elements of  , the columns by elements from
, the columns by elements from  and
and  (to each
(to each  and
and  will correspond a column). At intersection of row corresponding to state
will correspond a column). At intersection of row corresponding to state  and column corresponding to
and column corresponding to  and
and  we will have pairs
we will have pairs  if
if  . The transition graph, in which the label of edge
. The transition graph, in which the label of edge  will be
will be  corresponding to transition
corresponding to transition  , can be also defined.
, can be also defined.
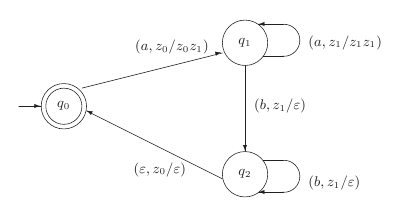
Example 1.25  . Elements of
. Elements of  are:
are:

The transition function:

The transition table:
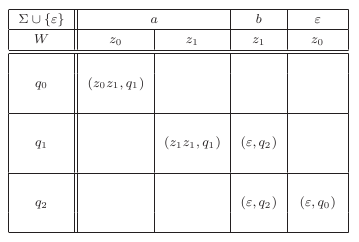
Because for the transition function every set which is not empty contains only one element (e.g.  ),
in the above table each cell contains only one element, and the set
notation is not used. Generally, if a set has more than one element,
then its elements are written one under other. The transition graph of
this pushdown automaton is in Fig. 1.32.
),
in the above table each cell contains only one element, and the set
notation is not used. Generally, if a set has more than one element,
then its elements are written one under other. The transition graph of
this pushdown automaton is in Fig. 1.32.
The current state, the unread part of the input word and the content of stack constitutes a configuration of the pushdown automaton, i.e. for each  ,
,  and
and  the triplet
the triplet  can be a configuration. If
can be a configuration. If  and
and  , then the pushdown automaton can change its configuration in two ways:
, then the pushdown automaton can change its configuration in two ways:

 ,
,
if 

 ,
,
if  .
.
The reflexive and transitive closure of the relation  will be denoted by
will be denoted by  . Instead of using
. Instead of using  , sometimes
, sometimes  is considered.
is considered.
How does work such a pushdown automaton? Getting started with the initial configuration  we will consider all possible next configurations, and after this the
next configurations to these next configurations, and so on, until it
is possible.
we will consider all possible next configurations, and after this the
next configurations to these next configurations, and so on, until it
is possible.
Definition 1.22 Pushdown automaton  accepts (recognizes) word
accepts (recognizes) word  by final state if there exist a sequence of configurations of
by final state if there exist a sequence of configurations of  for which the following are true:
for which the following are true:
 the first element of the sequence is
the first element of the sequence is  ,
,
 there is a going from each element of the sequence to the next element,
excepting the case when the sequence has only one element,
there is a going from each element of the sequence to the next element,
excepting the case when the sequence has only one element,
 the last element of the sequence is
the last element of the sequence is  , where
, where  and
and  .
.
Therefore pushdown automaton  accepts word
accepts word  by final state, if and only if
by final state, if and only if  for some
for some  and
and  . The set of words accepted by final state by pushdown automaton
. The set of words accepted by final state by pushdown automaton  will be called the language accepted by
will be called the language accepted by  by final state and will be denoted by
by final state and will be denoted by  .
.
Definition 1.23 Pushdown automaton  accepts (recognizes) word
accepts (recognizes) word  by empty stack if there exist a sequence of configurations of
by empty stack if there exist a sequence of configurations of  for which the following are true:
for which the following are true:
 the first element of the sequence is
the first element of the sequence is  ,
,
 there is a going from each element of the sequence to the next element,
there is a going from each element of the sequence to the next element,
 the last element of the sequence is
the last element of the sequence is  and
and  is an arbitrary state.
is an arbitrary state.
Therefore pushdown automaton  accepts a word
accepts a word  by empty stack if
by empty stack if  for some
for some  . The set of words accepted by empty stack by pushdown automaton
. The set of words accepted by empty stack by pushdown automaton  will be called the language accepted by empty stack by
will be called the language accepted by empty stack by  and will be denoted by
and will be denoted by  .
.
Example 1.26 Pushdown automaton  of Example 1.25 accepts the language
of Example 1.25 accepts the language  by final state. Consider the derivation for words
by final state. Consider the derivation for words  and
and  .
.
Word  is accepted by the considered pushdown automaton because
is accepted by the considered pushdown automaton because

 and because
and because  is a final state the pushdown automaton accepts this word. But the stack being empty, it accepts this word also by empty stack.
is a final state the pushdown automaton accepts this word. But the stack being empty, it accepts this word also by empty stack.
Because the initial state is also a final state, the empty word is accepted by final state, but not by empty stack.
To show that word  is not accepted, we need to study all possibilities. It is easy to see that in our case there is only a single possibility:
is not accepted, we need to study all possibilities. It is easy to see that in our case there is only a single possibility:
 , but there is no further going, so word
, but there is no further going, so word  is not accepted.
is not accepted.
Example 1.27 The transition table of the pushdown automaton  is:
is:
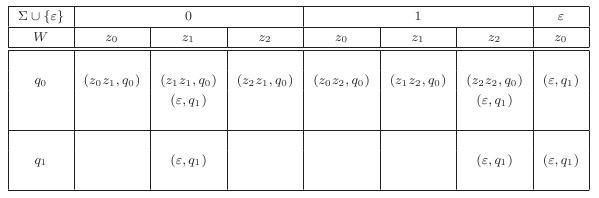
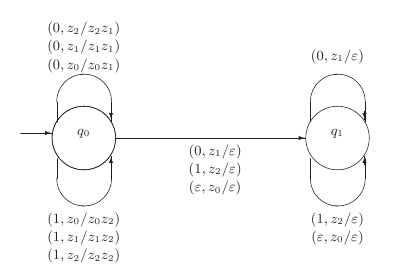
The corresponding transition graph can be seen in Fig. 1.33. Pushdown automaton  accepts the language
accepts the language  . Because
. Because  is nemdeterministic, all the configurations obtained from the initial configuration
is nemdeterministic, all the configurations obtained from the initial configuration  can be illustrated by a computation tree. For example the computation tree associated to the initial configuration
can be illustrated by a computation tree. For example the computation tree associated to the initial configuration  can be seen in Fig. 1.34. From this computation tree we can observe that, because
can be seen in Fig. 1.34. From this computation tree we can observe that, because  is a leaf of the tree, pushdown automaton
is a leaf of the tree, pushdown automaton  accepts word 1001 by empty stack. The computation tree in Fig. 1.35 shows that pushdown automaton
accepts word 1001 by empty stack. The computation tree in Fig. 1.35 shows that pushdown automaton  does not accept word
does not accept word  , because the configurations in leaves can not be continued and none of them has the form
, because the configurations in leaves can not be continued and none of them has the form  .
.
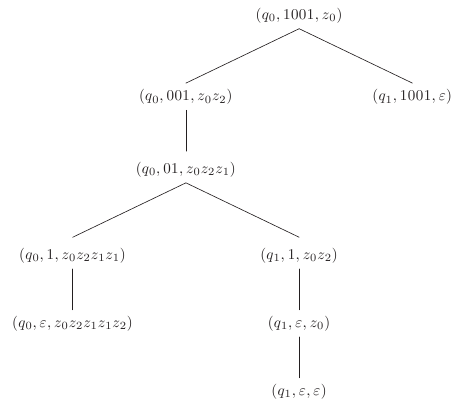
Figure 1.35. Computation tree to show that the pushdown automaton in Example 1.27 does not accept word .
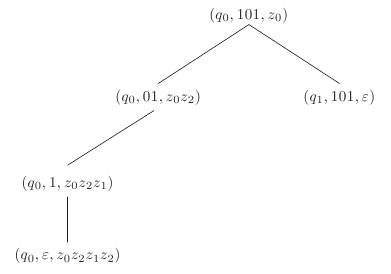
Theorem 1.24 A language  is accepted by a nondeterministic pushdown automaton
is accepted by a nondeterministic pushdown automaton  by empty stack if and only if it can be accepted by a nondeterministic pushdown automaton
by empty stack if and only if it can be accepted by a nondeterministic pushdown automaton  by final state.
by final state.

be the pushdown automaton which accepts by empty stack language  . Define pushdown automaton
. Define pushdown automaton  , where
, where  and
and
 .
.
Working of  : Pushdown automaton
: Pushdown automaton  with an
with an  -move first goes in the initial state of
-move first goes in the initial state of  , writing
, writing  (the initial stack symbol of
(the initial stack symbol of  ) in the stack (beside
) in the stack (beside  ). After this it is working as
). After this it is working as  . If
. If  for a given word empties its stack, then
for a given word empties its stack, then  still has
still has  in the stack, which can be deleted by
in the stack, which can be deleted by  using an
using an  -move, while a final state will be reached.
-move, while a final state will be reached.  can reach a final state only if
can reach a final state only if  has emptied the stack.
has emptied the stack.
b) Let  be a pushdown automaton, which accepts language
be a pushdown automaton, which accepts language  by final state. Define pushdown automaton
by final state. Define pushdown automaton  , where
, where  ,
,  and
and
 .
.

Working  : Pushdown automaton
: Pushdown automaton  with an
with an  -move writes in the stack beside
-move writes in the stack beside  the initial stack symbol
the initial stack symbol  of
of  , then works as
, then works as  , i.e reaches a final state for each accepted word. After this
, i.e reaches a final state for each accepted word. After this  empties the stack by an
empties the stack by an  -move.
-move.  can empty the stack only if
can empty the stack only if  goes in a final state.
goes in a final state.
The next two theorems prove that the class of languages accepted by nondeterministic pushdown automata is just the set of context-free languages.
Theorem 1.25 If  is a context-free grammar, then there exists such a nondeterministic pushdown automaton
is a context-free grammar, then there exists such a nondeterministic pushdown automaton  which accepts
which accepts  by empty stack, i.e.
by empty stack, i.e.  .
.
We outline the proof only. Let  be a context-free grammar. Define pushdown automaton
be a context-free grammar. Define pushdown automaton  , where
, where  , and the set
, and the set  of transitions is:
of transitions is:
 If there is in the set of productions of
If there is in the set of productions of  a production of type
a production of type  , then let put in
, then let put in  the transition
the transition  ,
,
 For any letter
For any letter  let put in
let put in  the transition
the transition  . If there is a production
. If there is a production  in
in  , the pushdown automaton put in the stack the mirror of
, the pushdown automaton put in the stack the mirror of  with an
with an  -move.
If the input letter coincides with that in the top of the stack, then
the automaton deletes it from the stack. If in the top of the stack
there is a nonterminal
-move.
If the input letter coincides with that in the top of the stack, then
the automaton deletes it from the stack. If in the top of the stack
there is a nonterminal  , then the mirror of right-hand side of a production which has
, then the mirror of right-hand side of a production which has  in its left-hand side will be put in the stack. If after reading all
letters of the input word, the stack will be empty, then the pushdown
automaton recognized the input word.
in its left-hand side will be put in the stack. If after reading all
letters of the input word, the stack will be empty, then the pushdown
automaton recognized the input word.
The following algorithm builds for a context-free grammar  the pushdown automaton
the pushdown automaton  , which accepts by empty stack the language generated by
, which accepts by empty stack the language generated by  .
.
From-Cfg-to-Pushdown-Automaton(
)
1FORall production
DOput inthe transition
2
FORall terminal
DOput inthe transition
3
RETURN
If  has
has  productions and
productions and  terminals, then the number of step of the algorithm is
terminals, then the number of step of the algorithm is  .
.
Example 1.28 Let  . Then
. Then  , with the following transition table.
, with the following transition table.
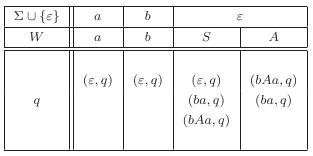
Let us see how pushdown automaton  accepts word
accepts word  , which in grammar
, which in grammar  can be derived in the following way:
can be derived in the following way:

where productions  and
and  were used. Word is accepted by empty stack (see Fig. 1.36).
were used. Word is accepted by empty stack (see Fig. 1.36).
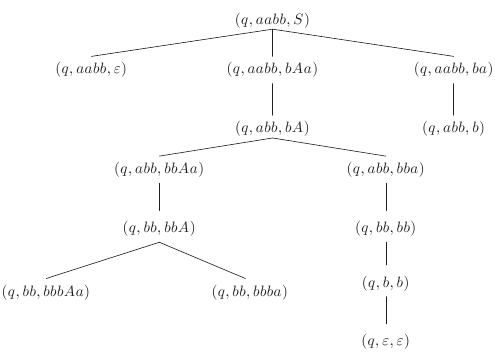
Theorem 1.26 For a nondeterministic pushdown automaton  there exists always a context-free grammar
there exists always a context-free grammar  such that
such that  accepts language
accepts language  by empty stack, i.e.
by empty stack, i.e.  .
.
Instead of a proof we will give a method to obtain grammar  . Let
. Let  be the nondeterministic pushdown automaton in question.
be the nondeterministic pushdown automaton in question.
Then  , where
, where
 and
and  .
.
Productions in  will be obtained as follows.
will be obtained as follows.
 For all state
For all state  put in
put in  production
production  .
.
 If
If  , where
, where  ,
,  (
( ) and
) and  , put in
, put in  for all possible states
for all possible states  productions
productions
 .
.
 If
If  , where
, where  , and
, and  , put in
, put in  production
production
 .
.
The context-free grammar defined by this is an extended one, to
which an equivalent context-free language can be associated. The proof
of the theorem is based on the fact that to every sequence of
configurations, by which the pushdown automaton  accepts a word, we can associate a derivation in grammar
accepts a word, we can associate a derivation in grammar  . This derivation generates just the word in question, because of productions of the form
. This derivation generates just the word in question, because of productions of the form  , which were defined for all possible states
, which were defined for all possible states  . In Example 1.27
we show how can be associated a derivation to a sequence of
configurations. The pushdown automaton defined in the example
recognizes word 00 by the sequence of configurations
. In Example 1.27
we show how can be associated a derivation to a sequence of
configurations. The pushdown automaton defined in the example
recognizes word 00 by the sequence of configurations
 ,
,
which sequence is based on the transitions
 ,
,
 ,
,
 .
.
To these transitions, by the definition of grammar  , the following productions can be associated
, the following productions can be associated
(1)  for all states
for all states  ,
,
(2)  ,
,
(3)  .
.
Furthermore, for each state  productions
productions  were defined.
were defined.
By the existence of production  there exists the derivation
there exists the derivation  , where
, where  can be chosen arbitrarily. Let choose in above production (1) state
can be chosen arbitrarily. Let choose in above production (1) state  to be equal to
to be equal to  . Then there exists also the derivation
. Then there exists also the derivation
 ,
,
where  can be chosen arbitrarily. If
can be chosen arbitrarily. If  , then the derivation
, then the derivation

will result. Now let  equal to
equal to  , then
, then
 ,
,
which proves that word 00 can be derived used the above grammar.
The next algorithm builds for a pushdown automaton  a context-free grammar
a context-free grammar  , which generates the language accepted by pushdown automaton
, which generates the language accepted by pushdown automaton  by empty stack.
by empty stack.
From-Pushdown-Automaton-to-Cf-Grammar(
)
1FORall2
DOput inproduction
3
FORall

,
(
),
4
DOFORall states5
DOput inproductions
6
FORAll

,
7
DOput inproduction

If the automaton has  states and
states and  productions, then the above algorithm executes at most
productions, then the above algorithm executes at most  steps, so in worst case the number of steps is
steps, so in worst case the number of steps is  .
Finally, without proof, we mention that the class of languages accepted
by deterministic pushdown automata is a proper subset of the class of
languages accepted by nondeterministic pushdown automata. This points
to the fact that pushdown automata behave differently as finite
automata.
.
Finally, without proof, we mention that the class of languages accepted
by deterministic pushdown automata is a proper subset of the class of
languages accepted by nondeterministic pushdown automata. This points
to the fact that pushdown automata behave differently as finite
automata.
Example 1.29 As an example, consider pushdown automaton  from the Example 1.28:
from the Example 1.28:  . Grammar
. Grammar  is:
is:

where for all  instead of
instead of  we shortly used
we shortly used  . The transitions:
. The transitions:

Based on these, the following productions are defined:




 .
.
It is easy to see that  can be eliminated, and the productions will be:
can be eliminated, and the productions will be:
 ,
,
 ,
,
 ,
,  ,
,
and these productions can be replaced:
 ,
,
 .
.
Consider context-free grammar  . A derivation tree of
. A derivation tree of  is a finite, ordered, labelled tree, which root is labelled by the the start symbol
is a finite, ordered, labelled tree, which root is labelled by the the start symbol  ,
every interior vertex is labelled by a nonterminal and every leaf by a
terminal. If an interior vertex labelled by a nonterminal
,
every interior vertex is labelled by a nonterminal and every leaf by a
terminal. If an interior vertex labelled by a nonterminal  has
has  descendents, then in
descendents, then in  there exists a production
there exists a production  such that the descendents are labelled by letters
such that the descendents are labelled by letters  ,
,  ,
,  . The result of a derivation tree is a word over
. The result of a derivation tree is a word over  , which can be obtained by reading the labels of the leaves from left to right. Derivation tree is also called syntax tree.
, which can be obtained by reading the labels of the leaves from left to right. Derivation tree is also called syntax tree.
Consider the context-free grammar  . It generates language
. It generates language  . Derivation of word
. Derivation of word  is:
is:

In Fig. 1.37 this derivation can be seen, which result is  .
.
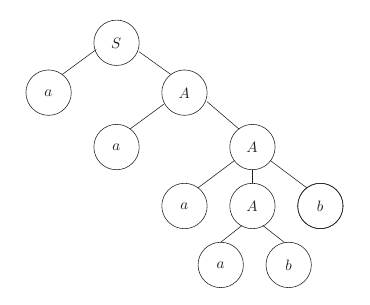
To
every derivation we can associate a syntax tree. Conversely, to any
syntax tree more than one derivation can be associated. For example to
syntax tree in Fig. 1.37 the derivation

also can be associated.
Definition 1.27 Derivation  is a leftmost derivation, if for all
is a leftmost derivation, if for all  there exist words
there exist words  ,
,  and productions
and productions  , for which we have
, for which we have

Consider grammar:
 .
.
In this grammar word  has two different leftmost derivations:
has two different leftmost derivations:
 ,
,
 .
.
Definition 1.28 A context-free grammar  is ambiguous if in
is ambiguous if in  there exists a word with more than one leftmost derivation. Otherwise
there exists a word with more than one leftmost derivation. Otherwise  is unambiguous.
is unambiguous.
The above grammar  is ambiguous, because word
is ambiguous, because word  has two different leftmost derivations. A language can be generated by
more than one grammar, and between them can exist ambiguous and
unambiguous too. A context-free language is inherently ambiguous, if there is no unambiguous grammar which generates it.
has two different leftmost derivations. A language can be generated by
more than one grammar, and between them can exist ambiguous and
unambiguous too. A context-free language is inherently ambiguous, if there is no unambiguous grammar which generates it.
Example 1.30 Examine the following two grammars.
Grammar  is ambiguous because
is ambiguous because

 and
and

 .
.
Grammar  is unambiguous.
is unambiguous.
Can be proved that  .
.
Like for regular languages there exists a pumping lemma also for context-free languages.
Theorem 1.29 (pumping lemma) For any context-free language  there exists a natural number
there exists a natural number  (which depends only on
(which depends only on  ), such that every word
), such that every word  of the language longer than
of the language longer than  can be written in the form
can be written in the form  and the following are true:
and the following are true:
(1)  ,
,
(2)  ,
,
(3)  ,
,
(4)  is also in
is also in  for all
for all  .
.
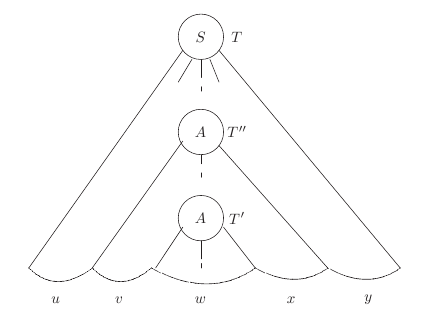
Proof. Let  be a grammar without unit productions, which generates language
be a grammar without unit productions, which generates language  . Let
. Let  be the number of nonterminals, and let
be the number of nonterminals, and let  be the maximum of lengths of right-hand sides of productions, i.e.
be the maximum of lengths of right-hand sides of productions, i.e.  . Let
. Let  and
and  , such that
, such that  . Then there exists a derivation tree
. Then there exists a derivation tree  with the result
with the result  . Let
. Let  be the height of
be the height of  (the maximum of path lengths from root to leaves). Because in
(the maximum of path lengths from root to leaves). Because in  all interior vertices have at most
all interior vertices have at most  descendents,
descendents,  has at most
has at most  leaves, i.e.
leaves, i.e.  . On the other hand, because of
. On the other hand, because of  , we get that
, we get that  . From this follows that in derivation tree
. From this follows that in derivation tree  there is a path from root to a leave in which there are more than
there is a path from root to a leave in which there are more than  vertices. Consider such a path. Because in
vertices. Consider such a path. Because in  the number of nonterminals is
the number of nonterminals is  and on this path vertices different from the leaf are labelled with
nonterminals, by the pigeonhole principle, it must be a nonterminal on
this path which occurs at least twice.
and on this path vertices different from the leaf are labelled with
nonterminals, by the pigeonhole principle, it must be a nonterminal on
this path which occurs at least twice.
Let us denote by  the nonterminal being the first on this path from root to the leaf which firstly repeat. Denote by
the nonterminal being the first on this path from root to the leaf which firstly repeat. Denote by  the subtree, which root is this occurrence of
the subtree, which root is this occurrence of  . Similarly, denote by
. Similarly, denote by  the subtree, which root is the second occurrence of
the subtree, which root is the second occurrence of  on this path. Let
on this path. Let  be the result of the tree
be the result of the tree  . Then the result of
. Then the result of  is in form
is in form  , while of
, while of  in
in  . Derivation tree
. Derivation tree  with this decomposition of
with this decomposition of  can be seen in Fig. 1.38. We show that this decomposition of
can be seen in Fig. 1.38. We show that this decomposition of  satisfies conditions (1)–(4) of lemma. Because in
satisfies conditions (1)–(4) of lemma. Because in  there are no
there are no  -productions (except maybe the case
-productions (except maybe the case  ), we have
), we have  .
Furthermore, because each interior vertex of the derivation tree has at
least two descendents (namely there are no unit productions), also the
root of
.
Furthermore, because each interior vertex of the derivation tree has at
least two descendents (namely there are no unit productions), also the
root of  has, hence
has, hence  . Because
. Because  is the first repeated nonterminal on this path, the height of
is the first repeated nonterminal on this path, the height of  is at most
is at most  , and from this
, and from this  results.
results.
After eliminating from  all vertices of
all vertices of  excepting the root, the result of obtained tree is
excepting the root, the result of obtained tree is  , i.e.
, i.e.  .
.
Similarly, after eliminating  we get
we get  , and finally because of the definition of
, and finally because of the definition of  we get
we get  Then
Then  . Therefore
. Therefore  and
and  for all
for all  . Therefore, for all
. Therefore, for all  we have
we have  , i.e. for all
, i.e. for all 
 .
.
Now we present two consequences of the lemma.
 .
.Proof. This
consequence states that there exists a context-sensitive language which
is not context-free. To prove this it is sufficient to find a
context-sensitive language for which the lemma is not true. Let this
language be  .
.
To show that this language is context-sensitive it is enough to give a convenient grammar. In Example 1.2 both grammars are extended context-sensitive, and we know that to each extended grammar of type  an equivalent grammar of the same type can be associated.
an equivalent grammar of the same type can be associated.
Let  be the natural number associated to
be the natural number associated to  by lemma, and consider the word
by lemma, and consider the word  . Because of
. Because of  , if
, if  is context-free
is context-free  can be decomposed in
can be decomposed in  such that conditions (1)–(4) are true. We show that this leads us to a contradiction.
such that conditions (1)–(4) are true. We show that this leads us to a contradiction.
Firstly, we will show that word  and
and  can contain only one type of letters. Indeed if either
can contain only one type of letters. Indeed if either  or
or  contain more than one type of letters, then in word
contain more than one type of letters, then in word  the order of the letters will be not the order
the order of the letters will be not the order  , so
, so  , which contradicts condition (4) of lemma.
, which contradicts condition (4) of lemma.
If both  and
and  contain at most one type of letters, then in word
contain at most one type of letters, then in word  the number of different letters will be not the same, so
the number of different letters will be not the same, so  . This also contradicts condition (4) in lemma. Therefore
. This also contradicts condition (4) in lemma. Therefore  is not context-free.
is not context-free.
Corollary 1.31 The class of context-free languages is not closed under the intersection.
Proof. We give two context-free languages which intersection is not context-free. Let  ,
,  and
and
 where
where  :
:
 ,
,
 ,
,
 ,
,
and  , where
, where  :
:
 ,
,
 ,
,
 .
.
Languages  and
and  are context-free. But
are context-free. But

is not context-free (see the proof of the Consequence 1.30).
In the case of arbitrary grammars the normal form was defined (see Section 1.1) as grammars with no terminals in the left-hand side of productions. The normal form in the case of the context-free languages will contains some restrictions on the right-hand sides of productions. Two normal forms (Chomsky and Greibach) will be discussed.
Definition 1.32 A context-free grammar  is in Chomsky normal form, if all productions have form
is in Chomsky normal form, if all productions have form  or
or  , where
, where  ,
,  .
.
Example 1.31 Grammar  is in Chomsky normal form and
is in Chomsky normal form and  .
.
To each  -free context-free language can be associated an equivalent grammar is Chomsky normal form. The next algorithm transforms an
-free context-free language can be associated an equivalent grammar is Chomsky normal form. The next algorithm transforms an  -free context-free grammar
-free context-free grammar  in grammar
in grammar  which is in Chomsky normal form.
which is in Chomsky normal form.
Chomsky-Normal-Form(
)
12 eliminate unit productions, and let
the new set of productions (see algorithm
ELIMINATE-UNIT-PRODUCTIONSin Section 1.1) 3 inreplace in each production with at least two letters in right-hand side all terminals
by a new nonterminal
, and add this nonterminal to
and add production
to
4 replace all productions
, where
and
, by the following:
,
,

,
, where
are new nonterminals, and add them to
5
RETURN
Example 1.32 Let  . It is easy to see that
. It is easy to see that  . Steps of transformation to Chomsky normal form are the following:
. Steps of transformation to Chomsky normal form are the following:
Step 1: 
Step 2: After eliminating the unit production  the productions are:
the productions are:
 ,
,
 .
.
Step 3: We introduce three new nonterminals because of the three terminals in productions. Let these be  . Then the production are:
. Then the production are:
 ,
,
 ,
,
 ,
,
 .
.
Step 4: Only one new nonterminal (let this  ) must be introduced because of a single production with three letters in the right-hand side. Therefore
) must be introduced because of a single production with three letters in the right-hand side. Therefore  , and the productions in
, and the productions in  are:
are:
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
All these productions are in required form.
Definition 1.33 A context-free grammar  is in Greibach normal form if all production are in the form
is in Greibach normal form if all production are in the form  , where
, where  ,
,  ,
,  .
.
Example 1.33 Grammar  is in Greibach normal form and
is in Greibach normal form and  .
.
To each  -free
context-free grammar an equivalent grammar in Greibach normal form can
be given. We give and algorithm which transforms a context-free grammar
-free
context-free grammar an equivalent grammar in Greibach normal form can
be given. We give and algorithm which transforms a context-free grammar
 in Chomsky normal form in a grammar
in Chomsky normal form in a grammar  in Greibach normal form.
in Greibach normal form.
First, we give an order of the nonterminals:  , where
, where  is the start symbol. The algorithm will use the notations
is the start symbol. The algorithm will use the notations  ,
,  .
.
Greibach-Normal-Form(
)
12
3
FOR
TO
Case
4
DOFOR
TO5
DOfor all productionsand
(where
has no
as first letter) in
productions
, delete from
productions
6
IFthere is a production
Case
7
THENput inthe new nonterminal
, for all productions
put in
productions
and
, delete from
production
, empty> for all production
(where
is not the first letter of
) put in
production
8
FOR
DOWNTO
Case
9
DOFOR
TO10
DOfor all productionsand
put in
production
and delete from
productions
, 11
FOR
TO
Case
12
DOFOR
TO13
DOfor all productionsand
put in
production
and delete from
productions
14
RETURN
The algorithm first transform productions of the form  such that
such that  or
or  , where this latter is in Greibach normal form. After this, introducing a new nonterminal, eliminate productions
, where this latter is in Greibach normal form. After this, introducing a new nonterminal, eliminate productions  , and using substitutions all production of the form
, and using substitutions all production of the form  and
and  will be transformed in Greibach normal form.
will be transformed in Greibach normal form.
Example 1.34 Transform productions in Chomsky normal form




in Greibach normal form.
Steps of the algorithm:
3–5: Production  must be transformed. For this production
must be transformed. For this production  is appropriate. Put
is appropriate. Put  in the set of productions and eliminate
in the set of productions and eliminate  .
.
The productions will be:




6–7: Elimination of production  will be made using productions:
will be made using productions:



Then, after steps 6–7. the productions will be:





8–10: We make substitutions in productions with  in left-hand side. The results is:
in left-hand side. The results is:

11–13: Similarly with productions with  in left-hand side:
in left-hand side:

After the elimination in steps 8–13 of productions in which substitutions were made, the following productions, which are now in Greibach normal form, result:






can be generated by grammar

First, will eliminate the single unit production, and after this we will give an equivalent grammar in Chomsky normal form, which will be transformed in Greibach normal form.
Productions after the elimination of production  :
:

 .
.
We introduce productions  , and replace terminals by the corresponding nonterminals:
, and replace terminals by the corresponding nonterminals:
 ,
,
 ,
,
 .
.
After introducing two new nonterminals ( ,
,  ):
):
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
This is now in Chomsky normal form. Replace the nonterminals to be letters  as in the algorithm. Then, after applying the replacements
as in the algorithm. Then, after applying the replacements
 replaced by
replaced by  ,
,  replaced by
replaced by  ,
,  replaced by
replaced by  ,
,  replaced by
replaced by  ,
,  replaced by
replaced by  ,
,  replaced by
replaced by  ,
,  replaced by
replaced by  ,
,
our grammar will have the productions:
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
In steps 3–5 of the algorithm the new productions will occur:
 then
then

 , then
, then
 .
.
Therefore
 ,
,
 ,
,

 ,
,
 .
.
Steps 6–7 will be skipped, because we have no left-recursive productions. In steps 8–10 after the appropriate substitutions we have:

 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Exercises
1.3-1 Give pushdown automata to accept the following languages:
 ,
,
 ,
,
 .
.
1.3-2 Give a context-free grammar to generate language  , and transform it in Chomsky and Greibach normal forms. Give a pushdown automaton which accepts
, and transform it in Chomsky and Greibach normal forms. Give a pushdown automaton which accepts  .
.
1.3-3 What languages are generated by the following context-free grammars?
 .
.
1.3-4 Give a context-free grammar to generate words with an equal number of letters  and
and  .
.
1.3-5 Prove, using the pumping lemma, that a language whose words contains an equal number of letters  ,
,  and
and  can not be context-free.
can not be context-free.
1.3-6 Let the grammar  , where
, where
 ,
,
 ,
,
 ,
,
Show that word if a then if a then c else c has two different leftmost derivations.
1.3-7 Prove that if  is context-free, then
is context-free, then  is also context-free.
is also context-free.
PROBLEMS |
1-1 Linear grammars
A grammar  which has productions only in the form
which has productions only in the form  or
or  , where
, where  , is called a linear grammar. If in a linear grammar all production are of the form
, is called a linear grammar. If in a linear grammar all production are of the form  or
or  , then it is called a left-linear grammar. Prove that the language generated by a left-linear grammar is regular.
, then it is called a left-linear grammar. Prove that the language generated by a left-linear grammar is regular.
1-2 Operator grammars
An  -free context-free grammar is called operator grammar if in the right-hand side of productions there are no two successive nonterminals. Show that, for all
-free context-free grammar is called operator grammar if in the right-hand side of productions there are no two successive nonterminals. Show that, for all  -free context-free grammar an equivalent operator grammar can be built.
-free context-free grammar an equivalent operator grammar can be built.
1-3 Complement of context-free languages
Prove that the class of context-free languages is not closed on complement.
CHAPTER NOTES |
In the definition of finite automata instead of transition function we have used the transition graph, which in many cases help us to give simpler proofs.
There exist a lot of classical books on automata and formal languages. We mention from these the following: two books of Aho and Ullman [5], [6] in 1972 and 1973, book of Gécseg and Peák [87] in 1972, two books of Salomaa [221], [222] in 1969 and 1973, a book of Hopcroft and Ullman [118] in 1979, a book of Harrison [108] in 1978, a book of Manna [174], which in 1981 was published also in Hungarian. We notice also a book of Sipser [242] in 1997 and a monograph of Rozenberg and Salomaa [220]. In a book of Lothaire (common name of French authors) [166] on combinatorics of words we can read on other types of automata. Paper of Giammarresi and Montalbano [89] generalise the notion of finite automata. A new monograph is of Hopcroft, Motwani and Ullman [117]. In German we recommend the textbook of Asteroth and Baier [14]. The concise description of the transformation in Greibach normal form is based on this book.
A practical introduction to formal languages is written by Webber [270].
Other books in English: [32], [40], [68], [142], [149], [159], [164], [165], [177], [185], [238], [240], [251], [252].
At the end of the next chapter on compilers another books on the subject are mentioned.
Table of Contents
When a programmer writes down a solution of her problems, she writes a program on a special programming language. These programming languages are very different from the proper languages of computers, from the machine languages. Therefore we have to produce the executable forms of programs created by the programmer. We need a software or hardware tool, that translates the source language program – written on a high level programming language – to the target language program, a lower level programming language, mostly to a machine code program.
There are two fundamental methods to execute a program written on higher level language. The first is using an interpreter. In this case, the generated machine code is not saved but executed immediately. The interpreter is considered as a special computer, whose machine code is the high level language. Essentially, when we use an interpreter, then we create a two-level machine; its lower level is the real computer, on which the higher level, the interpreter, is built. The higher level is usually realized by a computer program, but, for some programming languages, there are special hardware interpreter machines.
The second method is using a compiler program. The difference of this method from the first is that here the result of translation is not executed, but it is saved in an intermediate file called target program.
The target program may be executed later, and the result of the program is received only then. In this case, in contrast with interpreters, the times of translation and execution are distinguishable.
In the respect of translation, the two translational methods are identical, since the interpreter and the compiler both generate target programs. For this reason we speak about compilers only. We will deal the these translator programs, called compilers (Figure 2.1).

Our
task is to study the algorithms of compilers. This chapter will care
for the translators of high level imperative programming languages; the
translational methods of logical or functional languages will not be
investigated.
First the structure of compilers will be given. Then we will deal
with scanners, that is, lexical analysers. In the topic of parsers –
syntactic analysers –, the two most successful methods will be studied:
the LL  and the LALR}
and the LALR}  parsing methods. The advanced methods of semantic analysis use O-ATG
grammars, and the task of code generation is also written by this type
of grammars. In this book these topics are not considered, nor we will
study such important and interesting problems as symbol table handling,
error repairing or code optimising. The reader can find very new,
modern and efficient methods for these methods in the bibliography.
parsing methods. The advanced methods of semantic analysis use O-ATG
grammars, and the task of code generation is also written by this type
of grammars. In this book these topics are not considered, nor we will
study such important and interesting problems as symbol table handling,
error repairing or code optimising. The reader can find very new,
modern and efficient methods for these methods in the bibliography.
A compiler translates the source language program (in short, source program) into a target language program (in short, target program). Moreover, it creates a list by which the programmer can check her private program. This list contains the detected errors, too.
Using the notation program (input)(output) the compiler can be written by
| compiler (source program)(target program, list). |
In the next, the structure of compilers are studied, and the tasks of program elements are described, using the previous notation.
The first program of a compiler transforms the source language program into character stream that is easy to handle. This program is the source handler.
| source handler(source program)(character stream). |
The form of the source program depends from the operating system. The source handler reads the file of source program using a system, called operating system, and omits the characters signed the end of lines, since these characters have no importance in the next steps of compilation. This modified, “poured” character stream will be the input data of the next steps.
The list created by the compiler has to contain the original source language program written by the programmer, instead of this modified character stream. Hence we define a list handler program,
| list handler (source program, errors)(list), |
which creates the list according to the file form of the operating system, and puts this list on a secondary memory.
It is practical to join the source handler and the list handler programs, since they have same input files. This program is the source handler.
| source handler (source program, errors)(character stream, list). |
The target program is created by the compiler from the generated target code. It is located on a secondary memory, too, usually in a transferable binary form. Of course this form depends on the operating system. This task is done by the code handler program.
| code handler (target code)(target program). |
Using the above programs, the structure of a compiler is the following (Figure 2.2):
source handler (source program, errors) (character string, list),
 compiler
compiler  (character stream)(target code, errors),
(character stream)(target code, errors),
code handler (target code)(target program).
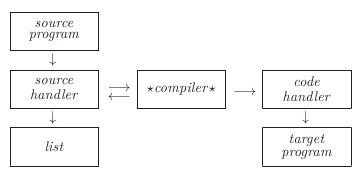
This
decomposition is not a sequence: the three program elements are
executed not sequentially. The decomposition consists of three
independent working units. Their connections are indicated by their
inputs and outputs.
In the next we do not deal with the handlers because of their
dependentness on computers, operating system and peripherals – although
the outer form, the connection with the user and the availability of
the compiler are determined mainly by these programs. The task of the
program  compiler
compiler  is the translation. It consists of two main subtasks: analysing the
input character stream, and to synthetizing the target code. The first
problem of the analysis is to
determine the connected characters in the character stream. These are
the symbolic items, e.g., the constants, names of variables, keywords,
operators. This is done by the lexical analyser, in short, scanner.
is the translation. It consists of two main subtasks: analysing the
input character stream, and to synthetizing the target code. The first
problem of the analysis is to
determine the connected characters in the character stream. These are
the symbolic items, e.g., the constants, names of variables, keywords,
operators. This is done by the lexical analyser, in short, scanner.
From the character stream the scanner makes a series of symbols and during this task it detects lexical errors.
| scanner (character stream)(series of symbols, lexical errors). |
This series of symbols is the input of the syntactic analyser, in short, parser. Its task is to check the syntactic structure of the program. This process is near to the checking the verb, the subject, predicates and attributes of a sentence by a language teacher in a language lesson. The errors detected during this analysis are the syntactic errors. The result of the syntactic analysis is the syntax tree of the program, or some similar equivalent structure.
| parser (series of symbols)(syntactically analysed program, syntactic errors). |
The third program of the analysis is the semantic analyser.
Its task is to check the static semantics. For example, when the
semantic analyser checks declarations and the types of variables in the
expression a + b, it verifies whether the variables a and b are declared, do they are of the same type, do they have values? The errors detected by this program are the semantic errors.
| semantic analyser (syntactically analysed program)(analysed program, semantic errors). |
The output of the semantic analyser is the input of the programs of synthesis. The first step of the synthesis is the code generation, that is made by the code generator:
| code generator (analysed program)(target code). |
The target code usually depends on the computer and the operating system. It is usually an assembly language program or machine code. The next step of synthesis is the code optimisation:
| code optimiser (target code)(target code). |
The code optimiser transforms the target code on such a way that the new code is better in many respect, for example running time or size.
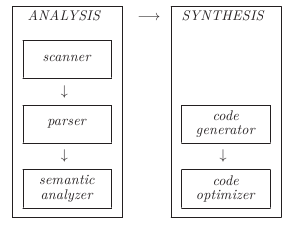
As it follows from the considerations above, a compiler consists of the next components (the structure of the  compiler
compiler  program is in the Figure 2.3):
program is in the Figure 2.3):
source handler (source program, errors)(character stream, list),
scanner (character stream)(series of symbols, lexical errors),
parser (series of symbols)(syntactically analysed program, syntactic errors),
semantic analyser (syntactically analysed program)(analysed program, semantic errors),
code generator (analysed program)(target code),
code optimiser (target code)(target code),
code handler (target code)(target program).
The algorithm of the part of the compiler, that performs analysis and synthesis, is the next:

Compiler 
1 determine the symbolic items in the text of source program 2 check the syntactic correctness of the series of symbols 3 check the semantic correctness of the series of symbols 4 generate the target code 5 optimise the target code
The objects written in the first two points will be analysed in the next sections.
Exercises
2.1-1 Using the above notations, give the structure of interpreters.
2.1-2 Take a programming language, and write program details in which there are lexical, syntactic and semantic errors.
2.1-3 Give respects in which the code optimiser can create better target code than the original.
The source-handler transforms the source program into a character stream. The main task of lexical analyser (scanner) is recognising the symbolic units in this character stream. These symbolic units are named symbols.
Unfortunately, in different programming languages the same symbolic
units consist of different character streams, and different symbolic
units consist of the same character streams. For example, there is a
programming language in which the 1. and .10 characters mean real numbers. If we concatenate these symbols, then the result is the 1..10
character stream. The fact, that a sign of an algebraic function is
missing between the two numbers, will be detected by the next analyser,
doing syntactic analysis. However, there are programming languages in
which this character stream is decomposited into three components: 1
and 10 are the lower and upper limits of an interval type variable.
The lexical analyser determines not only the characters of a symbol, but the attributes derived from the surrounded text. Such attributes are, e.g., the type and value of a symbol.
The scanner assigns codes to the symbols, same codes to the same sort of symbols. For example the code of all integer numbers is the same; another unique code is assigned to variables.
The lexical analyser transforms the character stream into the series of symbol codes and the attributes of a symbols are written in this series, immediately after the code of the symbol concerned.
The output information of the lexical analyser is not “readable”: it is usually a series of binary codes. We note that, in the viewpoint of the compiler, from this step of the compilation it is no matter from which characters were made the symbol, i.e. the code of the if symbol was made form English if or Hungarian ha or German wenn characters. Therefore, for a program language using English keywords, it is easy to construct another program language using keywords of another language. In the compiler of this new program language the lexical analysis would be modified only, the other parts of the compiler are unchanged.
The exact definition of symbolic units would be given by regular grammar, regular expressions or deterministic finite automaton. The theories of regular grammars, regular expressions and deterministic finite automata were studied in previous chapters.
Practically the lexical analyser may be a part of the syntactic analysis. The main reason to distinguish these analysers is that a lexical analyser made from regular grammar is much more simpler than a lexical analyser made from a context-free grammar. Context-free grammars are used to create syntactic analysers.
One of the most popular methods to create the lexical analyser is the following:
-
describe symbolic units in the language of regular expressions, and from this information construct the deterministic finite automaton which is equivalent to these regular expressions,
-
implement this deterministic finite automaton.
We note that, in writing of symbols regular expressions are used,
because they are more comfortable and readable then regular grammars.
There are standard programs as the lex of
UNIX systems, that generate a complete syntactical analyser from
regular expressions. Moreover, there are generator programs that give
the automaton of scanner, too.
A very trivial implementation of the deterministic finite automaton uses multidirectional cASE
instructions. The conditions of the branches are the characters of
state transitions, and the instructions of a branch represent the new
state the automaton reaches when it carries out the given state
transition.
The main principle of the lexical analyser is building a symbol from the longest series of symbols. For example the string ABC is a three-letters symbol, rather than three one-letter symbols. This means that the alternative instructions of the cASE branch read characters as long as they are parts of a constructed symbol.
Functions can belong to the final states of the automaton. For example, the function converts constant symbols into an inner binary forms of constants, or the function writes identifiers to the symbol table.
The input stream of the lexical analyser contains tabulators and space characters, since the source-handler expunges the carriage return and line feed characters only. In most programming languages it is possible to write a lot of spaces or tabulators between symbols. In the point of view of compilers these symbols have no importance after their recognition, hence they have the name white spaces.
Expunging white spaces is the task of the lexical analyser. The description of the white space is the following regular expression:

where space and the tab tabulator are the characters which build the white space symbols and  is the symbol for the or
function. No actions have to make with this white space symbols, the
scanner does not pass these symbols to the syntactic analyser.
is the symbol for the or
function. No actions have to make with this white space symbols, the
scanner does not pass these symbols to the syntactic analyser.
Some examples for regular expression:
Example 2.1 Introduce the following notations: Let  be an arbitrary digit, and let
be an arbitrary digit, and let  be an arbitrary letter,
be an arbitrary letter,

the not-visible characters are denoted by their short names, and let  be the name of the empty character stream.
be the name of the empty character stream.  denotes a character distinct from
denotes a character distinct from  . The regular expressions are:
. The regular expressions are:
-
real number:
 ,
, -
positive integer and real number:
 ,
, -
identifier:
 ,
, -
comment:
 ,
, -
comment terminated by
 :
:  ,
, -
string of characters:
 .
.
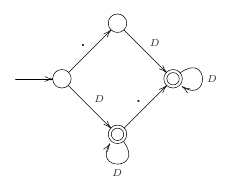
Deterministic finite automata constructed from regular expressions 2 and 3 are in Figures 2.4 and 2.5.
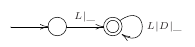
The
task of lexical analyser is to determine the text of symbols, but not
all the characters of a regular expression belong to the symbol. As is
in the 6th example, the first and the last "
characters do not belong to the symbol. To unravel this problem, a
buffer is created for the scanner. After recognising of a symbol, the
characters of these symbols will be in the buffer. Now the
deterministic finite automaton is supplemented by a  transfer function, where
transfer function, where  means that the character
means that the character  is inserted into the buffer.
is inserted into the buffer.
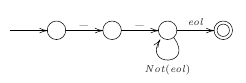
Example 2.2 The 4th and 6th regular expressions of the example 2.1 are supplemented by the  function, automata for these expressions are in Figures 2.6 and 2.7. The automaton of the 4th regular expression has none
function, automata for these expressions are in Figures 2.6 and 2.7. The automaton of the 4th regular expression has none  function, since it recognises comments. The automaton of the 6th regular expression recognises
function, since it recognises comments. The automaton of the 6th regular expression recognises This is a “string” from the character string ”This is a “”string”””.
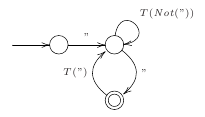
Now
we write the algorithm of the lexical analyser given by deterministic
finite automaton. (The state of the set of one element will be denoted
by the only element of the set).
Let  be the deterministic finite automaton, which is the scanner. We augment the alphabet
be the deterministic finite automaton, which is the scanner. We augment the alphabet  with a new notion: let others be all the characters not in
with a new notion: let others be all the characters not in  . Accordingly, we modify the transition function
. Accordingly, we modify the transition function  :
:

The algorithm of parsing, using the augmented automaton  , follows:
, follows:
Lex-analyse(
)
1,
first character of
2
3
WHILEand
4
DOIF5
THEN6
next character of
7
ELSE8
IFand
9
THEN10
ELSE11
RETURN
The algorithm has two parameters: the first one is the input character string terminated by  , the second one is the automaton of the scanner. In the line 1 the state of the scanner is set to
, the second one is the automaton of the scanner. In the line 1 the state of the scanner is set to  , to the start state of the automaton, and the first character of the input string is determined. The variable
, to the start state of the automaton, and the first character of the input string is determined. The variable  indicates that the algorithm is analysing the input string, the text analysing
is set in this variable in the line 2. In the line 5 a state-transition
is executed. It can be seen that the above augmentation is needed to
terminate in case of unexpected, invalid character. In line 8–10 the O.K. means that the analysed character string is correct, and the ERROR signs that a lexical error was detected. In the case of successful termination the variable
indicates that the algorithm is analysing the input string, the text analysing
is set in this variable in the line 2. In the line 5 a state-transition
is executed. It can be seen that the above augmentation is needed to
terminate in case of unexpected, invalid character. In line 8–10 the O.K. means that the analysed character string is correct, and the ERROR signs that a lexical error was detected. In the case of successful termination the variable  contains the
contains the  character, at erroneous termination it contains the invalid character.
character, at erroneous termination it contains the invalid character.
We note that the algorithm LEX-ANALYSE
recognise one symbol only, and then it is terminated. The program
written in a programming language consists of a lot of symbols, hence
after recognising a symbol, the algorithm have to be continued by
detecting the next symbol. The work of the analyser is restarted at the
state of the automaton. We propose the full algorithm of the lexical
analyser as an exercise (see Problem 2-1).
Example 2.3 The automaton of the identifier in the point 3 of example 2.1 is in Figure 2.5. The start state is 0, and the final state is 1. The transition function of the automaton follows:
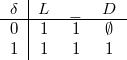
The augmented transition function of the automaton:
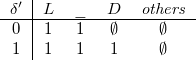
The algorithm LEX-ANALYSE gives the series of states  and sign O.K. to the input string
and sign O.K. to the input string abc123#, it gives sign ERROR to the input sting 9abc#, and the series  and sign ERROR to the input string
and sign ERROR to the input string abc 
123.
In this subsection we investigate the problems emerged during running of lexical analyser, and supply solutions for these problems.
All of programming languages allows identifiers having special names and predefined meanings. They are the keywords. Keywords are used only in their original notions. However there are identifiers which also have predefined meaning but they are alterable in the programs. These words are called standard words.
The number of keywords and standard words in programming languages
are vary. For example, there is a program language, in which three
keywords are used for the zero value: zero, zeros és zeroes.
Now we investigate how does the lexical analyser recognise keywords and standard words, and how does it distinguish them from identifiers created by the programmers.
The usage of a standard word distinctly from its original meaning renders extra difficulty, not only to the compilation process but also to the readability of the program, such as in the next example:
if if then else = then;
or if we declare procedures which have names begin and end:
begin
begin; begin end; end; begin end;
end;
Recognition of keywords and standard words is a simple task if they are written using special type characters (for example bold characters), or they are between special prefix and postfix characters (for example between apostrophes).
We give two methods to analyse keywords.
-
All keywords is written as a regular expression, and the implementation of the automaton created to this expression is prepared. The disadvantage of this method is the size of the analyser program. It will be large even if the description of keywords, whose first letter are the same, are contracted.
-
Keywords are stored in a special keyword-table. The words can be determined in the character stream by a general identifier- recogniser. Then, by a simple search algorithm, we check whether this word is in the keyword- table. If this word is in the table then it is a keyword. Otherwise it is an identifier defined by the user. This method is very simple, but the efficiency of search depends on the structure of keyword-table and on the algorithm of search. A well-selected mapping function and an adequate keyword-table should be very effective.
If it is possible to write standard words in the programming language, then the lexical analyser recognises the standard words using one of the above methods. But the meaning of this standard word depends of its context. To decide, whether it has its original meaning or it was overdefined by the programmer, is the task of syntactic analyser.
Since the lexical analyser creates a symbol from the longest character stream, the lexical analyser has to look ahead one or more characters for the allocation of the right-end of a symbol. There is a classical example for this problem, the next two FORTRAN statements:
DO 10 I = 1.1000
DO 10 I = 1,1000
In the FORTRAN programming language space-characters are not
important characters, they do not play an important part, hence the
character between 1 and 1000 decides that the statement is a DO cycle statement or it is an assignment statement for the DO10I identifier.
To sign the right end of the symbol, we introduce the symbol / into the description of regular expressions. Its name is lookahead operator. Using this symbol the description of the above DO keyword is the next

This definition means that the lexical analyser says that the first two D and O letters are the DO keyword, if looking ahead, after the O
letter, there are letters or digits, then there is an equal sign, and
after this sign there are letters or digits again, and finally, there
is a “,” character. The lookahead operator implies that the lexical analyser has to look ahead after the DO characters. We remark that using this lookahead method the lexical analyser recognises the DO keyword even if there is an error in the character stream, such as in the DO2A=3B, character stream, but in a correct assignment statement it does not detect the DO keyword.
In the next example we concern for positive integers. The definition of integer numbers is a prefix of the definition of the real numbers, and the definition of real numbers is a prefix of the definition of real numbers containing explicit power-part.

The automaton for all of these three expressions is the automaton of the longest character stream, the real number containing explicit power-part.
The problem of the lookahead symbols is resolved using the following algorithm. Put the character into a buffer, and put an auxiliary information aside this character. This information is “it is invalid”. If the character string, using this red character, is not correct; otherwise we put the type of the symbol into here. If the automaton is in a final-state, then the automaton recognises a real number with explicit power-part. If the automaton is in an internal state, and there is no possibility to read a next character, then the longest character stream which has valid information is the recognised symbol.
Example 2.4 Consider the 12.3e+f# character stream, where the character # is the endsign of the analysed text. If in this character stream there was a positive integer number in the place of character f, then this character stream should be a real number. The content of the puffer of lexical analyser:
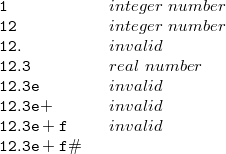
The recognised symbol is the 12.3 real number. The lexical analysing is continued at the text e+f.
The number of lookahead-characters may be determined from the definition of the program language. In the modern languages this number is at most two.
There are programming languages, for example C, in which small letters and capital letters are different. In this case the lexical analyser uses characters of all symbols without modification. Otherwise the lexical analyser converts all characters to their small letter form or all characters to capital letter form. It is proposed to execute this transformation in the source handler program.
At the case of simpler programming languages the lexical analyser writes the characters of the detected symbol into the symbol table, if this symbol is not there. After writing up, or if this symbol has been in the symbol table already, the lexical analyser returns the table address of this symbol, and writes this information into its output. These data will be important at semantic analysis and code generation.
In programming languages the directives serve to control the compiler. The lexical analyser identifies directives and recognises their operands, and usually there are further tasks with these directives.
If the directive is the if of the
conditional compilation, then the lexical analyser has to detect all of
parameters of this condition, and it has to evaluate the value of the
branch. If this value is false, then it has to omit the next lines until the else or endif
directive. It means that the lexical analyser performs syntactic and
semantic checking, and creates code-style information. This task is
more complicate if the programming language gives possibility to write
nested conditions.
Other types of directives are the substitution of macros and including files into the source text. These tasks are far away from the original task of the lexical analyser.
The usual way to solve these problems is the following. The compiler executes a pre-processing program, and this program performs all of the tasks written by directives.
Exercises
2.2-1 Give a regular expression to the comments of a programming language. In this language the delimiters of comments are  and
and  , and inside of a comment may occurs
, and inside of a comment may occurs  and
and  characters, but
characters, but  is forbidden.
is forbidden.
2.2-2 Modify the result of the previous question if it is supposed that the programming language has possibility to write nested comments.
2.2-3 Give a regular expression for positive integer numbers, if the pre- and post-zero characters are prohibited. Give a deterministic finite automaton for this regular expression.
2.2-4 Write a program, which re-creates the original source program from the output of lexical analyser. Pay attention for nice an correct positions of the re-created character streams.
The perfect definition of a programming language includes the definition of its syntax and semantics.
The syntax of the programming languages cannot be written by context free grammars. It is possible by using context dependent grammars, two-level grammars or attribute grammars. For these grammars there are not efficient parsing methods, hence the description of a language consists of two parts. The main part of the syntax is given using context free grammars, and for the remaining part a context dependent or an attribute grammar is applied. For example, the description of the program structure or the description of the statement structure belongs to the first part, and the type checking, the scope of variables or the correspondence of formal and actual parameters belong to the second part.
The checking of properties written by context free grammars is called syntactic analysis or parsing. Properties that cannot be written by context free grammars are called form the static semantics. These properties are checked by the semantic analyser.
The conventional semantics has the name run-time semantics or dynamic semantics. The dynamic semantics can be given by verbal methods or some interpreter methods, where the operation of the program is given by the series of state-alterations of the interpreter and its environment.
We deal with context free grammars, and in this section we will use extended grammars for the syntactic analysis. We investigate on methods of checking of properties which are written by context free grammars. First we give basic notions of the syntactic analysis, then the parsing algorithms will be studied.
Definition 2.1 Let  be a grammar. If
be a grammar. If  and
and  then
then  is a sentential form. If
is a sentential form. If  and
and  then
then  is a sentence of the language defined by the grammar.
is a sentence of the language defined by the grammar.
The sentence has an important role in parsing. The program written by a programmer is a series of terminal symbols, and this series is a sentence if it is correct, that is, it has not syntactic errors.
Definition 2.2 Let  be a grammar and
be a grammar and  is a sentential form (
is a sentential form ( ). We say that
). We say that  is a phrase of
is a phrase of  , if there is a symbol
, if there is a symbol  , which
, which  and
and  . We say that
. We say that  is a simple phrase of
is a simple phrase of  , if
, if  .
.
We note that every sentence is phrase. The leftmost simple phrase has an important role in parsing; it has its own name.
Definition 2.3 The leftmost simple phase of a sentence is the handle.
The leaves of the syntax tree of a sentence are terminal symbols, other points of the tree are nonterminal symbols, and the root symbol of the tree is the start symbol of the grammar.
In an ambiguous grammar there is at least one sentence, which has several syntax trees. It means that this sentence has more than one analysis, and therefore there are several target programs for this sentence. This ambiguity raises a lot of problems, therefore the compilers translate languages generated by unambiguous grammars only.
We suppose that the grammar  has properties as follows:
has properties as follows:
-
the grammar is cycle free, that is, it has not series of derivations rules
 (
( ),
), -
the grammar is reduced, that is, there are not “unused symbols” in the grammar, all of nonterminals happen in a derivation, and from all nonterminals we can derive a part of a sentence. This last property means that for all
 it is true that
it is true that  , where
, where  and
and  (
( ).
).
As it has shown, the lexical analyser translates the program written by a programmer into series of terminal symbols, and this series is the input of syntactic analyser. The task of syntactic analyser is to decide if this series is a sentence of the grammar or it is not. To achieve this goal, the parser creates the syntax tree of the series of symbols. From the known start symbol and the leaves of the syntax tree the parser creates all vertices and edges of the tree, that is, it creates a derivation of the program. If this is possible, then we say that the program is an element of the language. It means that the program is syntactically correct.
Hence forward we will deal with left to right parsing methods. These methods read the symbols of the programs left to right. All of the real compilers use this method.
To create the inner part of the syntax tree there are several
methods. One of these methods builds the syntax tree from its start
symbol  . This method is called top-down method. If the parser goes from the leaves to the symbol
. This method is called top-down method. If the parser goes from the leaves to the symbol  , then it uses the bottom-up parsing method.
, then it uses the bottom-up parsing method.
We deal with top-down parsing methods in Subsection 2.3.1. We investigate bottom-up parsers in Subsection 2.3.2; now these methods are used in real compilers.
If we analyse from top to down then we start with the start symbol. This symbol is the root of syntax tree; we attempt to construct the syntax tree. Our goal is that the leaves of tree are the terminal symbols.
First we review the notions that are necessary in the top-down parsing. Then the  table methods and the recursive descent method will be analysed.
table methods and the recursive descent method will be analysed.
 grammars
grammars Our methods build the syntax tree top-down and read symbols of the program left to right. For this end we try to create terminals on the left side of sentential forms.
Definition 2.4 If  then the leftmost direct derivation of the sentential form
then the leftmost direct derivation of the sentential form  (
( ) is
) is  , and
, and

Definition 2.5 If all of direct derivations in  (
( ) are leftmost, then this derivation is said to be leftmost derivation, and
) are leftmost, then this derivation is said to be leftmost derivation, and

In a leftmost derivation terminal symbols appear at the left side of the sentential forms. Therefore we use leftmost derivations in all of top-down parsing methods. Hence if we deal with top-down methods, we do not write the text “leftmost” at the arrows.
One might as well say that we create all possible syntax trees. Reading leaves from left to right, we take sentences of the language. Then we compare these sentences with the parseable text and if a sentence is same as the parseable text, then we can read the steps of parsing from the syntax tree which is belongs to this sentence. But this method is not practical; generally it is even impossible to apply.
A good idea is the following. We start at the start symbol of the grammar, and using leftmost derivations we try to create the text of the program. If we use a not suitable derivation at one of steps of parsing, then we find that, at the next step, we can not apply a proper derivation. At this case such terminal symbols are at the left side of the sentential form, that are not same as in our parseable text.
For the leftmost terminal symbols we state the theorem as follows.
 (
( ) és
) és  , then
, then  .
.The proof of this theorem is trivial. It is not possible to change the leftmost terminal symbols  of sentential forms using derivation rules of a context free grammar.
of sentential forms using derivation rules of a context free grammar.
This theorem is used during the building of syntax tree, to check that the leftmost terminals of the tree are same as the leftmost symbols of the parseable text. If they are different then we created wrong directions with this syntax tree. At this case we have to make a backtrack, and we have to apply an other derivation rule. If it is impossible (since for example there are no more derivation rules) then we have to apply a backtrack once again.
General top-down methods are realized by using backtrack algorithms, but these backtrack steps make the parser very slow. Therefore we will deal only with grammars such that have parsing methods without backtracks.
The main properties of  grammars are the following. If, by creating the leftmost derivation
grammars are the following. If, by creating the leftmost derivation  (
( ), we obtain the sentential form
), we obtain the sentential form  (
( ) at some step of this derivation, and our goal is to achieve
) at some step of this derivation, and our goal is to achieve  , then the next step of the derivation for nonterminal
, then the next step of the derivation for nonterminal  is determinable unambiguously from the first
is determinable unambiguously from the first  symbols of
symbols of  .
.
To look ahead  symbols we define the function
symbols we define the function  .
.
Definition 2.7 Let 
 be the set as follows.
be the set as follows.



The set  consists of the first
consists of the first  symbols of
symbols of  ; for
; for  , it consists the full
, it consists the full  . If
. If  , then
, then  .
.
Definition 2.8 The grammar  is a
is a  grammar
grammar  , if for derivations
, if for derivations

( ) the equality
) the equality

implies

Using this definition, if a grammar is a  grammar then the
grammar then the  symbol after the parsed
symbol after the parsed  determine the next derivation rule unambiguously (Figure 2.8).
determine the next derivation rule unambiguously (Figure 2.8).
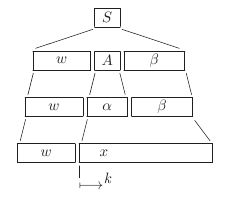
One can see from this definition that if a grammar is an  grammar then for all
grammar then for all  it is also an
it is also an  grammar. If we speak about
grammar. If we speak about  grammar then we also mean that
grammar then we also mean that  is the least number such that the properties of the definition are true.
is the least number such that the properties of the definition are true.
Example 2.5 The next grammar is a  grammar. Let
grammar. Let  be a grammar whose derivation rules are:
be a grammar whose derivation rules are:


We have to use the derivation  for the start symbol
for the start symbol  if the next symbol of the parseable text is
if the next symbol of the parseable text is  or
or  . We use the derivation
. We use the derivation  if the next symbol is the mark #.
if the next symbol is the mark #.
Example 2.6 The next grammar is a  grammar. Let
grammar. Let  be a grammar whose the derivation rules are:
be a grammar whose the derivation rules are:


One can see that at the last step of derivations

and

if we look ahead one symbol, then in both derivations we obtain the symbol  . The proper rule for symbol
. The proper rule for symbol  is determined to look ahead two symbols (
is determined to look ahead two symbols ( or
or  ).
).
There are context free grammars such that are not  grammars. For example the next grammar is not
grammars. For example the next grammar is not  grammar for any
grammar for any  .
.
Example 2.7 Let  be a grammar whose the derivation rules are:
be a grammar whose the derivation rules are:



 consists of sentences
consists of sentences  és
és 
 . If we analyse the sentence
. If we analyse the sentence  , then at the first step we can not decide by looking ahead
, then at the first step we can not decide by looking ahead  symbols whether we have to use the derivation
symbols whether we have to use the derivation  or
or  , since for all
, since for all 
 .
.
By the definition of the  grammar, if we get the sentential form
grammar, if we get the sentential form  using leftmost derivations, then the next
using leftmost derivations, then the next  symbol determines the next rule for symbol
symbol determines the next rule for symbol  . This is stated in the next theorem.
. This is stated in the next theorem.
Theorem 2.9 Grammar  is a
is a  grammar iff
grammar iff

implies

If there is a  rule in the grammar, then the set
rule in the grammar, then the set  consists the
consists the  length prefixes of terminal series generated from
length prefixes of terminal series generated from  . It implies that, for deciding the property
. It implies that, for deciding the property  , we have to check not only the derivation rules, but also the infinite derivations.
, we have to check not only the derivation rules, but also the infinite derivations.
We can give good methods, that are used in the practice, for  grammars only. We define the follower-series, which follow a symbol or series of symbols.
grammars only. We define the follower-series, which follow a symbol or series of symbols.
Definition 2.10  , and if
, and if  , then
, then  (
( ) .
) .
The second part of the definition is necessary because if there are no symbols after the  in the derivation
in the derivation  , that is
, that is  , then the next symbol after
, then the next symbol after  is the mark # only.
is the mark # only.
 (
( ) consists of terminal symbols that can be immediately after the symbol
) consists of terminal symbols that can be immediately after the symbol  in the derivation
in the derivation

Theorem 2.11 The grammar  is a
is a  grammar iff, for all nonterminal
grammar iff, for all nonterminal  and for all derivation rules
and for all derivation rules  ,
,

In this theorem the expression  means that we have to concatenate to
means that we have to concatenate to  the elements of set
the elements of set  separately, and for all elements of this new set we have to apply the function
separately, and for all elements of this new set we have to apply the function  .
.
It is evident that Theorem 2.11 is suitable to decide whether a grammar is  or it is not.
or it is not.
Hence forward we deal with  languages determined by
languages determined by  grammars, and we investigate the parsing methods of
grammars, and we investigate the parsing methods of  languages. For the sake of simplicity, we omit indexes from the names of functions
languages. For the sake of simplicity, we omit indexes from the names of functions  és
és  .
.
The elements of the set  are determined using the next algorithm.
are determined using the next algorithm.
First(
)
1IF2
THEN3
IF, where
4
THEN5
IF, where
6
THENIF7
THEN8
ELSE9
FORall
10
DO11
FOR
TO12
DOIF13
THEN14
IF15
THEN16
IF17
THEN18
FOR
TO19
DOIF20
THEN21
IF22
THEN23
RETURN
In lines 1–4 the set is given for  and a terminal symbol
and a terminal symbol  . In lines 5–15 we construct the elements of this set for a nonterminal
. In lines 5–15 we construct the elements of this set for a nonterminal  . If
. If  is derivated from
is derivated from  then we put symbol
then we put symbol  into the set in lines 6–7 and 14–15. If the argument is a symbol stream
then the elements of the set are constructed in lines 16–22. We notice
that we can terminate the
into the set in lines 6–7 and 14–15. If the argument is a symbol stream
then the elements of the set are constructed in lines 16–22. We notice
that we can terminate the fOR cycle in lines 11 and 18 if  , since in this case it is not possible to derive symbol
, since in this case it is not possible to derive symbol  from
from  .
.
In Theorem 2.11 and hereafter, it is necessary to know the elements of the set  . The next algorithm constructs this set.
. The next algorithm constructs this set.
Follow(
)
1IF2
THEN3
ELSE4
FORall rules5
DOIF6
THEN7
IF8
THEN9
ELSE10
RETURN
The elements of the  set get into the set
set get into the set  .
In lines 4–9 we check that, if the argumentum is at the right side of a
derivation rule, what symbols may stand immediately after him. It is
obvious that no
.
In lines 4–9 we check that, if the argumentum is at the right side of a
derivation rule, what symbols may stand immediately after him. It is
obvious that no  is in this set, and the symbol
is in this set, and the symbol  is in the set only if the argumentum is the rightmost symbol of a sentential form.
is in the set only if the argumentum is the rightmost symbol of a sentential form.
Suppose that we analyse a series of terminal symbols  and the part
and the part  has already been analysed without errors. We analyse the text with a
top-down method, so we use leftmost derivations. Suppose that our
sentential form is
has already been analysed without errors. We analyse the text with a
top-down method, so we use leftmost derivations. Suppose that our
sentential form is  , that is, it has form
, that is, it has form  or
or  (
( ) (Figure 2.9).
) (Figure 2.9).
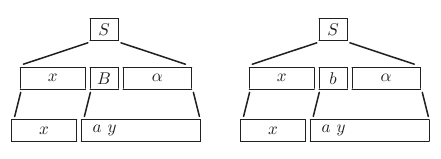
In the first case the next step is the substitution of symbol  . We know the next element of the input series, this is the terminal
. We know the next element of the input series, this is the terminal  , therefore we can determine the correct substitution of symbol
, therefore we can determine the correct substitution of symbol  . This substitution is the rule
. This substitution is the rule  for which
for which  . If there is such a rule then, according to the definition of
. If there is such a rule then, according to the definition of  grammar, there is exactly one. If there is not such a rule, then a syntactic error was found.
grammar, there is exactly one. If there is not such a rule, then a syntactic error was found.
In the second case the next symbol of the sentential form is the terminal symbol  , thus we look out for the symbol
, thus we look out for the symbol  as the next symbol of the analysed text. If this comes true, that is,
as the next symbol of the analysed text. If this comes true, that is,  , then the symbol
, then the symbol  is a correct symbol and we can go further. We put the symbol
is a correct symbol and we can go further. We put the symbol  into the already analysed text. If
into the already analysed text. If  , then here is a syntactic error. We can see that the position of the error is known, and the erroneous symbol is the terminal symbol
, then here is a syntactic error. We can see that the position of the error is known, and the erroneous symbol is the terminal symbol  .
.
The action of the parser is the following. Let # be the sign of the right end of the analysed text, that is, the mark # is the last symbol of the text. We use a stack through the analysing, the bottom of the stack is signed by mark #, too. We give serial numbers to derivation rules and through the analysing we write the number of the applied rule into a list. At the end of parsing we can write the syntax tree from this list (Figure 2.10).
We sign the state of the parser using triples  . The symbol
. The symbol  is the text not analysed yet.
is the text not analysed yet.  is the part of the sentential form corresponding to the not analysed text; this information is in the stack, the symbol
is the part of the sentential form corresponding to the not analysed text; this information is in the stack, the symbol  is at the top of the stack.
is at the top of the stack.  is the list of the serial numbers of production rules.
is the list of the serial numbers of production rules.
If we analyse the text then we observe the symbol  at the top of the stack, and the symbol
at the top of the stack, and the symbol  that is the first symbol of the not analysed text. The name of the symbol
that is the first symbol of the not analysed text. The name of the symbol  is actual symbol. There are pointers to the top of the stack and to the actual symbol.
is actual symbol. There are pointers to the top of the stack and to the actual symbol.
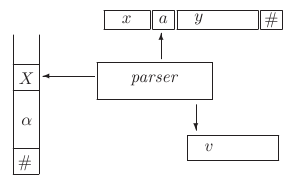
We use a top down parser, therefore the initial content of the stack is  . If the initial analysed text is
. If the initial analysed text is  , then the initial state of the parsing process is the triple
, then the initial state of the parsing process is the triple  , where
, where  is the sign of the empty list.
is the sign of the empty list.
We analyse the text, the series of symbols using a parsing table. The rows of this table sign the symbols at the top of the stack, the columns of the table sign the next input symbols, and we write mark # to the last row and the last column of the table. Hence the number of rows of the table is greater by one than the number of symbols of the grammar, and the number of columns is greater by one than the number of terminal symbols of the grammar.
The element  of the table is as follows.
of the table is as follows.
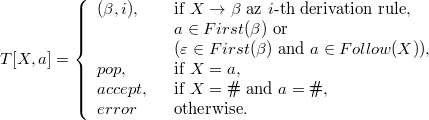
We fill in the parsing table using the following algorithm.
LL(1)-Table-Fill-in(
)
1FORall2
DOIFthe
-th rule 3
THENFORall-ra 4
DO5
IF6
THENFORall7
DO8
FORall9
DO10
11
FORalland all
12
DOIF”empty” 13
THEN14
RETURN
At the line 10 we write the text accept into the right lower corner of the table. At the lines 8–9 we write the text pop into the main diagonal of the square labelled by terminal symbols. The program in lines 1–7 writes a tuple in which the first element is the right part of a derivation rule and the second element is the serial number of this rule. In lines 12–13 we write error texts into the empty positions.
The actions of the parser are written by state-transitions. The initial state is  , where the initial text is
, where the initial text is  , and the parsing process will be finished if the parser goes into the state
, and the parsing process will be finished if the parser goes into the state  , this state is the final state. If the text is
, this state is the final state. If the text is  in an intermediate step, and the symbol
in an intermediate step, and the symbol  is at the top of stack, then the possible state-transitions are as follows.
is at the top of stack, then the possible state-transitions are as follows.

The letters O.K. mean that the analysed text is syntactically correct; the text ERROR means that a syntactic error is detected.
The actions of this parser are written by the next algorithm.
LL(1)-Parser(
)
1,
2
REPEAT3IFés
4
THEN5
ELSEIF6
THEN
Then
. 7
ELSEIF8
THEN
Then
. 9
ELSE
Then
. 10
UNTILOR11
RETURN

The input parameters of this algorithm are the text  and the parsing table
and the parsing table  . The variable
. The variable  describes the state of the parser: its value is analyse, during the analysis, and it is either O.K. or ERROR. at the end. The parser determines his action by the actual symbol
describes the state of the parser: its value is analyse, during the analysis, and it is either O.K. or ERROR. at the end. The parser determines his action by the actual symbol  and by the symbol at the top of the stack, using the parsing table
and by the symbol at the top of the stack, using the parsing table  . In the line 3–4 the parser builds the syntax tree using the derivation rule
. In the line 3–4 the parser builds the syntax tree using the derivation rule  . In lines 5–6 the parser executes a shift action, since there is a symbol
. In lines 5–6 the parser executes a shift action, since there is a symbol  at the top of the stack. At lines 8–9 the algorithm finishes his work
if the stack is empty and it is at the end of the text, otherwise a
syntactic error was detected. At the end of this work the result is O.K. or ERROR in the variable
at the top of the stack. At lines 8–9 the algorithm finishes his work
if the stack is empty and it is at the end of the text, otherwise a
syntactic error was detected. At the end of this work the result is O.K. or ERROR in the variable  , and, as a result, there is the triple
, and, as a result, there is the triple  at the output of this algorithm. If the text was correct, then we can
create the syntax tree of the analysed text from the third element of
the triple. If there was an error, then the first element of the triple
points to the position of the erroneous symbol.
at the output of this algorithm. If the text was correct, then we can
create the syntax tree of the analysed text from the third element of
the triple. If there was an error, then the first element of the triple
points to the position of the erroneous symbol.
Example 2.8 Let  be a grammar
be a grammar  , where the set
, where the set  of derivation rules:
of derivation rules:





From these rules we can determine the  sets. To fill in the parsing table, the following sets are required:
sets. To fill in the parsing table, the following sets are required:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
The parsing table is as follows. The empty positions in the table mean errors
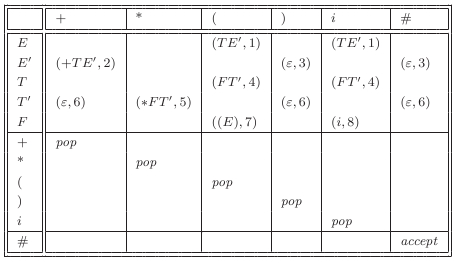
Example 2.9 Using the parsing table of the previous example, analyse the text  .
.
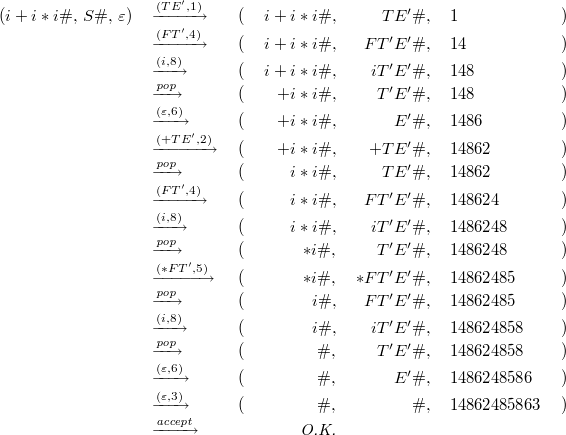
The syntax tree of the analysed text is the Figure 2.11.
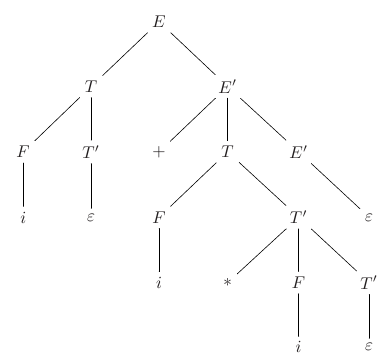
There is another frequently used method for the backtrackless top-down parsing. Its essence is that we write a real program for the applied grammar. We create procedures to the symbols of grammar, and using these procedures the recursive procedure calls realize the stack of the parser and the stack management. This is a top-down parsing method, and the procedures call each other recursively; it is the origin of the name of this method, that is, recursive-descent method.
To check the terminal symbols we create the procedure Check. Let the parameter of this procedure be the, that is the leftmost unchecked terminal symbol of the sentential form, and let the actual symbol be the symbol which is analysed in that moment.
procedure Check(a);
begin
if actual_symbol = a
then Next_symbol
else Error_report
end;
The procedure Next_symbol reads the next symbol, it is a call for the lexical analyser. This procedure determines the next symbol and put this symbol into the actual_symbol variable. The procedure Error_report creates an error report and then finishes the parsing.
We create procedures to symbols of the grammar as follows. The procedure of the nonterminal symbol  is the next.
is the next.
procedure A;
begin
T(A)
end;
where T(A) is determined by symbols of the right part of derivation rule having symbol  in its left part.
in its left part.
The grammars which are used for syntactic analysis are reduced grammars.
It means that no unnecessary symbols in the grammar, and all of symbols
occur at the left side at least one reduction rule. Therefore, if we
consider the symbol  , there is at least one
, there is at least one  production rule.
production rule.
-
If there is only one production rule for the symbol
 ,
, -
let the program of the rule
 is as follows:
is as follows: Check(a), -
for the rule
 we give the procedure call
we give the procedure call B, -
for the rule

 we give the next block:
we give the next block: -
beginT(X_1);T(X_2);...T(X_n)end;
-
-
If there are more rules for the symbol
 :
: -
If the rules
 are
are  -free, that is from
-free, that is from  (
( ) it is not possible to deduce
) it is not possible to deduce  , then
, then T(A)case actual_symbol ofFirst(alpha_1) : T(alpha_1);First(alpha_2) : T(alpha_2);...First(alpha_n) : T(alpha_n)end;where
First(alpha_i)is the sign of the set .
.We note that this is the first point of the method of recursive-descent parser where we use the fact that the grammar is an
 grammar.
grammar. -
We use the
 grammar to write a programming language, therefore it is not comfortable to require that the grammar is a
grammar to write a programming language, therefore it is not comfortable to require that the grammar is a  -free grammar. For the rules
-free grammar. For the rules  we create the next
we create the next T(A)program:case actual_symbol ofFirst(alpha_1) : T(alpha_1);First(alpha_2) : T(alpha_2);...First(alpha_(n-1)) : T(alpha_(n-1));Follow(A) : skipend;where
Follow(A)is the set .
.In particular, if the rules
 for some
for some 

 , that is
, that is  , then the
, then the  -th row of the
-th row of the casestatement isFollow(A) : skip
-
In the program T(A), if it is possible, we use if-then-else or while statement instead of the statement case.
The start procedure, that is the main program of this parsing program, is the procedure which is created for the start symbol of the grammar.
We can create the recursive-descent parsing program with the next algorithm. The input of this algorithm is the grammar  , and the result is parsing program
, and the result is parsing program  . In this algorithm we use a
. In this algorithm we use a WRITE-PROGRAM procedure, which concatenates the new program lines to the program  . We will not go into the details of this algorithm.
. We will not go into the details of this algorithm.
Create-Rec-Desc(
)
12
WRITE-PROGRAM(3procedure Check(a);4begin5if actual_symbol = a6then Next_symbol7else Error_report8end;9)10FORall symbolof the grammar
11
DOIF12
THENWRITE-PROGRAM(13program S;14begin15REC-DESC-STAT16
end;17)18ELSEWRITE-PROGRAM(19procedure A;20begin21REC-DESC-STAT22
end;23)24RETURN
The algorithm creates the Check procedure in lines 2–9. Then, for all nonterminals of grammar  , it determines their procedures using the algorithm
, it determines their procedures using the algorithm REC-DESC-STAT. In the lines 11–17, we can see that for the start symbol  we create the main program. The output of the algorithm is the parsing program.
we create the main program. The output of the algorithm is the parsing program.
Rec-Desc-Stat(
)
1IFthere is only one rule2
THENREC-DESC-STAT1

. 3
ELSEREC-DESC-STAT2

. 4
RETURN
The form of the statements of the parsing program depends on the derivation rules of the symbol  . Therefore the algorithm
. Therefore the algorithm REC-DESC-STAT divides the next tasks into two parts. The algorithm REC-DESC-STAT1 deals with the case when there is only one derivation rule, and the algorithm REC-DESC-STAT2 creates the program for the alternatives.
Rec-Desc-Stat1(
)
1IF2
THENWRITE-PROGRAM(3Check(a)4)5IF6
THENWRITE-PROGRAM(7B8)9IF
10
THENWRITE-PROGRAM(11begin11 12REC-DESC-STAT1;13REC-DESC-STAT1;1415
REC-DESC-STAT116
end;17RETURN


Rec-Desc-Stat2(
)
1IFthe rulesare
- free 2
THENWRITE-PROGRAM(3case actual_symbol of4First(alpha_1) :REC-DESC-STAT1;5...6First(alpha_n) :REC-DESC-STAT17
end;8)9IFthere is a-rule,

10
THENWRITE-PROGRAM(11case actual_symbol of12First(alpha_1) :REC-DESC-STAT1;13...14First(alpha_(i-1)) :REC-DESC-STAT1;15Follow(A) : skip;16First(alpha_(i+1)) :REC-DESC-STAT1;17...18First(alpha_n) :REC-DESC-STAT119
end;20)21RETURN




These two algorithms create the program described above.
Checking the end of the parsed text is achieved by the recursive-
descent parsing method with the next modification. We generate a new
derivation rule for the end mark #. If the start symbol of the grammar
is  , then we create the new rule
, then we create the new rule  , where the new symbol
, where the new symbol  is the start symbol of our new grammar. The mark # is considered as
terminal symbol. Then we generate the parsing program for this new
grammar.
is the start symbol of our new grammar. The mark # is considered as
terminal symbol. Then we generate the parsing program for this new
grammar.
Example 2.10 We augment the grammar of the Example 2.8 in the above manner. The production rules are as follows.






In the example 2.8 we give the necessary  and
and  sets. We use the next sets:
sets. We use the next sets:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
In the comments of the program lines we give the using of these
sets. The first characters of the comment are the character pair --.
The program of the recursive-descent parser is the following.
program S';
begin
E;
Check(#)
end.
procedure E;
begin
T;
E'
end;
procedure E';
begin
case actual_symbol of
+ : begin -- First(+TE')
Check(+);
T;
E'
end;
),# : skip -- Follow(E')
end
end;
procedure T;
begin
F;
T'
end;
procedure T';
begin
case actual_symbol of
* : begin -- First(*FT')
Check(*);
F;
T'
end;
+,),# : skip -- Follow(T')
end
end;
procedure F;
begin
case actual_symbol of
( : begin -- First((E))
Check(();
E;
Check())
end;
i : Check(i) -- First(i)
end
end;
We can see that the main program of this parser belongs to the symbol  .
.
If we analyse from bottom to up, then we start with the program text. We search the handle of the sentential form, and we substitute the nonterminal symbol that belongs to the handle, for this handle. After this first step, we repeat this procedure several times. Our goal is to achieve the start symbol of the grammar. This symbol will be the root of the syntax tree, and by this time the terminal symbols of the program text are the leaves of the tree.
First we review the notions which are necessary in the parsing.
To analyse bottom-up, we have to determine the handle of the sentential form. The problem is to create a good method which finds the handle, and to find the best substitution if there are more than one possibilities.
Definition 2.12 If  , then the rightmost substitution of the sentential form
, then the rightmost substitution of the sentential form  (
( ) is
) is  , that is
, that is

Definition 2.13 If the derivation  (
( ) all of the substitutions were rightmost substitution, then this derivation is a rightmost derivation,
) all of the substitutions were rightmost substitution, then this derivation is a rightmost derivation,

In a rightmost derivation, terminal symbols are at the right side of the sentential form. By the connection of the notion of the handle and the rightmost derivation, if we apply the steps of a rightmost derivation backwards, then we obtain the steps of a bottom-up parsing. Hence the bottom-up parsing is equivalent with the “inverse” of a rightmost derivation. Therefore, if we deal with bottom-up methods, we will not write the text “rightmost” at the arrows.
General bottom-up parsing methods are realized by using backtrack algorithms. They are similar to the top-down parsing methods. But the backtrack steps make the parser very slow. Therefore we only deal with grammars such that have parsing methods without backtracks.
Hence forward we produce a very efficient algorithm for a large class of context-free grammars. This class contains the grammars for the programming languages.
The parsing is called  parsing; the grammar is called
parsing; the grammar is called  grammar.
grammar.  means the “Left to Right” method, and
means the “Left to Right” method, and  means that if we look ahead
means that if we look ahead  symbols then we can determine the handles of the sentential forms. The
symbols then we can determine the handles of the sentential forms. The  parsing method is a shift-reduce method.
parsing method is a shift-reduce method.
We deal with  parsing only, since for all
parsing only, since for all 
 grammar there is an equivalent
grammar there is an equivalent  grammar. This fact is very important for us since, using this type of
grammars, it is enough to look ahead one symbol in all cases.
grammar. This fact is very important for us since, using this type of
grammars, it is enough to look ahead one symbol in all cases.
Creating  parsers is not an easy task. However, there are such standard programs (for example the
parsers is not an easy task. However, there are such standard programs (for example the yacc
in UNIX systems), that create the complete parsing program from the
derivation rules of a grammar. Using these programs the task of writing
parsers is not too hard.
After studying the  grammars we will deal with the
grammars we will deal with the  parsing method. This method is used in the compilers of modern programming languages.
parsing method. This method is used in the compilers of modern programming languages.
 grammars.
grammars.As we did previously, we write a mark # to the right end of the text to be analysed. We introduce a new nonterminal symbol  and a new rule
and a new rule  into the grammar.
into the grammar.
Definition 2.14 Let  be the augmented grammar belongs to grammar
be the augmented grammar belongs to grammar  , where
, where  augmented grammar
augmented grammar

Assign serial numbers to the derivation rules of grammar, and let  be the 0th rule. Using this numbering, if we apply the 0th rule, it
means that the parsing process is concluded and the text is correct.
be the 0th rule. Using this numbering, if we apply the 0th rule, it
means that the parsing process is concluded and the text is correct.
We notice that if the original start symbol  does not happen on the right side of any rules, then there is no need
for this augmentation. However, for the sake of generality, we deal
with augmented grammars only.
does not happen on the right side of any rules, then there is no need
for this augmentation. However, for the sake of generality, we deal
with augmented grammars only.
Definition 2.15 The augmented grammar  is an LR(k) grammar
is an LR(k) grammar  , if for derivations
, if for derivations
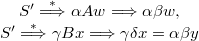
( ) the equality
) the equality

implies

The feature of  grammars is that, in the sentential form
grammars is that, in the sentential form  , looking ahead
, looking ahead  symbol from
symbol from  unambiguously decides if
unambiguously decides if  is or is not the handle. If the handle is
is or is not the handle. If the handle is  , then we have to reduce the form using the rule
, then we have to reduce the form using the rule  , that results the new sentential form is
, that results the new sentential form is  . Its reason is the following: suppose that, for sentential forms
. Its reason is the following: suppose that, for sentential forms  and
and  , (their prefixes
, (their prefixes  are same),
are same),  , and we can reduce
, and we can reduce  to
to  and
and  to
to  . In this case, since the grammar is a
. In this case, since the grammar is a  grammar,
grammar,  and
and  hold. Therefore in this case either the handle is
hold. Therefore in this case either the handle is  or
or  never is the handle.
never is the handle.
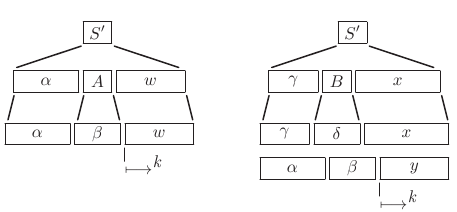
Example 2.11 Let  be a grammar and let the derivation rules be as follows.
be a grammar and let the derivation rules be as follows.


This grammar is not an  grammar, since using notations of the definition, in the derivations
grammar, since using notations of the definition, in the derivations
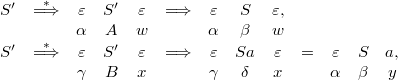
it holds that  , and
, and  .
.
Example 2.12 The next grammar is a  grammar.
grammar.  , the derivation rules are:
, the derivation rules are:

 .
.
In the next example we show that there is a context-free grammar, such that is not  grammar for any
grammar for any 
 .
.
Example 2.13 Let  be a grammar and let the derivation rules be
be a grammar and let the derivation rules be


Now for all 



and

but

It is not sure that, for a 
 grammar, we can find an equivalent
grammar, we can find an equivalent  grammar. However,
grammar. However,  grammars have this nice property.
grammars have this nice property.
Theorem 2.16 For all 
 grammar there is an equivalent
grammar there is an equivalent  grammar.
grammar.
The great significance of this theorem is that it makes sufficient to study the  grammars instead of
grammars instead of 
 grammars.
grammars.
 canonical sets.
canonical sets. Now we define a very important notion of the  parsings.
parsings.
Definition 2.17 If  is the handle of the
is the handle of the  (
( ) sentential form, then the prefixes of
) sentential form, then the prefixes of  are the viable prefixes of
are the viable prefixes of  .
.
Example 2.14 Let  be a grammar and the derivation rule as follows.
be a grammar and the derivation rule as follows.





 is a sentential form, and the first
is a sentential form, and the first  is the handle. The viable prefixes of this sentential form are
is the handle. The viable prefixes of this sentential form are  .
.
By the above definition, symbols after the handle are not parts of any viable prefix. Hence the task of finding the handle is the task of finding the longest viable prefix.
For a given grammar, the set of viable prefixes is determined, but it is obvious that the size of this set is not always finite.
The significance of viable prefixes are the following. We can assign states of a deterministic finite automaton to viable prefixes, and we can assign state transitions to the symbols of the grammar. From the initial state we go to a state along the symbols of a viable prefix. Using this property, we will give a method to create an automaton that executes the task of parsing.
Definition 2.18 If  is a rule of a
is a rule of a  grammar, then let
grammar, then let

be a LR(1)-item, where  is the core of the
is the core of the  -item, and
-item, and  is the lookahead symbol of the
is the lookahead symbol of the  -item.
-item.
![The \left[A\rightarrow\alpha.\beta,a\right] LR(1) -item.](VOLUME1_KONV-Firefox_elemei/fig_013.png)
The lookahead symbol is instrumental in reduction, i.e. it has form  . It means that we can execute reduction only if the symbol
. It means that we can execute reduction only if the symbol  follows the handle
follows the handle  .
.
Definition 2.19 The  -item
-item  is valid for the viable prefix
is valid for the viable prefix  if
if

and  is the first symbol of
is the first symbol of  or if
or if  then
then  .
.
Example 2.15 Let  a grammar and the derivation rules as follows.
a grammar and the derivation rules as follows.




Using these rules, we can derive  . Here
. Here  is a viable prefix, and
is a viable prefix, and  is valid for this viable prefix. Similarly,
is valid for this viable prefix. Similarly,  , and
, and  -item
-item  is valid for viable prefix
is valid for viable prefix  .
.
Creating a  parser, we construct the canonical sets of
parser, we construct the canonical sets of  -items. To achieve this we have to define the closure and read functions.
-items. To achieve this we have to define the closure and read functions.
Definition 2.20 Let the set  be a set of
be a set of  -items for a given grammar. The set closure(
-items for a given grammar. The set closure( ) consists of the next
) consists of the next  -items:
-items:
1. every element of the set  is an element of the set
is an element of the set  ,
,
2. if  , and
, and  is a derivation rule of the grammar, then
is a derivation rule of the grammar, then  for all
for all  ,
,
3. the set  is needed to expand using the step 2 until no more items can be added to it.
is needed to expand using the step 2 until no more items can be added to it.
By definitions, if the  -item
-item  is valid for the viable prefix
is valid for the viable prefix  , then the
, then the  -item
-item  is valid for the same viable prefix in the case of
is valid for the same viable prefix in the case of  . (Figure 2.14). It is obvious that the function closure creates all of
. (Figure 2.14). It is obvious that the function closure creates all of  -items which are valid for viable prefix
-items which are valid for viable prefix  .
.
![The function closure(\left[A\rightarrow\alpha.B\beta,a\right]) .](VOLUME1_KONV-Firefox_elemei/fig_019.png)
We can define the function  , i.e. the closure of set
, i.e. the closure of set  by the following algorithm. The result of this algorithm is the set
by the following algorithm. The result of this algorithm is the set  .
.
Closure-Set-of-Items(
)
12
FORall
-item 3
DO4
RETURN
Closure-Item(
)
12
IFthe-item
has form
3
THEN4
5
REPEAT6FORfor allwhich have form
7
DOFORfor all rules8
DOFORfor all symbols9
DO10
11
IF12
THEN13
14
UNTIL15
RETURN
The algorithm CLOSURE-ITEM creates  , the closure of item
, the closure of item  . If, in the argument
. If, in the argument  , the “point” is followed by a terminal symbol, then the result is this item only (line 1). If in
, the “point” is followed by a terminal symbol, then the result is this item only (line 1). If in  the “point” is followed by a nonterminal symbol
the “point” is followed by a nonterminal symbol  , then we can create new items from every rule having the symbol
, then we can create new items from every rule having the symbol  at their left side (line 9). We have to check this condition for all new items, too, the
at their left side (line 9). We have to check this condition for all new items, too, the rEPEAT cycle is in line 5–14. These steps are executed until no more items can be added (line 14). The set  contains the items to be checked, the set
contains the items to be checked, the set  contains the new items. We can find the operation
contains the new items. We can find the operation  in line 10.
in line 10.
Definition 2.21 Let  be a set of
be a set of  -items for the grammar
-items for the grammar  . Then the set read(
. Then the set read( ) (
) ( ) consists of the following
) consists of the following  -items.
-items.
1. if  , then all items of the set
, then all items of the set  are in
are in  ,
,
2. the set  is extended using step 1 until no more items can be added to it.
is extended using step 1 until no more items can be added to it.
The function  “reads symbol
“reads symbol  ” in items of
” in items of  , and after this operation the sign "point" in the items gets to the right side of
, and after this operation the sign "point" in the items gets to the right side of  . If the set
. If the set  contains the valid
contains the valid  -items for the viable prefix
-items for the viable prefix  then the set
then the set  contains the valid
contains the valid  -items for the viable prefix
-items for the viable prefix  .
.
The algorithm READ-SET-OF-ITEMS executes the function read. The result is the set  .
.
Read-Set(
)
12
FORall3
DO4
RETURN
Read-Item(
)
1IFand
2
THEN3
ELSE4
RETURN
Using these algorithms we can create all of items which writes the state after reading of symbol  .
.
Now we introduce the following notation for  -items, to give shorter descriptions. Let
-items, to give shorter descriptions. Let

be a notation for items

Example 2.16 The  -item
-item  is an item of the grammar in the example 2.15. For this item
is an item of the grammar in the example 2.15. For this item

We can create the canonical sets of  -items or shortly the
-items or shortly the  -canonical sets with the following method.
-canonical sets with the following method.
Definition 2.22 Canonical sets of  -items
-items  are the following.
are the following.

 ,
,
 Create the set
Create the set  for a symbol
for a symbol  . If this set is not empty and it is not equal to canonical set
. If this set is not empty and it is not equal to canonical set  then it is the next canonical set
then it is the next canonical set  .
.
Repeat this operation for all possible terminal and nonterminal symbol  .
If we get a nonempty set which is not equal to any of previous sets
then this set is a new canonical set, and its index is greater by one
as the maximal index of previously generated canonical sets.
.
If we get a nonempty set which is not equal to any of previous sets
then this set is a new canonical set, and its index is greater by one
as the maximal index of previously generated canonical sets.
 repeat the above operation for all previously generated canonical sets
and for all symbols of the grammar until no more items can be added to
it.
repeat the above operation for all previously generated canonical sets
and for all symbols of the grammar until no more items can be added to
it.
The sets

are the canonical sets of  -items of the grammar
-items of the grammar  .
.
The number of elements of  -items for a grammar is finite, hence the above method is terminated in finite time.
-items for a grammar is finite, hence the above method is terminated in finite time.
The next algorithm creates canonical sets of the grammar  .
.
Create-Canonical-Sets(
)
12
3
4
REPEAT56
FORall-re 7
DO8
FORall-re 9
DO10
IFand
11
THEN12
13
14
15
UNTIL16
RETURN
The result of the algorithm is  . The first canonical set is the set
. The first canonical set is the set  in the line 2. Further canonical sets are created by functions
in the line 2. Further canonical sets are created by functions CLOSURE-SET-OF-ITEMS(READ-SET)
in the line 9. The program in the line 10 checks that the new set
differs from previous sets, and if the answer is true then this set
will be a new set in lines 11–12. The fOR cycle in lines 6–14 guarantees that these operations are executed for all sets previously generated. In lines 3–14 the rEPEAT cycle generate new canonical sets as long as it is possible.
Example 2.17 The canonical sets of  -items for the Example 2.15 are as follows.
-items for the Example 2.15 are as follows.
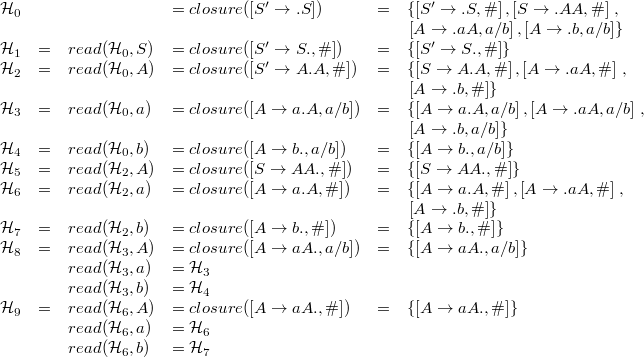
The automaton of the parser is in Figure 2.15.
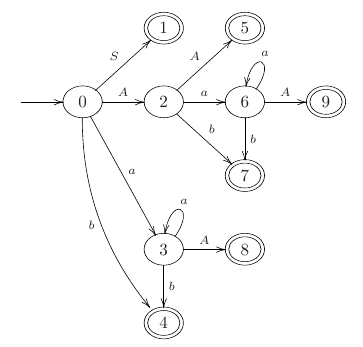
 parser.
parser. If the canonical sets of  -items
-items

were created, then assign the state  of an automaton to the set
of an automaton to the set  . Relation between the states of the automaton and the canonical sets of
. Relation between the states of the automaton and the canonical sets of  -items is stated by the next theorem. This theorem is the ”great”' theorem of the
-items is stated by the next theorem. This theorem is the ”great”' theorem of the  -parsing.
-parsing.
Theorem 2.23 The set of the  -items being valid for a viable prefix
-items being valid for a viable prefix  can be assigned to the automaton-state
can be assigned to the automaton-state  such that there is path from the initial state to state
such that there is path from the initial state to state  labeled by
labeled by  .
.
This theorem states that we can create the automaton of the parser using canonical sets. Now we give a method to create this  parser from canonical sets of
parser from canonical sets of  -items.
-items.
The deterministic finite automaton can be described with a table, that is called  parsing table. The rows of the table are assigned to the states of the automaton.
parsing table. The rows of the table are assigned to the states of the automaton.
The parsing table has two parts. The first is the action table. Since the operations of parser are determined by the symbols of analysed text, the action table is divided into columns labeled by the terminal symbols. The action
table contains information about the action performing at the given
state and at the given symbol. These actions can be shifts or
reductions. The sign of a shift operation is  , where
, where  is the next state. The sign of the reduction is
is the next state. The sign of the reduction is  , where
, where  is the serial number of the applied rule. The reduction by the rule
having the serial number zero means the termination of the parsing and
that the parsed text is syntactically correct; for this reason we call
this operation accept.
is the serial number of the applied rule. The reduction by the rule
having the serial number zero means the termination of the parsing and
that the parsed text is syntactically correct; for this reason we call
this operation accept.
The second part of the parsing table is the goto table. In this table are informations about shifts caused by nonterminals. (Shifts belong to terminals are in the action table.)
Let  be the set of states of the automata. The
be the set of states of the automata. The  -th row of the table is filled in from the
-th row of the table is filled in from the  -items of canonical set
-items of canonical set  .
.
The  -th row of the action table:
-th row of the action table:
-
if
 and
and  then
then  ,
, -
if
 and
and  , then
, then  , where
, where  is the
is the  -th rule of the grammar,
-th rule of the grammar, -
if
 , then
, then  .
.
The method of filling in the goto table:
-
if
 , then
, then  .
. -
In both table we have to write the text error into the empty positions.
These action and goto tables are called canonical parsing tables.
Theorem 2.24 The augmented grammar  is
is  grammar iff we can fill in the parsing tables created for this grammar without conflicts.
grammar iff we can fill in the parsing tables created for this grammar without conflicts.
We can fill in the parsing tables with the next algorithm.
Fill-in-LR(1)-Table(
)
1FORall LR(1) canonical sets2
DOFORall LR(1)-items 3IFand
4
THEN5
IFand
and
the
-th rule 6
THEN7
IF8
THEN9
IF10
THEN11
FORall12
DOIF“empty” 13
THEN14
FORall15
DOIF”empty” 16
THEN17
RETURNaction, goto
We fill in the tables its line-by-line. In lines 2–6 of the algorithm we fill in the action table, in lines 9–10 we fill in the goto table. In lines 11–13 we write the error into the positions which remained empty.
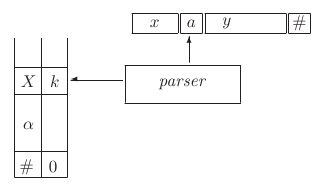
Now we deal with the steps of the  parsing. (Figure 2.16).
parsing. (Figure 2.16).
The state of the parsing is written by configurations. A configuration of the  parser consists of two parts, the first is the stack and the second is the unexpended input text.
parser consists of two parts, the first is the stack and the second is the unexpended input text.
The stack of the parsing is a double stack, we write or read two data with the operations push or pop.
The stack consists of pairs of symbols, the first element of pairs
there is a terminal or nonterminal symbol, and the second element is
the serial number of the state of automaton. The content of the start
state is  .
.
The start configuration is  , where
, where  means the unexpected text.
means the unexpected text.
The parsing is successful if the parser moves to final state. In the final state the content of the stack is  , and the parser is at the end of the text.
, and the parser is at the end of the text.
Suppose that the parser is in the configuration  . The next move of the parser is determined by
. The next move of the parser is determined by  .
.
State transitions are the following.
-
If
 , i.e. the parser executes a shift, then the actual symbol
, i.e. the parser executes a shift, then the actual symbol  and the new state
and the new state  are written into the stack. That is, the new configuration is
are written into the stack. That is, the new configuration is -
If
 , then we execute a reduction by the
, then we execute a reduction by the  -th rule
-th rule  . In this step we delete
. In this step we delete  rows, i.e. we delete
rows, i.e. we delete  elements from the stack, and then we determine the new state using the goto table. If after the deletion there is the state
elements from the stack, and then we determine the new state using the goto table. If after the deletion there is the state  at the top of the stack, then the new state is
at the top of the stack, then the new state is  .
. where
 .
. -
If
 , then the parsing is completed, and the analysed text was correct.
, then the parsing is completed, and the analysed text was correct. -
If
 , then the parsing terminates, and a syntactic error was discovered at the symbol
, then the parsing terminates, and a syntactic error was discovered at the symbol  .
.


The  parser is often named canonical
parser is often named canonical  parser.
parser.
Denote the action and goto tables together by  . We can give the following algorithm for the steps of parser.
. We can give the following algorithm for the steps of parser.
LR(1)-Parser(
)
1,
2
REPEAT34
IF5
THEN6
ELSEIFand
is the
-th rule and 7
and
8
THEN9
ELSEIF10
THEN11
ELSE12
UNTIL
OR13
RETURN
The input parameters of the algorithm are the text  and table
and table  . The variable
. The variable  indicates the action of the parser. It has value parsing in the intermediate states, and its value is O.K. or ERROR at the final states. In line 3 we detail the configuration of the parser, that is necessary at lines 6–8. Using the action table, the parser determines its move from the symbol
indicates the action of the parser. It has value parsing in the intermediate states, and its value is O.K. or ERROR at the final states. In line 3 we detail the configuration of the parser, that is necessary at lines 6–8. Using the action table, the parser determines its move from the symbol  at the top of the stack and from the actual symbol
at the top of the stack and from the actual symbol  .
In lines 4–5 we execute a shift step, in lines 6–8 a reduction. The
algorithm is completed in lines 9–11. At this moment, if the parser is
at the end of text and the state 0 is at the top of stack, then the
text is correct, otherwise a syntax error was detected. According to
this, the output of the algorithm is O.K. or ERROR,
and the final configuration is at the output, too. In the case of
error, the first symbol of the second element of the configuration is
the erroneous symbol.
.
In lines 4–5 we execute a shift step, in lines 6–8 a reduction. The
algorithm is completed in lines 9–11. At this moment, if the parser is
at the end of text and the state 0 is at the top of stack, then the
text is correct, otherwise a syntax error was detected. According to
this, the output of the algorithm is O.K. or ERROR,
and the final configuration is at the output, too. In the case of
error, the first symbol of the second element of the configuration is
the erroneous symbol.
Example 2.18 The action and goto tables of the  parser for the grammar of Example 2.15 are as follows. The empty positions denote errors.
parser for the grammar of Example 2.15 are as follows. The empty positions denote errors.
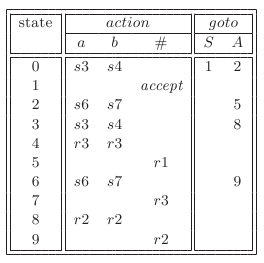
Example 2.19 Using the tables of the previous example, analyse the text  .
.
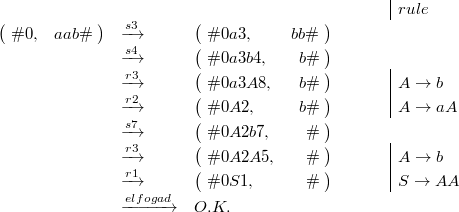
The syntax tree of the sentence is in Figure 2.11.
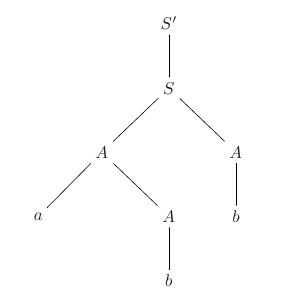
 parser.
parser.Our goal is to decrease the number of states of the parser, since
not only the size but the speed of the compiler is dependent on the
number of states. At the same time, we wish not to cut radically the
set of  grammars and languages, by using our new method.
grammars and languages, by using our new method.
There are a lot of  -items
in the canonical sets, such that are very similar: their core are the
same, only their lookahead symbols are different. If there are two or
more canonical sets in which there are similar items only, then we
merge these sets.
-items
in the canonical sets, such that are very similar: their core are the
same, only their lookahead symbols are different. If there are two or
more canonical sets in which there are similar items only, then we
merge these sets.
If the canonical sets  és a
és a  are mergeable, then let
are mergeable, then let  .
.
Execute all of possible merging of  canonical sets. After renumbering the indexes we obtain sets
canonical sets. After renumbering the indexes we obtain sets  ; these are the merged
; these are the merged  canonical sets or
canonical sets or  canonical sets.
canonical sets.
We create the  parser from these united canonical sets.
parser from these united canonical sets.
Example 2.20 Using the  canonical sets of the example 2.17, we can merge the next canonical sets:
canonical sets of the example 2.17, we can merge the next canonical sets:
 and
and  ,
,
 and
and  ,
,
 and
and  .
.
In the Figure 2.15 it can be seen that mergeable sets are in equivalent or similar positions in the automaton.
There is no difficulty with the function read if we use merged canonical sets. If


and

then

We can prove this on the following way. By the definition of function read, the set  depends on the core of
depends on the core of  -items in
-items in  only, and it is independent of the lookahead symbols. Since the cores of
only, and it is independent of the lookahead symbols. Since the cores of  -items in the sets
-items in the sets  are the same, the cores of
are the same, the cores of  -items of
-items of

are also the same. It follows that these sets are mergeable into a set  , thus
, thus  .
.
However, after merging canonical sets of  -items, elements of this set can raise difficulties. Suppose that
-items, elements of this set can raise difficulties. Suppose that  .
.
-
After merging there are not shift-shift conflicts. If
and
then there is a shift for the symbol
 and we saw that the function read does not cause problem, i.e. the set
and we saw that the function read does not cause problem, i.e. the set  is equal to the set
is equal to the set  .
. -
If there is an item
in the canonical set
 and there is an item
and there is an item in the set a
 , then the merged set is an inadequate set with the symbol
, then the merged set is an inadequate set with the symbol  , i.e. there is a shift-reduce conflict in the merged set.
, i.e. there is a shift-reduce conflict in the merged set. But this case never happens. Both items are elements of the set
 and of the set
and of the set  . These sets are mergeable sets, thus they are different in lookahead symbols only. It follows that there is an item
. These sets are mergeable sets, thus they are different in lookahead symbols only. It follows that there is an item  in the set
in the set  . Using the Theorem 2.24 we get that the grammar is not a
. Using the Theorem 2.24 we get that the grammar is not a  grammar; we get shift-reduce conflict from the set
grammar; we get shift-reduce conflict from the set  for the
for the  parser, too.
parser, too. -
However, after merging reduce-reduce conflict may arise. The properties of
 grammar do not exclude this case. In the next example we show such a case.
grammar do not exclude this case. In the next example we show such a case.




Example 2.21 Let  be a grammar, and the derivation rules are as follows.
be a grammar, and the derivation rules are as follows.




This grammar is a  grammar. For the viable prefix
grammar. For the viable prefix  the
the  -items
-items

for the viable prefix  the
the  -items
-items

create two canonical sets.
After merging these two sets we get a reduce-reduce conflict. If the input symbol is  or
or  then the handle is
then the handle is  , but we cannot decide that if we have to use the rule
, but we cannot decide that if we have to use the rule  or the rule
or the rule  for reducing.
for reducing.
Now we give the method for creating a  parsing table. First we give the canonical sets of
parsing table. First we give the canonical sets of  -items
-items

then we merge canonical sets in which the sets constructed from the core of the items are identical ones. Let

be the  canonical sets.
canonical sets.
For the calculation of the size of the action and goto tables and for filling in these tables we use the sets 
 . The method is the same as it was in the
. The method is the same as it was in the  parsers. The constructed tables are named by
parsers. The constructed tables are named by  parsing tables.
parsing tables.
Definition 2.25 If the filling in the  parsing tables do not produce conflicts then the grammar is said to be an
parsing tables do not produce conflicts then the grammar is said to be an  grammar.
grammar.
The run of  parser is the same as it was in
parser is the same as it was in  parser.
parser.
Example 2.22 Denote the result of merging canonical sets  and
and  by
by  . Let
. Let  be the state which belonging to this set.
be the state which belonging to this set.
The  canonical sets of the grammar of Example 2.15 were given in the Example2.17 and the mergeable sets were seen in the example 2.20. For this grammar we can create the next
canonical sets of the grammar of Example 2.15 were given in the Example2.17 and the mergeable sets were seen in the example 2.20. For this grammar we can create the next  parsing tables.
parsing tables.
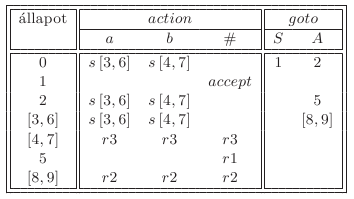
The filling in the  tables are conflict free, therefore the grammar is an
tables are conflict free, therefore the grammar is an  grammar. The automaton of this parser is in Figure 2.18.
grammar. The automaton of this parser is in Figure 2.18.
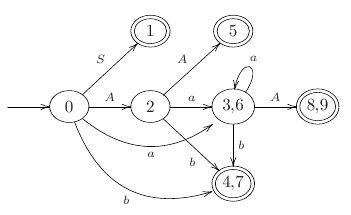
Example 2.23 Analyse the text  using the parsing table of the previous example.
using the parsing table of the previous example.
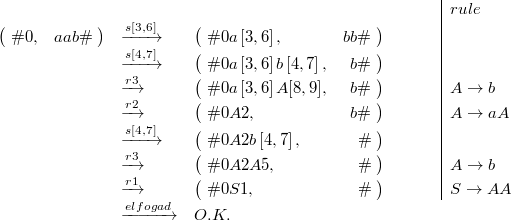
The syntax tree of the parsed text is in the Figure 2.17.
As it can be seen from the previous example, the  grammars are
grammars are  grammars. The converse assertion is not true. In Example 2.21 there is a grammar which is
grammars. The converse assertion is not true. In Example 2.21 there is a grammar which is  , but it is not
, but it is not  grammar.
grammar.
Programming languages can be written by  grammars. The most frequently used methods in compilers of programming languages is the
grammars. The most frequently used methods in compilers of programming languages is the  method. The advantage of the
method. The advantage of the  parser is that the sizes of parsing tables are smaller than the size of
parser is that the sizes of parsing tables are smaller than the size of  parsing tables.
parsing tables.
For example, the  parsing tables for the Pascal language have a few hundreds of lines, whilst the
parsing tables for the Pascal language have a few hundreds of lines, whilst the  parsers for this language have a few thousands of lines.
parsers for this language have a few thousands of lines.
Exercises
2.3-1 Find the  grammars among the following grammars (we give their derivation rules only).
grammars among the following grammars (we give their derivation rules only).
1. 
2. 
3. 
4. 
2.3-2 Prove that the next grammars are  grammars (we give their derivation rules only).
grammars (we give their derivation rules only).
1. 
2. 
3. 
2.3-3 Prove that the next grammars are not  grammars (we give their derivation rules only).
grammars (we give their derivation rules only).
1. 
2. 
3. 
2.3-4 Show that a  language has only one sentence.
language has only one sentence.
2.3-5 Prove that the next grammars are  grammars (we give their derivation rules only).
grammars (we give their derivation rules only).
1. 
2. 
2.3-6 Prove that the next grammars are  grammars. (we give their derivation rules only).
grammars. (we give their derivation rules only).
1 . 
2. 
2.3-7 Prove that the next grammars are not  grammars for any
grammars for any  (we give their derivation rules only).
(we give their derivation rules only).
1. 
2. 
2.3-8 Prove that the next grammars are  but are not
but are not  grammars (we give their derivation rules only).
grammars (we give their derivation rules only).
1. 
2. 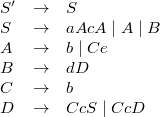
2.3-9 Create parsing table for the above  grammars.
grammars.
2.3-10 Using the recursive descent method, write the parsing program for the above  grammars.
grammars.
2.3-11 Create canonical sets and the parsing tables for the above  grammars.
grammars.
2.3-12 Create merged canonical sets and the parsing tables for the above  grammars.
grammars.
PROBLEMS |
2-1 Lexical analysis of a program text
The algorithm LEX-ANALYSE in Section 2.2 gives a scanner for the text that is described by only one
regular expression or deterministic finite automaton, i.e. this scanner
is able to analyse only one symbol. Create an automaton which executes
total lexical analysis of a program language, and give the algorithm LEX-ANALYSE-LANGUAGE
for this automaton. Let the input of the algorithm be the text of a
program, and the output be the series of symbols. It is obvious that if
the automaton goes into a finite state then its new work begins at the
initial state, for analysing the next symbol. The algorithm finishes
his work if it is at the end of the text or a lexical error is detected.
2-2 Series of symbols augmented with data of symbols
Modify the algorithm of the previous task on such way that the output is the series of symbols augmented with the appropriate attributes. For example, the attribute of a variable is the character string of its name, or the attribute of a number is its value and type. It is practical to write pointers to the symbols in places of data.
2-3 
parser from 
canonical sets
If we omit lookahead symbols from the  -items then we get
-items then we get  -items. We can define functions closure and read for
-items. We can define functions closure and read for  -items too, doing not care for lookahead symbols. Using a method similar to the method of
-items too, doing not care for lookahead symbols. Using a method similar to the method of  , we can construct
, we can construct  canonical sets
canonical sets

One can observe that the number of merged canonical sets is equal to the number of  canonical sets, since the cores of
canonical sets, since the cores of  -items of the merged canonical sets are the same as the items of the
-items of the merged canonical sets are the same as the items of the  canonical sets. Therefore the number of states of
canonical sets. Therefore the number of states of  parser is equal to the number of states of its
parser is equal to the number of states of its  parser.
parser.
Using this property, we can construct  canonical sets from
canonical sets from  canonical sets, by completing the items of the
canonical sets, by completing the items of the  canonical sets with lookahead symbols. The result of this procedure is the set of
canonical sets with lookahead symbols. The result of this procedure is the set of  canonical sets.
canonical sets.
It is obvious that the right part of an  -item
begins with symbol point only if this item was constructed by the
function closure. (We notice that there is one exception, the
-item
begins with symbol point only if this item was constructed by the
function closure. (We notice that there is one exception, the  item of the canonical set
item of the canonical set  .) Therefore it is no need for all items of
.) Therefore it is no need for all items of  canonical sets. Let the kernel of the canonical set
canonical sets. Let the kernel of the canonical set  be the
be the  -item
-item  , and let the kernel of any other canonical set be the set of the
, and let the kernel of any other canonical set be the set of the  -items such that there is no point at the first position on the right side of the item. We give an
-items such that there is no point at the first position on the right side of the item. We give an  canonical set by its kernel, since all of items can be construct from the kernel using the function closure.
canonical set by its kernel, since all of items can be construct from the kernel using the function closure.
If we complete the items of the kernel of  canonical sets then we get the kernel of the merged
canonical sets then we get the kernel of the merged  canonical sets. That is, if the kernel of an
canonical sets. That is, if the kernel of an  canonical set is
canonical set is  , then from it with completions we get the kernel of the
, then from it with completions we get the kernel of the  canonical set,
canonical set,  .
.
If we know  then we can construct
then we can construct  easily. If
easily. If  ,
,  and
and  , then
, then  . For
. For  -items, if
-items, if  ,
,  and
and  then we have to determine also the lookahead symbols, i.e. the symbols
then we have to determine also the lookahead symbols, i.e. the symbols  such that
such that  .
.
If  and
and  then it is sure that
then it is sure that  . In this case, we say that the lookahead symbol was spontaneously generated for this item of canonical set
. In this case, we say that the lookahead symbol was spontaneously generated for this item of canonical set  . The symbol
. The symbol  do not play important role in the construction of the lookahead symbol.
do not play important role in the construction of the lookahead symbol.
If  then
then  is an element of the set
is an element of the set  , and the lookahead symbol is
, and the lookahead symbol is  . In this case we say that the lookahead symbol is propagated from
. In this case we say that the lookahead symbol is propagated from  into the item of the set
into the item of the set  .
.
If the kernel  of an
of an  canonical set is given then we construct the propagated and spontaneously generated lookahead symbols for items of
canonical set is given then we construct the propagated and spontaneously generated lookahead symbols for items of  by the following algorithm.
by the following algorithm.
For all items  we construct the set
we construct the set  , where
, where  is a dummy symbol,
is a dummy symbol,
-
if
 and
and  then
then  and the symbol
and the symbol  is spontaneously generated into the item of the set
is spontaneously generated into the item of the set  ,
, -
if
 then
then  , and the symbol
, and the symbol  is propagated from
is propagated from  into the item of the set
into the item of the set  .
.
The kernel of the canonical set  has only one element. The core of this element is
has only one element. The core of this element is  . For this item we can give the lookahead symbol
. For this item we can give the lookahead symbol  directly. Since the core of the kernel of all
directly. Since the core of the kernel of all  canonical sets are given, using the above method we can calculate all of propagated and spontaneously generated symbols.
canonical sets are given, using the above method we can calculate all of propagated and spontaneously generated symbols.
Give the algorithm which constructs  canonical sets from
canonical sets from  canonical sets using the methods of propagation and spontaneously generation.
canonical sets using the methods of propagation and spontaneously generation.
CHAPTER NOTES |
The theory and practice of compilers, computers and program languages are of the same age. The construction of first compilers date back to the 1950's. The task of writing compilers was a very hard task at that time, the first Fortran compiler took 18 man-years to implement [6]. From that time more and more precise definitions and solutions have been given to the problems of compilation, and better and better methods and utilities have been used in the construction of translators.
The development of formal languages and automata was a great leap forward, and we can say that this development was urged by the demand of writing of compilers. In our days this task is a simple routine project. New results, new discoveries are expected in the field of code optimisation only.
One of the earliest nondeterministic and backtrack algorithms
appeared in the 1960's. The first two dynamic programming algorithms
were the CYK (Cocke-Younger-Kasami) algorithm from 1965–67 and the
Earley-algorithm from 1965. The idea of precedence parsers is from the
end of 1970's and from the beginning of 1980's. The  grammars was defined by Knuth in 1965; the definition of
grammars was defined by Knuth in 1965; the definition of  grammars is dated from the beginning of 1970's.
grammars is dated from the beginning of 1970's.  grammars were studied by De Remer in 1971, the elaborating of
grammars were studied by De Remer in 1971, the elaborating of  parsing methods were finished in the beginning of 1980's [7][5][6].
parsing methods were finished in the beginning of 1980's [7][5][6].
To the middle of 1980's it became obvious that the  parsing methods are the real efficient methods and since than the
parsing methods are the real efficient methods and since than the  methods are used in compilers [7].
methods are used in compilers [7].
A lot of very excellent books deal with the theory and practice of
compiles. Perhaps the most successful of them was the book of Gries [100]; in this book there are interesting results for precedence grammars. The first successful book which wrote about the new  algorithms was of Aho and Ullman [5], we can find here also the CYK and the Early algorithms. It was followed by the “dragon book” of Aho and Ullman[6]; the extended and corrected issue of it was published in 1986 by authors Aho, Ullman and Sethi [7].
algorithms was of Aho and Ullman [5], we can find here also the CYK and the Early algorithms. It was followed by the “dragon book” of Aho and Ullman[6]; the extended and corrected issue of it was published in 1986 by authors Aho, Ullman and Sethi [7].
Without completeness we notice the books of Fischer and LeBlanc [74], Tremblay and Sorenson [258], Waite and Goos [267], Hunter [121], Pittman [206] and Mak [171]. Advanced achievements are in recently published books, among others in the book of Muchnick [189], Grune, Bal, Jacobs and Langendoen [102], in the book of Cooper and Torczon [52] and in a chapter of the book by Louden [169].
Table of Contents
Algorithms for data compression usually proceed as follows. They encode a text over some finite alphabet into a sequence of bits, hereby exploiting the fact that the letters of this alphabet occur with different frequencies. For instance, an “e” occurs more frequently than a “q” and will therefore be assigned a shorter codeword. The quality of the compression procedure is then measured in terms of the average codeword length.
So the underlying model is probabilistic, namely we consider a finite alphabet and a probability distribution on this alphabet, where the probability distribution reflects the (relative) frequencies of the letters. Such a pair—an alphabet with a probability distribution—is called a source. We shall first introduce some basic facts from Information Theory. Most important is the notion of entropy, since the source entropy characterises the achievable lower bounds for compressibility.
The source model to be best understood, is the discrete memoryless source. Here the letters occur independently of each other in the text. The use of prefix codes, in which no codeword is the beginning of another one, allows to compress the text down to the entropy of the source. We shall study this in detail. The lower bound is obtained via Kraft's inequality, the achievability is demonstrated by the use of Huffman codes, which can be shown to be optimal.
There are some assumptions on the discrete memoryless source, which are not fulfilled in most practical situations. Firstly, usually this source model is not realistic, since the letters do not occur independently in the text. Secondly, the probability distribution is not known in advance. So the coding algorithms should be universal for a whole class of probability distributions on the alphabet. The analysis of such universal coding techniques is much more involved than the analysis of the discrete memoryless source, such that we shall only present the algorithms and do not prove the quality of their performance. Universal coding techniques mainly fall into two classes.
Statistical coding techniques estimate the probability of the next letters as accurately as possible. This process is called modelling of the source. Having enough information about the probabilities, the text is encoded, where usually arithmetic coding is applied. Here the probability is represented by an interval and this interval will be encoded.
Dictionary-based algorithms store patterns, which occurred before in the text, in a dictionary and at the next occurrence of a pattern this is encoded via its position in the dictionary. The most prominent procedure of this kind is due to Ziv and Lempel.
We shall also present a third universal coding technique which falls in neither of these two classes. The algorithm due to Burrows and Wheeler has become quite prominent in recent years, since implementations based on it perform very well in practice.
All algorithms mentioned so far are lossless, i. e., there is no information lost after decoding. So the original text will be recovered without any errors. In contrast, there are lossy data compression techniques, where the text obtained after decoding does not completely coincide with the original text. Lossy compression algorithms are used in applications like image, sound, video, or speech compression. The loss should, of course, only marginally effect the quality. For instance, frequencies not realizable by the human eye or ear can be dropped. However, the understanding of such techniques requires a solid background in image, sound or speech processing, which would be far beyond the scope of this paper, such that we shall illustrate only the basic concepts behind image compression algorithms such as JPEG.
We emphasise here the recent developments such as the Burrows-Wheeler transform and the context–tree weighting method. Rigorous proofs will only be presented for the results on the discrete memoryless source which is best understood but not a very realistic source model in practice. However, it is also the basis for more complicated source models, where the calculations involve conditional probabilities. The asymptotic computational complexity of compression algorithms is often linear in the text length, since the algorithms simply parse through the text. However, the running time relevant for practical implementations is mostly determined by the constants as dictionary size in Ziv-Lempel coding or depth of the context tree, when arithmetic coding is applied. Further, an exact analysis or comparison of compression algorithms often heavily depends on the structure of the source or the type of file to be compressed, such that usually the performance of compression algorithms is tested on benchmark files. The most well-known collections of benchmark files are the Calgary Corpus and the Canterbury Corpus.
The source model discussed throughout this chapter is the Discrete Memoryless Source (DMS). Such a source is a pair  , where
, where  , is a finite alphabet and
, is a finite alphabet and  is a probability distribution on
is a probability distribution on  . A discrete memoryless source can also be described by a random variable
. A discrete memoryless source can also be described by a random variable  , where
, where  for all
for all  . A word
. A word  is the realization of the random variable
is the realization of the random variable  , where the
, where the  are identically distributed and independent of each other. So the probability
are identically distributed and independent of each other. So the probability  is the product of the probabilities of the single letters.
is the product of the probabilities of the single letters.
Estimations for the letter probabilities in natural languages are
obtained by statistical methods. If we consider the English language
and choose for  the latin alphabet with an additional symbol for Space and punctuation
marks, the probability distribution can be derived from the frequency
table in 3.1, which is obtained from the copy–fitting tables used by professional printers. So
the latin alphabet with an additional symbol for Space and punctuation
marks, the probability distribution can be derived from the frequency
table in 3.1, which is obtained from the copy–fitting tables used by professional printers. So  , etc.
, etc.
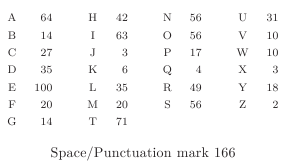
Observe
that this source model is often not realistic. For instance, in English
texts e.g. the combination `th' occurs more often than `ht'. This could
not be the case, if an English text was produced by a discrete
memoryless source, since then  .
.
In the discussion of the communication model it was pointed out that
the encoder wants to compress the original data into a short sequence
of binary digits, hereby using a binary code, i. e., a function  . To each element
. To each element  a codeword
a codeword  is assigned. The aim of the encoder is to minimise the average length
of the codewords. It turns out that the best possible data compression
can be described in terms of the entropy
is assigned. The aim of the encoder is to minimise the average length
of the codewords. It turns out that the best possible data compression
can be described in terms of the entropy  of the probability distribution
of the probability distribution  . The entropy is given by the formula
. The entropy is given by the formula

where the logarithm is to the base 2. We shall also use the notation  according to the interpretation of the source as a random variable.
according to the interpretation of the source as a random variable.
A code (of variable length) is a function  ,
,  . Here
. Here  is the set of codewords, where for
is the set of codewords, where for  the codeword is
the codeword is  where
where  denotes the length of
denotes the length of  , i. e., the number of bits used to present
, i. e., the number of bits used to present  .
.
A code  is uniquely decipherable (UDC), if every word in
is uniquely decipherable (UDC), if every word in  is representable by at most one sequence of codewords.
is representable by at most one sequence of codewords.
A code  is a prefix code, if no codeword is prefix of another one, i. e., for any two codewords
is a prefix code, if no codeword is prefix of another one, i. e., for any two codewords  and
and  ,
,  , with
, with  holds
holds  . So in at least one of the first
. So in at least one of the first  components
components  and
and  differ.
differ.
Messages encoded using a prefix code are uniquely decipherable. The
decoder proceeds by reading the next letter until a codeword  is formed. Since
is formed. Since  cannot be the beginning of another codeword, it must correspond to the letter
cannot be the beginning of another codeword, it must correspond to the letter  .
Now the decoder continues until another codeword is formed. The process
may be repeated until the end of the message. So after having found the
codeword
.
Now the decoder continues until another codeword is formed. The process
may be repeated until the end of the message. So after having found the
codeword  the decoder instantaneously knows that
the decoder instantaneously knows that  is the next letter of the message. Because of this property a prefix code is also denoted as instantaneous code.
is the next letter of the message. Because of this property a prefix code is also denoted as instantaneous code.
The criterion for data compression is to minimise the average length of the codewords. So if we are given a source  , where
, where  and
and  is a probability distribution on
is a probability distribution on  , the average length
, the average length  is defined by
is defined by

The following prefix code  for English texts has average length
for English texts has average length  .
.
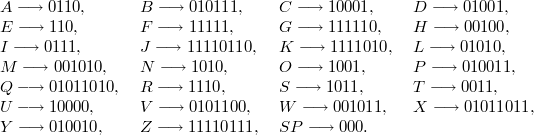
We can still do better, if we do not encode single letters, but blocks of  letters for some
letters for some  . In this case we replace the source
. In this case we replace the source  by
by  for some
for some  . Remember that
. Remember that  for a word
for a word  , since the source is memoryless. If e.g. we are given an alphabet with two letters,
, since the source is memoryless. If e.g. we are given an alphabet with two letters,  and
and  ,
,  , then the code
, then the code  defined by
defined by  ,
,  has average length
has average length  . Obviously we cannot find a better code. The combinations of two letters now have the following probabilities:
. Obviously we cannot find a better code. The combinations of two letters now have the following probabilities:

The prefix code  defined by
defined by

has average length  . So
. So  could be interpreted as the average length the code
could be interpreted as the average length the code  requires per letter of the alphabet
requires per letter of the alphabet  . When we encode blocks of
. When we encode blocks of  letters we are interested in the behaviour of
letters we are interested in the behaviour of

It follows from the Noiseless Coding Theorem, which is stated in the next section, that  the entropy of the source
the entropy of the source  .
.
In our example for the English language we have  . So the code presented above, where only single letters are encoded, is already nearly optimal in respect of
. So the code presented above, where only single letters are encoded, is already nearly optimal in respect of  . Further compression is possible, if we consider the dependencies between the letters.
. Further compression is possible, if we consider the dependencies between the letters.
We shall now introduce a necessary and sufficient condition for the existence of a prefix code with prescribed word lengths  .
.
Theorem 3.1 (Kraft's inequality) Let  . A uniquely decipherable code
. A uniquely decipherable code  with word lengths
with word lengths  exists, if and only if
exists, if and only if
Proof. The central idea is to interpret the codewords as nodes of a rooted binary tree with depth  . The tree is required to be complete (every path from the root to a leaf has length
. The tree is required to be complete (every path from the root to a leaf has length  ) and regular (every inner node has outdegree 2). The example in Figure 3.2 for
) and regular (every inner node has outdegree 2). The example in Figure 3.2 for  may serve as an illustration.
may serve as an illustration.
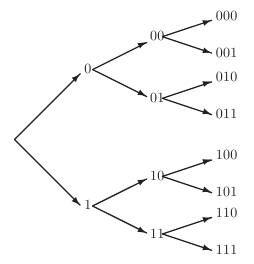
So the nodes with distance  from the root are labeled with the words
from the root are labeled with the words  . The upper successor of
. The upper successor of  is labeled
is labeled  , its lower successor is labeled
, its lower successor is labeled  .
.
The shadow of a node labeled by  is the set of all the leaves which are labeled by a word (of length
is the set of all the leaves which are labeled by a word (of length  ) beginning with
) beginning with  . In other words, the shadow of
. In other words, the shadow of  consists of the leaves labeled by a sequence with prefix
consists of the leaves labeled by a sequence with prefix  . In our example
. In our example  is the shadow of the node labeled by
is the shadow of the node labeled by  .
.
Now suppose we are given positive integers  . We further assume that
. We further assume that  . As first codeword
. As first codeword  is chosen. Since
is chosen. Since  , we have
, we have  (otherwise only one letter has to be encoded). Hence there are left some nodes on the
(otherwise only one letter has to be encoded). Hence there are left some nodes on the  level, which are not in the shadow of
level, which are not in the shadow of  . We pick the first of these remaining nodes and go back
. We pick the first of these remaining nodes and go back  steps in direction to the root. Since
steps in direction to the root. Since  we shall find a node labeled by a sequence of
we shall find a node labeled by a sequence of  bits, which is not a prefix of
bits, which is not a prefix of  . So we can choose this sequence as
. So we can choose this sequence as  . Now again, either
. Now again, either  , and we are ready, or by the hypothesis
, and we are ready, or by the hypothesis  and we can find a node on the
and we can find a node on the  level, which is not contained in the shadows of
level, which is not contained in the shadows of  and
and  . We find the next codeword as shown above. The process can be continued until all codewords are assigned.
. We find the next codeword as shown above. The process can be continued until all codewords are assigned.
Conversely, observe that  , where
, where  is the number of codewords with length
is the number of codewords with length  in the uniquely decipherable prefix code and
in the uniquely decipherable prefix code and  again denotes the maximal word length.
again denotes the maximal word length.
The  power of this term can be expanded as
power of this term can be expanded as
Here  is the total number of messages whose coded representation is of length
is the total number of messages whose coded representation is of length  .
.
Since the code is uniquely decipherable, to every sequence of  letters corresponds at most one possible message. Hence
letters corresponds at most one possible message. Hence  and
and  . Taking
. Taking  –th root this yields
–th root this yields  .
.
Since this inequality holds for any  and
and  , we have the desired result
, we have the desired result
Theorem 3.2 (Noiseless Coding Theorem) For a source  ,
,  it is always possible to find a uniquely decipherable code
it is always possible to find a uniquely decipherable code  with average length
with average length

Proof. Let  denote the codeword lengths of an optimal uniquely decipherable code. Now we define a probability distribution
denote the codeword lengths of an optimal uniquely decipherable code. Now we define a probability distribution  by
by  for
for  , where
, where  . By Kraft's inequality
. By Kraft's inequality  .
.
For two probability distributions  and
and  on
on  the I-divergence
the I-divergence  is defined by
is defined by
I-divergence is a good measure for the distance of two probability distributions. Especially, always the I-divergence  . So for any probability distribution
. So for any probability distribution 

From this it follows that

Since  ,
,  and hence
and hence  .
.
In order to prove the right-hand side of the Noiseless Coding Theorem for  we define
we define  . Observe that
. Observe that  and hence
and hence  .
.
So  and from Kraft's Inequality we know that there exists a uniquely decipherable code with word lengths
and from Kraft's Inequality we know that there exists a uniquely decipherable code with word lengths  . This code has average length
. This code has average length

In the proof of the Noiseless Coding Theorem it was explicitly shown how to construct a prefix code  to a given probability distribution
to a given probability distribution  . The idea was to assign to each
. The idea was to assign to each  a codeword of length
a codeword of length  by choosing an appropriate vertex in the tree introduced. However, this
procedure does not always yield an optimal code. If e.g. we are given
the probability distribution
by choosing an appropriate vertex in the tree introduced. However, this
procedure does not always yield an optimal code. If e.g. we are given
the probability distribution  , we would encode
, we would encode  ,
,  ,
,  and thus achieve an average codeword length
and thus achieve an average codeword length  . But the code with
. But the code with  ,
,  ,
,  has only average length
has only average length  .
.
Shannon gave an explicit procedure for obtaining codes with codeword lengths  using the binary representation of cumulative probabilities (Shannon
remarked this procedure was originally due to Fano). The elements of
the source are ordered according to increasing probabilities
using the binary representation of cumulative probabilities (Shannon
remarked this procedure was originally due to Fano). The elements of
the source are ordered according to increasing probabilities  . Then the codeword
. Then the codeword  consists of the first
consists of the first  bits of the binary expansion of the sum
bits of the binary expansion of the sum  . This procedure was further developed by Elias. The elements of the source now may occur in any order. The Shannon-Fano-Elias-code has as codewords
. This procedure was further developed by Elias. The elements of the source now may occur in any order. The Shannon-Fano-Elias-code has as codewords  the first
the first  bits of the binary expansion of the sum
bits of the binary expansion of the sum  .
.
We shall illustrate these procedures with the example in Figure 3.3.
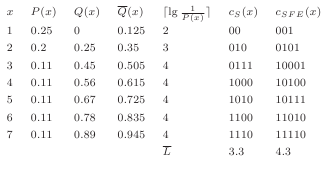
A more efficient procedure is also due to Shannon and Fano. The Shannon-Fano-algorithm will be illustrated by the same example in Figure 3.4.
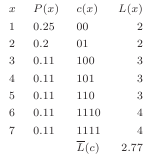
The
messages are first written in order of nonincreasing probabilities.
Then the message set is partitioned into two most equiprobable subsets  and
and  . A
. A  is assigned to each message contained in one subset and a
is assigned to each message contained in one subset and a  to each of the remaining messages. The same procedure is repeated for subsets of
to each of the remaining messages. The same procedure is repeated for subsets of  and
and  ; that is,
; that is,  will be partitioned into two subsets
will be partitioned into two subsets  and
and  . Now the code word corresponding to a message contained in
. Now the code word corresponding to a message contained in  will start with
will start with  and that corresponding to a message in
and that corresponding to a message in  will begin with
will begin with  . This procedure is continued until each subset contains only one message.
. This procedure is continued until each subset contains only one message.
However, this algorithm neither yields an optimal code in general, since the prefix code  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  has average length
has average length  .
.
The Huffman coding algorithm is a recursive procedure, which we shall illustrate with the same example as for the Shannon-Fano-algorithm in Figure 3.5 with  and
and  .
The source is successively reduced by one element. In each reduction
step we add up the two smallest probabilities and insert their sum
.
The source is successively reduced by one element. In each reduction
step we add up the two smallest probabilities and insert their sum  in the increasingly ordered sequence
in the increasingly ordered sequence  , thus obtaining a new probability distribution
, thus obtaining a new probability distribution  with
with  . Finally we arrive at a source with two elements ordered according to their probabilities. The first element is assigned a
. Finally we arrive at a source with two elements ordered according to their probabilities. The first element is assigned a  , the second element a
, the second element a  . Now we again “blow up” the source until the original source is restored. In each step
. Now we again “blow up” the source until the original source is restored. In each step  and
and  are obtained by appending
are obtained by appending  or
or  , respectively, to the codeword corresponding to
, respectively, to the codeword corresponding to  .
.
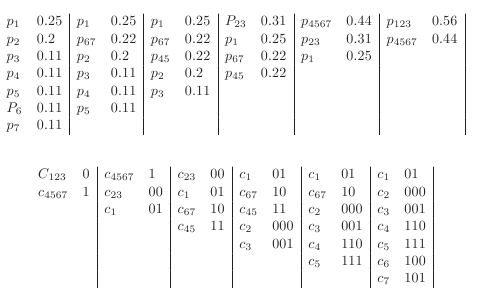
The following theorem demonstrates that the Huffman coding algorithm always yields a prefix code optimal with respect to the average codeword length.
Theorem 3.3 We are given a source  , where
, where  and the probabilities are ordered non–increasingly
and the probabilities are ordered non–increasingly  . A new probability distribution is defined by
. A new probability distribution is defined by

Let  be an optimal prefix code for
be an optimal prefix code for  . Now we define a code
. Now we define a code  for the distribution
for the distribution  by
by
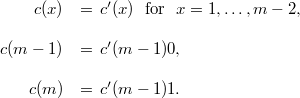
Then  is an optimal prefix code for
is an optimal prefix code for  and
and  , where
, where  denotes the length of an optimal prefix code for probability distribution
denotes the length of an optimal prefix code for probability distribution  .
.
Proof. For a probability distribution  on
on  with
with  there exists an optimal prefix code
there exists an optimal prefix code  with
with
i) 
ii) 
iii)  and
and  differ exactly in the last position.
differ exactly in the last position.
This holds, since:
i) Assume that there are  with
with  and
and  . Then the code
. Then the code  obtained by interchanging the codewords
obtained by interchanging the codewords  and
and  has average length
has average length  , since
, since

ii) Assume we are given a code with .  Because of the prefix property we may drop the last
Because of the prefix property we may drop the last  bits and thus obtain a new code with
bits and thus obtain a new code with  .
.
iii) If no two codewords of maximal length agree in all places but the last, then we may drop the last digit of all such codewords to obtain a better code.
Now we are ready to prove the statement from the theorem. From the definition of  and
and  we have
we have

Now let  be an optimal prefix code with the properties ii) and iii) from the preceding lemma. We define a prefix code
be an optimal prefix code with the properties ii) and iii) from the preceding lemma. We define a prefix code  for
for

by  for
for  and
and  is obtained by dropping the last bit of
is obtained by dropping the last bit of  or
or  .
.
Now

and hence  , since
, since  .
.
If  denotes the size of the source alphabet, the Huffman coding algorithm needs
denotes the size of the source alphabet, the Huffman coding algorithm needs  additions and
additions and  code modifications (appending
code modifications (appending  or
or  ). Further we need
). Further we need  insertions, such that the total complexity can be roughly estimated to be
insertions, such that the total complexity can be roughly estimated to be  .
However, observe that with the Noiseless Coding Theorem, the quality of
the compression rate can only be improved by jointly encoding blocks
of, say,
.
However, observe that with the Noiseless Coding Theorem, the quality of
the compression rate can only be improved by jointly encoding blocks
of, say,  letters, which would result in a Huffman code for the source
letters, which would result in a Huffman code for the source  of size
of size  . So, the price for better compression is a rather drastic increase in complexity. Further, the codewords for all
. So, the price for better compression is a rather drastic increase in complexity. Further, the codewords for all  letters have to be stored. Encoding a sequence of
letters have to be stored. Encoding a sequence of  letters can since be done in
letters can since be done in  steps.
steps.
Exercises
3.1-1 Show that the code  with
with  and
and  is uniquely decipherable but not instantaneous for any
is uniquely decipherable but not instantaneous for any  .
.
3.1-2 Compute the entropy of the source  , with
, with  and
and  .
.
3.1-3 Find the Huffman-codes and the Shannon-Fano-codes for the sources  with
with  as in the previous exercise for
as in the previous exercise for  and calculate their average codeword lengths.
and calculate their average codeword lengths.
3.1-4 Show that always  .
.
3.1-5 Show that the redundancy  of a prefix code
of a prefix code  for a source with probability distribution
for a source with probability distribution  can be expressed as a special I–divergence.
can be expressed as a special I–divergence.
3.1-6 Show that the I-divergence  for all probability distributions
for all probability distributions  and
and  over some alphabet
over some alphabet  with equality exactly if
with equality exactly if  but that the I-divergence is not a metric.
but that the I-divergence is not a metric.
In statistical coding techniques as Shannon-Fano- or Huffman-coding the probability distribution of the source is modelled as accurately as possible and then the words are encoded such that a higher probability results in a shorter codeword length.
We know that Huffman-codes are optimal with respect to the average codeword length. However, the entropy is approached by increasing the block length. On the other hand, for long blocks of source symbols, Huffman-coding is a rather complex procedure, since it requires the calculation of the probabilities of all sequences of the given block length and the construction of the corresponding complete code.
For compression techniques based on statistical methods often arithmetic coding is preferred. Arithmetic coding is a straightforward extension of the Shannon-Fano-Elias-code. The idea is to represent a probability by an interval. In order to do so, the probabilities have to be calculated very accurately. This process is denoted as modelling of the source. So statistical compression techniques consist of two stages: modelling and coding. As just mentioned, coding is usually done by arithmetic coding. The different algorithms like, for instance, DCM (Discrete Markov Coding) and PPM (Prediction by Partial Matching) vary in the way of modelling the source. We are going to present the context-tree weighting method, a transparent algorithm for the estimation of block probabilities due to Willems, Shtarkov, and Tjalkens, which also allows a straightforward analysis of the efficiency.
The idea behind arithmetic coding is to represent a message  by interval
by interval  , where
, where  is the sum of the probabilities of those sequences which are smaller than
is the sum of the probabilities of those sequences which are smaller than  in lexicographic order.
in lexicographic order.
A codeword  assigned to message
assigned to message  also corresponds to an interval. Namely, we identify codeword
also corresponds to an interval. Namely, we identify codeword  of length
of length  with interval
with interval  , where
, where  is the binary expansion of the nominator in the fraction
is the binary expansion of the nominator in the fraction  . The special choice of codeword
. The special choice of codeword  will be obtained from
will be obtained from  and
and  as follows:
as follows:

So message  is encoded by a codeword
is encoded by a codeword  , whose interval
, whose interval  is inside interval
is inside interval  .
.
Let us illustrate arithmetic coding by the following example of a discrete memoryless source with  and
and  .
.
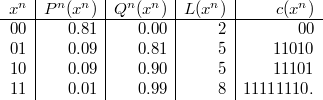
At first glance it may seem that this code is much worse than the Huffman code for the same source with codeword lengths ( ) we found previously. On the other hand, it can be shown that arithmetic coding always achieves an average codeword length
) we found previously. On the other hand, it can be shown that arithmetic coding always achieves an average codeword length  ,
which is only two bits apart from the lower bound in the noiseless
coding theorem. Huffman coding would usually yield an even better code.
However, this “negligible” loss in compression rate is compensated by
several advantages. The codeword is directly computed from the source
sequence, which means that we do not have to store the code as in the
case of Huffman coding. Further, the relevant source models allow to
easily compute
,
which is only two bits apart from the lower bound in the noiseless
coding theorem. Huffman coding would usually yield an even better code.
However, this “negligible” loss in compression rate is compensated by
several advantages. The codeword is directly computed from the source
sequence, which means that we do not have to store the code as in the
case of Huffman coding. Further, the relevant source models allow to
easily compute  and
and  from
from  , usually by multiplication by
, usually by multiplication by  .
This means that the sequence to be encoded can be parsed sequentially
bit by bit, unlike in Huffman coding, where we would have to encode
blockwise.
.
This means that the sequence to be encoded can be parsed sequentially
bit by bit, unlike in Huffman coding, where we would have to encode
blockwise.
The basic algorithm for encoding a sequence  by arithmetic coding works as follows. We assume that
by arithmetic coding works as follows. We assume that  , (in the case
, (in the case  for all
for all  the discrete memoryless source arises, but in the section on modelling more complicated formulae come into play) and hence
the discrete memoryless source arises, but in the section on modelling more complicated formulae come into play) and hence 
Starting with  and
and  the first
the first  letters of the text to be compressed determine the current interval
letters of the text to be compressed determine the current interval  . These current intervals are successively refined via the recursions
. These current intervals are successively refined via the recursions

 is usually denoted as augend. The final interval
is usually denoted as augend. The final interval  will then be encoded by interval
will then be encoded by interval  as described above. So the algorithm looks as follows.
as described above. So the algorithm looks as follows.
Arithmetic-Encoder(
)
12
3
FOR
TO4
DO5
6
7
8
RETURN
We shall illustrate the encoding procedure by the following example from the literature. Let the discrete, memoryless source  be given with ternary alphabet
be given with ternary alphabet  and
and  ,
,  ,
,  . The sequence
. The sequence  has to be encoded. Observe that
has to be encoded. Observe that  and
and  for all
for all  . Further
. Further  ,
,  , and
, and  .
.
The above algorithm yields
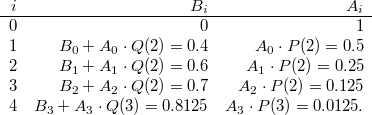
Hence  and
and  . From this can be calculated that
. From this can be calculated that  and finally
and finally  whose binary representation is codeword
whose binary representation is codeword  .
.
Decoding is very similar to encoding. The decoder recursively “undoes” the encoder's recursion. We divide the interval  into subintervals with bounds defined by
into subintervals with bounds defined by  . Then we find the interval in which codeword
. Then we find the interval in which codeword  can be found. This interval determines the next symbol. Then we subtract
can be found. This interval determines the next symbol. Then we subtract  and rescale by multiplication by
and rescale by multiplication by  .
.
Arithmetic-Decoder(
)
1FORTO2
DO3
WHILE4
DO5
6
7
RETURN

Observe that when the decoder only receives codeword  he does not know when the decoding procedure terminates. For instance
he does not know when the decoding procedure terminates. For instance  can be the codeword for
can be the codeword for  ,
,  ,
,  , etc. In the above pseudocode it is implicit that the number
, etc. In the above pseudocode it is implicit that the number  of symbols has also been transmitted to the decoder, in which case it
is clear what the last letter to be encoded was. Another possibility
would be to provide a special end-of-file (EOF)-symbol with a small
probability, which is known to both the encoder and the decoder. When
the decoder sees this symbol, he stops decoding. In this case line 1
would be replaced by
of symbols has also been transmitted to the decoder, in which case it
is clear what the last letter to be encoded was. Another possibility
would be to provide a special end-of-file (EOF)-symbol with a small
probability, which is known to both the encoder and the decoder. When
the decoder sees this symbol, he stops decoding. In this case line 1
would be replaced by
1WHILE(EOF)
(and  would have to be increased). In our above example, the decoder would receive the codeword
would have to be increased). In our above example, the decoder would receive the codeword  , the binary expansion of
, the binary expansion of  up to
up to  bits. This number falls in the interval
bits. This number falls in the interval  which belongs to the letter
which belongs to the letter  , hence the first letter
, hence the first letter  . Then he calculates
. Then he calculates  . Again this number is in the interval
. Again this number is in the interval  and the second letter is
and the second letter is  . In order to determine
. In order to determine  the calculation
the calculation  must be performed. Again
must be performed. Again  such that also
such that also  . Finally
. Finally  . Since
. Since  , the last letter of the sequence must be
, the last letter of the sequence must be  .
.
Recall that message  is encoded by a codeword
is encoded by a codeword  , whose interval
, whose interval  is inside interval
is inside interval  . This follows from
. This follows from  .
.
Obviously a prefix code is obtained, since a codeword can only be a
prefix of another one, if their corresponding intervals overlap – and
the intervals  are obviously disjoint for different
are obviously disjoint for different  -s.
-s.
Further, we mentioned already that arithmetic coding compresses down
to the entropy up to two bits. This is because for every sequence  it is
it is  . It can also be shown that the additional transmission of block length
. It can also be shown that the additional transmission of block length  or the introduction of the EOF symbol only results in a negligible loss of compression.
or the introduction of the EOF symbol only results in a negligible loss of compression.
However, the basic algorithms we presented are not useful in order
to compress longer files, since with increasing block length  the intervals are getting smaller and smaller, such that rounding
errors will be unavoidable. We shall present a technique to overcome
this problem in the following.
the intervals are getting smaller and smaller, such that rounding
errors will be unavoidable. We shall present a technique to overcome
this problem in the following.
The basic algorithm for arithmetic coding is linear in the length  of the sequence to be encoded. Usually, arithmetic coding is compared
to Huffman coding. In contrast to Huffman coding, we do not have to
store the whole code, but can obtain the codeword directly from the
corresponding interval. However, for a discrete memoryless source,
where the probability distribution
of the sequence to be encoded. Usually, arithmetic coding is compared
to Huffman coding. In contrast to Huffman coding, we do not have to
store the whole code, but can obtain the codeword directly from the
corresponding interval. However, for a discrete memoryless source,
where the probability distribution  is the same for all letters, this is not such a big advantage, since
the Huffman code will be the same for all letters (or blocks of
is the same for all letters, this is not such a big advantage, since
the Huffman code will be the same for all letters (or blocks of  letters) and hence has to be computed only once. Huffman coding, on the
other hand, does not use any multiplications which slow down arithmetic
coding.
letters) and hence has to be computed only once. Huffman coding, on the
other hand, does not use any multiplications which slow down arithmetic
coding.
For the adaptive case, in which the  's may change for different letters
's may change for different letters  to be encoded, a new Huffman code would have to be calculated for each
new letter. In this case, usually arithmetic coding is preferred. We
shall investigate such situations in the section on modelling. For
implementations in practice floating point arithmetic is avoided.
Instead, the subdivision of the interval
to be encoded, a new Huffman code would have to be calculated for each
new letter. In this case, usually arithmetic coding is preferred. We
shall investigate such situations in the section on modelling. For
implementations in practice floating point arithmetic is avoided.
Instead, the subdivision of the interval  is represented by a subdivision of the integer range
is represented by a subdivision of the integer range  ,
say, with proportions according to the source probabilities. Now
integer arithmetic can be applied, which is faster and more precise.
,
say, with proportions according to the source probabilities. Now
integer arithmetic can be applied, which is faster and more precise.
In the basic algorithms for arithmetic encoding and decoding the
shrinking of the current interval would require the use of high
precision arithmetic for longer sequences. Further, no bit of the
codeword is produced until the complete sequence  has been read in. This can be overcome by coding each bit as soon as it
is known and then double the length of the current interval
has been read in. This can be overcome by coding each bit as soon as it
is known and then double the length of the current interval  ,
say, so that this expansion represents only the unknown part of the
interval. This is the case when the leading bits of the lower and upper
bound are the same, i. e. the interval is completely contained either
in
,
say, so that this expansion represents only the unknown part of the
interval. This is the case when the leading bits of the lower and upper
bound are the same, i. e. the interval is completely contained either
in  or in
or in  . The following expansion rules guarantee that the current interval does not become too small.
. The following expansion rules guarantee that the current interval does not become too small.
Case 1 ( ):
):  ,
,  .
.
Case 2 ( ):
):  ,
,  .
.
Case 3 ( ):
):  ,
,  .
.
The last case called underflow (or follow) prevents the interval from shrinking too much when the bounds are close to  . Observe that if the current interval is contained in
. Observe that if the current interval is contained in  with
with 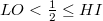 ,
we do not know the next output bit, but we do know that whatever it is,
the following bit will have the opposite value. However, in contrast to
the other cases we cannot continue encoding here, but have to wait
(remain in the underflow state and adjust a counter
,
we do not know the next output bit, but we do know that whatever it is,
the following bit will have the opposite value. However, in contrast to
the other cases we cannot continue encoding here, but have to wait
(remain in the underflow state and adjust a counter  to the number of subsequent underflows, i. e.
to the number of subsequent underflows, i. e.  ) until the current interval falls into either
) until the current interval falls into either  or
or  . In this case we encode the leading bit of this interval –
. In this case we encode the leading bit of this interval –  for
for  and
and  for
for  – followed by
– followed by  many inverse bits and then set
many inverse bits and then set  . The procedure stops, when all letters are read in and the current interval does not allow any further expansion.
. The procedure stops, when all letters are read in and the current interval does not allow any further expansion.
Arithmetic-Precision-Encoder(
)
12
3
4
5
FOR
TO6
DO7
8
9
WHILEAND NOT (
AND
) 10
DOIF11
THENmany
s 12
13
14
15
ELSEIF16
THEN,
many 0s 17
18
19
20
ELSE IFAND
21
THEN22
23
24
IF25
THEN,
many 1s) 26
RETURN
We shall illustrate the encoding algorithm in Figure3.6 by our example – the encoding of the message  with alphabet
with alphabet  and probability distribution
and probability distribution  .
An underflow occurs in the sixth row: we keep track of the underflow
state and later encode the inverse of the next bit, here this inverse
bit is the
.
An underflow occurs in the sixth row: we keep track of the underflow
state and later encode the inverse of the next bit, here this inverse
bit is the  in the ninth row. The encoded string is
in the ninth row. The encoded string is  .
.
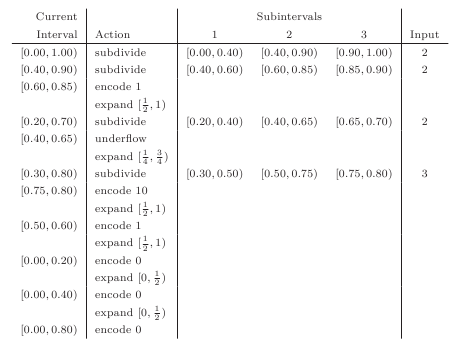
Precision-decoding involves the consideration of a third variable besides the interval bounds LO and HI.
In this section we shall only consider binary sequences  to be compressed by an arithmetic coder. Further, we shortly write
to be compressed by an arithmetic coder. Further, we shortly write  instead of
instead of  in order to allow further subscripts and superscripts for the description of the special situation.
in order to allow further subscripts and superscripts for the description of the special situation.  will denote estimated probabilities,
will denote estimated probabilities,  weighted probabilities, and
weighted probabilities, and  probabilities assigned to a special context
probabilities assigned to a special context  .
.
The application of arithmetic coding is quite appropriate if the probability distribution of the source is such that  can easily be calculated from
can easily be calculated from  . Obviously this is the case, when the source is discrete and memoryless, since then
. Obviously this is the case, when the source is discrete and memoryless, since then  .
.
Even when the underlying parameter  of a binary, discrete memoryless source is not known, there is an
efficient way due to Krichevsky and Trofimov to estimate the
probabilities via
of a binary, discrete memoryless source is not known, there is an
efficient way due to Krichevsky and Trofimov to estimate the
probabilities via

where  and
and  denote the number of
denote the number of  s and
s and  s, respectively, in the sequence
s, respectively, in the sequence  . So given the sequence
. So given the sequence  with
with  many
many  s and
s and  many
many  s, the probability that the next letter
s, the probability that the next letter  will be a
will be a  is estimated as
is estimated as  . The estimated block probability of a sequence containing
. The estimated block probability of a sequence containing  zeros and
zeros and  ones then is
ones then is

with initial values  and
and  as in Figure 3.7, where the values of the Krichevsky-Trofimov–estimator
as in Figure 3.7, where the values of the Krichevsky-Trofimov–estimator  for small
for small  are listed.
are listed.
Note that the summand  in the nominator guarantees that the probability for the next letter to be a
in the nominator guarantees that the probability for the next letter to be a  is positive even when the symbol
is positive even when the symbol  did not occur in the sequence so far. In order to avoid infinite
codeword length, this phenomenon has to be carefully taken into account
when estimating the probability of the next letter in all approaches to
estimate the parameters, when arithmetic coding is applied.
did not occur in the sequence so far. In order to avoid infinite
codeword length, this phenomenon has to be carefully taken into account
when estimating the probability of the next letter in all approaches to
estimate the parameters, when arithmetic coding is applied.
In most situations the source is not memoryless, i. e., the
dependencies between the letters have to be considered. A suitable way
to represent such dependencies is the use of a suffix tree, which we
denote as context tree. The context of symbol  is suffix
is suffix  preceding
preceding  . To each context (or leaf in the suffix tree)
. To each context (or leaf in the suffix tree)  there corresponds a parameter
there corresponds a parameter  , which is the probability of the occurrence of a 1 when the last sequence of past source symbols is equal to context
, which is the probability of the occurrence of a 1 when the last sequence of past source symbols is equal to context  (and hence
(and hence  is the probability for a
is the probability for a  in this case). We are distinguishing here between the model (the suffix tree) and the parameters (
in this case). We are distinguishing here between the model (the suffix tree) and the parameters ( ).
).
Example 3.1 Let  and
and  ,
,  , and
, and  . The corresponding suffix tree jointly with the parsing process for a special sequence can be seen in Figure 3.8.
. The corresponding suffix tree jointly with the parsing process for a special sequence can be seen in Figure 3.8.
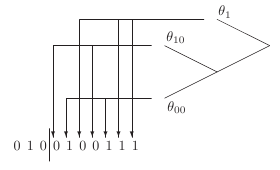
The actual probability of the sequence '  ' given the past '
' given the past '  ' is
' is  , since the first letter
, since the first letter  is preceded by suffix
is preceded by suffix  , the second letter
, the second letter  is preceded by suffix
is preceded by suffix  , etc.
, etc.
Suppose the model  is known, but not the parameters
is known, but not the parameters  .
The problem now is to find a good coding distribution for this case.
The tree structure allows to easily determine which context precedes a
particular symbol. All symbols having the same context (or suffix)
.
The problem now is to find a good coding distribution for this case.
The tree structure allows to easily determine which context precedes a
particular symbol. All symbols having the same context (or suffix)  form a memoryless source subsequence whose probability is determined by the unknown parameter
form a memoryless source subsequence whose probability is determined by the unknown parameter  . In our example these subsequences are '
. In our example these subsequences are '  ' for
' for  , '
, '  ' for
' for  and '
and '  ' for
' for  . One uses the Krichevsky-Trofimov-estimator for this case. To each node
. One uses the Krichevsky-Trofimov-estimator for this case. To each node  in the suffix tree, we count the numbers
in the suffix tree, we count the numbers  of zeros and
of zeros and  of ones preceded by suffix
of ones preceded by suffix  . For the children
. For the children  and
and  of parent node
of parent node  obviously
obviously  and
and  must be satisfied.
must be satisfied.
In our example  for the root
for the root  ,
,  and
and  ,
,  . Further
. Further  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , and
, and  . These last numbers are not relevant for our special source
. These last numbers are not relevant for our special source  but will be important later on, when the source model or the corresponding suffix tree, respectively, is not known in advance.
but will be important later on, when the source model or the corresponding suffix tree, respectively, is not known in advance.
Example 3.2 Let  as in the previous example. Encoding a subsequence is done by successively updating the corresponding counters for
as in the previous example. Encoding a subsequence is done by successively updating the corresponding counters for  and
and  . For example, when we encode the sequence '
. For example, when we encode the sequence '  ' given the past '
' given the past '  ' using the above suffix tree and Krichevsky-Trofimov-estimator we obtain
' using the above suffix tree and Krichevsky-Trofimov-estimator we obtain

where  ,
,  and
and  are the probabilities of the subsequences '
are the probabilities of the subsequences '  ', '
', '  ' and '
' and '  ' in the context of the leaves. These subsequences are assumed to be memoryless.
' in the context of the leaves. These subsequences are assumed to be memoryless.
Suppose we have a good coding distribution  for source 1 and another one,
for source 1 and another one,  , for source 2. We are looking for a good coding distribution for both sources. One possibility is to compute
, for source 2. We are looking for a good coding distribution for both sources. One possibility is to compute  and
and  and then 1 bit is needed to identify the best model which then will be
used to compress the sequence. This method is called selecting. Another
possibility is to employ the weighted distribution, which is
and then 1 bit is needed to identify the best model which then will be
used to compress the sequence. This method is called selecting. Another
possibility is to employ the weighted distribution, which is

We shall present now the context-tree weighting algorithm. Under the assumption that a context tree is a full tree of depth  , only
, only  and
and  , i. e. the number of zeros and ones in the subsequence of bits preceded by context
, i. e. the number of zeros and ones in the subsequence of bits preceded by context  , are stored in each node
, are stored in each node  of the context tree.
of the context tree.
Further, to each node  is assigned a weighted probability
is assigned a weighted probability  which is recursively defined as
which is recursively defined as

where  describes the length of the (binary) string
describes the length of the (binary) string  and
and  is the estimated probability using the Krichevsky-Trofimov-estimator.
is the estimated probability using the Krichevsky-Trofimov-estimator.
Example 3.3 After encoding the sequence '  ' given the past '
' given the past '  ' we obtain the context tree of depth 3 in Figure 3.9. The weighted probability
' we obtain the context tree of depth 3 in Figure 3.9. The weighted probability  of the root node
of the root node  finally yields the coding probability corresponding to the parsed sequence.
finally yields the coding probability corresponding to the parsed sequence.
Figure 3.9. Weighted context tree for source sequence ' ' with past . The pair denotes zeros and ones preceded by the corresponding context . For the contexts it is .
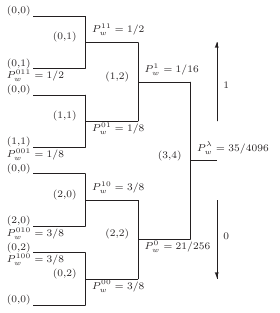
Recall that for the application in arithmetic coding it is important that probabilities  and
and  can be efficiently calculated from
can be efficiently calculated from  . This is possible with the context-tree weighting method, since the weighted probabilities
. This is possible with the context-tree weighting method, since the weighted probabilities  only have to be updated, when
only have to be updated, when  is changing. This just occurs for the contexts along the path from the
root to the leaf in the context tree preceding the new symbol
is changing. This just occurs for the contexts along the path from the
root to the leaf in the context tree preceding the new symbol  —namely the
—namely the  contexts
contexts  for
for  and the root
and the root  . Along this path,
. Along this path,  has to be performed, when
has to be performed, when  , and
, and  has to be performed, when
has to be performed, when  , and the corresponding probabilities
, and the corresponding probabilities  and
and  have to be updated.
have to be updated.
This suggests the following algorithm for updating the context tree  when reading the next letter
when reading the next letter  . Recall that to each node of the tree we store the parameters
. Recall that to each node of the tree we store the parameters  ,
,  and
and  . These parameters have to be updated in order to obtain
. These parameters have to be updated in order to obtain  . We assume the convention that the ordered pair
. We assume the convention that the ordered pair  denotes the root
denotes the root  .
.
Update-Context-Tree(
)
12
IF3
THEN4
5
ELSE6
7
FOR
TO8
DO9
IF10
THEN11
12
ELSE13
14
15
RETURN
The probability  assigned to the root in the context tree will be used for the
successive subdivisions in arithmetic coding. Initially, before reading
assigned to the root in the context tree will be used for the
successive subdivisions in arithmetic coding. Initially, before reading
 , the parameters in the context tree are
, the parameters in the context tree are  ,
,  , and
, and  for all contexts
for all contexts  in the tree. In our example the updates given the past
in the tree. In our example the updates given the past  would yield the successive probabilities
would yield the successive probabilities  :
:  for
for  ,
,  for
for  ,
,  for
for  ,
,  for
for  ,
,  for
for  ,
,  for
for  ,
,  for
for  , and finally
, and finally  for
for  .
.
Recall that the quality of a code concerning its compression
capability is measured with respect to the average codeword length. The
average codeword length of the best code comes as close as possible to
the entropy of the source. The difference between the average codeword
length and the entropy is denoted as the redundancy  of code
of code  , hence
, hence

which obviously is the weighted (by  ) sum of the individual redundancies
) sum of the individual redundancies
The individual redundancy  of sequences
of sequences  given the (known) source
given the (known) source  for all
for all  for
for  ,
,  is bounded by
is bounded by

The individual redundancy  of sequences
of sequences  using the context–tree weighting algorithm (and hence a complete tree of all possible contexts as model
using the context–tree weighting algorithm (and hence a complete tree of all possible contexts as model  ) is bounded by
) is bounded by

Comparing these two formulae, we see that the difference of the individual redundancies is  bits. This can be considered as the cost of not knowing the model, i.e.
the model redundancy. So, the redundancy splits into the parameter
redundancy, i. e. the cost of not knowing the parameter, and the model
redundancy. It can be shown that the expected redundancy behaviour of
the context-tree weighting method achieves the asymptotic lower bound
due to Rissanen who could demonstrate that about
bits. This can be considered as the cost of not knowing the model, i.e.
the model redundancy. So, the redundancy splits into the parameter
redundancy, i. e. the cost of not knowing the parameter, and the model
redundancy. It can be shown that the expected redundancy behaviour of
the context-tree weighting method achieves the asymptotic lower bound
due to Rissanen who could demonstrate that about  bits per parameter is the minimum possible expected redundancy for
bits per parameter is the minimum possible expected redundancy for  .
.
The computational complexity is proportional to the number of nodes that are visited when updating the tree, which is about  . Therefore, the number of operations necessary for processing
. Therefore, the number of operations necessary for processing  symbols is linear in
symbols is linear in  . However, these operations are mainly multiplications with factors requiring high precision.
. However, these operations are mainly multiplications with factors requiring high precision.
As for most modelling algorithms, the backlog of implementations in
practice is the huge amount of memory. A complete tree of depth  has to be stored and updated. Only with increasing
has to be stored and updated. Only with increasing  the estimations of the probabilities are becoming more accurate and
hence the average codeword length of an arithmetic code based on these
estimations would become shorter. The size of the memory, however,
depends exponentially on the depth of the tree.
the estimations of the probabilities are becoming more accurate and
hence the average codeword length of an arithmetic code based on these
estimations would become shorter. The size of the memory, however,
depends exponentially on the depth of the tree.
We presented the context--tree weighting method only for binary
sequences. Note that in this case the cumulative probability of a
binary sequence  can be calculated as
can be calculated as

For compression of sources with larger alphabets, for instance ASCII-files, we refer to the literature.
Exercises
3.2-1 Compute the arithmetic codes for the sources  ,
,  with
with  and
and  and compare these codes with the corresponding Huffman-codes derived previously.
and compare these codes with the corresponding Huffman-codes derived previously.
3.2-2 For the codes derived in the previous exercise compute the individual redundancies of each codeword and the redundancies of the codes.
3.2-3 Compute the estimated probabilities  for the sequence
for the sequence  and all its subsequences using the Krichevsky-Trofimov-estimator.
and all its subsequences using the Krichevsky-Trofimov-estimator.
3.2-4 Compute all parameters  and the estimated probability
and the estimated probability  for the sequence
for the sequence  given the past
given the past  , when the context tree
, when the context tree  is known. What will be the codeword of an arithmetic code in this case?
is known. What will be the codeword of an arithmetic code in this case?
3.2-5 Compute all parameters  and the estimated probability
and the estimated probability  for the sequence
for the sequence  given the past
given the past  , when the context tree is not known, using the context-tree weighting algorithm.
, when the context tree is not known, using the context-tree weighting algorithm.
3.2-6 Based on the computations from the previous exercise, update the estimated probability for the sequence  given the past
given the past  .
.
Show that for the cumulative probability of a binary sequence  it is
it is

In 1976–1978 Jacob Ziv and Abraham Lempel introduced two universal coding algorithms, which in contrast to statistical coding techniques, considered so far, do not make explicit use of the underlying probability distribution. The basic idea here is to replace a previously seen string with a pointer into a history buffer (LZ77) or with the index of a dictionary (LZ78). LZ algorithms are widely used—”zip” and its variations use the LZ77 algorithm. So, in contrast to the presentation by several authors, Ziv-Lempel-coding is not a single algorithm. Originally, Lempel and Ziv introduced a method to measure the complexity of a string—like in Kolmogorov complexity. This led to two different algorithms, LZ77 and LZ78. Many modifications and variations have been developed since. However, we shall present the original algorithms and refer to the literature for further information.
The idea of LZ77 is to pass a sliding window
over the text to be compressed. One looks for the longest substring in
this window representing the next letters of the text. The window
consists of two parts: a history window of length  , say, in which the last
, say, in which the last  bits of the text considered so far are stored, and a lookahead window of length
bits of the text considered so far are stored, and a lookahead window of length  containing the next
containing the next  bits of the text. In the simplest case
bits of the text. In the simplest case  and
and  are fixed. Usually,
are fixed. Usually,  is much bigger than
is much bigger than  . Then one encodes the triple (offset, length, letter). Here the offset
is the number of letters one has to go back in the text to find the
matching substring, the length is just the length of this matching
substring, and the letter to be stored is the letter following the
matching substring. Let us illustrate this procedure with an example.
Assume the text to be compressed is
. Then one encodes the triple (offset, length, letter). Here the offset
is the number of letters one has to go back in the text to find the
matching substring, the length is just the length of this matching
substring, and the letter to be stored is the letter following the
matching substring. Let us illustrate this procedure with an example.
Assume the text to be compressed is  , the window is of size 15 with
, the window is of size 15 with  letters history and
letters history and  letters lookahead buffer. Assume, the sliding window now arrived at
letters lookahead buffer. Assume, the sliding window now arrived at

i. e., the history window contains the 10 letters  and the lookahead window contains the five letters
and the lookahead window contains the five letters  . The longest substring matching the first letters of the lookahead window is
. The longest substring matching the first letters of the lookahead window is  of length
of length  , which is found nine letters back from the right end of the history window. So we encode
, which is found nine letters back from the right end of the history window. So we encode  , since
, since  is the next letter (the string
is the next letter (the string  is also found five letters back, in the original LZ77 algorithm one
would select the largest offset). The window then is moved
is also found five letters back, in the original LZ77 algorithm one
would select the largest offset). The window then is moved  letters forward
letters forward

The next codeword is  , since the longest matching substring is
, since the longest matching substring is  of length
of length  found
found  letters backwards and
letters backwards and  is the letter following this substring in the lookahead window. We proceed with
is the letter following this substring in the lookahead window. We proceed with

and encode  . Further
. Further

Here we encode  . Observe that the match can extend into the lookahead window.
. Observe that the match can extend into the lookahead window.
There are many subtleties to be taken into account. If a symbol did not appear yet in the text, offset and length are set to  .
If there are two matching strings of the same length, one has to choose
between the first and the second offset. Both variations have
advantages. Initially one might start with an empty history window and
the first letters of the text to be compressed in the lookahead window
- there are also further variations.
.
If there are two matching strings of the same length, one has to choose
between the first and the second offset. Both variations have
advantages. Initially one might start with an empty history window and
the first letters of the text to be compressed in the lookahead window
- there are also further variations.
A common modification of the original scheme is to output only the pair (offset, length) and not the following letter of the text. Using this coding procedure one has to take into consideration the case in which the next letter does not occur in the history window. In this case, usually the letter itself is stored, such that the decoder has to distinguish between pairs of numbers and single letters. Further variations do not necessarily encode the longest matching substring.
LZ78 does not use a sliding window but a dictionary which is
represented here as a table with an index and an entry. LZ78 parses the
text to be compressed into a collection of strings, where each string
is the longest matching string  seen so far plus the symbol
seen so far plus the symbol  following
following  in the text to be compressed. The new string
in the text to be compressed. The new string  is added into the dictionary. The new entry is coded as
is added into the dictionary. The new entry is coded as  , where
, where  is the index of the existing table entry
is the index of the existing table entry  and
and  is the appended symbol.
is the appended symbol.
As an example, consider the string “  ”. It is divided by LZ78 into strings as shown below. String
”. It is divided by LZ78 into strings as shown below. String  is here the empty string.
is here the empty string.

Since we are not using a sliding window, there is no limit for how far back strings can reach. However, in practice the dictionary cannot continue to grow infinitely. There are several ways to manage this problem. For instance, after having reached the maximum number of entries in the dictionary, no further entries can be added to the table and coding becomes static. Another variation would be to replace older entries. The decoder knows how many bits must be reserved for the index of the string in the dictionary, and hence decompression is straightforward.
Ziv-Lempel coding asymptotically achieves the best possible
compression rate which again is the entropy rate of the source. The
source model, however, is much more general than the discrete
memoryless source. The stochastic process generating the next letter,
is assumed to be stationary (the probability of a sequence does not
depend on the instant of time, i. e.  for all
for all  and all sequences
and all sequences  ). For stationary processes the limit
). For stationary processes the limit  exists and is defined to be the entropy rate.
exists and is defined to be the entropy rate.
If  denotes the number of strings in the parsing process of LZ78 for a text
generated by a stationary source, then the number of bits required to
encode all these strings is
denotes the number of strings in the parsing process of LZ78 for a text
generated by a stationary source, then the number of bits required to
encode all these strings is  . It can be shown that
. It can be shown that  converges to the entropy rate of the source. However, this would require that all strings can be stored in the dictionary.
converges to the entropy rate of the source. However, this would require that all strings can be stored in the dictionary.
If we fix the size of the sliding window or the dictionary, the running time of encoding a sequence of  letters will be linear in
letters will be linear in  .
However, as usually in data compression, there is a tradeoff between
compression rate and speed. A better compression is only possible with
larger memory. Increasing the size of the dictionary or the window
will, however, result in a slower performance, since the most time
consuming task is the search for the matching substring or the position
in the dictionary.
.
However, as usually in data compression, there is a tradeoff between
compression rate and speed. A better compression is only possible with
larger memory. Increasing the size of the dictionary or the window
will, however, result in a slower performance, since the most time
consuming task is the search for the matching substring or the position
in the dictionary.
Decoding in both LZ77 and LZ78 is straightforward. Observe that with LZ77 decoding is usually much faster than encoding, since the decoder already obtains the information at which position in the history he can read out the next letters of the text to be recovered, whereas the encoder has to find the longest matching substring in the history window. So algorithms based on LZ77 are useful for files which are compressed once and decompressed more frequently.
Further, the encoded text is not necessarily shorter than the original text. Especially in the beginning of the encoding the coded version may expand a lot. This expansion has to be taken into consideration.
For implementation it is not optimal to represent the text as an array. A suitable data structure will be a circular queue for the lookahead window and a binary search tree for the history window in LZ77, while for LZ78 a dictionary tree should be used.
Exercises
3.3-1 Apply the algorithms LZ77 and LZ78 to the string “abracadabra”.
3.3-2 Which type of files will be well compressed with LZ77 and LZ78, respectively? For which type of files are LZ77 and LZ78 not so advantageous?
3.3-3 Discuss the advantages of encoding the first or the last offset, when several matching substrings are found in LZ77.
The Burrows-Wheeler-transform will best be demonstrated by an example. Assume that our original text is  “WHEELER”. This text will be mapped to a second text
“WHEELER”. This text will be mapped to a second text  and an index
and an index  according to the following rules.
according to the following rules.
1) We form a matrix  consisting of all cyclic shifts of the original text
consisting of all cyclic shifts of the original text  . In our example
. In our example
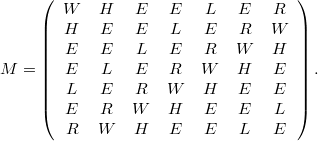
2) From  we obtain a new matrix
we obtain a new matrix  by simply ordering the rows in
by simply ordering the rows in  lexicographically. Here this yields the matrix
lexicographically. Here this yields the matrix
3) The transformed string  then is just the last column of the matrix
then is just the last column of the matrix  and the index
and the index  is the number of the row of
is the number of the row of  , in which the original text is contained. In our example
, in which the original text is contained. In our example  “HELWEER” and
“HELWEER” and  – we start counting the the rows with row no.
– we start counting the the rows with row no.  .
.
This gives rise to the following pseudocode. We write here  instead of
instead of  and
and  instead of
instead of  , since the purpose of the vector notation is only to distinguish the vectors from the letters in the text.
, since the purpose of the vector notation is only to distinguish the vectors from the letters in the text.
BWT-Encoder(
)
1FOR
TO2
DO3
FOR
TO4
DOFOR
TO5
DO6
FOR
TO7
DOrowof
row
of
in lexicographic order 8
FOR
TO9
DO10
11
WHILE(rowof
row
of
) 12
DO13
14
RETURNand

It can be shown that this transformation is invertible, i. e., it is possible to reconstruct the original text  from its transform
from its transform  and the index
and the index  .
This is because these two parameters just yield enough information to
find out the underlying permutation of the letters. Let us illustrate
this reconstruction using the above example again. From the transformed
string
.
This is because these two parameters just yield enough information to
find out the underlying permutation of the letters. Let us illustrate
this reconstruction using the above example again. From the transformed
string  we obtain a second string
we obtain a second string  by simply ordering the letters in
by simply ordering the letters in  in ascending order. Actually,
in ascending order. Actually,  is the first column of the matrix
is the first column of the matrix  above. So, in our example
above. So, in our example


Now obviously the first letter  of our original text
of our original text  is the letter in position
is the letter in position  of the sorted string
of the sorted string  , so here
, so here  . Then we look at the position of the letter just considered in the string
. Then we look at the position of the letter just considered in the string  – here there is only one W, which is letter no. 3 in
– here there is only one W, which is letter no. 3 in  . This position gives us the location of the next letter of the original text, namely
. This position gives us the location of the next letter of the original text, namely  .
.  is found in position no. 0 in
is found in position no. 0 in  , hence
, hence  . Now there are three E–s in the string
. Now there are three E–s in the string  and we take the first one not used so far, here the one in position no. 1, and hence
and we take the first one not used so far, here the one in position no. 1, and hence  . We iterate this procedure and find
. We iterate this procedure and find  ,
,  ,
,  .
.
This suggests the following pseudocode.
BWT-Decoder(
)
1sort
2
3
FOR
TO4
DO5
WHILE(OR
is a component of
) 6
DO7
8
9
RETURN
This algorithm implies a more formal description. Since the decoder only knows  , he has to sort this string to find out
, he has to sort this string to find out  . To each letter
. To each letter  from the transformed string
from the transformed string  record the position
record the position  in
in  from which it was jumped to by the process described above. So the vector
from which it was jumped to by the process described above. So the vector  in our pseudocode yields a permutation
in our pseudocode yields a permutation  such that for each
such that for each  row
row  it is
it is  in matrix
in matrix  . In our example
. In our example  . This permutation can be used to reconstruct the original text
. This permutation can be used to reconstruct the original text  of length
of length  via
via  , where
, where  and
and  for
for  .
.
Observe that so far the original data have only been transformed and are not compressed, since string  has exactly the same length as the original string
has exactly the same length as the original string  .
So what is the advantage of the Burrows-Wheeler transformation? The
idea is that the transformed string can be much more efficiently
encoded than the original string. The dependencies among the letters
have the effect that in the transformed string
.
So what is the advantage of the Burrows-Wheeler transformation? The
idea is that the transformed string can be much more efficiently
encoded than the original string. The dependencies among the letters
have the effect that in the transformed string  there appear long blocks consisting of the same letter.
there appear long blocks consisting of the same letter.
In order to exploit such frequent blocks of the same letter, Burrows and Wheeler suggested the following move-to-front-code, which we shall illustrate again with our example above.
We write down a list containing the letters used in our text in alphabetic order indexed by their position in this list.
Then we parse through the transformed string  letter by letter, note the index of the next letter and move this
letter to the front of the list. So in the first step we note 1—the
index of the H, move H to the front and obtain the list
letter by letter, note the index of the next letter and move this
letter to the front of the list. So in the first step we note 1—the
index of the H, move H to the front and obtain the list
Then we note 1 and move E to the front,
note 2 and move L to the front,
note 4 and move W to the front,
note 2 and move E to the front,
note 0 and leave E at the front,
note 4 and move R to the front,
So we obtain the sequence  as our move-to-front-code. The pseudocode may look as follows, where
as our move-to-front-code. The pseudocode may look as follows, where  is a list of the letters occuring in the string
is a list of the letters occuring in the string  .
.
Move-To-Front(
)
1list of
letters occuring in
ordered alphabetically 2
FOR
TO3
DO4
WHILE() 5
6
7
FOR
TO8
DO9
RETURN
The move-to-front-code  will finally be compressed, for instance by Huffman-coding.
will finally be compressed, for instance by Huffman-coding.
Correctness.
The compression is due to the move-to-front-code obtained from the transformed string  . It can easily be seen that this move-to-front coding procedure is invertible, so one can recover the string
. It can easily be seen that this move-to-front coding procedure is invertible, so one can recover the string  from the code obtained as above.
from the code obtained as above.
Now it can be observed that in the move-to-front-code small numbers
occur more frequently. Unfortunately, this will become obvious only
with much longer texts than in our example—in long strings it was
observed that even about 70 per cent of the numbers are  .
This irregularity in distribution can be exploited by compressing the
sequence obtained after move-to-front-coding, for instance by
Huffman-codes or run-length codes.
.
This irregularity in distribution can be exploited by compressing the
sequence obtained after move-to-front-coding, for instance by
Huffman-codes or run-length codes.
The algorithm performed very well in practice regarding the compression rate as well as the speed. The asymptotic optimality of compression has been proven for a wide class of sources.
Analysis.
The most complex part of the Burrows-Wheeler transform is the sorting of the block yielding the transformed string  .
Due to fast sorting procedures, especially suited for the type of data
to be compressed, compression algorithms based on the Burrows-Wheeler
transform are usually very fast. On the other hand, compression is done
blockwise. The text to be compressed has to be divided into blocks of
appropriate size such that the matrices
.
Due to fast sorting procedures, especially suited for the type of data
to be compressed, compression algorithms based on the Burrows-Wheeler
transform are usually very fast. On the other hand, compression is done
blockwise. The text to be compressed has to be divided into blocks of
appropriate size such that the matrices  and
and  still fit into the memory. So the decoder has to wait until the whole
next block is transmitted and cannot work sequentially bit by bit as in
arithmetic coding or Ziv-Lempel coding.
still fit into the memory. So the decoder has to wait until the whole
next block is transmitted and cannot work sequentially bit by bit as in
arithmetic coding or Ziv-Lempel coding.
Exercises
3.4-1 Apply the Burrows-Wheeler-transform and the move-to-front code to the text “abracadabra”.
3.4-2 Verify that the transformed string  and the index
and the index  of the position in the sorted text
of the position in the sorted text  (containing the first letter of the original text to be compressed)
indeed yield enough information to reconstruct the original text.
(containing the first letter of the original text to be compressed)
indeed yield enough information to reconstruct the original text.
3.4-3 Show how in our example the decoder would obtain the string  ”HELWEER” from the move-to-front code
”HELWEER” from the move-to-front code  and the letters E, H, L, W, R occuring in the text. Describe the general procedure for decoding move-to-front codes.
and the letters E, H, L, W, R occuring in the text. Describe the general procedure for decoding move-to-front codes.
3.4-4 We followed here the encoding procedure presented by Burrows and Wheeler. Can the encoder obtain the transformed string  even without constructing the two matrices
even without constructing the two matrices  and
and  ?
?
The idea of image compression algorithms is similar to the one behind the Burrows-Wheeler-transform. The text to be compressed is transformed to a format which is suitable for application of the techniques presented in the previous sections, such as Huffman coding or arithmetic coding. There are several procedures based on the type of image (for instance, black/white, greyscale or colour image) or compression (lossless or lossy). We shall present the basic steps—representation of data, discrete cosine transform, quantisation, coding—of lossy image compression procedures like the standard JPEG.
A greyscale image is represented as a two-dimensional array  , where each entry
, where each entry  represents the intensity (or brightness) at position
represents the intensity (or brightness) at position  of the image. Each
of the image. Each  is either a signed or an unsigned
is either a signed or an unsigned  -bit integers, i. e.,
-bit integers, i. e.,  or
or  .
.
A position in a colour image is usually represented by three greyscale values  ,
,  , and
, and  per position corresponding to the intensity of the primary colours red, green and blue.
per position corresponding to the intensity of the primary colours red, green and blue.
In order to compress the image, the three arrays (or channels)  ,
,  ,
,  are first converted to the luminance/chrominance space by the
are first converted to the luminance/chrominance space by the  -transform (performed entry–wise)
-transform (performed entry–wise)

 is the luminance or intensity channel, where the coefficients weighting
the colours have been found empirically and represent the best possible
approximation of the intensity as perceived by the human eye. The
chrominance channels
is the luminance or intensity channel, where the coefficients weighting
the colours have been found empirically and represent the best possible
approximation of the intensity as perceived by the human eye. The
chrominance channels  and
and  contain the colour information on red and blue as the differences from
contain the colour information on red and blue as the differences from  . The information on green is obtained as big part in the luminance
. The information on green is obtained as big part in the luminance  .
.
A first compression for colour images commonly is already obtained after application of the  -transform by removing irrelevant information.
Since the human eye is less sensitive to rapid colour changes than to
changes in intensity, the resolution of the two chrominance channels
-transform by removing irrelevant information.
Since the human eye is less sensitive to rapid colour changes than to
changes in intensity, the resolution of the two chrominance channels  and
and  is reduced by a factor of
is reduced by a factor of  in both vertical and horizontal direction, which results after sub-sampling in arrays of
in both vertical and horizontal direction, which results after sub-sampling in arrays of  of the original size.
of the original size.
The arrays then are subdivided into  blocks, on which successively the actual (lossy) data compression procedure is applied.
blocks, on which successively the actual (lossy) data compression procedure is applied.
Let us consider the following example based on a real image, on
which the steps of compression will be illustrated. Assume that the  block of
block of  -bit unsigned integers below is obtained as a part of an image.
-bit unsigned integers below is obtained as a part of an image.
Each  block
block  , say, is transformed into a new block
, say, is transformed into a new block  . There are several possible transforms, usually the discrete cosine transform is applied, which here obeys the formula
. There are several possible transforms, usually the discrete cosine transform is applied, which here obeys the formula

The cosine transform is applied after shifting the unsigned integers to signed integers by subtraction of  .
.
DCT(
)
1FOR
TO7 2DOFOR
TO7 3DODCT - coefficient of matrix
4
RETURN
The coefficients need not be calculated according to the formula above. They can also be obtained via a related Fourier transform (see Exercises) such that a Fast Fourier Transform may be applied. JPEG also supports wavelet transforms, which may replace the discrete cosine transform here.
The discrete cosine transform can be inverted via

where  and
and  are normalisation constants.
are normalisation constants.
In our example, the transformed block  is
is
where the entries are rounded.
The discrete cosine transform is closely related to the discrete Fourier transform and similarly maps signals to frequencies. Removing higher frequencies results in a less sharp image, an effect that is tolerated, such that higher frequencies are stored with less accuracy.
Of special importance is the entry  , which can be interpreted as a measure for the intensity of the whole block.
, which can be interpreted as a measure for the intensity of the whole block.
The discrete cosine transform maps integers to real numbers, which
in each case have to be rounded to be representable. Of course, this
rounding already results in a loss of information. However, the
transformed block  will now be much easier to manipulate. A quantisation takes place, which maps the entries of
will now be much easier to manipulate. A quantisation takes place, which maps the entries of  to integers by division by the corresponding entry in a luminance quantisation matrix
to integers by division by the corresponding entry in a luminance quantisation matrix  . In our example we use
. In our example we use
The quantisation matrix has to be carefully chosen in order to leave the image at highest possible quality. Quantisation is the lossy part of the compression procedure. The idea is to remove information which should not be “visually significant”. Of course, at this point there is a tradeoff between the compression rate and the quality of the decoded image. So, in JPEG the quantisation table is not included into the standard but must be specified (and hence be encoded).
Quantisation(
)
1FOR
TO7 2DOFOR
TO7 3DO4
RETURN
This quantisation transforms block  to a new block
to a new block  with
with  , where
, where  is the closest integer to
is the closest integer to  . This block will finally be encoded. Observe that in the transformed block
. This block will finally be encoded. Observe that in the transformed block  besides the entry
besides the entry  all other entries are relatively small numbers, which has the effect that
all other entries are relatively small numbers, which has the effect that  mainly consists of
mainly consists of  s .
s .
Coefficient  , in this case
, in this case  ,
deserves special consideration. It is called DC term (direct current),
while the other entries are denoted AC coefficients (alternate
current).
,
deserves special consideration. It is called DC term (direct current),
while the other entries are denoted AC coefficients (alternate
current).
Matrix  will finally be encoded by a Huffman code. We shall only sketch the
procedure. First the DC term will be encoded by the difference to the
DC term of the previously encoded block. For instance, if the previous
DC term was 12, then
will finally be encoded by a Huffman code. We shall only sketch the
procedure. First the DC term will be encoded by the difference to the
DC term of the previously encoded block. For instance, if the previous
DC term was 12, then  will be encoded as
will be encoded as  .
.
After that the AC coefficients are encoded according to the zig-zag order  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , etc.. In our example, this yields the sequence
, etc.. In our example, this yields the sequence  followed by 55 zeros. This zig–zag order exploits the fact that there
are long runs of successive zeros. These runs will be even more
efficiently represented by application of run-length coding, i. e., we encode the number of zeros before the next nonzero element in the sequence followed by this element.
followed by 55 zeros. This zig–zag order exploits the fact that there
are long runs of successive zeros. These runs will be even more
efficiently represented by application of run-length coding, i. e., we encode the number of zeros before the next nonzero element in the sequence followed by this element.
Integers are written in such a way that small numbers have shorter
representations. This is achieved by splitting their representation
into size (number of bits to be reserved) and amplitude (the actual
value). So,  has size
has size  ,
,  and
and  have size
have size  .
.  ,
,  ,
,  , and
, and  have size
have size  , etc.
, etc.
In our example this yields the sequence  for the DC term followed by
for the DC term followed by  ,
,  ,
,  ,
,  ,
,  , and a final
, and a final  as an end-of-block symbol indicating that only zeros follow from now on.
as an end-of-block symbol indicating that only zeros follow from now on.  , for instance, means that there is 1 zero followed by an element of size
, for instance, means that there is 1 zero followed by an element of size  and amplitude
and amplitude  .
.
These pairs are then assigned codewords from a Huffman code. There are different Huffman codes for the pairs (run, size) and for the amplitudes. These Huffman codes have to be specified and hence be included into the code of the image.
In the following pseudocode for the encoding of a single  -block
-block  we shall denote the different Huffman codes by encode-1, encode-2, encode-3.
we shall denote the different Huffman codes by encode-1, encode-2, encode-3.
Run-Length-Code(
)
12
3
4
FOR
TO14 5DOFOR
TOl 6DOIF7
THEN8
ELSE9
IF10
THEN11
ELSE12
13
14
IF15
THEN16
RETURN
At the decoding end matrix  will be reconstructed. Finally, by multiplication of each entry
will be reconstructed. Finally, by multiplication of each entry  by the corresponding entry
by the corresponding entry  from the quantisation matrix
from the quantisation matrix  we obtain an approximation
we obtain an approximation  to the block
to the block  , here
, here
To  the inverse cosine transform is applied. This allows to decode the original
the inverse cosine transform is applied. This allows to decode the original  –block
–block  of the original image – in our example as
of the original image – in our example as
Exercises
3.5-1 Find size and amplitude for the representation of the integers  ,
,  , and
, and  .
.
3.5-2 Write the entries of the following matrix in zig – zag order
How would this matrix be encoded if the difference of the DC term to the previous one was  ?
?
3.5-3 In our example after quantising the sequence  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  has to be encoded. Assume the Huffman codebooks would yield
has to be encoded. Assume the Huffman codebooks would yield  to encode the difference
to encode the difference  from the preceding block's DC,
from the preceding block's DC,  ,
,  , and
, and  for the amplitudes
for the amplitudes  ,
,  , and
, and  , respectively, and
, respectively, and  ,
,  ,
,  , and
, and  for the pairs
for the pairs  ,
,  ,
,  , and
, and  , respectively. What would be the bitstream to be encoded for the
, respectively. What would be the bitstream to be encoded for the  block in our example? How many bits would hence be necessary to compress this block?
block in our example? How many bits would hence be necessary to compress this block?
3.5-4 What would be matrices  ,
,  and
and  , if we had used
, if we had used
for quantising after the cosine transform in the block of our example?
3.5-5 What would be the zig-zag-code in this case (assuming again that the DC term would have difference  from the previous DC term)?
from the previous DC term)?
3.5-6 For any sequence  define a new sequence
define a new sequence  by
by

This sequence can be expanded to a Fourier-series via

Show how the coefficients of the discrete cosine transform

arise from this Fourier series.
PROBLEMS |
3-1 Adaptive Huffman-codes
Dynamic and adaptive Huffman-coding is based on the following property. A binary code tree has the sibling property if each node has a sibling and if the nodes can be listed in order of nonincreasing probabilities with each node being adjacent to its sibling. Show that a binary prefix code is a Huffman-code exactly if the corresponding code tree has the sibling property.
Generalisations of Kraft's inequality
In the proof of Kraft's inequality it is essential to order the lengths  . Show that the construction of a prefix code for given lengths
. Show that the construction of a prefix code for given lengths  is not possible if we are not allowed to order the lengths. This
scenario of unordered lengths occurs with the Shannon-Fano-Elias-code
and in the theory of alphabetic codes, which are related to special
search problems. Show that in this case a prefix code with lengths
is not possible if we are not allowed to order the lengths. This
scenario of unordered lengths occurs with the Shannon-Fano-Elias-code
and in the theory of alphabetic codes, which are related to special
search problems. Show that in this case a prefix code with lengths  exists if and only if
exists if and only if
If
we additionally require the prefix codes to be also suffix-free i. e.,
no codeword is the end of another one, it is an open problem to show
that Kraft's inequality holds with the  on the right–hand side replaced by 3/4, i. e.,
on the right–hand side replaced by 3/4, i. e.,
Redundancy of Krichevsky-Trofimov-estimator
Show that using the Krichevsky-Trofimov-estimator, when parameter  of a discrete memoryless source is unknown, the individual redundancy of sequence
of a discrete memoryless source is unknown, the individual redundancy of sequence  is at most
is at most  for all sequences
for all sequences  and all
and all  .
.
Alternatives to move-to-front-codes
Find further procedures which like move-to-front-coding prepare the text for compression after application of the Burrows-Wheeler-transform.
CHAPTER NOTES |
The frequency table of the letters in English texts is taken from [272]. The Huffman coding algorithm was introduced by Huffman in [119]. A pseudocode can be found in [54], where the Huffman coding algorithm is presented as a special Greedy algorithm. There are also adaptive or dynamic variants of Huffman-coding, which adapt the Huffman-code if it is no longer optimal for the actual frequency table, for the case that the probability distribution of the source is not known in advance. The “3/4-conjecture” on Kraft's inequality for fix-free-codes is due to Ahlswede, Balkenhol, and Khachatrian [4].
Arithmetic coding has been introduced by Rissanen [212] and Pasco [199]. For a discussion of implementation questions see [158],[277]. In the section on modelling we are following the presentation of Willems, Shtarkov and Tjalkens in[275]. The exact calculations can be found in their original paper [274] which received the Best Paper Award of the IEEE Information Theory Society in 1996. The Krichevsky-Trofimov-estimator had been introduced in [153].
We presented the two original algorithms LZ77 and LZ78 [281],[282] due to Lempel and Ziv. Many variants, modifications and extensions have been developed since that – concerning the handling of the dictionary, the pointers, the behaviour after the dictionary is complete, etc. For a description, see, for instance, [25] or [26]. Most of the prominent tools for data compression are variations of Ziv-Lempel-coding. For example “zip” and “gzip” are based on LZ77 and a variant of LZ78 is used by the program “compress”.
The Burrows-Wheeler transform was introduced in the technical report [36]. It became popular in the sequel, especially because of the Unix compression tool “bzip” based on the Burrows-Wheeler-transform, which outperformed most dictionary—based tools on several benchmark files. Also it avoids arithmetic coding, for which patent rights have to be taken into consideration. Further investigations on the Burrows-Wheeler-transform have been carried out, for instance in [21],[70],[155].
We only sketched the basics behind lossy image compression, especially the preparation of the data for application of techniques as Huffman coding. For a detailed discussion we refer to [256], where also the new JPEG2000 standard is described. Our example is taken from [268].
JPEG—short for Joint Photographic Experts Group—is very flexible.
For instance, it also supports lossless data compression. All the
topics presented in the section on image compression are not unique.
There are models involving more basic colours and further transforms
besides the  -transform
(for which even different scaling factors for the chrominance channels
were used, the formula presented here is from [256]).
The cosine transform may be replaced by another operation like a
wavelet transform. Further, there is freedom to choose the quantisation
matrix, responsible for the quality of the compressed image, and the
Huffman code. On the other hand, this has the effect that these
parameters have to be explicitly specified and hence are part of the
coded image.
-transform
(for which even different scaling factors for the chrominance channels
were used, the formula presented here is from [256]).
The cosine transform may be replaced by another operation like a
wavelet transform. Further, there is freedom to choose the quantisation
matrix, responsible for the quality of the compressed image, and the
Huffman code. On the other hand, this has the effect that these
parameters have to be explicitly specified and hence are part of the
coded image.
The ideas behind procedures for video and sound compression are rather similar to those for image compression. In principal, they follow the same steps. The amount of data in these cases, however, is much bigger. Again information is lost by removing irrelevant information not realizable by the human eye or ear (for instance by psychoacoustic models) and by quantising, where the quality should not be reduced significantly. More refined quantising methods are applied in these cases.
Most information on data compression algorithms can be found in literature on Information Theory, for instance [55],[104], since the analysis of the achievable compression rates requires knowledge of source coding theory. Recently, there have appeared several books on data compression, for instance [26],[106],[191],[224],[225], to which we refer to further reading. The benchmark files of the Calgary Corpus and the Canterbury Corpus are available under [37] or [38].
The book of I. Csiszár and J. Körner [58] analyses different aspects of information theory including the problems of data compression too.
Table of Contents
Any planned computation will be subject to different kinds of unpredictable influences during execution. Here are some examples:
-
(1) Loss or change of stored data during execution.
-
(2) Random, physical errors in the computer.
-
(3) Unexpected interactions between different parts of the system working simultaneously, or loss of connections in a network.
-
(4) Bugs in the program.
-
(5) Malicious attacks.
Up to now, it does not seem that the problem of bugs can be solved just with the help of appropriate algorithms. The discipline of software engineering addresses this problem by studying and improving the structure of programs and the process of their creation.
Malicious attacks are addressed by the discipline of computer security. A large part of the recommended solutions involves cryptography.
Problems of kind (3) are very important and a whole discipline, distributed computing has been created to deal with them.
The problem of storage errors is similar to the problems of reliable communication, studied in information theory: it can be viewed as communication from the present to the future. In both cases, we can protect against noise with the help of error-correcting codes (you will see some examples below).
In this chapter, we will discuss some sample problems, mainly from category (2). In this category, distinction should also be made between permanent and transient errors. An error is permanent when a part of the computing device is damaged physically and remains faulty for a long time, until some outside intervention by repairmen to it. It is transient if it happens only in a single step: the part of the device in which it happened is not damaged, in the next step it operates correctly again. For example, if a position in memory turns from 0 to 1 by accident, but a subsequent write operation can write a 0 again then a transient error happened. If the bit turned to 1 and the computer cannot change it to 0 again, this is a permanent error.
Some of these problems, especially the ones for transient errors, are as old as computing. The details of any physical errors depend on the kind of computer it is implemented on (and, of course, on the kind of computation we want to carry out). But after abstracting away from a lot of distracting details, we are left with some clean but challenging theoretical formulations, and some rather pleasing solutions. There are also interesting connections to other disciplines, like statistical physics and biology.
The computer industry has been amazingly successful over the last
five decades in making the computer components smaller, faster, and at
the same time more reliable. Among the daily computer horror stories
seen in the press, the one conspicuously missing is where the processor
wrote a 1 in place of a 0, just out of caprice. (It undisputably
happens, but too rarely to become the identifiable source of some
visible malfunction.) On the other hand, the generality of some of the
results on the correction of transient errors makes them applicable in
several settings. Though individual physical processors are very
reliable (error rate is maybe once in every  executions), when considering a whole network as performing a
computation, the problems caused by unreliable network connections or
possibly malicious network participants is not unlike the problems
caused by unreliable processors.
executions), when considering a whole network as performing a
computation, the problems caused by unreliable network connections or
possibly malicious network participants is not unlike the problems
caused by unreliable processors.
The key idea for making a computation reliable is redundancy, which might be formulated as the following two procedures:
(i) Store information in such a form that losing any small part of it is not fatal: it can be restored using the rest of the data. For example, store it in multiple copies.
(ii) Perform the needed computations repeatedly, to make sure that the faulty results can be outvoted.
Our chapter will only use these methods, but there are other remarkable ideas which we cannot follow up here. For example, method (ii) seems especially costly; it is desireable to avoid a lot of repeated computation. The following ideas target this dilemma.
(A) Perform the computation directly on the information in its redundant form: then maybe recomputations can be avoided.
(B) Arrange the computation into “segments” such a way that those partial results that are to be used later, can be cheaply checked at each “milestone” between segments. If the checking finds error, repeat the last segment.
The present chapter does not require great sophistication in probability theory but there are some facts coming up repeatedly which I will review here. If you need additional information, you will find it in any graduate probability theory text.
A probability space is a triple  where
where  is the set of elementary events,
is the set of elementary events,  is a set of subsets of
is a set of subsets of  called the set of events and
called the set of events and  is a function. For
is a function. For  , the value
, the value  is called the probability of event
is called the probability of event  . It is required that
. It is required that  and that
and that  implies
implies  . Further, if a (possibly infinite) sequence of sets is in
. Further, if a (possibly infinite) sequence of sets is in  then so is their union. Also, it is assumed that
then so is their union. Also, it is assumed that  and that if
and that if  are disjoint then
are disjoint then
For  , the conditional probability of
, the conditional probability of  given
given  is defined as
is defined as

Events  are independent if for any sequence
are independent if for any sequence  we have
we have

Example 4.1 Let  where
where  is the set of all subsets of
is the set of all subsets of  and
and  . This is an example of a discrete probability space: one that has a countable number of elements.
. This is an example of a discrete probability space: one that has a countable number of elements.
More generally, a discrete probability space is given by a countable set  , and a sequence
, and a sequence  with
with  ,
,  . The set
. The set  of events is the set of all subsets of
of events is the set of all subsets of  , and for an event
, and for an event  we define
we define  .
.
A random variable over a probability space  is a function
is a function  from
from  to the real numbers, with the property that every set of the form
to the real numbers, with the property that every set of the form  is an event: it is in
is an event: it is in  . Frequently, random variables are denoted by capital letters
. Frequently, random variables are denoted by capital letters  , possibly with indices, and the argument
, possibly with indices, and the argument  is omitted from
is omitted from  . The event
. The event  is then also written as
is then also written as  . This notation is freely and informally extended to more complicated events. The distribution of a random variable
. This notation is freely and informally extended to more complicated events. The distribution of a random variable  is the function
is the function  .
We will frequently only specify the distribution of our variables, and
not mention the underlying probability space, when it is clear from the
context that it can be specified in one way or another. We can speak
about the joint distribution
of two or more random variables, but only if it is assumed that they
can be defined as functions on a common probability space. Random
variables
.
We will frequently only specify the distribution of our variables, and
not mention the underlying probability space, when it is clear from the
context that it can be specified in one way or another. We can speak
about the joint distribution
of two or more random variables, but only if it is assumed that they
can be defined as functions on a common probability space. Random
variables  with a joint distribution are independent if every
with a joint distribution are independent if every  -tuple of events of the form
-tuple of events of the form  is independent.
is independent.
The expected value of a random variable  taking values
taking values  with probabilities
with probabilities  is defined as
is defined as

It is easy to see that the expected value is a linear function of the random variable:

even if  are not independent. On the other hand, if variables
are not independent. On the other hand, if variables  are independent then the expected values can also be multiplied:
are independent then the expected values can also be multiplied:

There is an important simple inequality called the Markov inequality, which says that for an arbitrary nonnegative random variable  and any value
and any value  we have
we have

In what follows the bounds

will be useful. Of these, the well-known upper bound  holds since the graph of the function
holds since the graph of the function  is below its tangent line drawn at the point
is below its tangent line drawn at the point  . The lower bound is obtained from the identity
. The lower bound is obtained from the identity  and
and

Consider  independent random variables
independent random variables  that are identically distributed, with
that are identically distributed, with

Let

We want to estimate the probability  for any constant
for any constant  . The “law of large numbers” says that if
. The “law of large numbers” says that if  then this probability converges fast to 0 as
then this probability converges fast to 0 as  while if
while if  then it converges fast to 1. Let
then it converges fast to 1. Let


where the inequality (useful for small  and
and  ) comes via
) comes via  and
and  from (4.3). Using the concavity of logarithm, it can be shown that
from (4.3). Using the concavity of logarithm, it can be shown that  is always nonnegative, and is 0 only if
is always nonnegative, and is 0 only if  (see Exercise 4.1-1).
(see Exercise 4.1-1).
Theorem 4.1 (Large deviations for coin-toss) If  then
then

This theorem shows that if  then
then  converges to 0 exponentially fast. Inequality (4.5) will allow the following simplification:
converges to 0 exponentially fast. Inequality (4.5) will allow the following simplification:

useful for small  and
and  .
.
Proof. For a certain real number  (to be chosen later), let
(to be chosen later), let  be the random variable that is
be the random variable that is  if
if  and
and  if
if  , and let
, and let  : then
: then

Applying the Markov inequality (4.2) and (4.1), we get

where  . Let us choose
. Let us choose  , this is
, this is  if
if  . Then we get
. Then we get  , and hence
, and hence

This theorem also yields some convenient estimates for binomial coefficients. Let

This is sometimes called the entropy of the probability distribution  (measured in logarithms over base
(measured in logarithms over base  instead of base 2). From inequality (4.3) we obtain the estimate
instead of base 2). From inequality (4.3) we obtain the estimate

which is useful for small  .
.
 :
:
In particular, taking  with
with  gives
gives

Proof. Theorem 4.1 says for the case  :
:
Substituting  , and noting the symmetries
, and noting the symmetries  ,
,  and (4.7) gives (4.8).
and (4.7) gives (4.8).
Remark 4.3 Inequality (4.6) also follows from the trivial estimate  combined with (4.9).
combined with (4.9).
Exercises
4.1-1 Prove that the statement made in the main text that  is always nonnegative, and is 0 only if
is always nonnegative, and is 0 only if  .
.
4.1-2 For  , derive from Theorem 4.1 the useful bound
, derive from Theorem 4.1 the useful bound

Hint. Let  , and use the Taylor formula:
, and use the Taylor formula:  , where
, where  .
.
4.1-3 Prove that in Theorem 4.1, the assumption that  are independent and identically distributed can be weakened: replaced by the single inequality
are independent and identically distributed can be weakened: replaced by the single inequality

In a model of computation taking errors into account, the natural assumption is that errors occur everywhere. The most familiar kind of computer, which is separated into a single processor and memory, seems extremely vulnerable under such conditions: while the processor is not “looking”, noise may cause irreparable damage in the memory. Let us therefore rather consider computation models that are parallel: information is being processed everywhere in the system, not only in some distinguished places. Then error correction can be built into the work of every part of the system. We will concentrate on the best known parallel computation model: Boolean circuits.
Let us look inside a computer, (actually inside an integrated circuit, with a microscope). Discouraged by a lot of physical detail irrelevant to abstract notions of computation, we will decide to look at the blueprints of the circuit designer, at the stage when it shows the smallest elements of the circuit still according to their computational functions. We will see a network of lines that can be in two states (of electric potential), “high” or “low”, or in other words “true” or “false”, or, as we will write, 1 or 0. The points connected by these lines are the familiar logic components: at the lowest level of computation, a typical computer processes bits. Integers, floating-point numbers, characters are all represented as strings of bits, and the usual arithmetical operations can be composed of bit operations.
Definition 4.4 A Boolean vector function is a mapping  . Most of the time, we will take
. Most of the time, we will take  and speak of a Boolean function.
and speak of a Boolean function.
The variables in  are sometimes called Boolean variables, Boolean variables or bits.
are sometimes called Boolean variables, Boolean variables or bits.
Example 4.2 Given an undirected graph  with
with  nodes, suppose we want to study the question whether it has a Hamiltonian cycle (a sequence
nodes, suppose we want to study the question whether it has a Hamiltonian cycle (a sequence  listing all vertices of
listing all vertices of  such that
such that  is an edge for each
is an edge for each  and also
and also  is an edge). This question is described by a Boolean function
is an edge). This question is described by a Boolean function  as follows. The graph can be described with
as follows. The graph can be described with  Boolean variables
Boolean variables  (
( ):
):  is 1 if and only if there is an edge between nodes
is 1 if and only if there is an edge between nodes  and
and  . We define
. We define  if there is a Hamiltonian cycle in
if there is a Hamiltonian cycle in  and 0 otherwise.
and 0 otherwise.
Example 4.3 [Boolean vector function] Let  , let the input be two integers
, let the input be two integers  , written as
, written as  -bit strings:
-bit strings:  . The output of the function is their product
. The output of the function is their product  (written in binary): if
(written in binary): if  ,
,  then
then  .
.
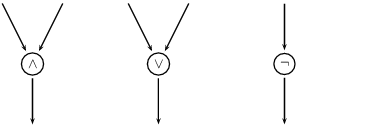
There are only four one-variable Boolean functions: the identically 0, identically 1, the identity and the negation:  . We mention only the following two-variable Boolean functions: the operation of conjunction (logical AND):
. We mention only the following two-variable Boolean functions: the operation of conjunction (logical AND):
this is the same as multiplication. The operation of disjunction, or logical OR:
It is easy to see that  : in other words, disjunction
: in other words, disjunction  can be expressed using the functions
can be expressed using the functions  and the operation of composition. The following two-argument Boolean functions are also frequently used:
and the operation of composition. The following two-argument Boolean functions are also frequently used:

A finite number of Boolean functions is sufficent to express all others: thus, arbitrarily complex Boolean functions can be “computed” by “elementary” operations. In some sense, this is what happens inside computers.
Definition 4.5 A set of Boolean functions is a complete basis if every other Boolean function can be obtained by repeated composition from its elements.
Claim 4.6 The set  forms a complete basis; in other words, every Boolean function can be
represented by a Boolean expression using only these connectives.
forms a complete basis; in other words, every Boolean function can be
represented by a Boolean expression using only these connectives.
The proof can be found in all elementary introductions to propositional logic. Note that since  can be expressed using
can be expressed using  , this latter set is also a complete basis (and so is
, this latter set is also a complete basis (and so is  ).
).
From now on, under a Boolean expression
(formula), we mean an expression built up from elements of some given
complete basis. If we do not mention the basis then the complete basis  will be meant.
will be meant.
In general, one and the same Boolean function can be expressed in many ways as a Boolean expression. Given such an expression, it is easy to compute the value of the function. However, most Boolean functions can still be expressed only by very large Boolean expression (see Exercise 4.2-4).
A Boolean expression is sometimes large since when writing it, there is no possibility for reusing partial results. (For example, in the expression

the part  occurs twice.) This deficiency is corrected by the following more general formalism.
occurs twice.) This deficiency is corrected by the following more general formalism.
A Boolean circuit is essentially an acyclic directed graph, each of whose nodes computes a Boolean function (from some complete basis) of the bits coming into it on its input edges, and sends out the result on its output edges (see Figure 4.2). Let us give a formal definition.
Figure 4.2. The assignment (values on nodes, configuration) gets propagated through all the gates. This is the “computation”.
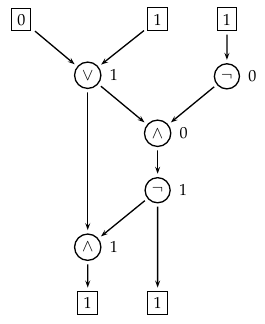
Definition 4.7 Let  be a complete basis of Boolean functions. For an integer
be a complete basis of Boolean functions. For an integer  let
let  be a set of nodes. A Boolean circuit over
be a set of nodes. A Boolean circuit over  is given by the following tuple:
is given by the following tuple:

For every node  there is a natural number
there is a natural number  showing its number of inputs. The sources, nodes
showing its number of inputs. The sources, nodes  with
with  , are called input nodes: we will denote them, in increasing order, as
, are called input nodes: we will denote them, in increasing order, as

To each non-input node  a Boolean function
a Boolean function

from the complete basis  is assigned: it is called the gate of node
is assigned: it is called the gate of node  . It has as many arguments as the number of entering edges. The sinks of the graph, nodes without outgoing edges, will be called output nodes: they can be denoted by
. It has as many arguments as the number of entering edges. The sinks of the graph, nodes without outgoing edges, will be called output nodes: they can be denoted by

(Our Boolean circuits will mostly have just a single output node.) To every non-input node  and every
and every  belongs a node
belongs a node  (the node sending the value of input variable
(the node sending the value of input variable  of the gate of
of the gate of  ). The circuit defines a graph
). The circuit defines a graph  whose set of edges is
whose set of edges is

We require  for each
for each  (we identified the with the natural numbers
(we identified the with the natural numbers  ): this implies that the graph
): this implies that the graph  is acyclic. The size
is acyclic. The size

of the circuit  is the number of nodes. The depth of a node
is the number of nodes. The depth of a node  is the maximal length of directed paths leading from an input node to
is the maximal length of directed paths leading from an input node to  . The depth of a circuit is the maximum depth of its output nodes.
. The depth of a circuit is the maximum depth of its output nodes.
Definition 4.8 An input assignment, or input configuration to our circuit  is a vector
is a vector  with
with  giving value
giving value  to node
to node

for  ,
,  . The function
. The function  can be extended to a unique configuration
can be extended to a unique configuration  on all other nodes of the circuit as follows. If gate
on all other nodes of the circuit as follows. If gate  has
has  arguments then
arguments then

For example, if  , and
, and  (
( ) are the input nodes to
) are the input nodes to  then
then  . The process of extending the configuration by the above equation is also called the computation of the circuit. The vector of the values
. The process of extending the configuration by the above equation is also called the computation of the circuit. The vector of the values  for
for  is the result of the computation. We say that the Boolean circuit computes the vector function
is the result of the computation. We say that the Boolean circuit computes the vector function

The assignment procedure can be performed in stages: in stage  , all nodes of depth
, all nodes of depth  receive their values.
receive their values.
We assign values to the edges as well: the value assigned to an edge is the one assigned to its start node.
The depth of a Boolean circuit can be viewed as the shortest time it takes to compute the output vector from the input vector by this circuit. Az an example application of Boolean circuits, let us develop a circuit that computes the sum of its input bits very fast. We will need this result later in the present chapter for error-correcting purposes.
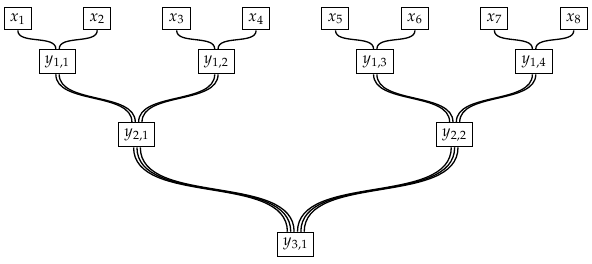
Definition 4.9 We will say that a Boolean circuit computes a near-majority if it outputs a bit  with the following property: if
with the following property: if  of all input bits is equal to
of all input bits is equal to  then
then  .
.
The depth of our circuit is clearly  ,
since the output must have a path to the majority of inputs. In order
to compute the majority, we will also solve the task of summing the
input bits.
,
since the output must have a path to the majority of inputs. In order
to compute the majority, we will also solve the task of summing the
input bits.
(a) Over the complete basis consisting of the set of all 3-argument Boolean functions, for each  there is a Boolean circuit of input size
there is a Boolean circuit of input size  and depth
and depth  whose output vector represents the sum of the input bits as a binary number.
whose output vector represents the sum of the input bits as a binary number.
(b) Over this same complete basis, for each  there is a Boolean circuit of input size
there is a Boolean circuit of input size  and depth
and depth  computing a near-majority.
computing a near-majority.
Proof. First we prove (a). For simplicity, assume  : if
: if  is not of this form, we may add some fake inputs. The naive approach would be proceed according to Figure 4.3: to first compute
is not of this form, we may add some fake inputs. The naive approach would be proceed according to Figure 4.3: to first compute  . Then, to compute
. Then, to compute  , and so on. Then
, and so on. Then  will indeed be computed in
will indeed be computed in  stages.
stages.
It is somewhat troublesome that  here is a number, not a bit, and therefore must be represented by a bit vector, that is by group of nodes in the circuit, not just by a single node. However, the general addition operation
here is a number, not a bit, and therefore must be represented by a bit vector, that is by group of nodes in the circuit, not just by a single node. However, the general addition operation

when performed in the naive way, will typically take more than a constant number of steps: the numbers  have length up to
have length up to  and therefore the addition may add
and therefore the addition may add  to the depth, bringing the total depth to
to the depth, bringing the total depth to  .
.
The following observation helps to decrease the depth. Let  be three numbers in binary notation: for example,
be three numbers in binary notation: for example,  . There are simple parallel formulas to represent the sum of these three numbers as the sum of two others, that is to compute
. There are simple parallel formulas to represent the sum of these three numbers as the sum of two others, that is to compute  where
where  are numbers also in binary notation
are numbers also in binary notation

Since
both formulas are computed by a single 3-argument gate, 3 numbers can
be reduced to 2 (while preserving the sum) in a single parallel
computation step. Two such steps reduce 4 numbers to 2. In  steps therefore they reduce a sum of
steps therefore they reduce a sum of  terms to a sum of 2 numbers of length
terms to a sum of 2 numbers of length  . Adding these two numbers in the regular way increases the depth by
. Adding these two numbers in the regular way increases the depth by  : we found that
: we found that  bits can be be added in
bits can be be added in  steps.
steps.
To prove (b), construct the circuit as in the proof of (a), but without the last addition: the output is two  -bit numbers whose sum we are interested in. The highest-order nonzero bit of these numbers is at some position
-bit numbers whose sum we are interested in. The highest-order nonzero bit of these numbers is at some position  . If the sum is more than
. If the sum is more than  then one these numbers has a nonzero bit at position
then one these numbers has a nonzero bit at position  or
or  . We can determine this in two applications of 3-input gates.
. We can determine this in two applications of 3-input gates.
Exercises
4.2-1 Show that  is a complete basis.
is a complete basis.
4.2-2 Show that the function  forms a complete basis by itself.
forms a complete basis by itself.
4.2-3 Let us fix the complete basis  . Prove Proposition 4.6 (or look up its proof in a textbook). Use it to give an upper bound for an arbitrary Boolean function
. Prove Proposition 4.6 (or look up its proof in a textbook). Use it to give an upper bound for an arbitrary Boolean function  of
of  variables, on:
variables, on:
-
(a) the smallest size of a Boolean expression for
 ;
; -
(b) the smallest size of a Boolean circuit for
 ;
; -
(c) the smallest depth of a Boolean circuit for
 ;
;
4.2-4 Show that for every  there is a Boolean function
there is a Boolean function  of
of  variables such that every Boolean circuit in the complete basis
variables such that every Boolean circuit in the complete basis  computing
computing  contains
contains  nodes.
nodes.
Hint. For a constant  , upperbound the number of Boolean circuits with at most
, upperbound the number of Boolean circuits with at most  nodes and compare it with the number of Boolean functions over
nodes and compare it with the number of Boolean functions over  variables.]
variables.]
4.2-5 Consider a circuit  with
with  inputs, whose single output bit is computed from the inputs by
inputs, whose single output bit is computed from the inputs by  levels of 3-input majority gates. Show that there is an input vector
levels of 3-input majority gates. Show that there is an input vector  which is 1 in only
which is 1 in only  positions but with which
positions but with which  outputs 1. Thus a small minority of the inputs, when cleverly arranged, can command the result of this circuit.
outputs 1. Thus a small minority of the inputs, when cleverly arranged, can command the result of this circuit.
Let  be a Boolean circuit as given in Definition 4.7. When noise is allowed then the values
be a Boolean circuit as given in Definition 4.7. When noise is allowed then the values

will not be determined by the formula (4.11) anymore. Instead, they will be random variables  . The random assignment
. The random assignment  will be called a random configuration.
will be called a random configuration.
Definition 4.11 At vertex  , let
, let

In other words,  if gate
if gate  is not equal to the value computed by the noise-free gate
is not equal to the value computed by the noise-free gate  from its inputs
from its inputs  . (See Figure 4.4.) The set of vertices where
. (See Figure 4.4.) The set of vertices where  is non-zero is the set of faults.
is non-zero is the set of faults.
Let us call the difference  the deviation at node
the deviation at node  .
.
Let us impose conditions on the kind of noise that will be allowed. Each fault should occur only with probability at most  , two specific faults should only occur with probability at most
, two specific faults should only occur with probability at most  , and so on.
, and so on.
Definition 4.12 For an  , let us say that the random configuration
, let us say that the random configuration  is
is  -admissible if
-admissible if
(a)  for
for  .
.
(b) For every set  of non-input nodes, we have
of non-input nodes, we have

In other words, in an  -admissible random configuration, the probability of having faults at
-admissible random configuration, the probability of having faults at  different specific gates is at most
different specific gates is at most  .
This is how we require that not only is the fault probability low but
also, faults do not “conspire”. The admissibility condition is
satisfied if faults occur independently with probability
.
This is how we require that not only is the fault probability low but
also, faults do not “conspire”. The admissibility condition is
satisfied if faults occur independently with probability  .
.
Our goal is to build a circuit that will work correctly, with high probability, despite the ever-present noise: in other words, in which errors do not accumulate. This concept is formalized below.
Definition 4.13 We say that the circuit  with output node
with output node  is
is  -resilient if for all inputs
-resilient if for all inputs  , all
, all  -admissible configurations
-admissible configurations  , we have
, we have  .
.
Let us explore this concept. There is no  -resilient circuit with
-resilient circuit with  , since even the last gate can fail with probability
, since even the last gate can fail with probability  . So, let us, a little more generously, allow
. So, let us, a little more generously, allow  . Clearly, for each circuit
. Clearly, for each circuit  and for each
and for each  we can choose
we can choose  small enough so that
small enough so that  is
is  -resilient.
But this is not what we are after: hopefully, one does not need more
reliable gates every time one builds a larger circuit. So, we hope to
find a function
-resilient.
But this is not what we are after: hopefully, one does not need more
reliable gates every time one builds a larger circuit. So, we hope to
find a function

and an  with the property that for all
with the property that for all  ,
,  , every Boolean circuit
, every Boolean circuit  of size
of size  there is some
there is some  -resilient circuit
-resilient circuit  of size
of size  computing the same function as
computing the same function as  . If we achieve this then we can say that we prevented the accumulation of errors. Of course, we want to make
. If we achieve this then we can say that we prevented the accumulation of errors. Of course, we want to make  relatively small, and
relatively small, and  large (allowing more noise). The function
large (allowing more noise). The function  can be called the redundancy:
the factor by which we need to increase the size of the circuit to make
it resilient. Note that the problem is nontrivial even with, say,
can be called the redundancy:
the factor by which we need to increase the size of the circuit to make
it resilient. Note that the problem is nontrivial even with, say,  . Unless the accumulation of errors is prevented we will lose gradually all information about the desired output, and no
. Unless the accumulation of errors is prevented we will lose gradually all information about the desired output, and no  could be guaranteed.
could be guaranteed.
How can we correct errors? A simple idea is this: do “everything” 3 times and then continue with the result obtained by majority vote.
Definition 4.14 For odd natural number  , a
, a  -input majority gate is a Boolean function that outputs the value equal to the majority of its inputs.
-input majority gate is a Boolean function that outputs the value equal to the majority of its inputs.
Note that a  -input majority can be computed using
-input majority can be computed using  gates of type AND and NOT.
gates of type AND and NOT.
Why should majority voting help? The following informal discussion
helps understanding the benefits and pitfalls. Suppose for a moment
that the output is a single bit. If the probability of each of the
three independently computed results failing is  then the probability that at least
then the probability that at least  of them fails is bounded by
of them fails is bounded by  . Since the majority vote itself can fail with some probability
. Since the majority vote itself can fail with some probability  the total probability of failure is bounded by
the total probability of failure is bounded by  . We decrease the probability
. We decrease the probability  of failure, provided the condition
of failure, provided the condition  holds.
holds.
We found that if  is small, then repetition and majority vote can “make it” smaller. Of
course, in order to keep the error probability from accumulating, we
would have to perform this majority operation repeatedly. Suppose, for
example, that our computation has
is small, then repetition and majority vote can “make it” smaller. Of
course, in order to keep the error probability from accumulating, we
would have to perform this majority operation repeatedly. Suppose, for
example, that our computation has  stages. Our bound on the probability of faulty output after stage
stages. Our bound on the probability of faulty output after stage  is
is  . We plan to perform the majority operation after each stage
. We plan to perform the majority operation after each stage  . Let us perform stage
. Let us perform stage  three times. The probability of failure is now bounded by
three times. The probability of failure is now bounded by

Here, the error probabilities of the different stages accumulate, and even if  we only get a bound
we only get a bound  . So, this strategy will not work for arbitrarily large computations.
. So, this strategy will not work for arbitrarily large computations.
Here is a somewhat mad idea to avoid accumulation: repeat everything before the end of stage  three times, not only stage
three times, not only stage  itself. In this case, the growing bound (4.15) would be replaced with
itself. In this case, the growing bound (4.15) would be replaced with

Now if  and
and  then also
then also  , so errors do not accumulate. But we paid an enormous price: the fault-tolerant version of the computation reaching stage
, so errors do not accumulate. But we paid an enormous price: the fault-tolerant version of the computation reaching stage  is 3 times larger than the one reaching stage
is 3 times larger than the one reaching stage  . To make
. To make  stages fault-tolerant this way will cost a factor of
stages fault-tolerant this way will cost a factor of  in size. This way, the function
in size. This way, the function  introduced above may become exponential in
introduced above may become exponential in  .
.
The theorem below formalizes the above discussion.
Theorem 4.15 Let  be a finite and complete basis for Boolean functions. If
be a finite and complete basis for Boolean functions. If  then every function can be computed by an
then every function can be computed by an  -resilient circuit over
-resilient circuit over  .
.
Proof. For
simplicity, we will prove the result for a complete basis that contains
the three-argument majority function and contains not functions with
more than three arguments. We also assume that faults occur
independently. Let  be a noise-free circuit of depth
be a noise-free circuit of depth  computing function
computing function  . We will prove that there is an
. We will prove that there is an  -resilient circuit
-resilient circuit  of depth
of depth  computing
computing  . The proof is by induction on
. The proof is by induction on  . The sufficient conditions on
. The sufficient conditions on  and
and  will emerge from the proof.
will emerge from the proof.
The statement is certainly true for  , so suppose
, so suppose  . Let
. Let  be the output gate of the circuit
be the output gate of the circuit  , then
, then  . The subcircuits
. The subcircuits  computing the functions
computing the functions  have depth
have depth  . By the inductive assumption, there exist
. By the inductive assumption, there exist  -resilient circuits
-resilient circuits  of depth
of depth  that compute
that compute  . Let
. Let  be a new circuit containing copies of the circuits
be a new circuit containing copies of the circuits  (with the corresponding input nodes merged), with a new node in which
(with the corresponding input nodes merged), with a new node in which  is computed as
is computed as  is applied to the outputs of
is applied to the outputs of  . Then the probability of error of
. Then the probability of error of  is at most
is at most  if
if  since each circuit
since each circuit  can err with probability
can err with probability  and the node with gate
and the node with gate  can fail with probability
can fail with probability  .
.
Let us now form  by taking three copies of
by taking three copies of  (with the inputs merged) and adding a new node computing the majority
of the outputs of these three copies. The error probability of
(with the inputs merged) and adding a new node computing the majority
of the outputs of these three copies. The error probability of  is at most
is at most  .
Indeed, error will be due to either a fault at the majority gate or an
error in at least two of the three independent copies of
.
Indeed, error will be due to either a fault at the majority gate or an
error in at least two of the three independent copies of  . So under condition
. So under condition

the circuit  is
is  -resilient. This condition will be satisfied by
-resilient. This condition will be satisfied by  .
.
The circuit  constructed in the proof above is at least
constructed in the proof above is at least  times larger than
times larger than  .
So, the redundancy is enormous. Fortunately, we will see a much more
economical solution. But there are interesting circuits with small
depth, for which the
.
So, the redundancy is enormous. Fortunately, we will see a much more
economical solution. But there are interesting circuits with small
depth, for which the  factor is not extravagant.
factor is not extravagant.
Theorem 4.16 Over the complete basis consisting of all 3-argument Boolean functions, for all sufficiently small  , if
, if  then for each
then for each  there is an
there is an  -resilient Boolean circuit of input size
-resilient Boolean circuit of input size  , depth
, depth  and size
and size  outputting a near-majority (as given in Definition 4.9).
outputting a near-majority (as given in Definition 4.9).
Proof. Apply Theorem 4.15 to the circuit from part (a) of Theorem 4.10: it gives a new,  -deep
-deep  -resilient circuit computing a near-majority. The size of any such circuit with 3-input gates is at most
-resilient circuit computing a near-majority. The size of any such circuit with 3-input gates is at most 
Exercises
4.3-1 Exercise 4.2-5 suggests that the iterated majority vote  is not safe against manipulation. However, it works very well under some circumstances. Let the input to
is not safe against manipulation. However, it works very well under some circumstances. Let the input to  be a vector
be a vector  of independent Boolean random variables with
of independent Boolean random variables with  . Denote the (random) output bit of the circuit by
. Denote the (random) output bit of the circuit by  . Assuming that our majority gates can fail with probability
. Assuming that our majority gates can fail with probability  independently, prove
independently, prove

Hint. Define  ,
,  ,
,  , and prove
, and prove  .
.
4.3-2 We say that a circuit  computes the function
computes the function  in an
in an  -input-robust way, if the following holds: For any input vector
-input-robust way, if the following holds: For any input vector  , for any vector
, for any vector  of independent Boolean random variables “perturbing it” in the sense
of independent Boolean random variables “perturbing it” in the sense  , for the output
, for the output  of circuit
of circuit  on input
on input  we have
we have  . Show that if the function
. Show that if the function  is computable on an
is computable on an  -input-robust circuit then
-input-robust circuit then  .
.
In this section, we will see ways to introduce fault-tolerance that scale up better. Namely, we will show:
Theorem 4.17 There are constants  such that for
such that for

for all  ,
,  , for every deterministic computation of size
, for every deterministic computation of size  there is an
there is an  -resilient computation of size
-resilient computation of size  with the same result.
with the same result.
Let us introduce a concept that will simplify the error analysis of our circuits, making it independent of the input vector  .
.
Definition 4.18 In a Boolean circuit  , let us call a majority gate at a node
, let us call a majority gate at a node  a correcting majority gate if for every input vector
a correcting majority gate if for every input vector  of
of  , all input wires of node
, all input wires of node  have the same value. Consider a computation of such a circuit
have the same value. Consider a computation of such a circuit  . This computation will make some nodes and wires of
. This computation will make some nodes and wires of  tainted. We define taintedness by the following rules:
tainted. We define taintedness by the following rules:
– The input nodes are untainted.
– If a node is tainted then all of its output wires are tainted.
– A correcting majority gate is tainted if either it fails or a majority of its inputs are tainted.
– Any other gate is tainted if either it fails or one of its inputs is tainted.
Clearly, if for all  -admissible random configurations the output is tainted with probability
-admissible random configurations the output is tainted with probability  then the circuit is
then the circuit is  -resilient.
-resilient.
So far, we have only made use of redundancy idea (ii) of the
introduction to the present chapter: repeating computation steps. Let
us now try to use idea (i) (keeping information in redundant form) in
Boolean circuits. To protect information traveling from gate to gate,
we replace each wire of the noiseless circuit by a “cable” of  wires (where
wires (where  will be chosen appropriately). Each wire within the cable is supposed
to carry the same bit of information, and we hope that a majority will
carry this bit even if some of the wires fail.
will be chosen appropriately). Each wire within the cable is supposed
to carry the same bit of information, and we hope that a majority will
carry this bit even if some of the wires fail.
Definition 4.19 In a Boolean circuit  , a certain set of edges is allowed to be called a cable if in a noise-free computation of this circuit, each edge carries the same Boolean value. The width of the cable is its number of elements. Let us fix an appropriate constant threshold
, a certain set of edges is allowed to be called a cable if in a noise-free computation of this circuit, each edge carries the same Boolean value. The width of the cable is its number of elements. Let us fix an appropriate constant threshold  . Consider any possible computation of the noisy version of the circuit
. Consider any possible computation of the noisy version of the circuit  , and a cable of width
, and a cable of width  in
in  . This cable will be called
. This cable will be called  -safe if at most
-safe if at most  of its wires are tainted.
of its wires are tainted.
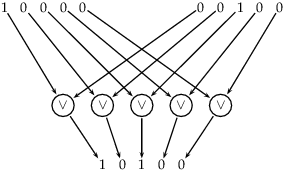
Let us take a Boolean circuit  that we want to make resilient. As we replace wires of
that we want to make resilient. As we replace wires of  with cables of
with cables of  containing
containing  wires each, we will replace each noiseless 2-argument gate at a node
wires each, we will replace each noiseless 2-argument gate at a node  by a module called the executive organ of
by a module called the executive organ of  gates, which for each
gates, which for each  , passes the
, passes the  th wire both incoming cables into the
th wire both incoming cables into the  th node of the organ. Each of these nodes contains a gate of one and the same type
th node of the organ. Each of these nodes contains a gate of one and the same type  . The wires emerging from these nodes form the output cable of the executive organ.
. The wires emerging from these nodes form the output cable of the executive organ.
The number of tainted wires in this output cable may become too high: indeed, if there were  tainted wires in the
tainted wires in the  cable and also in the
cable and also in the  cable then there could be as many as
cable then there could be as many as  such wires in the
such wires in the  cable (not even counting the possible new taints added by faults in the
executive organ). The crucial part of the construction is to attach to
the executive organ a so-called restoring organ: a module intended to decrease the taint in a cable.
cable (not even counting the possible new taints added by faults in the
executive organ). The crucial part of the construction is to attach to
the executive organ a so-called restoring organ: a module intended to decrease the taint in a cable.
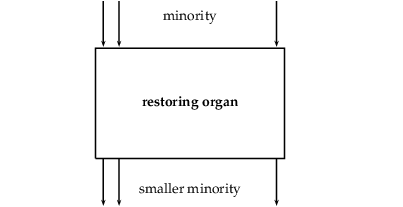
How to build a restoring organ? Keeping in mind that this organ
itself must also work in noise, one solution is to build (for an
approriate  ) a special
) a special  -resilient circuit that computes the near-majority of its
-resilient circuit that computes the near-majority of its  inputs in
inputs in  independent copies. Theorem 4.16 provides a circuit of size
independent copies. Theorem 4.16 provides a circuit of size  to do this.
to do this.
It turns out that, at least asymptotically, there is a better solution. We will look for a very simple restoring organ: one whose own noise we can analyse easily. What could be simpler than a circuit having only one level of gates? We fix an odd positive integer constant  (for example,
(for example,  ). Each gate of our organ will be a
). Each gate of our organ will be a  -input majority gate.
-input majority gate.
Definition 4.20 A multigraph
is a graph in which between any two vertices there may be several
edges, not just 0 or 1. Let us call a bipartite multigraph with  inputs and
inputs and  outputs,
outputs,  -half-regular. if each output node has degree
-half-regular. if each output node has degree  . Such a graph is a
. Such a graph is a  -compressor if it has the following property: for every set
-compressor if it has the following property: for every set  of at most
of at most  inputs, the number of those output points connected to at least
inputs, the number of those output points connected to at least  elements of
elements of  (with multiplicity) is at most
(with multiplicity) is at most  .
.
The compressor property is interesting generally when  . For example, in an
. For example, in an  -compressor the outputs have degree
-compressor the outputs have degree  ,
and the majority operation in these nodes decreases every error set
confined to 10% of all input to just 5% of all outputs. A compressor
with the right parameters could serve as our restoring organ: it
decreases a minority to a smaller minority and may in this way restore
the safety of a cable. But, are there compressors?
,
and the majority operation in these nodes decreases every error set
confined to 10% of all input to just 5% of all outputs. A compressor
with the right parameters could serve as our restoring organ: it
decreases a minority to a smaller minority and may in this way restore
the safety of a cable. But, are there compressors?
Theorem 4.21 For all  , all integers
, all integers  with
with

there is an  such that for all integer
such that for all integer  there is a
there is a  -compressor.
-compressor.
Note that for  , the theorem does not guarantee a compressor with
, the theorem does not guarantee a compressor with  .
.
Proof. We will not give an explicit construction for the multigraph, we will just show that it exists. We will select a  -half-regular multigraph randomly (each such multigraph with the same probability), and show that it will be a
-half-regular multigraph randomly (each such multigraph with the same probability), and show that it will be a  -compressor with positive probability. This proof method is called the probabilistic method. Let
-compressor with positive probability. This proof method is called the probabilistic method. Let

Our construction will be somewhat more general, allowing  outputs. Let us generate a random bipartite
outputs. Let us generate a random bipartite  -half-regular multigraph with
-half-regular multigraph with  inputs and
inputs and  outputs in the following way. To each output, we draw edges from
outputs in the following way. To each output, we draw edges from  random input nodes chosen independently and with uniform distribution over all inputs. Let
random input nodes chosen independently and with uniform distribution over all inputs. Let  be an input set of size
be an input set of size  , let
, let  be an output node and let
be an output node and let  be the event that
be the event that  has
has  or more edges from
or more edges from  . Then we have
. Then we have

On the average (in expected value), the event  will occur for
will occur for  different output nodes
different output nodes  . For an input set
. For an input set  , let
, let  be the event that the set of nodes
be the event that the set of nodes  for which
for which  holds has size
holds has size  . By inequality (4.6) we have
. By inequality (4.6) we have
The number  of sets
of sets  of inputs with
of inputs with  elements is, using inequality (4.7),
elements is, using inequality (4.7),
The
probability that our random graph is not a compressor is at most as
large as the probability that there is at least one input set  for which event
for which event  holds. This can be bounded by
holds. This can be bounded by

where

As we decrease  the first term of this expression dominates. Its coefficient is positive according to the assumption (4.17). We will have
the first term of this expression dominates. Its coefficient is positive according to the assumption (4.17). We will have  if
if

Example 4.4 Choosing  ,
,  , the value
, the value  will work.
will work.
We turn a  -compressor into a restoring organ
-compressor into a restoring organ  , by placing
, by placing  -input majority gates into its outputs. If the majority elements sometimes fail then the output of
-input majority gates into its outputs. If the majority elements sometimes fail then the output of  is random. Assume that at most
is random. Assume that at most  inputs of
inputs of  are tainted. Then
are tainted. Then  outputs can only be tainted if
outputs can only be tainted if  majority gates fail. Let
majority gates fail. Let

be the probability of this event. Assuming that the gates of  fail independently with probability
fail independently with probability  , inequality 4.6 gives
, inequality 4.6 gives

Example 4.5 Choose  ,
,  ,
,  as in Example 4.4, further
as in Example 4.4, further  (this will satisfy the inequality (4.19) needed later). With
(this will satisfy the inequality (4.19) needed later). With  , we get
, we get  .
.
The attractively small degree  led to an extremely unattractive probability bound on the failure of
the whole compressor. This bound does decrease exponentially with cable
width
led to an extremely unattractive probability bound on the failure of
the whole compressor. This bound does decrease exponentially with cable
width  , but only an extremely large
, but only an extremely large  would make it small.
would make it small.
Example 4.6 Choosing again  , but
, but  (voting in each gate of the compressor over 41 wires instead of 7),
leads to somewhat more realistic results. This choice allows
(voting in each gate of the compressor over 41 wires instead of 7),
leads to somewhat more realistic results. This choice allows  . With
. With  ,
,  again, we get
again, we get  .
.
These numbers look less frightening, but we will still need many
scores of wires in the cable to drive down the probability of
compression failure. And although in practice our computing components
fail with frequency much less than  , we may want to look at the largest
, we may want to look at the largest  that still can be tolerated.
that still can be tolerated.
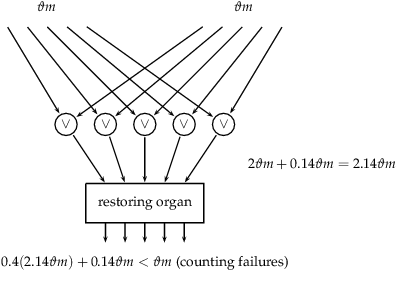
Compressors allow us to construct a reliable Boolean circuit all of whose cables are safe.
Definition 4.22 Given a Boolean circuit  with a single bit of output (for simplicity), a cable width
with a single bit of output (for simplicity), a cable width  and a Boolean circuit
and a Boolean circuit  with
with  inputs and
inputs and  outputs, let
outputs, let

be the Boolean circuit that we obtain as follows. The input nodes of  are the same as those of
are the same as those of  . We replace each wire of
. We replace each wire of  with a cable of width
with a cable of width  , and each gate of
, and each gate of  with an executive organ followed by a restoring organ that is a copy of the circuit
with an executive organ followed by a restoring organ that is a copy of the circuit  . The new circuit has
. The new circuit has  outputs: the outputs of the restoring organ of
outputs: the outputs of the restoring organ of  belonging to the last gate of
belonging to the last gate of  .
.
In noise-free computations, on every input, the output of  is the same as the output of
is the same as the output of  , but in
, but in  identical copies.
identical copies.
Lemma 4.23 There are constants  and for every cable width
and for every cable width  a circuit
a circuit  of size
of size  and gate size
and gate size  with the following property. For every Boolean circuit
with the following property. For every Boolean circuit  of gate size
of gate size  and number of nodes
and number of nodes  , for every
, for every  , for every
, for every  -admissible configuration of
-admissible configuration of  , the probability that not every cable of
, the probability that not every cable of  is
is  -safe is
-safe is  .
.
Proof. We know that there are  and
and  with the property that for all
with the property that for all  a
a  -compressor exists. Let
-compressor exists. Let  be chosen to satisfy
be chosen to satisfy

and define

Let  be a restoring organ built from a
be a restoring organ built from a  -compressor. Consider a gate
-compressor. Consider a gate  of circuit
of circuit  , and the corresponding executive organ and restoring organ in
, and the corresponding executive organ and restoring organ in  . Let us estimate the probability of the event
. Let us estimate the probability of the event  that the input cables of this combined organ are
that the input cables of this combined organ are  -safe but its output cable is not. Assume that the two incoming cables are safe: then at most
-safe but its output cable is not. Assume that the two incoming cables are safe: then at most  of the outputs of the executive organ are tainted due to the incoming cables: new taint can still occur due to failures. Let
of the outputs of the executive organ are tainted due to the incoming cables: new taint can still occur due to failures. Let  be the event that the executive organ taints at least
be the event that the executive organ taints at least  more of these outputs. Then
more of these outputs. Then  , using the estimate (4.18). The outputs of the executive organ are the inputs of the restoring organ. If no more than
, using the estimate (4.18). The outputs of the executive organ are the inputs of the restoring organ. If no more than  of these are tainted then, in case the organ operates perfectly, it would decrease the number of tainted wires to
of these are tainted then, in case the organ operates perfectly, it would decrease the number of tainted wires to  . Let
. Let  be the event that the restoring organ taints an additional
be the event that the restoring organ taints an additional  of these wires. Then again,
of these wires. Then again,  . If neither
. If neither  nor
nor  occur then at most
occur then at most  (see (4.19)) tainted wires emerge from the restoring organ, so the outgoing cable is safe. Therefore
(see (4.19)) tainted wires emerge from the restoring organ, so the outgoing cable is safe. Therefore  and hence
and hence  .
.
Let  be the nodes of the circuit
be the nodes of the circuit  . Since the incoming cables of the whole circuit
. Since the incoming cables of the whole circuit  are safe, the event that there is some cable that is not safe is contained in
are safe, the event that there is some cable that is not safe is contained in  ; hence the probability is bounded by
; hence the probability is bounded by  .
.
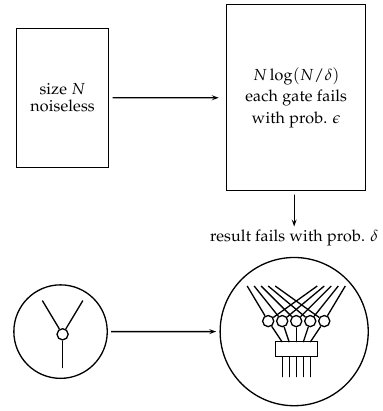
Proof. [Proof of Theorem 4.17]
We will prove the theorem only for the case when our computation is a
Boolean circuit with a single bit of output. The generalization with
more bits of output is straightforward. The proof of Lemma 4.23 gives us a circuit  whose output cable is safe except for an event of probability
whose output cable is safe except for an event of probability  . Let us choose
. Let us choose  in such a way that this becomes
in such a way that this becomes  :
:

It
remains to add a little circuit to this output cable to extract from it
the majority reliably. This can be done using Theorem 4.16, adding a small extra circuit of size  that can be called the coda to
that can be called the coda to  . Let us call the resulting circuit
. Let us call the resulting circuit  .
.
The probability that the output cable is unsafe is  . The probability that the output cable is safe but the “coda” circuit fails is bounded by
. The probability that the output cable is safe but the “coda” circuit fails is bounded by  . So, the probability that
. So, the probability that  fails is
fails is  , by the assumption
, by the assumption  .
.
Let us estimate the size of  . By 4.21, we can choose cable width
. By 4.21, we can choose cable width  . We have
. We have  , hence
, hence

Example 4.7 Take the constants of Example 4.6, with  defined in equation (4.20): then
defined in equation (4.20): then  ,
,  ,
,  ,
,  ,
,  ,
,  , giving
, giving
so making  as small as possible (ignoring that it must be integer), we get
as small as possible (ignoring that it must be integer), we get  . With
. With  ,
,  this allows
this allows  . In addition to this truly unpleasant cable size, the size of the “coda” circuit is
. In addition to this truly unpleasant cable size, the size of the “coda” circuit is  , which dominates the size of the rest of
, which dominates the size of the rest of  (though as
(though as  it becomes asymptotically negligible).
it becomes asymptotically negligible).
As Example 4.7 shows, the actual price in redundancy computable from the proof is unacceptable in practice. The redundancy  sounds good, since it is only logarithmic in the size of the
computation, and by choosing a rather large majority gate (41 inputs),
the factor
sounds good, since it is only logarithmic in the size of the
computation, and by choosing a rather large majority gate (41 inputs),
the factor  in the
in the  here also does not look bad; still, we do not expect the final price of
reliability to be this high. How much can this redundancy improved by
optimization or other methods? Problem 4-6
shows that in a slightly more restricted error model (all faults are
independent and have the same probability), with more randomization,
better constants can be achieved. Exercises 4.4-1, 4.4-2 and 4.4-5 are concerned with an improved construction for the “coda” circuit. Exercise 4.5-2
shows that the coda circuit can be omitted completely. But none of
these improvements bring redundancy to acceptable level. Even aside
from the discomfort caused by their random choice (this can be helped),
concentrators themselves are rather large and unwieldy. The problem is
probably with using circuits as a model for computation. There is no
natural way to break up a general circuit into subunits of non-constant
size in order to deal with the reliability problem in modular style.
here also does not look bad; still, we do not expect the final price of
reliability to be this high. How much can this redundancy improved by
optimization or other methods? Problem 4-6
shows that in a slightly more restricted error model (all faults are
independent and have the same probability), with more randomization,
better constants can be achieved. Exercises 4.4-1, 4.4-2 and 4.4-5 are concerned with an improved construction for the “coda” circuit. Exercise 4.5-2
shows that the coda circuit can be omitted completely. But none of
these improvements bring redundancy to acceptable level. Even aside
from the discomfort caused by their random choice (this can be helped),
concentrators themselves are rather large and unwieldy. The problem is
probably with using circuits as a model for computation. There is no
natural way to break up a general circuit into subunits of non-constant
size in order to deal with the reliability problem in modular style.
This subsection is sketchier than the preceding ones, and assumes some knowledge of linear algebra.
We have shown that compressors exist. How expensive is it to find a  -compressor, say, with
-compressor, say, with  ,
,  ,
,  , as in Example 4.6? In a deterministic algorithm, we could search through all the approximately
, as in Example 4.6? In a deterministic algorithm, we could search through all the approximately 
 -half-regular bipartite graphs. For each of these, we could check all possible input sets of size
-half-regular bipartite graphs. For each of these, we could check all possible input sets of size  : as we know, their number is
: as we know, their number is  . The cost of checking each subset is
. The cost of checking each subset is  , so the total number of operations is
, so the total number of operations is  . Though this number is exponential in
. Though this number is exponential in  , recall that in our error-correcting construction,
, recall that in our error-correcting construction,  for the size
for the size  of the noiseless circuit: therefore the total number of operations needed to find a compressor is polynomial in
of the noiseless circuit: therefore the total number of operations needed to find a compressor is polynomial in  .
.
The proof of Theorem 4.21 shows that a randomly chosen  -half-regular
bipartite graph is a compressor with large probability. Therefore there
is a faster, randomized algorithm for finding a compressor. Pick a
random
-half-regular
bipartite graph is a compressor with large probability. Therefore there
is a faster, randomized algorithm for finding a compressor. Pick a
random  -half-regular
bipartite graph, check if it is a compressor: if it is not, repeat. We
will be done in a constant expected number of repetititons. This is a
faster algorithm, but is still exponential in
-half-regular
bipartite graph, check if it is a compressor: if it is not, repeat. We
will be done in a constant expected number of repetititons. This is a
faster algorithm, but is still exponential in  , since each checking takes
, since each checking takes  operations.
operations.
Is it possible to construct a compressor explicitly, avoiding any search that takes exponential time in  ?
The answer is yes. We will show here only, however, that the compressor
property is implied by a certain property involving linear algebra,
which can be checked in polynomial time. Certain explicitly constructed
graphs are known that possess this property. These are generally sought
after not so much for their compressor property as for their expander property (see the section on reliable storage).
?
The answer is yes. We will show here only, however, that the compressor
property is implied by a certain property involving linear algebra,
which can be checked in polynomial time. Certain explicitly constructed
graphs are known that possess this property. These are generally sought
after not so much for their compressor property as for their expander property (see the section on reliable storage).
For vectors  , let
, let  denote their inner product. A
denote their inner product. A  -half-regular bipartite multigraph with
-half-regular bipartite multigraph with  nodes can be defined by an incidence matrix
nodes can be defined by an incidence matrix  , where
, where  is the number of edges connecting input
is the number of edges connecting input  to output
to output  . Let
. Let  be the vector
be the vector  . Then
. Then  , so
, so  is an eigenvector of
is an eigenvector of  with eigenvalue
with eigenvalue  . Moreover,
. Moreover,  is the largest eigenvalue of
is the largest eigenvalue of  . Indeed, denoting by
. Indeed, denoting by  for any row vector
for any row vector  , we have
, we have  .
.
Theorem 4.24 Let  be a multigraph defined by the matrix
be a multigraph defined by the matrix  . For all
. For all  , and
, and

there is an  such that if the second largest eigenvalue of the matrix
such that if the second largest eigenvalue of the matrix  is
is  then
then  is a
is a  -compressor.
-compressor.
Proof. The matrix  has largest eigenvalue
has largest eigenvalue  . Since it is symmetric, it has a basis of orthogonal eigenvectors
. Since it is symmetric, it has a basis of orthogonal eigenvectors  of unit length with corresponding nonnegative eigenvalues
of unit length with corresponding nonnegative eigenvalues

where  and
and  . Recall that in the orthonormal basis
. Recall that in the orthonormal basis  , any vector
, any vector  can be written as
can be written as  . For an arbitrary vector
. For an arbitrary vector  , we can estimate
, we can estimate  as follows.
as follows.
Let now  be a set of size
be a set of size  and
and  where
where  for
for  and 0 otherwise. Then, coordinate
and 0 otherwise. Then, coordinate  of
of  counts the number
counts the number  of edges coming from the set
of edges coming from the set  to the node
to the node  . Also,
. Also,  , the number of elements of
, the number of elements of  . We get
. We get

Suppose that there are  nodes
nodes  with
with  , then this says
, then this says

Since (4.22) implies  , it follows that
, it follows that  is a
is a  -compressor for small enough
-compressor for small enough  .
.
It is actually sufficient to look for graphs with large  and
and  where
where  are constants. To see this, let us define the product of two bipartite multigraphs with
are constants. To see this, let us define the product of two bipartite multigraphs with  vertices by the multigraph belonging to the product of the corresponding matrices.
vertices by the multigraph belonging to the product of the corresponding matrices.
Suppose that  is symmetric: then its second largest eigenvalue is
is symmetric: then its second largest eigenvalue is  and the ratio of the two largest eigenvalues of
and the ratio of the two largest eigenvalues of  is
is  . Therefore using
. Therefore using  for a sufficiently large
for a sufficiently large  as our matrix, the condition (4.22) can be satisfied. Unfortunately, taking the power will increase the degree
as our matrix, the condition (4.22) can be satisfied. Unfortunately, taking the power will increase the degree  , taking us probably even farther away from practical realizability.
, taking us probably even farther away from practical realizability.
We found that there is a construction of a compressor with the
desired parameters as soon as we find multigraphs with arbitrarily
large sizes  , with symmetric matrices
, with symmetric matrices  and with a ratio of the two largest eigenvalues of
and with a ratio of the two largest eigenvalues of  bounded by a constant
bounded by a constant  independent of
independent of  .
There are various constructions of such multigraphs (see the references
in the historical overview). The estimation of the desired eigenvalue
quotient is never very simple.
.
There are various constructions of such multigraphs (see the references
in the historical overview). The estimation of the desired eigenvalue
quotient is never very simple.
Exercises
4.4-1 The proof of Theorem 4.17 uses a “coda” circuit of size  .
Once we proved this theorem we could, of course, apply it to the
computation of the final majority itself: this would reduce the size of
the coda circuit to
.
Once we proved this theorem we could, of course, apply it to the
computation of the final majority itself: this would reduce the size of
the coda circuit to  . Try out this approach on the numerical examples considered above to see whether it results in a significant improvement.
. Try out this approach on the numerical examples considered above to see whether it results in a significant improvement.
4.4-2 The proof of Theorem 4.21 provided also bipartite graphs with the compressor property, with  inputs and
inputs and  outputs. An idea to build a smaller “coda” circuit in the proof of Theorem 4.17
is to concatenate several such compressors, decreasing the number of
cables in a geometric series. Explore this idea, keeping in mind,
however, that as
outputs. An idea to build a smaller “coda” circuit in the proof of Theorem 4.17
is to concatenate several such compressors, decreasing the number of
cables in a geometric series. Explore this idea, keeping in mind,
however, that as  decreases, the “exponential” error estimate in inequality 4.18 becomes weaker.
decreases, the “exponential” error estimate in inequality 4.18 becomes weaker.
4.4-3 In a noisy Boolean circuit, let  if the gate at vertex
if the gate at vertex  fails and
fails and  otherwise. Further, let
otherwise. Further, let  if
if  is tainted, and 0 otherwise. Suppose that the distribution of the random variables
is tainted, and 0 otherwise. Suppose that the distribution of the random variables  does not depend on the Boolean input vector. Show that then the joint distribution of the random variables
does not depend on the Boolean input vector. Show that then the joint distribution of the random variables  is also independent of the input vector.
is also independent of the input vector.
4.4-4 This exercise extends the result of Exercise 4.3-1
to random input vectors: it shows that if a random input vector has
only a small number of errors, then the iterated majority vote  of Exercise 4.2-5 may still work for it, if we rearrange the input wires randomly. Let
of Exercise 4.2-5 may still work for it, if we rearrange the input wires randomly. Let  , and let
, and let  be a vector of integers
be a vector of integers  . We define a Boolean circuit
. We define a Boolean circuit  as follows. This circuit takes input vector
as follows. This circuit takes input vector  , computes the vector
, computes the vector  where
where  (in other words, just leads a wire from input node
(in other words, just leads a wire from input node  to an “intermediate node”
to an “intermediate node”  ) and then inputs
) and then inputs  into the circuit
into the circuit  .
.
Denote the (possibly random) output bit of  by
by  . For any fixed input vector
. For any fixed input vector  , assuming that our majority gates can fail with probability
, assuming that our majority gates can fail with probability  independently, denote
independently, denote  . Assume that the input is a vector
. Assume that the input is a vector  of (not necessarily independent) Boolean random variables, with
of (not necessarily independent) Boolean random variables, with  . Denoting
. Denoting  , assume
, assume  . Prove that there is a choice of the vector
. Prove that there is a choice of the vector  for which
for which

The choice may depend on the distribution of the random vector  .
.
Hint. Choose the vector  (and hence the circuit
(and hence the circuit  ) randomly, as a random vector
) randomly, as a random vector  where the variables
where the variables  are independent and uniformly distributed over
are independent and uniformly distributed over  , and denote
, and denote  . Then prove
. Then prove

For this, interchange the averaging over  and
and  . Then note that
. Then note that  is the probability of
is the probability of  when the “wires”
when the “wires”  are chosen randomly “on the fly” during the computation of the circuit.
are chosen randomly “on the fly” during the computation of the circuit.
4.4-5 Taking the notation of Exercise 4.4-3 suppose, like there, that the random variables  are independent of each other, and their distribution does not depend on the Boolean input vector. Take the Boolean circuit
are independent of each other, and their distribution does not depend on the Boolean input vector. Take the Boolean circuit  introduced in Definition 4.22, and define the random Boolean vector
introduced in Definition 4.22, and define the random Boolean vector  where
where  if and only if the
if and only if the  th output node is tainted. Apply Exercise 4.4-4 to show that there is a circuit
th output node is tainted. Apply Exercise 4.4-4 to show that there is a circuit  that can be attached to the output nodes to play the role of the “coda” circuit in the proof of Theorem 4.17. The size of
that can be attached to the output nodes to play the role of the “coda” circuit in the proof of Theorem 4.17. The size of  is only linear in
is only linear in  , not
, not  as for the coda circuit in the proof there. But, we assumed a little
more about the fault distribution, and also the choice of the “wiring”'
as for the coda circuit in the proof there. But, we assumed a little
more about the fault distribution, and also the choice of the “wiring”'
 depends on the circuit
depends on the circuit  .
.
There is hardly any simpler computation than not doing anything, just keeping the input unchanged. This task does not fit well, however, into the simple model of Boolean circuits as introduced above.
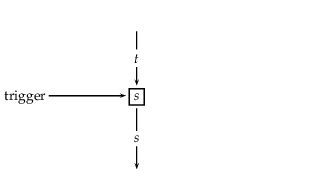
An obvious element of ordinary computations is missing from the above described Boolean circuit model: repetition. If we want to repeat some computation steps, then we need to introduce timing into the work of computing elements and to store
the partial results between consecutive steps. Let us look at the
drawings of the circuit designer again. We will see components like in
Figure 4.9, with one ingoing edge and no operation associated with them; these will be called shift registers. The shift registers are controlled by one central clock
(invisible on the drawing). At each clock pulse, the assignment value
on the incoming edge jumps onto the outgoing edges and “stays in” the
register. Figure 4.10 shows how shift registers may be used inside a circuit.
Definition 4.25 A clocked circuit over a complete basis  is given by a tuple just like a Boolean circuit in 4.10. Also, the circuit defines a graph
is given by a tuple just like a Boolean circuit in 4.10. Also, the circuit defines a graph  similarly. Recall that we identified nodes with the natural numbers
similarly. Recall that we identified nodes with the natural numbers  . To each non-input node
. To each non-input node  either a gate
either a gate  is assigned as before, or a shift register: in this case
is assigned as before, or a shift register: in this case  (there is only one argument). We do not require the graph to be
acyclic, but we do require every directed cycle (if there is any) to
pass through at least one shift register.
(there is only one argument). We do not require the graph to be
acyclic, but we do require every directed cycle (if there is any) to
pass through at least one shift register.
Figure 4.10. Part of a circuit which computes the sum of two binary numbers . We feed the digits of and
beginning with the lowest-order ones, at the input nodes. The digits of
the sum come out on the output edge. A shift register holds the carry.
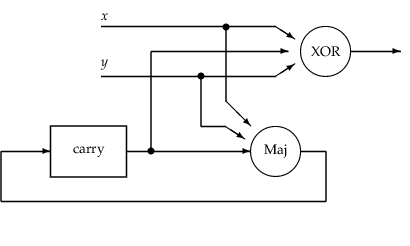
The circuit works in a sequence  of clock cycles. Let us denote the input vector at clock cycle
of clock cycles. Let us denote the input vector at clock cycle  by
by  , the shift register states by
, the shift register states by  , and the output vector by
, and the output vector by  .
The part of the circuit going from the inputs and the shift registers
to the outputs and the shift registers defines two Boolean vector
functions
.
The part of the circuit going from the inputs and the shift registers
to the outputs and the shift registers defines two Boolean vector
functions  and
and  . The operation of the clocked circuit is described by the following equations (see Figure 4.11, which does not show any inputs and outputs).
. The operation of the clocked circuit is described by the following equations (see Figure 4.11, which does not show any inputs and outputs).

Figure 4.11. A “computer” consists of some memory (shift registers) and a Boolean circuit operating on it. We can define the size of computation as the size of the computer times the number of steps.
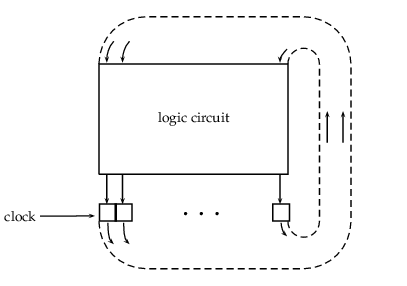
Frequently, we have no inputs or outputs during the work of the circuit, so the equations (4.23) can be simplified to

How to use a clocked circuit described by this equation for computation? We write some initial values into the shift registers, and propagate the assignment using the gates, for the given clock cycle. Now we send a clock pulse to the register, causing it to write new values to their output edges (which are identical to the input edges of the circuit). After this, the new assignment is computed, and so on.
How to compute a function  with the help of such a circuit? Here is a possible convention. We enter the input
with the help of such a circuit? Here is a possible convention. We enter the input  (only in the first step), and then run the circuit, until it signals at an extra output edge when desired result
(only in the first step), and then run the circuit, until it signals at an extra output edge when desired result  can be received from the other output nodes.
can be received from the other output nodes.
Example 4.8 This
example uses a convention different from the above described one: new
input bits are supplied in every step, and the output is also delivered
continuously. For the binary adder of Figure 4.10, let  and
and  be the two input bits in cycle
be the two input bits in cycle  , let
, let  be the content of the carry, and
be the content of the carry, and  be the output in the same cycle. Then the equations (4.23) now have the form
be the output in the same cycle. Then the equations (4.23) now have the form

where  is the majority operation.
is the majority operation.
A clocked circuit is an interesting parallel computer but let us
pose now a task for it that is trivial in the absence of failures:
information storage. We would like to store a certain amount of
information in such a way that it can be recovered after some time,
despite failures in the circuit. For this, the transition function  introduced in (4.24) cannot be just the identity: it will have to perform some error-correcting operations. The restoring organs discussed earlier are natural candidates. Indeed, suppose that we use
introduced in (4.24) cannot be just the identity: it will have to perform some error-correcting operations. The restoring organs discussed earlier are natural candidates. Indeed, suppose that we use  memory cells to store a bit of information. We can call the content of this
memory cells to store a bit of information. We can call the content of this  -tuple safe when the number of memory cells that dissent from the correct value is under some treshold
-tuple safe when the number of memory cells that dissent from the correct value is under some treshold  . Let the rest of the circuit be a restoring organ built on a
. Let the rest of the circuit be a restoring organ built on a  -compressor with
-compressor with  .
Suppose that the input cable is safe. Then the probability that after
the transition, the new output cable (and therefore the new state) is
not safe is
.
Suppose that the input cable is safe. Then the probability that after
the transition, the new output cable (and therefore the new state) is
not safe is  for some constant
for some constant  . Suppose we keep the circuit running for
. Suppose we keep the circuit running for  steps. Then the probability that the state is not safe in some of these steps is
steps. Then the probability that the state is not safe in some of these steps is  which is small as long as
which is small as long as  is significantly smaller than
is significantly smaller than  . When storing
. When storing  bits of information, the probability that any of the bits loses its safety in some step is
bits of information, the probability that any of the bits loses its safety in some step is  .
.
To make this discussion rigorous, an error model must be introduced
for clocked circuits. Since we will only consider simple transition
functions  like the majority vote above, with a single computation step between times
like the majority vote above, with a single computation step between times  and
and  , we will make the model also very simple.
, we will make the model also very simple.
Definition 4.26 Consider a clocked circuit described by equation (4.24), where at each time instant  , the configuration is described by the bit vector
, the configuration is described by the bit vector  . Consider a sequence of random bit vectors
. Consider a sequence of random bit vectors  for
for  . Similarly to (4.13) we define
. Similarly to (4.13) we define

Thus,  says that a failure occurs at the space-time point
says that a failure occurs at the space-time point  . The sequence
. The sequence  will be called
will be called  -admissible if (4.14) holds for every set
-admissible if (4.14) holds for every set  of space-time points with
of space-time points with  .
.
By the just described construction, it is possible to keep  bits of information for
bits of information for  steps in
steps in

memory cells. More precisely, the cable  will be safe with large probability in any admissible evolution
will be safe with large probability in any admissible evolution  (
( ).
).
Cannot we do better? The reliable information storage problem is related to the problem of information transmission: given a message  , a sender wants to transmit it to a receiver throught a noisy channel.
Only now sender and receiver are the same person, and the noisy channel
is just the passing of time. Below, we develop some basic concepts of
reliable information transmission, and then we will apply them to the
construction of a reliable data storage scheme that is more economical
than the above seen naive, repetition-based solution.
, a sender wants to transmit it to a receiver throught a noisy channel.
Only now sender and receiver are the same person, and the noisy channel
is just the passing of time. Below, we develop some basic concepts of
reliable information transmission, and then we will apply them to the
construction of a reliable data storage scheme that is more economical
than the above seen naive, repetition-based solution.
To protect information, we can use redundancy in a way more
efficient than repetition. We might even add only a single redundant
bit to our message. Let  ,
,  be the word we want to protect. Let us create the error check bit
be the word we want to protect. Let us create the error check bit

For example,  . Our codeword
. Our codeword  will be subject to noise and it turns into a new word,
will be subject to noise and it turns into a new word,  . If
. If  differs from
differs from  in a single changed (not deleted or added) bit then we will detect this, since then
in a single changed (not deleted or added) bit then we will detect this, since then  violates the error check relation
violates the error check relation

We will not be able to correct the error, since we do not know which bit was corrupted.
To also correct corrupted bits, we need to add more error check bits. We may try to add two more bits:
Then an uncorrupted word  must satisfy the error check relations
must satisfy the error check relations
or, in matrix notation  , where
, where

Note  . The matrix
. The matrix  is called the error check matrix, or parity check matrix.
is called the error check matrix, or parity check matrix.
Another way to write the error check relations is

Now if  is corrupted, even if only in a single position, unfortunately we still cannot correct it: since
is corrupted, even if only in a single position, unfortunately we still cannot correct it: since  , the error could be in position 1 or 5 and we could not tell the difference. If we choose our error-check matrix
, the error could be in position 1 or 5 and we could not tell the difference. If we choose our error-check matrix  in such a way that the colum vectors
in such a way that the colum vectors  are all different
(of course also from 0), then we can always correct an error, provided
there is only one. Indeed, if the error was in position 3 then
are all different
(of course also from 0), then we can always correct an error, provided
there is only one. Indeed, if the error was in position 3 then

Since all vectors  are different, if we see the vector
are different, if we see the vector  we can imply that the bit
we can imply that the bit  is corrupted. This code is called the Hamming code. For example, the following error check matrix defines the Hamming code of size 7:
is corrupted. This code is called the Hamming code. For example, the following error check matrix defines the Hamming code of size 7:

In general, if we have  error check bits then our code can have size
error check bits then our code can have size  , hence the number of bits left to store information, the information bits is
, hence the number of bits left to store information, the information bits is  . So, to protect
. So, to protect  bits of information from a single error, the Hamming code adds
bits of information from a single error, the Hamming code adds  error check bits. This is much better than repeating every bit 3 times.
error check bits. This is much better than repeating every bit 3 times.
Let us summarize the error-correction scenario in general terms.

In order to fight noise, the sender encodes the message  by an encoding function
by an encoding function  into a longer string
into a longer string  which, for simplicity, we also assume to be binary. This codeword will be changed by noise into a string
which, for simplicity, we also assume to be binary. This codeword will be changed by noise into a string  . The receiver gets
. The receiver gets  and applies to it a decoding function
and applies to it a decoding function  .
.
Definition 4.27 The pair of functions  and
and  is called a code if
is called a code if  holds for all
holds for all  . The strings
. The strings  are called messages, words of the form
are called messages, words of the form  are called codewords. (Sometimes the set of all codewords by itself is also called a code.) For every message
are called codewords. (Sometimes the set of all codewords by itself is also called a code.) For every message  , the set of words
, the set of words  is called the decoding set of
is called the decoding set of  . (Of course, different decoding sets are disjoint.) The number
. (Of course, different decoding sets are disjoint.) The number

is called the rate of the code.
We say that our code that corrects  errors if for all possible messages
errors if for all possible messages  , if the received word
, if the received word  differs from the codeword
differs from the codeword  in at most
in at most  positions, then
positions, then  .
.
If the rate is  then the
then the  -bit codewords carry
-bit codewords carry  bits of useful information. In terms of decoding sets, a code corrects
bits of useful information. In terms of decoding sets, a code corrects  errors if each decoding set
errors if each decoding set  contains all words that differ from
contains all words that differ from  in at most
in at most  symbols (the set of these words is a kind of “ball” of radius
symbols (the set of these words is a kind of “ball” of radius  ).
).
The Hamming code corrects a single error, and its rate is close to 1. One of the important questions connected with error-correcting codes is how much do we have to lower the rate in order to correct more errors.
Having a notion of codes, we can formulate the main result of this section about information storage.
Theorem 4.28 (Network information storage)There are constants  with the following property. For all sufficiently large
with the following property. For all sufficiently large  , there is a code
, there is a code  with message length
with message length  and codeword length
and codeword length  , and a Boolean clocked circuit
, and a Boolean clocked circuit  of size
of size  with
with  inputs and
inputs and  outputs, such that the following holds. Suppose that at time 0, the memory cells of the circuit contain string
outputs, such that the following holds. Suppose that at time 0, the memory cells of the circuit contain string  . Suppose further that the evolution
. Suppose further that the evolution  of the circuit has
of the circuit has  -admissible failures. Then we have
-admissible failures. Then we have

This theorem shows that it is possible to store  bits information for time
bits information for time  , in a clocked circuit of size
, in a clocked circuit of size

As long as the storage time  is below the exponential bound
is below the exponential bound  for a certain constant
for a certain constant  , this circuit size is only a constant times larger than the amount
, this circuit size is only a constant times larger than the amount  of information it stores. (In contrast, in (4.26) we needed an extra factor
of information it stores. (In contrast, in (4.26) we needed an extra factor  when we used a separate restoring organ for each bit.)
when we used a separate restoring organ for each bit.)
The theorem says nothing about how difficult it is to compute the codeword  at the beginning and how difficult it is to carry out the decoding
at the beginning and how difficult it is to carry out the decoding  at the end. Moreover, it is desireable to perform these two operations
also in a noise-tolerant fashion. We will return to the problem of
decoding later.
at the end. Moreover, it is desireable to perform these two operations
also in a noise-tolerant fashion. We will return to the problem of
decoding later.
Since we will be dealing more with bit matrices, it is convenient to introduce the algebraic structure

which is a two-element field. Addition and multiplication in  are defined modulo 2 (of course, for multiplication this is no change). It is also convenient to vest the set
are defined modulo 2 (of course, for multiplication this is no change). It is also convenient to vest the set  of binary strings with the structure
of binary strings with the structure  of an
of an  -dimensional vector space over the field
-dimensional vector space over the field  .
Most theorems and algorithms of basic linear algebra apply to arbitrary
fields: in particular, one can define the row rank of a matrix as the
maximum number of linearly independent rows, and similarly the column
rank. Then it is a theorem that the row rank is equal to the colum
rank. From now on, in algebraic operations over bits or bit vectors, we
will write
.
Most theorems and algorithms of basic linear algebra apply to arbitrary
fields: in particular, one can define the row rank of a matrix as the
maximum number of linearly independent rows, and similarly the column
rank. Then it is a theorem that the row rank is equal to the colum
rank. From now on, in algebraic operations over bits or bit vectors, we
will write  in place of
in place of  unless this leads to confusion. To save space, we will frequently write column vectors horizontally: we write
unless this leads to confusion. To save space, we will frequently write column vectors horizontally: we write
where  denotes the transpose of matrix
denotes the transpose of matrix  . We will write
. We will write

for the identity matrix over the vector space  .
.
Let us generalize the idea of the Hamming code.
Definition 4.29 A code  with message length
with message length  and codeword length
and codeword length  is linear if, when viewing the message and code vectors as vectors over the field
is linear if, when viewing the message and code vectors as vectors over the field  , the encoding function can be computed according to the formula
, the encoding function can be computed according to the formula

with an  matrix
matrix  called the generator matrix of the code. The number
called the generator matrix of the code. The number  is called the the number of information bits in the code, the number
is called the the number of information bits in the code, the number

the number of error-check bits.
Example 4.9 The matrix  in (4.27) can be written as
in (4.27) can be written as  , wit
, wit
Then the error check relation can be written as
This shows that the bits  can be taken to be the message bits, or “information bits”, of the
code, making the Hamming code a linear code with the generator matrix
can be taken to be the message bits, or “information bits”, of the
code, making the Hamming code a linear code with the generator matrix  . (Of course,
. (Of course,  over the field
over the field  .)
.)
The following statement is proved using standard linear algebra, and it generalizes the relation between error check matrix and generator matrix seen in Example 4.9.
Claim 4.30 Let  be given with
be given with  .
.
(a) For every  matrix
matrix  of rank
of rank  over
over  there is a
there is a  matrix
matrix  of rank
of rank  with the property
with the property

(b) For every  matrix
matrix  of rank
of rank  over
over  there is an
there is an  matrix
matrix  of rank
of rank  with property (4.28).
with property (4.28).
Definition 4.31 For a vector  , let
, let  denote the number of its nonzero elements: we will also call it the weight of
denote the number of its nonzero elements: we will also call it the weight of  .
.
In what follows it will be convenient to define a code starting from an error-check matrix  . If the matrix has rank
. If the matrix has rank  then the code has rate
then the code has rate

We can fix any subset  of
of  linearly independent columns, and call the indices
linearly independent columns, and call the indices  error check bits and the indices
error check bits and the indices  the information bits. (In Example 4.9, we chose
the information bits. (In Example 4.9, we chose  .)
Important operations can performed over a code, however, without fixing
any separation into error-check bits and information bits.
.)
Important operations can performed over a code, however, without fixing
any separation into error-check bits and information bits.
Correcting a single error was not too difficult; finding a similar
scheme to correct 2 errors is much harder. However, in storing  bits, typically
bits, typically  (much more than 2) of those bits will be corrupted in every step. There
are ingenious and quite efficient codes of positive rate (independent
of
(much more than 2) of those bits will be corrupted in every step. There
are ingenious and quite efficient codes of positive rate (independent
of  )
correcting even this many errors. When applied to information storage,
however, the error-correction mechanism itself must also work in noise,
so we are looking for a particularly simple one. It works in our favor,
however, that not all errors need to be corrected: it is sufficient to
cut down their number, similarly to the restoring organ in reliable
Boolean circuits above.
)
correcting even this many errors. When applied to information storage,
however, the error-correction mechanism itself must also work in noise,
so we are looking for a particularly simple one. It works in our favor,
however, that not all errors need to be corrected: it is sufficient to
cut down their number, similarly to the restoring organ in reliable
Boolean circuits above.
For simplicity, as gates of our circuit we will allow certain Boolean functions with a large, but constant, number of arguments. On the other hand, our Boolean circuit will have just depth 1, similarly to a restoring organ of Section 4.4. The output of each gate is the input of a memory cell (shift register). For simplicity, we identify the gate and the memory cell and call it a cell. At each clock tick, a cell reads its inputs from other cells, computes a Boolean function on them, and stores the result (till the next clock tick). But now, instead of majority vote among the input values cells, the Boolean function computed by each cell will be slightly more complicated.
Our particular restoring operations will be defined, with the help of a certain  parity check matrix
parity check matrix  . Let
. Let  be a vector of bits. For some
be a vector of bits. For some  , let
, let  (from “vertical”) be the set of those indices
(from “vertical”) be the set of those indices  with
with  . For integer
. For integer  , let
, let  (from “horizontal”) be the set of those indices
(from “horizontal”) be the set of those indices  with
with  . Then the condition
. Then the condition  can also be expressed by saying that for all
can also be expressed by saying that for all  , we have
, we have  . The sets
. The sets  are called the parity check sets belonging to the matrix
are called the parity check sets belonging to the matrix  . From now on, the indices
. From now on, the indices  will be called checks, and the indices
will be called checks, and the indices  locations.
locations.
Definition 4.32 A linear code  is a low-density parity-check code with bounds
is a low-density parity-check code with bounds  if the following conditions are satisfied:
if the following conditions are satisfied:
(a) For each  we have
we have  ;
;
(b) For each  we have
we have  .
.
In other words, the weight of each row is at most  and the weight of each column is at most
and the weight of each column is at most  .
.
In our constructions, we will keep the bounds  constant while the length
constant while the length  of codewords grows. Consider a situation when
of codewords grows. Consider a situation when  is a codeword corrupted by some errors. To check whether bit
is a codeword corrupted by some errors. To check whether bit  is incorrect we may check all the sums
is incorrect we may check all the sums

for all  . If all these sums are 0 then we would not suspect
. If all these sums are 0 then we would not suspect  to be in error. If only one of these is nonzero, we will know that
to be in error. If only one of these is nonzero, we will know that  has some errors but we may still think that the error is not in bit
has some errors but we may still think that the error is not in bit  . But if a significant number of these sums is nonzero then we may suspect that
. But if a significant number of these sums is nonzero then we may suspect that  is a culprit and may want to change it. This idea suggests the following definition.
is a culprit and may want to change it. This idea suggests the following definition.
Definition 4.33 For a low-density parity-check code  with bounds
with bounds  , the refreshing operation associated with the code is the following, to be performed simultaneously for all locations
, the refreshing operation associated with the code is the following, to be performed simultaneously for all locations  :
:
Find out whether more than  of the sums
of the sums  are nonzero among the ones for
are nonzero among the ones for  . If this is the case, flip
. If this is the case, flip  .
.
Let  denote the vector obtained from
denote the vector obtained from  by this operation. For parameters
by this operation. For parameters  , let us call
, let us call  a
a  -refresher if for each vector
-refresher if for each vector  of length
of length  with weight
with weight  the weight of the resulting vector decreases thus:
the weight of the resulting vector decreases thus: 
Notice the similarity of refreshers to compressors. The following lemma shows the use of refreshers, and is an example of the advantages of linear codes.
Lemma 4.34 For an  -refresher
-refresher  , let
, let  be an
be an  -vector and
-vector and  a codeword of length
a codeword of length  with
with  . Then
. Then  .
.
Proof. Since  is a codeword,
is a codeword,  , implying
, implying  . Therefore the error correction flips the same bits in
. Therefore the error correction flips the same bits in  as in
as in  :
:  , giving
, giving  . So, if
. So, if  , then
, then  .
.
Theorem 4.35 There is a parameter  and integers
and integers  such that for all sufficiently large codelength
such that for all sufficiently large codelength  and
and  there is a
there is a  -refresher with at least
-refresher with at least  information bits.
information bits.
In particular, we can choose  ,
,  ,
,  .
.
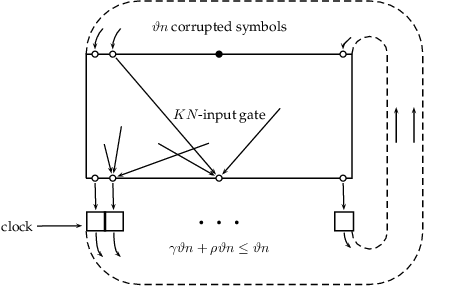
We postpone the proof of this theorem, and apply it first.
Proof. Proof of Theorem 4.28 Theorem 4.35 provides us with a device for information storage. Indeed, we can implement the operation  using a single gate
using a single gate  of at most
of at most  inputs for each bit
inputs for each bit  of
of  . Now as long as the inequality
. Now as long as the inequality  holds for some codeword
holds for some codeword  , the inequality
, the inequality  follows with
follows with  . Of course, some gates will fail and introduce new deviations resulting in some
. Of course, some gates will fail and introduce new deviations resulting in some  rather than
rather than  . Let
. Let  and
and  . Then just as earlier, the probability that there are more than
. Then just as earlier, the probability that there are more than  failures is bounded by the exponentially decreasing expression
failures is bounded by the exponentially decreasing expression  . With fewer than
. With fewer than  new deviations, we will still have
new deviations, we will still have  . The probability that at any time
. The probability that at any time  the number of failures is more than
the number of failures is more than  is bounded by
is bounded by

Example 4.10 Let  . Using the sample values in Theorem 4.35 we can take
. Using the sample values in Theorem 4.35 we can take  ,
,  , so the information rate is
, so the information rate is  . With the corresponding values of
. With the corresponding values of  , and
, and  , we have
, we have  . The probability that there are more than
. The probability that there are more than  failures is bounded by
failures is bounded by

This is exponentially decreasing with  , albeit initially very slowly: it is not really small until
, albeit initially very slowly: it is not really small until  . Still, for
. Still, for  , it gives
, it gives  .
.
In order to use a refresher for information storage, first we need
to enter the encoded information into it, and at the end, we need to
decode the information from it. How can this be done in a noisy
environment? We have nothing particularly smart to say here about
encoding besides the reference to the general reliable computation
scheme discussed earlier. On the other hand, it turns out that if  is sufficiently small then decoding can be avoided altogether.
is sufficiently small then decoding can be avoided altogether.
Recall that in our codes, it is possible to designate certain symbols as information symbols. So, in principle it is sufficient to read out these symbols. The question is only how likely it is that any one of these symbols will be corrupted. The following theorem upperbounds the probability for any symbol to be corrupted, at any time.
Theorem 4.36 For parameters  , integers
, integers  , codelength
, codelength  , with
, with  , consider a
, consider a  -refresher. Build a Boolean clocked circuit
-refresher. Build a Boolean clocked circuit  of size
of size  with
with  inputs and
inputs and  outputs based on this refresher, just as in the proof of Theorem 4.28. Suppose that at time 0, the memory cells of the circuit contain string
outputs based on this refresher, just as in the proof of Theorem 4.28. Suppose that at time 0, the memory cells of the circuit contain string  . Suppose further that the evolution
. Suppose further that the evolution  of the circuit has
of the circuit has  -admissible failures. Let
-admissible failures. Let  be the bits stored at time
be the bits stored at time  . Then
. Then  implies
implies

for some  depending on
depending on  .
.
Remark 4.37 What we are bounding is only the probability of a corrupt symbol in the particular position  . Some of the symbols will certainly be corrupt, but any one symbol one points to will be corrupt only with probability
. Some of the symbols will certainly be corrupt, but any one symbol one points to will be corrupt only with probability  .
.
The upper bound on  required in the condition of the theorem is very severe, underscoring the theoretical character of this result.
required in the condition of the theorem is very severe, underscoring the theoretical character of this result.
Proof. As usual, it is sufficient to assume  . Let
. Let  , and let
, and let  be the set of circuit elements
be the set of circuit elements  which fail at time
which fail at time  . Let us define the following sequence of integers:
. Let us define the following sequence of integers:

It is easy to see by induction

The first members of the sequence  are 1,2,3,4,6,8,11,15,18,24,32, and for
are 1,2,3,4,6,8,11,15,18,24,32, and for  they are 1,1,1,2,2,3,4,5,6,8,11.
they are 1,1,1,2,2,3,4,5,6,8,11.
Lemma 4.38 Suppose that  . Then either there is a time
. Then either there is a time  at which
at which  circuit elements failed, or there is a sequence of sets
circuit elements failed, or there is a sequence of sets  for
for  and
and  with the following properties.
with the following properties.
(a) For  , every element of
, every element of  shares some error-check with some element of
shares some error-check with some element of  . Also every element of
. Also every element of  shares some error-check with some element of
shares some error-check with some element of  .
.
(b) We have  for
for  , on the other hand
, on the other hand  .
.
(c) We have  ,
,  , for all
, for all  , and
, and  .
.
Proof. We will define the sequence  recursively, and will say when to stop. If
recursively, and will say when to stop. If  then we set
then we set  ,
,  , and stop. Suppose that
, and stop. Suppose that  is already defined. Let us define
is already defined. Let us define  (or
(or  if
if  ). Let
). Let  be the set of those
be the set of those  which share some error-check with an element of
which share some error-check with an element of  , and let
, and let  . The refresher property implies that either
. The refresher property implies that either  or
or

In the former case, there must have been some time  with
with  , otherwise
, otherwise  could never become larger than
could never become larger than  . In the latter case, the property
. In the latter case, the property  implies
implies

Now if  then let
then let  be any subset of
be any subset of  with size
with size  (there is one), else let
(there is one), else let  and
and  a set of size
a set of size  (there is one). This construction has the required properties.
(there is one). This construction has the required properties.
For a given  , the number of different choices for
, the number of different choices for  is bounded by
is bounded by

where we used (4.9). Similarly, the number of different choices for  is bounded by
is bounded by

It follows that the number of choices for the whole sequence  is bounded by
is bounded by

On the other hand, the probability for a fixed  to have
to have  is
is  . This way, we can bound the probability that the sequence ends exactly at
. This way, we can bound the probability that the sequence ends exactly at  by
by

where we used (4.29). For small  this gives
this gives

Therefore

where we used  and the property
and the property  for
for  . We can bound the last expression by
. We can bound the last expression by  with an appropriate constantb
with an appropriate constantb  .
.
We found that the event  happens either if there is a time
happens either if there is a time  at which
at which  circuit elements failed (this has probability bound
circuit elements failed (this has probability bound  ) or an event of probability
) or an event of probability  occurs.
occurs.
We will construct our refreshers from bipartite multigraphs with a property similar to compressors: expanders.
Definition 4.39 Here, we will distinguish the two parts of the bipartite (multi) graphs not as inputs and outputs but as left nodes and right nodes. A bipartite multigraph  is
is  -regular if the points of the left set have degree
-regular if the points of the left set have degree  and the points in the right set have degree
and the points in the right set have degree  . Consider such a graph, with the left set having
. Consider such a graph, with the left set having  nodes (then the right set has
nodes (then the right set has  nodes). For a subset
nodes). For a subset  of the left set of
of the left set of  , let
, let  consist of the points connected by some edge to some element of
consist of the points connected by some edge to some element of  . We say that the graph
. We say that the graph  expands
expands  by a factor
by a factor  if we have
if we have  . For
. For  , our graph
, our graph  is an
is an  -expander if
-expander if  expands every subset
expands every subset  of size
of size  of the left set by a factor
of the left set by a factor  .
.
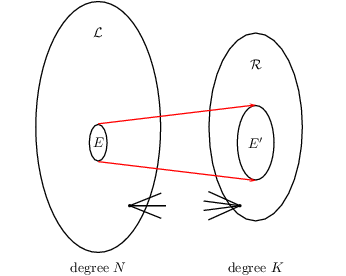
Definition 4.40 Given an  -regular bipartite multigraph
-regular bipartite multigraph  , with left set
, with left set  and right set
and right set  , we assign to it a parity-check code
, we assign to it a parity-check code  as follows:
as follows:  if
if  is connected to
is connected to  , and 0 otherwise.
, and 0 otherwise.
Now for every possible error set  , the set
, the set  describes the set of parity checks that the elements of
describes the set of parity checks that the elements of  participate in. Under some conditions, the lower bound on the size of
participate in. Under some conditions, the lower bound on the size of  guarantees that a sufficient number of errors will be corrected.
guarantees that a sufficient number of errors will be corrected.
Theorem 4.41 Let  be an
be an  -expander with integer
-expander with integer  . Let
. Let  . Then
. Then  is a
is a  -refresher.
-refresher.
Proof. More generally, for any  , let
, let  be an
be an  -expander with integer
-expander with integer  . We will prove that
. We will prove that  is a
is a  -refresher. For an
-refresher. For an  -dimensional bit vector
-dimensional bit vector  with
with  ,
,  , assume
, assume

Our goal is to show  : in other words, that in the corrected vector the number of errors decreases at least by a factor of
: in other words, that in the corrected vector the number of errors decreases at least by a factor of  .
.
Let  be the set of bits in
be the set of bits in  that the error correction operation fails to flip, with
that the error correction operation fails to flip, with  , and
, and  the set of of bits that were 0 but the operation turns them to 1, with
the set of of bits that were 0 but the operation turns them to 1, with  . Our goal is to bound
. Our goal is to bound  . The key observation is that each element of
. The key observation is that each element of  shares at least half of its neighbors with elements of
shares at least half of its neighbors with elements of  , and similarly, each element of
, and similarly, each element of  shares at least half of its neighbors with other elements of
shares at least half of its neighbors with other elements of  . Therefore both
. Therefore both  and
and  contribute relatively weakly to the expansion of
contribute relatively weakly to the expansion of  . Since this expansion is assumed strong, the size of
. Since this expansion is assumed strong, the size of  must be limited.
must be limited.
Let

By expansion,  .
.
First we show  . Assume namely that, on the contrary,
. Assume namely that, on the contrary,  , and let
, and let  be a subset of
be a subset of  such that
such that  (an integer, according to the assumptions of the theorem). By expansion,
(an integer, according to the assumptions of the theorem). By expansion,

Each bit in  has at most
has at most  neighbors that are not neighbors of
neighbors that are not neighbors of  ; so,
; so,

Combining these:

since  . This contradiction with 4.30 shows
. This contradiction with 4.30 shows  .
.
Now  implies (recalling that each element of
implies (recalling that each element of  contributes at most
contributes at most  new neighbors):
new neighbors):


Each  must share at least half of its neighbors with others in
must share at least half of its neighbors with others in  . Therefore
. Therefore  contributes at most
contributes at most  neighbors on its own; the contribution of the other
neighbors on its own; the contribution of the other  must be divided by 2, so the the total contribution of
must be divided by 2, so the the total contribution of  to the neighbors of
to the neighbors of  is at most
is at most  :
:

Combining with (4.31):

Are there expanders good enough for Theorem 4.41? The maximum expansion factor is the degree  and we require a factor of
and we require a factor of  It turns out that random choice works here, too, similarly to the one used in the “construction” of compressors.
It turns out that random choice works here, too, similarly to the one used in the “construction” of compressors.
The choice has to be done in a way that the result is an  -regular bipartite multigraph of left size
-regular bipartite multigraph of left size  . We will start with
. We will start with  left nodes
left nodes  and
and  right nodes
right nodes  . Now we choose a random matching, that is a set of
. Now we choose a random matching, that is a set of  edges with the property that every left node is connected by an edge to
exactly one right node. Let us call the resulting graph
edges with the property that every left node is connected by an edge to
exactly one right node. Let us call the resulting graph  . We obtain
. We obtain  now as follows: we collapse each group of
now as follows: we collapse each group of  left nodes into a single node:
left nodes into a single node:  into one node,
into one node,  into another node, and so on. Similarly, we collapse each group of
into another node, and so on. Similarly, we collapse each group of  right nodes into a single node:
right nodes into a single node:  into one node,
into one node,  into another node, and so on. The edges between any pair of nodes in
into another node, and so on. The edges between any pair of nodes in  are inherited from the ancestors of these nodes in
are inherited from the ancestors of these nodes in  . This results in a graph
. This results in a graph  with
with  left nodes of degree
left nodes of degree  and
and  right nodes of degree
right nodes of degree  . The process may give multiple edges between nodes of
. The process may give multiple edges between nodes of  , this is why
, this is why  is a multigraph. Two nodes of
is a multigraph. Two nodes of  will be called cluster neighbors if they are collapsed to the same node of
will be called cluster neighbors if they are collapsed to the same node of  .
.

Then the above random choice gives an  -expander with positive probability.
-expander with positive probability.
Example 4.11 If  ,
,  then the inequality in the condition of the theorem becomes
then the inequality in the condition of the theorem becomes

Proof. Let  be a set of size
be a set of size  in the left set of
in the left set of  . We will estimate the probability that
. We will estimate the probability that  has too few neighbors. In the above choice of the graph
has too few neighbors. In the above choice of the graph  we might as well start with assigning edges to the nodes of
we might as well start with assigning edges to the nodes of  , in some fixed order of the
, in some fixed order of the  nodes of the preimage of
nodes of the preimage of  in
in  . There are
. There are  edges to assign. Let us call a node of the right set of
edges to assign. Let us call a node of the right set of  occupied if it has a cluster neighbor already reached by an earlier edge. Let
occupied if it has a cluster neighbor already reached by an earlier edge. Let  be a random variable that is 1 if the
be a random variable that is 1 if the  th edge goes to an occupied node and 0 otherwise. There are
th edge goes to an occupied node and 0 otherwise. There are

choices for the  th edge and at most
th edge and at most  of these are occupied. Therefore
of these are occupied. Therefore

Using the large deviations theorem in the generalization given in Exercise 4.1-3, we have, for  :
:

Now, the number of different neighbors of  is
is  , hence
, hence

Let us now multiply this with the number
of sets  of size
of size  :
:

where in the last step we assumed  . This is
. This is  if
if
Substituting  gives the formula of the theorem.
gives the formula of the theorem.
Proof. Proof of Theorem 4.35 Theorem 4.41 shows how to get a refresher from an expander, and Theorem 4.42 shows the existence of expanders for certain parameters. Example 4.11 shows that the parameters can be chosen as needed for the refreshers.
Exercises
4.5-1 Prove Proposition 4.30.
4.5-2 Apply the ideas of the proof of Theorem 4.36 to the proof of Theorem 4.17, showing that the “coda” circuit is not needed: each wire of the output cable carries the correct value with high probability.
PROBLEMS |
Consider a circuit  like in Exercise 4.2-5, assuming that each gate fails with probability
like in Exercise 4.2-5, assuming that each gate fails with probability  independently of all the others and of the input. Assume that the input vector is all 0, and let
independently of all the others and of the input. Assume that the input vector is all 0, and let  be the probability that the circuit outputs a 1. Show that there is a value
be the probability that the circuit outputs a 1. Show that there is a value  with the property that for all
with the property that for all  we have
we have  , and for
, and for  , we have have
, we have have  . Estimate also the speed of convergence in both cases.
. Estimate also the speed of convergence in both cases.
We defined a compressor as a  -halfregular bipartite multigraph. Let us call a compressor regular if it is a
-halfregular bipartite multigraph. Let us call a compressor regular if it is a  -regular multigraph (the input nodes also have degree
-regular multigraph (the input nodes also have degree  ). Prove a theorem similar to Theorem 4.21: for each
). Prove a theorem similar to Theorem 4.21: for each  there is an integer
there is an integer  and an
and an  such that for all integer
such that for all integer  there is a regular
there is a regular  -compressor.
-compressor.
Hint. Choose a random  -regular bipartite multigraph by the following process: (1. Replace each vertex by a group of
-regular bipartite multigraph by the following process: (1. Replace each vertex by a group of  vertices. 2. Choose a random complete matching betwen the new input and output vertices. 3. Merge each group of
vertices. 2. Choose a random complete matching betwen the new input and output vertices. 3. Merge each group of  vertices into one vertex again.) Prove that the probability, over this choice, that a
vertices into one vertex again.) Prove that the probability, over this choice, that a  -regular
multigraph is a not a compressor is small. For this, express the
probability with the help of factorials and estimate the factorials
using Stirling's formula.
-regular
multigraph is a not a compressor is small. For this, express the
probability with the help of factorials and estimate the factorials
using Stirling's formula.
4-3 Two-way expander
Recall the definition of expanders. Call a  -expander regular if it is a
-expander regular if it is a  -regular multigraph (the input nodes also have degree
-regular multigraph (the input nodes also have degree  ). We will call this multigraph a two-way expander if it is an expander in both directions: from
). We will call this multigraph a two-way expander if it is an expander in both directions: from  to
to  and from
and from  to
to  . Prove a theorem similar to the one in Problem 4-2: for all
. Prove a theorem similar to the one in Problem 4-2: for all  there is an
there is an  such that for all integers
such that for all integers  there is a two-way regular
there is a two-way regular  -expander.
-expander.
4-4 Restoring organ from 3-way voting
The proof of Theorem 4.21 did not guarantee a  -compressor with any
-compressor with any  ,
,  .
If we only want to use 3-way majority gates, consider the following
construction. First create a 3-halfregular bipartite graph
.
If we only want to use 3-way majority gates, consider the following
construction. First create a 3-halfregular bipartite graph  with inputs
with inputs  and outputs
and outputs  , with a 3-input majority gate in each
, with a 3-input majority gate in each  . Then create new nodes
. Then create new nodes  , with a 3-input majority gate in each
, with a 3-input majority gate in each  . The gate of
. The gate of  computes the majority of
computes the majority of  , the gate of
, the gate of  computes the majority of
computes the majority of  , and so on. Calculate whether a random choice of the graph
, and so on. Calculate whether a random choice of the graph  will turn the circuit with inputs
will turn the circuit with inputs  and outputs
and outputs  into a restoring organ. Then consider three stages instead of two, where
into a restoring organ. Then consider three stages instead of two, where  has
has  outputs and see what is gained.
outputs and see what is gained.
4-5 Restoring organ from NOR gates
The majority gate is not the only gate capable of strengthening the majority. Recall the NOR gate introduced in Exercise 4.2-2, and form  . Show that a construction similar to Problem 4-4 can be carried out with
. Show that a construction similar to Problem 4-4 can be carried out with  used in place of 3-way majority gates.
used in place of 3-way majority gates.
4-6 More randomness, smaller restoring organs
Taking the notation of Exercise 4.4-3, suppose like there, that the random variables  are independent of each other, and their distribution does not depend on the Boolean input vector. Apply the idea of Exercise 4.4-5
to the construction of each restoring organ. Namely, construct a
different restoring organ for each position: the choice depends on the
circuit preceding this position. Show that in this case, our error
estimates can be significantly improved. The improvement comes, just as
in Exercise 4.4-5, since now we do not have to multiply the error probability by the number of all possible sets of size
are independent of each other, and their distribution does not depend on the Boolean input vector. Apply the idea of Exercise 4.4-5
to the construction of each restoring organ. Namely, construct a
different restoring organ for each position: the choice depends on the
circuit preceding this position. Show that in this case, our error
estimates can be significantly improved. The improvement comes, just as
in Exercise 4.4-5, since now we do not have to multiply the error probability by the number of all possible sets of size  of tainted wires. Since we know the distribution of this set, we can average over it.
of tainted wires. Since we know the distribution of this set, we can average over it.
4-7 Near-sorting with expanders
In this problem, we show that expanders can be used for “near-sorting”. Let  be a regular two-way
be a regular two-way  -expander, whose two parts of size
-expander, whose two parts of size  are
are  and
and  . According to a theorem of Kőnig, (the edge-set of) every
. According to a theorem of Kőnig, (the edge-set of) every  -regular bipartite multigraph is the disjoint union of (the edge-sets of)
-regular bipartite multigraph is the disjoint union of (the edge-sets of)  complete matchings
complete matchings  . To such an expander, we assign a Boolean circuit of depth
. To such an expander, we assign a Boolean circuit of depth  as follows. The circuit's nodes are subdivide into levels
as follows. The circuit's nodes are subdivide into levels  . On level
. On level  we have two disjoint sets
we have two disjoint sets  of size
of size  of nodes
of nodes  ,
,  (
( ). The Boolean value on
). The Boolean value on  will be
will be  and
and  respectively. Denote the vector of
respectively. Denote the vector of  values at stage
values at stage  by
by  . If
. If  is an edge in the matching
is an edge in the matching  , then we put an
, then we put an  gate into
gate into  , and a
, and a  gate into
gate into  :
:

This network is trying to “sort” the 0's to  and the 1's to
and the 1's to  in
in  stages. More generally, the values in the vectors
stages. More generally, the values in the vectors  could be arbitrary numbers. Then if
could be arbitrary numbers. Then if  still means
still means  and
and  means
means  then each vector
then each vector  is a permutation of the vector
is a permutation of the vector  . Let
. Let  . Prove that
. Prove that  is
is  -sorted in the sense that for all
-sorted in the sense that for all  , at least
, at least  among the
among the  smallest values of
smallest values of  is in its left half and at least
is in its left half and at least  among the
among the  largest values are in its right half.
largest values are in its right half.
4-8 Restoring organ from near-sorters
Develop a new restoring organ using expanders, as follows. First, split each wire of the input cable  , to get two sets
, to get two sets  . Attach the
. Attach the  -sorter of Problem 4-7, getting outputs
-sorter of Problem 4-7, getting outputs  . Now split the wires of
. Now split the wires of  into two sets
into two sets  . Attach the
. Attach the  -sorter again, getting outputs
-sorter again, getting outputs  . Keep only
. Keep only  for the output cable. Show that the Boolean vector circuit leading from
for the output cable. Show that the Boolean vector circuit leading from  to
to  can be used as a restoring organ.
can be used as a restoring organ.
CHAPTER NOTES |
The large deviation theorem (Theorem 4.1), or theorems similar to it, are sometimes attributed to Chernoff or Bernstein. One of its frequently used variants is given in Exercise 4.1-2.
The problem of reliable computation with unreliable components was addressed by John von Neumann in [192] on the model of logic circuits. A complete proof of the result of that paper (with a different restoring organ) appeare first in the paper [63] of R. L. Dobrushin and S. I. Ortyukov. Our presentation relied on parts of the paper [205] of N. Pippenger.
The lower-bound result of Dobrushin and Ortyukov in the paper [62] (corrected in [203], [211] and [85]), shows that reduncancy of  is unavoidable for a general reliable computation whose complexity is
is unavoidable for a general reliable computation whose complexity is  .
However, this lower bound only shows the necessity of putting the input
into a redundantly encoded form (otherwise critical information may be
lost in the first step). As shown in [205], for many important function classes, linear redundancy is achievable.
.
However, this lower bound only shows the necessity of putting the input
into a redundantly encoded form (otherwise critical information may be
lost in the first step). As shown in [205], for many important function classes, linear redundancy is achievable.
It seems natural to separate the cost of the initial encoding: it
might be possible to perform the rest of the computation with much less
redundancy. An important step in this direction has been made by D.
Spielman in the paper [248] in (essentially) the clocked-circuit model. Spielman takes a parallel computation with time  running on
running on  elementary components and makes it reliable using only
elementary components and makes it reliable using only  times more processors and running it
times more processors and running it  times longer. The failure probability will be
times longer. The failure probability will be  . This is small as long as
. This is small as long as  is not much larger than
is not much larger than  . So, the redundancy is bounded by some power of the logarithm of the space requirement;
the time requirement does not enter explictly. In Boolean circuits no
time- and space- complexity is defined separately. The size of the
circuit is analogous to the quantity obtained in other models by taking
the product of space and time complexity.
. So, the redundancy is bounded by some power of the logarithm of the space requirement;
the time requirement does not enter explictly. In Boolean circuits no
time- and space- complexity is defined separately. The size of the
circuit is analogous to the quantity obtained in other models by taking
the product of space and time complexity.
Questions more complex than Problem 4-1 have been studied in [204]. The method of Problem 4-2, for generating random  -regular multigraphs is analyzed for example in [27]. It is much harder to generate simple regular graphs (not multigraphs) uniformly. See for example [143].
-regular multigraphs is analyzed for example in [27]. It is much harder to generate simple regular graphs (not multigraphs) uniformly. See for example [143].
The result of Exercise 4.2-4 is due to C. Shannon, see [234]. The asymptotically best circuit size for the worst functions was found by Lupanov in [170]. Exercise 4.3-1 is based on [63], and Exercise 4.3-2 is based on [62] (and its corrections).
Problem 4-7 is based on the starting idea of the  depth sorting networks in [9].
depth sorting networks in [9].
For storage in Boolean circuits we partly relied on A. V. Kuznietsov's paper [156] (the main theorem, on the existence of refreshers is from M. Pinsker). Low density parity check codes were introduced by R. G. Gallager in the book[80], and their use in reliable storage was first suggested by M. G. Taylor in the paper [257]. New, constructive versions of these codes were developed by M. Sipser and D. Spielman in the paper [247], with superfast coding and decoding.
Expanders, invented by Pinsker in [202] have been used extensively in theoretical computer science: see for example[188] for some more detail. This book also gives references on the construction of graphs with large eigenvalue-gap. Exercise 4.4-4 and Problem 4-6 are based on [63].
The use of expanders in the role of refreshers was suggested by
Pippenger (private communication): our exposition follows Sipser and
Spielman in [243]. Random expanders were found for example by Pinsker. The needed expansion rate ( times the left degree) is larger than what can be implied from the size of the eigenvalue gap. As shown in [202] (see the proof in Theorem 4.42)
random expanders have the needed expansion rate. Lately, constructive
expanders with nearly maximal expansion rate were announced by Capalbo,
Reingold, Vadhan and Wigderson in [39].
times the left degree) is larger than what can be implied from the size of the eigenvalue gap. As shown in [202] (see the proof in Theorem 4.42)
random expanders have the needed expansion rate. Lately, constructive
expanders with nearly maximal expansion rate were announced by Capalbo,
Reingold, Vadhan and Wigderson in [39].
Reliable computation is also possible in a model of parallel computation that is much more regular than logic circuits: in cellular automata. We cannot present those results here: see for example the papers [84], [86].
Table of Contents
- 5. Algebra
- 6. Computer Algebra
- 7. Cryptology
- 8. Complexity Theory
Table of Contents
First, in this chapter, we will discuss some of the basic concepts of algebra, such as fields, vector spaces and polynomials (Section 5.1). Our main focus will be the study of polynomial rings in one variable. These polynomial rings play a very important role in constructive applications. After this, we will outline the theory of finite fields, putting a strong emphasis on the problem of constructing them (Section 5.2) and on the problem of factoring polynomials over such fields (Section 5.3). Then we will study lattices and discuss the Lenstra-Lenstra-Lovász algorithm which can be used to find short lattice vectors (Section 5.4). We will present a polynomial time algorithm for the factorisation of polynomials with rational coefficients; this was the first notable application of the Lenstra-Lenstra-Lovász algorithm (Section 5.5).
In this section we will overview some important concepts related to rings and polynomials.
We recall some definitions introduced in Chapters 31–33 of the textbook Introduction to Algorithms. In the sequel all cross references to Chapters 31–33 refer to results in that book.
A set  with at least two elements is called a ring, if it has two binary operations, the addition, denoted by the
with at least two elements is called a ring, if it has two binary operations, the addition, denoted by the  sign, and the multiplication, denoted by the
sign, and the multiplication, denoted by the  sign. The elements of
sign. The elements of  form an Abelian group with respect to the addition, and they form a
monoid (that is, a semigroup with an identity), whose identity element
is denoted by 1, with respect to the multiplication. We assume that
form an Abelian group with respect to the addition, and they form a
monoid (that is, a semigroup with an identity), whose identity element
is denoted by 1, with respect to the multiplication. We assume that  . Further, the distributive properties also hold: for arbitrary elements
. Further, the distributive properties also hold: for arbitrary elements  we have
we have


Being an Abelian group with respect to the addition means that the operation is associative, commutative, it has an identity element (denoted by 0), and every element has an inverse with respect to this identity. More precisely, these requirements are the following:
associative property: for all triples  we have
we have  ;
;
commutative property: for all pairs  we have
we have  ;
;
existence of the identity element: for the zero element  of
of  and for all elements
and for all elements  of
of  , we have
, we have  ;
;
existence of the additive inverse: for all  there exists
there exists  , such that
, such that  .
.
It is easy to show that each of the elements  in
in  has a unique inverse. We usually denote the inverse of an element
has a unique inverse. We usually denote the inverse of an element  by
by  .
.
Concerning the multiplication, we require that it must be associative and that the multiplicative identity should exist. The identity of a ring  is the multiplicative identity of
is the multiplicative identity of  . The usual name of the additive identity is zero. We usually omit the
. The usual name of the additive identity is zero. We usually omit the  sign when writing the multiplication, for example we usually write
sign when writing the multiplication, for example we usually write  instead of
instead of  .
.
(i) The set  of integers with the usual operations
of integers with the usual operations  and
and  .
.
(ii) The set  of residue classes modulo
of residue classes modulo  with respect to the addition and multiplication modulo
with respect to the addition and multiplication modulo  .
.
(iii) The set  of
of  -matrices with real entries with respect to the addition and multiplication of matrices.
-matrices with real entries with respect to the addition and multiplication of matrices.
Let  and
and  be rings. A map
be rings. A map  is said to be a homomorphism, if
is said to be a homomorphism, if  preserves the operations, in the sense that
preserves the operations, in the sense that  and
and  holds for all pairs
holds for all pairs  . A homomorphism
. A homomorphism  is called an isomorphism, if
is called an isomorphism, if  is a one-to-one correspondence, and the inverse is also a homomorphism. We say that the rings
is a one-to-one correspondence, and the inverse is also a homomorphism. We say that the rings  and
and  are isomorphic, if there is an isomorphism between them. If
are isomorphic, if there is an isomorphism between them. If  and
and  are isomorphic rings, then we write
are isomorphic rings, then we write  . From an algebraic point of view, isomorphic rings can be viewed as identical.
. From an algebraic point of view, isomorphic rings can be viewed as identical.
For example the map  which maps an integer to its residue modulo 6 is a homomorphism:
which maps an integer to its residue modulo 6 is a homomorphism:  , etc.
, etc.
A useful and important ring theoretic construction is the direct sum. The direct sum of the rings  and
and  is denoted by
is denoted by  . The underlying set of the direct sum is
. The underlying set of the direct sum is  , that is, the set of ordered pairs
, that is, the set of ordered pairs  where
where  . The operations are defined componentwise: for
. The operations are defined componentwise: for  we let
we let


Easy calculation shows that  is a ring with respect to the operations above. This construction can
easily be generalised to more than two rings. In this case, the
elements of the direct sum are the
is a ring with respect to the operations above. This construction can
easily be generalised to more than two rings. In this case, the
elements of the direct sum are the  -tuples, where
-tuples, where  is the number of rings in the direct sum, and the operations are defined componentwise.
is the number of rings in the direct sum, and the operations are defined componentwise.
A ring  is said to be a field,
if its non-zero elements form an Abelian group with respect to the
multiplication. The multiplicative inverse of a non-zero element
is said to be a field,
if its non-zero elements form an Abelian group with respect to the
multiplication. The multiplicative inverse of a non-zero element  is usually denoted
is usually denoted  .
.
The best-known examples of fields are the the sets of rational
numbers, real numbers, and complex numbers with respect to the usual
operations. We usually denote these fields by  , respectively.
, respectively.
Another important class of fields consists of the fields  of
of  -elements where
-elements where  is a prime number. The elements of
is a prime number. The elements of  are the residue classes modulo
are the residue classes modulo  ,
and the operations are the addition and the multiplication defined on
the residue classes. The distributive property can easily be derived
from the distributivity of the integer operations. By Theorem 33.12,
,
and the operations are the addition and the multiplication defined on
the residue classes. The distributive property can easily be derived
from the distributivity of the integer operations. By Theorem 33.12,  is a group with respect to the addition, and, by Theorem 33.13, the set
is a group with respect to the addition, and, by Theorem 33.13, the set  of non-zero elements of
of non-zero elements of  is a group with respect to the multiplication. In order to prove this latter claim, we need to use that
is a group with respect to the multiplication. In order to prove this latter claim, we need to use that  is a prime number.
is a prime number.
In an arbitrary field, we may consider the set of elements of the form  , that is, the set of elements that can be written as the sum
, that is, the set of elements that can be written as the sum  of
of  copies of the multiplicative identity where
copies of the multiplicative identity where  is a positive integer. Clearly, one of the two possibilities must hold:
is a positive integer. Clearly, one of the two possibilities must hold:
(a) none of the elements  is zero;
is zero;
(b)  is zero for some
is zero for some  .
.
In case (a) we say that  is a field with characteristic zero. In case (b) the characteristic of
is a field with characteristic zero. In case (b) the characteristic of  is the smallest
is the smallest  such that
such that  . In this case, the number
. In this case, the number  must be a prime, for, if
must be a prime, for, if  , then
, then  , and so either
, and so either  or
or  .
.
Suppose that  denotes the smallest subfield of
denotes the smallest subfield of  that contains
that contains  . Then
. Then  is said to be the prime field of
is said to be the prime field of  . In case (a) the subfield
. In case (a) the subfield  consists of the elements
consists of the elements  where
where  is an integer and
is an integer and  is a positive integer. In this case,
is a positive integer. In this case,  is isomorphic to the field
is isomorphic to the field  of rational numbers. The identification is obvious:
of rational numbers. The identification is obvious:  .
.
In case (b) the characteristic is a prime number, and  is the set of elements
is the set of elements  where
where  . In this case,
. In this case,  is isomorphic to the field
is isomorphic to the field  of residue classes modulo
of residue classes modulo  .
.
Let  be a field. An additively written Abelian group
be a field. An additively written Abelian group  is said to be a vector space over
is said to be a vector space over  , or simply an
, or simply an  -vector space, if for all elements
-vector space, if for all elements  and
and  , an element
, an element  is defined (in other words,
is defined (in other words,  acts on
acts on  ) and the following hold:
) and the following hold:


Here  are arbitrary elements of
are arbitrary elements of  , the elements
, the elements  are arbitrary in
are arbitrary in  , and the element 1 is the multiplicative identity of
, and the element 1 is the multiplicative identity of  .
.
The space of  -matrices over
-matrices over  is an important example of vector spaces. Their properties are studied in Chapter 31.
is an important example of vector spaces. Their properties are studied in Chapter 31.
A vector space  over a field
over a field  is said to be finite-dimensional if there is a collection
is said to be finite-dimensional if there is a collection  of finitely many elements in
of finitely many elements in  such that each of the elements
such that each of the elements  can be written as a linear combination
can be written as a linear combination  for some
for some  . Such a set
. Such a set  is called a generating set of
is called a generating set of  . The cardinality of the smallest generating set of
. The cardinality of the smallest generating set of  is referred to as the dimension of
is referred to as the dimension of  over
over  , denoted
, denoted  . In a finite-dimensional vector space, a generating system containing
. In a finite-dimensional vector space, a generating system containing  elements is said to be a basis.
elements is said to be a basis.
A set  of elements of a vector space
of elements of a vector space  is said to be linearly independent, if, for
is said to be linearly independent, if, for  , the equation
, the equation  implies
implies  . It is easy to show that a basis in
. It is easy to show that a basis in  is a linearly independent set. An important property of linearly
independent sets is that such a set can be extended to a basis of the
vector space. The dimension of a vector space coincides with the
cardinality of its largest linearly independent set.
is a linearly independent set. An important property of linearly
independent sets is that such a set can be extended to a basis of the
vector space. The dimension of a vector space coincides with the
cardinality of its largest linearly independent set.
A non-empty subset  of a vector space
of a vector space  is said to be a subspace of
is said to be a subspace of  , if it is an (additive) subgroup of
, if it is an (additive) subgroup of  , and
, and  holds for all
holds for all  and
and  . It is obvious that a subspace can be viewed as a vector space.
. It is obvious that a subspace can be viewed as a vector space.
The concept of homomorphisms can be defined for vector spaces, but in this context we usually refer to them as linear maps. Let  and
and  be vector spaces over a common field
be vector spaces over a common field  . A map
. A map  is said to be linear, if, for all
is said to be linear, if, for all  and
and  , we have
, we have

The linear mapping  is an isomorphism if
is an isomorphism if  is a one-to-one correspondence and its inverse is also a homomorphism.
Two vector spaces are said to be isomorphic if there is an isomorphism
between them.
is a one-to-one correspondence and its inverse is also a homomorphism.
Two vector spaces are said to be isomorphic if there is an isomorphism
between them.
Lemma 5.1 Suppose that  is a linear mapping. Then
is a linear mapping. Then  is a subspace in
is a subspace in  . If
. If  is one-to-one, then
is one-to-one, then  . If, in this case,
. If, in this case,  , then
, then  and the mapping
and the mapping  is an isomorphism.
is an isomorphism.

we obtain that  is a subspace. Further, it is clear that the images of the elements of a generating set of
is a subspace. Further, it is clear that the images of the elements of a generating set of  form a generating set for
form a generating set for  . Let us now suppose that
. Let us now suppose that  is one-to-one. In this case, the image of a linearly independent subset of
is one-to-one. In this case, the image of a linearly independent subset of  is linearly independent in
is linearly independent in  . It easily follows from these observations that the image of a basis of
. It easily follows from these observations that the image of a basis of  is a basis of
is a basis of  , and so
, and so  . If we assume, in addition, that
. If we assume, in addition, that  , then a basis of
, then a basis of  is also a basis of
is also a basis of  , as it is a linearly independent set, and so it can be extended to a basis of
, as it is a linearly independent set, and so it can be extended to a basis of  . Thus
. Thus  and the mapping
and the mapping  must be a one-to-one correspondence. It is easy to see, and is left to the reader, that
must be a one-to-one correspondence. It is easy to see, and is left to the reader, that  is a linear mapping.
is a linear mapping.
The direct sum of vector spaces can be defined similarly to the direct sum of rings. The direct sum of the vector spaces  and
and  is denoted by
is denoted by  . The underlying set of the direct sum is
. The underlying set of the direct sum is  , and the addition and the action of the field
, and the addition and the action of the field  are defined componentwise. It is easy to see that
are defined componentwise. It is easy to see that

Let  be a field and let
be a field and let  be a finite multiplicative subgroup of
be a finite multiplicative subgroup of  . That is, the set
. That is, the set  contains finitely many elements of
contains finitely many elements of  , each of which is non-zero,
, each of which is non-zero,  is closed under multiplication, and the multiplicative inverse of an element of
is closed under multiplication, and the multiplicative inverse of an element of  also lies in
also lies in  . We aim to show that the group
. We aim to show that the group  is cyclic, that is,
is cyclic, that is,  can be generated by a single element. The main concepts related to cyclic groups can be found in Section 33.3.4.
can be generated by a single element. The main concepts related to cyclic groups can be found in Section 33.3.4.  of an element
of an element  is the smallest positive integer
is the smallest positive integer  such that
such that  .
.
The cyclic group generated by an element  is denoted by
is denoted by  . Clearly,
. Clearly,  , and an element
, and an element  generates the group
generates the group  if and only if
if and only if  and
and  are relatively prime. Hence the group
are relatively prime. Hence the group  has exactly
has exactly  generators where
generators where  is Euler's totient function (see Subsection 33.3.2).
is Euler's totient function (see Subsection 33.3.2).
The following identity is valid for an arbitrary integer  :
:

Here the summation index  runs through all positive divisors of
runs through all positive divisors of  . In order to verify this identity, consider all the rational numbers
. In order to verify this identity, consider all the rational numbers  with
with  . The number of these is exactly
. The number of these is exactly  . After simplifying these fractions, they will be of the form
. After simplifying these fractions, they will be of the form  where
where  is a positive divisor of
is a positive divisor of  . A fixed denominator
. A fixed denominator  will occur exactly
will occur exactly  times.
times.
Theorem 5.2 Suppose that  is a field and let
is a field and let  be a finite multiplicative subgroup of
be a finite multiplicative subgroup of  . Then there exists an element
. Then there exists an element  such that
such that  .
.
Proof. Suppose that  . Lagrange's theorem (Theorem 33.15) implies that the order of an element
. Lagrange's theorem (Theorem 33.15) implies that the order of an element  is a divisor of
is a divisor of  . We claim, for an arbitrary
. We claim, for an arbitrary  , that there are at most
, that there are at most  elements in
elements in  with order
with order  . The elements with order
. The elements with order  are roots of the polynomial
are roots of the polynomial  . If
. If  has an element
has an element  with order
with order  , then, by Lemma 5.5,
, then, by Lemma 5.5,  (the lemma will be verified later). Therefore all the elements of
(the lemma will be verified later). Therefore all the elements of  with order
with order  are contained in the group
are contained in the group  , which, in turn, contains exactly
, which, in turn, contains exactly  elements of order
elements of order  .
.
If  had no element of order
had no element of order  , then the order of each of the elements of
, then the order of each of the elements of  would be a proper divisor of
would be a proper divisor of  . In this case, however, using the identity above and the fact that
. In this case, however, using the identity above and the fact that  , we obtain
, we obtain

which is a contradiction.
Suppose that  is a field and that
is a field and that  are elements of
are elements of  . Recall that an expression of the form
. Recall that an expression of the form

where  is an indeterminate, is said to be a polynomial over
is an indeterminate, is said to be a polynomial over  (see Chapter 32). The scalars
(see Chapter 32). The scalars  are the coefficients of the polynomial
are the coefficients of the polynomial  . The degree of the zero polynomial is zero, while the degree of a non-zero polynomial
. The degree of the zero polynomial is zero, while the degree of a non-zero polynomial  is the largest index
is the largest index  such that
such that  . The degree of
. The degree of  is denoted by
is denoted by  .
.
The set of all polynomials over  in the indeterminate
in the indeterminate  is denoted by
is denoted by  . If
. If

and

are polynomials with degree not larger than  , then their sum is defined as the polynomial
, then their sum is defined as the polynomial

whose coefficients are  .
.
The product  of the polynomials
of the polynomials  and
and  is defined as the polynomial
is defined as the polynomial

with degree at most  whose coefficients are given by the equations
whose coefficients are given by the equations  . On the right-hand side of these equations, the coefficients with index greater than
. On the right-hand side of these equations, the coefficients with index greater than  are considered zero. Easy computation shows that
are considered zero. Easy computation shows that  is a commutative ring with respect to these operations. It is also straightforward to show that
is a commutative ring with respect to these operations. It is also straightforward to show that  has no zero divisors, that is, whenever
has no zero divisors, that is, whenever  , then either
, then either  or
or  .
.
The ring  of polynomials over
of polynomials over  is quite similar, in many ways, to the ring
is quite similar, in many ways, to the ring  of integers. One of their similar features is that the procedure of division with remainder can be performed in both rings.
of integers. One of their similar features is that the procedure of division with remainder can be performed in both rings.
Lemma 5.3 Let  be polynomials such that
be polynomials such that  . Then there there exist polynomials
. Then there there exist polynomials  and
and  such that
such that

and either  or
or  . Moreover, the polynomials
. Moreover, the polynomials  and
and  are uniquely determined by these conditions.
are uniquely determined by these conditions.
Proof. We verify the claim about the existence of the polynomials  and
and  by induction on the degree of
by induction on the degree of  . If
. If  or
or  , then the assertion clearly holds. Let us suppose, therefore, that
, then the assertion clearly holds. Let us suppose, therefore, that  . Then subtracting a suitable multiple
. Then subtracting a suitable multiple  of
of  from
from  , we obtain that the degree of
, we obtain that the degree of  is smaller than
is smaller than  . Then, by the induction hypothesis, there exist polynomials
. Then, by the induction hypothesis, there exist polynomials  and
and  such that
such that

and either  or
or  . It is easy to see that, in this case, the polynomials
. It is easy to see that, in this case, the polynomials  and
and  are as required.
are as required.
It remains to show that the polynomials  and
and  are unique. Let
are unique. Let  and
and  be polynomials, possibly different from
be polynomials, possibly different from  and
and  , satisfying the assertions of the lemma. That is,
, satisfying the assertions of the lemma. That is,  , and so
, and so  . If the polynomial on the left-hand side is non-zero, then its degree is at least
. If the polynomial on the left-hand side is non-zero, then its degree is at least  , while the degree of the polynomial on the right-hand side is smaller than
, while the degree of the polynomial on the right-hand side is smaller than  . This, however, is not possible.
. This, however, is not possible.
Let  be a commutative ring with a multiplicative identity and without zero divisors, and set
be a commutative ring with a multiplicative identity and without zero divisors, and set  . The ring
. The ring  is said to be a Euclidean ring if there is a function
is said to be a Euclidean ring if there is a function  such that
such that  , for all
, for all  ; and, further, if
; and, further, if  ,
,  , then there are elements
, then there are elements  such that
such that  , and if
, and if  , then
, then  . The previous lemma shows that
. The previous lemma shows that  is a Euclidean ring where the role of the function
is a Euclidean ring where the role of the function  is played by the degree function.
is played by the degree function.
The concept of divisibility in  can be defined similarly to the definition of the corresponding concept in the ring of integers. A polynomial
can be defined similarly to the definition of the corresponding concept in the ring of integers. A polynomial  is said to be a divisor of a polynomial
is said to be a divisor of a polynomial  (the notation is
(the notation is  ), if there is a polynomial
), if there is a polynomial  such that
such that  . The non-zero elements of
. The non-zero elements of  , which are clearly divisors of each of the polynomials, are called the trivial divisors or units. A non-zero polynomial
, which are clearly divisors of each of the polynomials, are called the trivial divisors or units. A non-zero polynomial  is said to be irreducible, if whenever
is said to be irreducible, if whenever  with
with  , then either
, then either  or
or  is a unit.
is a unit.
Two polynomials  are called associates, if there is some
are called associates, if there is some  such that
such that  .
.
Using Lemma 5.3, one can easily prove the unique factorisation theorem in the ring of polynomials following the argument of the proof of the corresponding theorem in the ring of integers (see Section 33.1). The role of the absolute value of integers is played by the degree of polynomials.
Theorem 5.4 An arbitrary polynomial  can be written in the form
can be written in the form

where  is a unit, the polynomials
is a unit, the polynomials  are pairwise non-associate and irreducible, and, further, the numbers
are pairwise non-associate and irreducible, and, further, the numbers  are positive integers. Furthermore, this decomposition is essentially unique in the sense that whenever
are positive integers. Furthermore, this decomposition is essentially unique in the sense that whenever

is another such decomposition, then  , and, after possibly reordering the factors
, and, after possibly reordering the factors  , the polynomials
, the polynomials  and
and  are associates, and moreover
are associates, and moreover  for all
for all  .
.
Two polynomials are said to be relatively prime, if they have no common irreducible divisors.
A scalar  is a root of a polynomial
is a root of a polynomial  , if
, if  . Here the value
. Here the value  is obtained by substituting
is obtained by substituting  into the place of
into the place of  in
in  .
.
Lemma 5.5 Suppose that  is a root of a polynomial
is a root of a polynomial  . Then there exists a polynomial
. Then there exists a polynomial  such that
such that  . Hence the polynomial
. Hence the polynomial  may have at most
may have at most  roots.
roots.
Proof. By Lemma 5.3, there exists  and
and  such that
such that  . Substituting
. Substituting  for
for  , we find that
, we find that  . The second assertion now follows by induction on
. The second assertion now follows by induction on  from the fact that the roots of
from the fact that the roots of  are also roots of
are also roots of  .
.
Suppose that  are polynomials of degree at most
are polynomials of degree at most  . Then the polynomials
. Then the polynomials  can obviously be computed using
can obviously be computed using  field operations. The product
field operations. The product  can be obtained, using its definition, by
can be obtained, using its definition, by  field operations. If the Fast Fourier Transform can be performed over
field operations. If the Fast Fourier Transform can be performed over  , then the multiplication can be computed using only
, then the multiplication can be computed using only  field operations (see Theorem 32.2). For general fields, the cost of
the fastest known multiplication algorithms for polynomials (for
instance the Schönhage–Strassen-method) is
field operations (see Theorem 32.2). For general fields, the cost of
the fastest known multiplication algorithms for polynomials (for
instance the Schönhage–Strassen-method) is  , that is,
, that is,  field operations.
field operations.
The division with remainder, that is, determining the polynomials  and
and  for which
for which  and either
and either  or
or  , can be performed using
, can be performed using  field operations following the straightforward method outlined in the proof of Lemma 5.3. There is, however, an algorithm (the Sieveking–Kung algorithm) for the same problem using only
field operations following the straightforward method outlined in the proof of Lemma 5.3. There is, however, an algorithm (the Sieveking–Kung algorithm) for the same problem using only  steps. The details of this algorithm are, however, not discussed here.
steps. The details of this algorithm are, however, not discussed here.
Let  with
with  , and let
, and let  . We say that
. We say that  is congruent to
is congruent to  modulo
modulo  , or simply
, or simply  , if
, if  divides the polynomial
divides the polynomial  .
This concept of congruence is similar to the corresponding concept
introduced in the ring of integers (see 33.3.2). It is easy to see from
the definition that the relation
.
This concept of congruence is similar to the corresponding concept
introduced in the ring of integers (see 33.3.2). It is easy to see from
the definition that the relation  is an equivalence relation on the set
is an equivalence relation on the set  . Let
. Let  (or simply
(or simply  if
if  is clear from the context) denote the equivalence class containing
is clear from the context) denote the equivalence class containing  . From Lemma 5.3 we obtain immediately, for each
. From Lemma 5.3 we obtain immediately, for each  , that there is a unique
, that there is a unique  such that
such that  , and either
, and either  (if
(if  divides
divides  ) or
) or  . This polynomial
. This polynomial  is called the representative of the class
is called the representative of the class  . The set of equivalence classes is traditionally denoted by
. The set of equivalence classes is traditionally denoted by  .
.
Lemma 5.6 Let  and let
and let  . Suppose that
. Suppose that  and
and  . Then
. Then


and

Proof. The first congruence is valid, as

and the right-hand side of this is clearly divisible by  . The second and the third congruences follow similarly from the identities
. The second and the third congruences follow similarly from the identities

and

respectively.
The previous lemma makes it possible to define the sum and the product of two congruence classes  and
and  as
as  and
and  ,
respectively. The lemma claims that the sum and the product are
independent of the choice of the congruence class representatives. The
same way, we may define the action of
,
respectively. The lemma claims that the sum and the product are
independent of the choice of the congruence class representatives. The
same way, we may define the action of  on the set of congruence classes: we set
on the set of congruence classes: we set  .
.
Theorem 5.7 Suppose that  and that
and that  .
.
(i) The set of residue classes  is a commutative ring with an identity under the operations
is a commutative ring with an identity under the operations  and
and  defined above.
defined above.
(ii) The ring  contains the field
contains the field  as a subring, and it is an
as a subring, and it is an  -dimensional vector space over
-dimensional vector space over  . Further, the residue classes
. Further, the residue classes  form a basis of
form a basis of  .
.
(iii) If  is an irreducible polynomial in
is an irreducible polynomial in  , then
, then  is a field.
is a field.
Proof. (i) The fact that  is a ring follows easily from the fact that
is a ring follows easily from the fact that  is a ring. Let us, for instance, verify the distributive property:
is a ring. Let us, for instance, verify the distributive property:

The zero element of  is the class
is the class  , the additive inverse of the class
, the additive inverse of the class  is the class
is the class  , while the multiplicative identity element is the class
, while the multiplicative identity element is the class  . The details are left to the reader.
. The details are left to the reader.
(ii) The set  is a subring isomorphic to
is a subring isomorphic to  . The correspondence is obvious:
. The correspondence is obvious:  . By part (i),
. By part (i),  is an additive Abelian group, and the action of
is an additive Abelian group, and the action of  satisfies the vector space axioms. This follows from the fact that the polynomial ring is itself a vector space over
satisfies the vector space axioms. This follows from the fact that the polynomial ring is itself a vector space over  . Let us, for example, verify the distributive property:
. Let us, for example, verify the distributive property:

The other properties are left to the reader.
We claim that the classes  are linearly independent. For, if
are linearly independent. For, if

then  , as the zero polynomial is the unique polynomial with degree less than
, as the zero polynomial is the unique polynomial with degree less than  that is divisible by
that is divisible by  . On the other hand, for a polynomial
. On the other hand, for a polynomial  , the degree of the class representative of
, the degree of the class representative of  is less than
is less than  . Thus the class
. Thus the class  can be expressed as a linear combination of the classes
can be expressed as a linear combination of the classes  . Hence the classes
. Hence the classes  form a basis of
form a basis of  , and so
, and so  .
.
(iii) Suppose that  is irreducible. First we show that
is irreducible. First we show that  has no zero divisors. If
has no zero divisors. If  , then
, then  divides
divides  , and so
, and so  divides either
divides either  or
or  . That is, either
. That is, either  or
or  . Suppose now that
. Suppose now that  with
with  . We claim that the classes
. We claim that the classes  are linearly independent. Indeed, an equation
are linearly independent. Indeed, an equation  implies
implies  , and, in turn, it also yields that
, and, in turn, it also yields that  . Therefore the classes
. Therefore the classes  form a basis of
form a basis of  . Hence there exist coefficients
. Hence there exist coefficients  for which
for which

Thus we find that the class  has a multiplicative inverse, and so
has a multiplicative inverse, and so  is a field, as required.
is a field, as required.
We note that the converse of part (iii) of the previous theorem is also true, and its proof is left to the reader (Exercise 5.1-1).
Example 5.2 We usually represent the elements of the residue class ring  by their representatives, which are polynomials with degree less than
by their representatives, which are polynomials with degree less than  .
.
1. Suppose that  is the field of two elements, and let
is the field of two elements, and let  . Then the ring
. Then the ring  has 8 elements, namely
has 8 elements, namely

Practically speaking, the addition between the classes is the is addition of polynomials. For instance

When
computing the product, we compute the product of the representatives,
and substitute it (or reduce it) with its remainder after dividing by  . For instance,
. For instance,

The polynomial  is irreducible over
is irreducible over  , since it has degree 3, and has no roots. Hence the residue class ring
, since it has degree 3, and has no roots. Hence the residue class ring  is a field.
is a field.
2. Let  and let
and let  . The elements of the residue class ring are the classes of the form
. The elements of the residue class ring are the classes of the form  where
where  . The ring
. The ring  is not a field, since
is not a field, since  is not irreducible. For instance,
is not irreducible. For instance,  .
.
Lemma 5.8 Let  be a field containing a field
be a field containing a field  and let
and let  .
.
(i) If  is finite-dimensional as a vector space over
is finite-dimensional as a vector space over  , then there is a non-zero polynomial
, then there is a non-zero polynomial  such that
such that  is a root of
is a root of  .
.
(ii) Assume that there is a polynomial  with
with  , and let
, and let  be such a polynomial with minimal degree. Then the polynomial
be such a polynomial with minimal degree. Then the polynomial  is irreducible in
is irreducible in  . Further, if
. Further, if  with
with  then
then  is a divisor of
is a divisor of  .
.
Proof. (i) For a sufficiently large  , the elements
, the elements  are linearly dependent over
are linearly dependent over  . A linear dependence gives a polynomial
. A linear dependence gives a polynomial  such that
such that  .
.
(ii) If  , then, as
, then, as  , the element
, the element  is a root of either
is a root of either  or
or  . As
. As  was chosen to have minimal degree, one of the polynomials
was chosen to have minimal degree, one of the polynomials  is a unit, and so
is a unit, and so  is irreducible. Finally, let
is irreducible. Finally, let  such that
such that  . Let
. Let  be the polynomials as in Lemma 5.3 for which
be the polynomials as in Lemma 5.3 for which  . Substituting
. Substituting  for
for  into the last equation, we obtain
into the last equation, we obtain  , which is only possible if
, which is only possible if  .
.
Definition 5.9 The polynomial  in the last lemma is said to be a minimal polynomial of
in the last lemma is said to be a minimal polynomial of  .
.
It follows from the previous lemma that the minimal polynomial is
unique up to a scalar multiple. It will often be helpful to assume that
the leading coefficient (the coefficient of the term with the highest
degree) of the minimal polynomial  is 1.
is 1.
Corollary 5.10 Let  be a field containing
be a field containing  , and let
, and let  . Suppose that
. Suppose that  is irreducible and that
is irreducible and that  . Then
. Then  is a minimal polynomial of
is a minimal polynomial of  .
.
Proof. Suppose that  is a minimal polynomial of
is a minimal polynomial of  . By the previous lemma,
. By the previous lemma,  and
and  is irreducible. This is only possible if the polynomials
is irreducible. This is only possible if the polynomials  and
and  are associates.
are associates.
Let  be a field containing
be a field containing  and let
and let  . Let
. Let  denote the smallest subfield of
denote the smallest subfield of  that contains
that contains  and
and  .
.
Theorem 5.11 Let  be a field containing
be a field containing  and let
and let  . Suppose that
. Suppose that  is a minimal polynomial of
is a minimal polynomial of  . Then the field
. Then the field  is isomorphic to the field
is isomorphic to the field  . More precisely, there exists an isomorphism
. More precisely, there exists an isomorphism  such that
such that  , for all
, for all  , and
, and  . The map
. The map  is also an isomorphism of vector spaces over
is also an isomorphism of vector spaces over  , and so
, and so  .
.
Proof. Let us consider the map  , which maps a polynomial
, which maps a polynomial  into
into  . This is clearly a ring homomorphism, and
. This is clearly a ring homomorphism, and  . We claim that
. We claim that  if and only if
if and only if  . Indeed,
. Indeed,  holds if and only if
holds if and only if  , that is, if
, that is, if  , which, by Lemma 5.8, is equivalent to
, which, by Lemma 5.8, is equivalent to  , and this amounts to saying that
, and this amounts to saying that  . Suppose that
. Suppose that  is the map
is the map  induced by
induced by  , that is,
, that is,  . By the argument above, the map
. By the argument above, the map  is one-to-one. Routine computation shows that
is one-to-one. Routine computation shows that  is a ring, and also a vector space, homomorphism. As
is a ring, and also a vector space, homomorphism. As  is a field, its homomorphic image
is a field, its homomorphic image  is also a field. The field
is also a field. The field  contains
contains  and
and  , and so necessarily
, and so necessarily  .
.
Let  be polynomials such that
be polynomials such that  . Set
. Set  ,
,  and define the polynomials
and define the polynomials  and
and  using division with reminder as follows:
using division with reminder as follows:





Note that if  then
then  is smaller than
is smaller than  . We form this sequence of polynomials until we obtain that
. We form this sequence of polynomials until we obtain that  . By Lemma 5.3, this defines a finite process. Let
. By Lemma 5.3, this defines a finite process. Let  be the maximum of
be the maximum of  and
and  . As, in each step, we decrease the degree of the polynomials, we have
. As, in each step, we decrease the degree of the polynomials, we have  . The computation outlined above is usually referred to as the Euclidean algorithm. A version of this algorithm for the ring of integers is described in Section 33.2.
. The computation outlined above is usually referred to as the Euclidean algorithm. A version of this algorithm for the ring of integers is described in Section 33.2.
We say that the polynomial  is the greatest common divisor of the polynomials
is the greatest common divisor of the polynomials  and
and  , if
, if  ,
,  , and, if a polynomial
, and, if a polynomial  is a divisor of
is a divisor of  and
and  , then
, then  is a divisor of
is a divisor of  . The usual notation for the greatest common divisor of
. The usual notation for the greatest common divisor of  and
and  is
is  . It follows from Theorem 5.4 that
. It follows from Theorem 5.4 that  exists and it is unique up to a scalar multiple.
exists and it is unique up to a scalar multiple.
Theorem 5.12 Suppose that  are polynomials, that
are polynomials, that  , and let
, and let  be the maximum of
be the maximum of  and
and  . Assume, further, that the number
. Assume, further, that the number  and the polynomial
and the polynomial  are defined by the procedure above. Then
are defined by the procedure above. Then
(i)  .
.
(ii) There are polynomials  with degree at most
with degree at most  such that
such that

(iii) With a given input  , the polynomials
, the polynomials  can be computed using
can be computed using  field operations in
field operations in  .
.
Proof. (i) Going backwards in the Euclidean algorithm, it is easy to see that the polynomial  divides each of the
divides each of the  , and so it divides both
, and so it divides both  and
and  . The same way, if a polynomial
. The same way, if a polynomial  divides
divides  and
and  , then it divides
, then it divides  , for all
, for all  , and, in particular, it divides
, and, in particular, it divides  . Thus
. Thus  .
.
(ii) The claim is obvious if  , and so we may assume without loss of generality that
, and so we may assume without loss of generality that  . Starting at the beginning of the Euclidean sequence, it is easy to see that there are polynomials
. Starting at the beginning of the Euclidean sequence, it is easy to see that there are polynomials  such that
such that

We observe that (5.2) also holds if we substitute  by its remainder
by its remainder  after dividing by
after dividing by  and substitute
and substitute  by its remainder
by its remainder  after dividing by
after dividing by  . In order to see this, we compute
. In order to see this, we compute

and notice that the degree of the polynomials on both sides of this congruence is smaller than  . This gives
. This gives

(iii) Once we determined the polynomials  ,
,  ,
,  and
and  , the polynomials
, the polynomials  ,
,  and
and  can be obtained using
can be obtained using  field operations in
field operations in  . Initially we have
. Initially we have  and
and  . As
. As  , the claim follows.
, the claim follows.
Remark. Traditionally, the
Euclidean algorithm is only used to compute the greatest common
divisor. The version that also computes the polynomials  and
and  in (5.1)
is usually called the extended Euclidean algorithm. In Chapter 6 the
reader can find a discussion of the Euclidean algorithm for
polynomials. It is relatively easy to see that the polynomials
in (5.1)
is usually called the extended Euclidean algorithm. In Chapter 6 the
reader can find a discussion of the Euclidean algorithm for
polynomials. It is relatively easy to see that the polynomials  ,
,  , and
, and  in (5.1) can, in fact, be computed using
in (5.1) can, in fact, be computed using  field operations. The cost of the asymptotically best method is
field operations. The cost of the asymptotically best method is  .
.
The derivative of a polynomial is often useful when investigating multiple factors. The derivative of the polynomial

is the polynomial

It follows immediately from the definition that the map  is an
is an  -linear mapping
-linear mapping  . Further, for
. Further, for  and
and  , the equations
, the equations  and
and  hold. The derivative of a product can be computed using the Leibniz rule: for all
hold. The derivative of a product can be computed using the Leibniz rule: for all  we have
we have  .
As the derivation is a linear map, in order to show that the Leibniz
rule is valid, it is enough to verify it for polynomials of the form
.
As the derivation is a linear map, in order to show that the Leibniz
rule is valid, it is enough to verify it for polynomials of the form  and
and  . It is easy to see that, for such polynomials, the Leibniz rule is valid.
. It is easy to see that, for such polynomials, the Leibniz rule is valid.
The derivative  is sensitive to multiple factors in the irreducible factorisation of
is sensitive to multiple factors in the irreducible factorisation of  .
.
Lemma 5.13 Let  be an arbitrary field, and assume that
be an arbitrary field, and assume that  and
and  where
where  . Then
. Then  divides the derivative
divides the derivative  of the polynomial
of the polynomial  .
.
Proof. Using induction on  and the Leibniz rule, we find
and the Leibniz rule, we find  . Thus, applying the Leibniz rule again,
. Thus, applying the Leibniz rule again,  . Hence
. Hence  .
.
In many cases the converse of the last lemma also holds.
Lemma 5.14 Let  be an arbitrary field, and assume that
be an arbitrary field, and assume that  and
and  where the polynomials
where the polynomials  and
and  are relatively prime. Suppose further that
are relatively prime. Suppose further that  (for instance
(for instance  has characteristic
has characteristic  and
and  is non-constant). Then the derivative
is non-constant). Then the derivative  is not divisible by
is not divisible by  .
.
Proof. By the Leibniz rule,  . Since
. Since  is smaller than
is smaller than  , we obtain that
, we obtain that  is not divisible by
is not divisible by  , and neither is the product
, and neither is the product  , as
, as  and
and  are relatively prime.
are relatively prime.
Using the following theorem, the ring  can be assembled from rings of the form
can be assembled from rings of the form  where
where  .
.
Theorem 5.15 (Chinese remainder theorem for polynomials)Let  pairwise relatively prime polynomials with positive degree and set
pairwise relatively prime polynomials with positive degree and set  . Then the rings
. Then the rings  and
and  are isomorphic. The mapping realizing the isomorphism is
are isomorphic. The mapping realizing the isomorphism is

Proof. First we note that the map  is well-defined. If
is well-defined. If  , then
, then  , which implies that
, which implies that  and
and  give the same remainder after division by the polynomial
give the same remainder after division by the polynomial  , that is,
, that is,  .
.
The mapping  is clearly a ring homomorphism, and it is also a linear mapping between two vector spaces over
is clearly a ring homomorphism, and it is also a linear mapping between two vector spaces over  . The mapping
. The mapping  is one-to-one; for, if
is one-to-one; for, if  , then
, then  , that is,
, that is,  (
( ), which gives
), which gives  and
and  .
.
The dimensions of the vector spaces  and
and  coincide: indeed, both spaces have dimension
coincide: indeed, both spaces have dimension  . Lemma 5.1 implies that
. Lemma 5.1 implies that  is an isomorphism between vector spaces. It only remains to show that
is an isomorphism between vector spaces. It only remains to show that  preserves the multiplication; this, however, is left to the reader.
preserves the multiplication; this, however, is left to the reader.
Exercises
5.1-1 Let  be polynomial. Show that the residue class ring
be polynomial. Show that the residue class ring  has no zero divisors if and only if
has no zero divisors if and only if  is irreducible.
is irreducible.
5.1-2 Let  be a commutative ring with an identity. A subset
be a commutative ring with an identity. A subset  is said to be an ideal, if
is said to be an ideal, if  is an additive subgroup, and
is an additive subgroup, and  ,
,  imply
imply  . Show that
. Show that  is a field if and only if its ideals are exactly
is a field if and only if its ideals are exactly  and
and  .
.
5.1-3 Let  . Let
. Let  denote the smallest ideal in
denote the smallest ideal in  that contains the elements
that contains the elements  . Show that
. Show that  always exists, and it consists of the elements of the form
always exists, and it consists of the elements of the form  where
where  .
.
5.1-4 A commutative ring  with an identity and without zero divisors is said to be a principal ideal domain if, for each ideal
with an identity and without zero divisors is said to be a principal ideal domain if, for each ideal  of
of  , there is an element
, there is an element  such that (using the notation of the previous exercise)
such that (using the notation of the previous exercise)  . Show that
. Show that  and
and  where
where  is a field, are principal ideal domains.
is a field, are principal ideal domains.
5.1-5 Suppose that  is a commutative ring with an identity, that
is a commutative ring with an identity, that  an ideal in
an ideal in  , and that
, and that  . Define a relation on
. Define a relation on  as follows:
as follows:  if and only if
if and only if  . Verify the following:
. Verify the following:
a.) The relation  is an equivalence relation on
is an equivalence relation on  .
.
b.) Let  denote the equivalence class containing an element
denote the equivalence class containing an element  , and let
, and let  denote the set of equivalence classes. Set
denote the set of equivalence classes. Set  , and
, and  . Show that, with respect to these operations,
. Show that, with respect to these operations,  is a commutative ring with an identity.
is a commutative ring with an identity.
Hint. Follow the argument in the proof of Theorem 5.7.
5.1-6 Let  be a field and let
be a field and let  such that
such that  . Show that there exists a polynomial
. Show that there exists a polynomial  such that
such that  .
.
Hint. Use the Euclidean algorithm.
Finite fields, that is, fields with a finite number of elements, play an important role in mathematics and in several of its application areas, for instance, in computing. They are also fundamental in many important constructions. In this section we summarise the most important results in the theory of finite fields, putting an emphasis on the problem of their construction.
In this section  denotes a prime number, and
denotes a prime number, and  denotes a power of
denotes a power of  with a positive integer exponent.
with a positive integer exponent.
Theorem 5.16 Suppose that  is a finite field. Then there is a prime number
is a finite field. Then there is a prime number  such that the prime field of
such that the prime field of  is isomorphic to
is isomorphic to  (the field of residue classes modulo
(the field of residue classes modulo  ). Further, the field
). Further, the field  is a finite dimensional vector space over
is a finite dimensional vector space over  , and the number of its elements is a power of
, and the number of its elements is a power of  . In fact, if
. In fact, if  , then
, then  .
.
Proof. The characteristic of  must be a prime, say
must be a prime, say  , as a field with characteristic zero must have infinitely many elements. Thus the prime field
, as a field with characteristic zero must have infinitely many elements. Thus the prime field  of
of  is isomorphic to
is isomorphic to  . Since
. Since  is a subfield, the field
is a subfield, the field  is a vector space over
is a vector space over  . Let
. Let  be a basis of
be a basis of  over
over  . Then each
. Then each  can be written uniquely in the form
can be written uniquely in the form  where
where  . Hence
. Hence  .
.
In a field  , the set of non-zero elements (the multiplicative group of
, the set of non-zero elements (the multiplicative group of  ) is denoted by
) is denoted by  . From Theorem 5.2 we immediately obtain the following result.
. From Theorem 5.2 we immediately obtain the following result.
Theorem 5.17 If  is a finite field, then its multiplicative group
is a finite field, then its multiplicative group  is cyclic.
is cyclic.
A generator of the group  is said to be a primitive element. If
is said to be a primitive element. If  and
and  is a primitive element of
is a primitive element of  , then the elements of
, then the elements of  are
are  .
.
Corollary 5.18 Suppose that  is a finite field with order
is a finite field with order  and let
and let  be a primitive element of
be a primitive element of  . Let
. Let  be a minimal polynomial of
be a minimal polynomial of  over
over  . Then
. Then  is irreducible in
is irreducible in  , the degree of
, the degree of  is
is  , and
, and  is isomorphic to the field
is isomorphic to the field  .
.
Proof. Since the element  is primitive in
is primitive in  , we have
, we have  . The rest of the lemma follows from Lemma 5.8 and from Theorem 5.11.
. The rest of the lemma follows from Lemma 5.8 and from Theorem 5.11.
Theorem 5.19 Let  be a finite field with order
be a finite field with order  . Then
. Then
(i) (Fermat's little theorem) If  , then
, then  .
.
(ii) If  , then
, then  .
.
Proof. (i) Suppose that  is a primitive element. Then we may choose an integer
is a primitive element. Then we may choose an integer  such that
such that  . Therefore
. Therefore

(ii) Clearly, if  then this claim is true, while, for
then this claim is true, while, for  , the claim follows from part (i).
, the claim follows from part (i).
Theorem 5.20 Let  be a field with
be a field with  elements. Then
elements. Then
Proof. By Theorem 5.19 and Lemma 5.5, the product on the right-hand side is a divisor of the polynomial  . Now the assertion follows, as the degrees and the leading coefficients of the two polynomials in the equation coincide.
. Now the assertion follows, as the degrees and the leading coefficients of the two polynomials in the equation coincide.
Corollary 5.21 Arbitrary two finite fields with the same number of elements are isomorphic.
Proof. Suppose that  , and that both
, and that both  and
and  are fields with
are fields with  elements. Let
elements. Let  be a primitive element in
be a primitive element in  . Then Corollary 5.18 implies that a minimal polynomial
. Then Corollary 5.18 implies that a minimal polynomial  of
of  over
over  is irreducible (in
is irreducible (in  ) with degree
) with degree  . Further,
. Further,  . By Lemma 5.8 and Theorem 5.19, the minimal polynomial
. By Lemma 5.8 and Theorem 5.19, the minimal polynomial  is a divisor of the polynomial
is a divisor of the polynomial  . Applying Theorem 5.20 to
. Applying Theorem 5.20 to  , we find that the polynomial
, we find that the polynomial  , and also its divisor
, and also its divisor  , can be factored as a product of linear terms in
, can be factored as a product of linear terms in  , and so
, and so  has at least one root
has at least one root  in
in  . As
. As  is irreducible in
is irreducible in  , it must be a minimal polynomial of
, it must be a minimal polynomial of  (see Corollary 5.10), and so
(see Corollary 5.10), and so  is isomorphic to the field
is isomorphic to the field  . Comparing the number of elements in
. Comparing the number of elements in  and in
and in  , we find that
, we find that  , and further, that
, and further, that  and
and  are isomorphic.
are isomorphic.
In the sequel, we let  denote the field with
denote the field with  elements, provided it exists. In order to prove the existence of such a field for each prime-power
elements, provided it exists. In order to prove the existence of such a field for each prime-power  , the following two facts will be useful.
, the following two facts will be useful.
Lemma 5.22 If  is a prime number and
is a prime number and  is an integer such that
is an integer such that  , then
, then  .
.
Proof. On the one hand, the number  is an integer. On the other hand,
is an integer. On the other hand,  is a fraction such that, for
is a fraction such that, for  , its numerator is divisible by
, its numerator is divisible by  , but its denominator is not.
, but its denominator is not.
Lemma 5.23 Let  be a commutative ring and let
be a commutative ring and let  be a prime such that
be a prime such that  for all
for all  . Then the map
. Then the map  mapping
mapping  is a ring homomorphism.
is a ring homomorphism.
Proof. Suppose that  . Clearly,
. Clearly,

By the previous lemma,

We obtain in the same way that  .
.
The homomorphism  in the previous lemma is called the Frobenius endomorphism.
in the previous lemma is called the Frobenius endomorphism.
Theorem 5.24 Assume that the polynomial  is irreducible, and, for a positive integer
is irreducible, and, for a positive integer  , it is a divisor of the polynomial
, it is a divisor of the polynomial  . Then the degree of
. Then the degree of  divides
divides  .
.
Proof. Let  be the degree of
be the degree of  , and suppose, by contradiction, that
, and suppose, by contradiction, that  where
where  . The assumption that
. The assumption that  can be rephrased as
can be rephrased as  . However, this means that, for an arbitrary polynomial
. However, this means that, for an arbitrary polynomial  , we have
, we have

Note that we applied Lemma 5.23 to the ring  , and Theorem 5.19 to
, and Theorem 5.19 to  . The residue class ring
. The residue class ring  is isomorphic to the field
is isomorphic to the field  , which has
, which has  elements. Let
elements. Let  be a polynomial for which
be a polynomial for which  is a primitive element in the field
is a primitive element in the field  . That is,
. That is,  , but
, but  for
for  . Therefore,
. Therefore,

and so  . Since the residue class ring
. Since the residue class ring  is a field,
is a field,  , but we must have
, but we must have  . As
. As  , this contradicts to the primitivity of
, this contradicts to the primitivity of  .
.
Theorem 5.25 For an arbitrary prime  and positive integer
and positive integer  , there exists a field with
, there exists a field with  elements.
elements.
Proof. We use induction on  . The claim clearly holds if
. The claim clearly holds if  . Now let
. Now let  and let
and let  be a prime divisor of
be a prime divisor of  . By the induction hypothesis, there is a field with
. By the induction hypothesis, there is a field with  elements. By Theorem 5.24, each of the irreducible factors, in
elements. By Theorem 5.24, each of the irreducible factors, in  , of the the polynomial
, of the the polynomial  has degree either 1 or
has degree either 1 or  . Further,
. Further,  , and so, by Lemma 5.13,
, and so, by Lemma 5.13,  is square-free. Over
is square-free. Over  , the number of linear factors of
, the number of linear factors of  is at most
is at most  , and so is the degree of their product. Hence there exist at least
, and so is the degree of their product. Hence there exist at least  polynomials with degree
polynomials with degree  that are irreducible in
that are irreducible in  . Let
. Let  be such a polynomial. Then the field
be such a polynomial. Then the field  is isomorphic to the field with
is isomorphic to the field with  elements.
elements.
Corollary 5.26 For each positive integer  , there is an irreducible polynomial
, there is an irreducible polynomial  with degree
with degree  .
.
Proof. Take a minimal polynomial over  of a primitive element in
of a primitive element in  .
.
A little bit later, in Theorem 5.31, we will prove a stronger statement: a random polynomial in  with degree
with degree  is irreducible with high probability.
is irreducible with high probability.
Subfields of finite fields.
The following theorem describes all subfields of a finite field.
Theorem 5.27 The field  contains a subfield isomorphic to
contains a subfield isomorphic to  , if and only if
, if and only if  . In this case, there is exactly one subfield in
. In this case, there is exactly one subfield in  that is isomorphic to
that is isomorphic to  .
.
Proof. The condition that  is necessary, since the larger field is a vector space over the smaller field, and so
is necessary, since the larger field is a vector space over the smaller field, and so  must hold with a suitable integer
must hold with a suitable integer  .
.
Conversely, suppose that  , and let
, and let  be an irreducible polynomial with degree
be an irreducible polynomial with degree  . Such a polynomial exists by Corollary 5.26. Let
. Such a polynomial exists by Corollary 5.26. Let  . Applying Theorem 5.19, we obtain, in
. Applying Theorem 5.19, we obtain, in  , that
, that  , which yields
, which yields  . Thus
. Thus  must be a divisor of the polynomial
must be a divisor of the polynomial  . Using Theorem 5.20, we find that
. Using Theorem 5.20, we find that  has a root
has a root  in
in  . Now we may prove in the usual way that the subfield
. Now we may prove in the usual way that the subfield  is isomorphic to
is isomorphic to  .
.
The last assertion is valid, as the elements of  are exactly the roots of
are exactly the roots of  (Theorem 5.20), and this polynomial can have, in an arbitrary field, at most
(Theorem 5.20), and this polynomial can have, in an arbitrary field, at most  roots.
roots.
The structure of irreducible polynomials.
Next we prove an important property of the irreducible polynomials over finite fields.
Theorem 5.28 Assume that  are finite fields, and let
are finite fields, and let  . Let
. Let  be the minimal polynomial of
be the minimal polynomial of  over
over  with leading coefficient
with leading coefficient  , and suppose that
, and suppose that  . Then
. Then

Moreover, the elements  are pairwise distinct.
are pairwise distinct.
Proof. Let  . If
. If  with
with  , then, using Lemma 5.23 and Theorem 5.19, we obtain
, then, using Lemma 5.23 and Theorem 5.19, we obtain

Thus  is also a root of
is also a root of  .
.
As  is a root of
is a root of  , the argument in the previous paragraph shows that so are the elements
, the argument in the previous paragraph shows that so are the elements  . Hence it suffices to show, that they are pairwise distinct. Suppose, by contradiction, that
. Hence it suffices to show, that they are pairwise distinct. Suppose, by contradiction, that  and that
and that  . Let
. Let  and let
and let  . By assumption,
. By assumption,  , which, by Lemma 5.8, means that
, which, by Lemma 5.8, means that  . From Theorem 5.24, we obtain, in this case, that
. From Theorem 5.24, we obtain, in this case, that  , which is a contradiction, as
, which is a contradiction, as  .
.
This theorem shows that a polynomial  which is irreducible over a finite field cannot have multiple roots. Further, all the roots of
which is irreducible over a finite field cannot have multiple roots. Further, all the roots of  can be obtained from a single root taking
can be obtained from a single root taking  -th powers repeatedly.
-th powers repeatedly.
Automorphisms.
In this section we characterise certain automorphisms of finite fields.
Definition 5.29 Suppose that  are finite fields. The map
are finite fields. The map  is an
is an  -automorphism of the field
-automorphism of the field  , if it is an isomorphism between rings, and
, if it is an isomorphism between rings, and  holds for all
holds for all  .
.
Recall that the map  is defined as follows:
is defined as follows:  where
where  .
.
Theorem 5.30 The set of  -automorphisms of the field
-automorphisms of the field  is formed by the maps
is formed by the maps  .
.
Proof. By Lemma 5.23, the map  is a ring homomorphism. The map
is a ring homomorphism. The map  is obviously one-to-one, and hence it is also an isomorphism. It follows from Theorem 5.19, that
is obviously one-to-one, and hence it is also an isomorphism. It follows from Theorem 5.19, that  leaves the elements
leaves the elements  fixed. Thus the maps
fixed. Thus the maps  are
are  -automorphisms of
-automorphisms of  .
.
Suppose that  , and
, and  with
with  , and that
, and that  is an
is an  -automorphism of
-automorphism of  . We claim that
. We claim that  is a root of
is a root of  . Indeed,
. Indeed,

Let  be a primitive element of
be a primitive element of  and assume now that
and assume now that  is a minimal polynomial of
is a minimal polynomial of  . By the observation above and by Theorem 5.28,
. By the observation above and by Theorem 5.28,  , with some
, with some  , that is,
, that is,  . Hence the images of a generating element of
. Hence the images of a generating element of  under the automorphisms
under the automorphisms  and
and  coincide, which gives
coincide, which gives  .
.
The construction of finite fields.
Let  . By Theorem 5.7 and Corollary 5.26, the field
. By Theorem 5.7 and Corollary 5.26, the field  can be written in the form
can be written in the form  , where
, where  is an irreducible polynomial with degree
is an irreducible polynomial with degree  .
In practical applications of field theory, for example in computer
science, this is the most common method of constructing a finite field.
Using, for instance, the polynomial
.
In practical applications of field theory, for example in computer
science, this is the most common method of constructing a finite field.
Using, for instance, the polynomial  in Example 5.2, we may construct the field
in Example 5.2, we may construct the field  . The following theorem shows that we have a good chance of obtaining an irreducible polynomial by a random selection.
. The following theorem shows that we have a good chance of obtaining an irreducible polynomial by a random selection.
Theorem 5.31 Let  be a uniformly distributed random polynomial with degree
be a uniformly distributed random polynomial with degree  and leading coefficient
and leading coefficient  . (Being uniformly distributed means that the probability of choosing
. (Being uniformly distributed means that the probability of choosing  is
is  .) Then
.) Then  is irreducible over
is irreducible over  with probability at least
with probability at least  .
.
Proof. First we estimate the number of elements  for which
for which  . We claim that the number of such elements is at least
. We claim that the number of such elements is at least
where the summation runs for the distinct prime divisors  of
of  . Indeed, if
. Indeed, if  does not generate, over
does not generate, over  , the field
, the field  , then it is contained in a maximal subfield of
, then it is contained in a maximal subfield of  , and these maximal subfields are, by Theorem5.27, exactly the fields of the form
, and these maximal subfields are, by Theorem5.27, exactly the fields of the form  . The number of distinct prime divisors of
. The number of distinct prime divisors of  are at most
are at most  , and so the number of such elements
, and so the number of such elements  is at least
is at least  . The minimal polynomials with leading coefficients 1 over
. The minimal polynomials with leading coefficients 1 over  of such elements
of such elements  have degree
have degree  and they are irreducible. Such a polynomial is a minimal polynomial of exactly
and they are irreducible. Such a polynomial is a minimal polynomial of exactly  elements
elements  (Theorem 5.28). Hence the number of distinct irreducible polynomials with degree
(Theorem 5.28). Hence the number of distinct irreducible polynomials with degree  and leading coefficient 1 in
and leading coefficient 1 in  is at least
is at least

from which the claim follows.
If, having  , we would like to construct one of its extensions
, we would like to construct one of its extensions  , then it is worth selecting a random polynomial
, then it is worth selecting a random polynomial

In other words, we select uniformly distributed random coefficients  independently. The polynomial so obtained is irreducible with a high probability (in fact, with probability at least
independently. The polynomial so obtained is irreducible with a high probability (in fact, with probability at least  if
if  is large). Further, in this case, we also have
is large). Further, in this case, we also have  . We expect that we will have to select about
. We expect that we will have to select about  polynomials before we find an irreducible one.
polynomials before we find an irreducible one.
We have seen in Theorem 5.25 that field extensions can be obtained using irreducible polynomials. It is often useful if these polynomials have some further nice properties. The following lemma claims the existence of such polynomials.
Lemma 5.32 Let  be a prime. In a finite field
be a prime. In a finite field  there exists an element which is not an
there exists an element which is not an  -th power if and only if
-th power if and only if  . If
. If  is such an element, then the polynomial
is such an element, then the polynomial  is irreducible in
is irreducible in  , and so
, and so  is a field with
is a field with  elements.
elements.
Proof. Suppose first that  and let
and let  be a positive integer such that
be a positive integer such that  . If
. If  such that
such that  , then
, then  , while if
, while if  , then
, then  . Hence, in this case, each of the elements of
. Hence, in this case, each of the elements of  is an
is an  -th power.
-th power.
Next we assume that  , and we let
, and we let  be a primitive element in
be a primitive element in  . Then, in
. Then, in  , the
, the  -th powers are exactly the following
-th powers are exactly the following  elements:
elements:  . Suppose now that
. Suppose now that  , but
, but  . Then the order of an element
. Then the order of an element  is divisible by
is divisible by  if and only if
if and only if  is not an
is not an  -th power. Let
-th power. Let  be such an element, and let
be such an element, and let  be an irreducible factor of the polynomial
be an irreducible factor of the polynomial  . Suppose that the degree of
. Suppose that the degree of  is
is  ; clearly,
; clearly,  . Then
. Then  is a field with
is a field with  elements and, in
elements and, in  , the equation
, the equation  holds. Therefore the order of
holds. Therefore the order of  is divisible by
is divisible by  . Consequently,
. Consequently,  . As
. As  is not divisible by
is not divisible by  , we have
, we have  . In other words
. In other words  . On the other hand, as
. On the other hand, as  , we find
, we find  , and hence
, and hence  , which, since
, which, since  , can only happen if
, can only happen if  .
.
In certain cases, we can use the previous lemma to boost the probability of finding an irreducible polynomial.
Claim 5.33 Let  be a prime such that
be a prime such that  . Then, for a random element
. Then, for a random element  , the polynomial
, the polynomial  is irreducible in
is irreducible in  with probability at least
with probability at least  .
.
Proof. Under the conditions, the  -th powers in
-th powers in  constitute the cyclic subgroup with order
constitute the cyclic subgroup with order  . Thus a random element
. Thus a random element  is an
is an  -th power with probability
-th power with probability  , and hence the assertion follows from Lemma 5.32.
, and hence the assertion follows from Lemma 5.32.
Remark. Assume that  , and, if
, and, if  , then assume also that
, then assume also that  . In this case there is an element
. In this case there is an element  in
in  that is not an
that is not an  -th power. We claim that that the residue class
-th power. We claim that that the residue class  is not an
is not an  -th power in
-th power in  . Indeed, by the argument in the proof of Lemma 5.32, it suffices to show that
. Indeed, by the argument in the proof of Lemma 5.32, it suffices to show that  . By our assumptions, this is clear if
. By our assumptions, this is clear if  . Now assume that
. Now assume that  , and write
, and write  . Then, for all integers
. Then, for all integers  , we have
, we have  , and so, by the assumptions,
, and so, by the assumptions,

Exercises
5.2-1 Show that the polynomial  can be factored as a product of linear factors over the field
can be factored as a product of linear factors over the field  .
.
5.2-2 Show that the polynomial  is irreducible over
is irreducible over  , that is,
, that is,  . What is the order of the element
. What is the order of the element  in the residue class ring? Is it true that the element
in the residue class ring? Is it true that the element  is primitive in
is primitive in  ?
?
5.2-3 Determine the irreducible factors of  over the field
over the field  .
.
5.2-4 Determine the subfields of  .
.
5.2-5 Let  and
and  be positive integers. Show that there exists a finite field
be positive integers. Show that there exists a finite field  containing
containing  such that
such that  and
and  . What can we say about the number of elements in
. What can we say about the number of elements in  ?
?
5.2-6 Show that the number of irreducible polynomials with degree  and leading coefficient 1 over
and leading coefficient 1 over  is at most
is at most  .
.
5.2-7 (a) Let  be a field, let
be a field, let  be an
be an  -dimensional vector space over
-dimensional vector space over  , and let
, and let  be a linear transformation whose minimal polynomial coincides with its
characteristic polynomial. Show that there exists a vector
be a linear transformation whose minimal polynomial coincides with its
characteristic polynomial. Show that there exists a vector  such that the images
such that the images  are linearly independent.
are linearly independent.
(b) A set  is said to be a normal basis of
is said to be a normal basis of  over
over  , if
, if  and
and  is a linearly independent set over
is a linearly independent set over  . Show that
. Show that  has a normal basis over
has a normal basis over  .
.
Hint. Show that a minimal polynomial of the  -linear map
-linear map  is
is  , and use part (a).
, and use part (a).
One of the problems that we often have to solve when performing symbolic computation is the factorisation problem. Factoring an algebraic expression means writing it as a product of simpler expressions. Experience shows that this can be very helpful in the solution of a large variety of algebraic problems. In this section, we consider a class of factorisation algorithms that can be used to factor polynomials in one variable over finite fields.
The input of the polynomial factorisation problem is a polynomial  . Our aim is to compute a factorisation
. Our aim is to compute a factorisation

of  where the polynomials
where the polynomials  are pairwise relatively prime and irreducible over
are pairwise relatively prime and irreducible over  , and the exponents
, and the exponents  are positive integers. By Theorem 5.4,
are positive integers. By Theorem 5.4,  determines the polynomials
determines the polynomials  and the exponents
and the exponents  essentially uniquely.
essentially uniquely.
 and let
and let 
Then it is easy to compute modulo 23 that

None of the factors  ,
,  ,
,  has a root in
has a root in  , and so they are necessarily irreducible in
, and so they are necessarily irreducible in  .
.
The factorisation algorithms are important computational tools, and so they are implemented in most of the computer algebra systems (Mathematica, Maple, etc). These algorithms are often used in the area of error-correcting codes and in cryptography.
Our aim in this section is to present some of the basic ideas and building blocks that can be used to factor polynomials over finite fields. We will place an emphasis on the existence of polynomial time algorithms. The discussion of the currently best known methods is, however, outside the scope of this book.
The factorisation problem in the previous section can efficiently be reduced to the special case when the polynomial  to be factored is square-free; that is, in (5.3),
to be factored is square-free; that is, in (5.3),  for all
for all  . The basis of this reduction is Lemma 5.13 and the following simple result. Recall that the derivative of a polynomial
. The basis of this reduction is Lemma 5.13 and the following simple result. Recall that the derivative of a polynomial  is denoted by
is denoted by  .
.
Lemma 5.34 Let  be a polynomial. If
be a polynomial. If  , then there exists a polynomial
, then there exists a polynomial  such that
such that  .
.
Proof. Suppose that  . Then
. Then  . If the coefficient
. If the coefficient  is zero in
is zero in  then either
then either  or
or  . Hence, if
. Hence, if  then
then  can be written as
can be written as  . Let
. Let  ; then choosing
; then choosing  , we have
, we have  , and so
, and so  .
.
If  , then, using the previous lemma, a factorisation of
, then, using the previous lemma, a factorisation of  into square-free factors can be obtained from that of the polynomial
into square-free factors can be obtained from that of the polynomial  , which has smaller degree. On the other hand, if
, which has smaller degree. On the other hand, if  , then, by Lemma 5.13, the polynomial
, then, by Lemma 5.13, the polynomial  is already square-free and we only have to factor
is already square-free and we only have to factor  into square-free factors. The division of polynomials and computing the
greatest common divisor can be performed in polynomial time, by Theorem
5.12. In order to compute the polynomial
into square-free factors. The division of polynomials and computing the
greatest common divisor can be performed in polynomial time, by Theorem
5.12. In order to compute the polynomial  , we need the solutions, in
, we need the solutions, in  , of equations of the form
, of equations of the form  with
with  . If
. If  , then
, then  is a solution of such an equation, which, using fast exponentiation (repeated squaring, see 33.6.1), can be obtained in polynomial time.
is a solution of such an equation, which, using fast exponentiation (repeated squaring, see 33.6.1), can be obtained in polynomial time.
One of the two reduction steps can always be performed if  is divisible by a square of a polynomial with positive degree.
is divisible by a square of a polynomial with positive degree.
Usually a polynomial can be written as a product of square-free
factors in many different ways. For the sake of uniqueness, we define
the square-free factorisation of a polynomial  as the factorisation
as the factorisation

where  are integers, and the polynomials
are integers, and the polynomials  are relatively prime and square-free. Hence we collect together the irreducible factors of
are relatively prime and square-free. Hence we collect together the irreducible factors of  with the same multiplicity. The following algorithm computes a square-free factorisation of
with the same multiplicity. The following algorithm computes a square-free factorisation of  . Besides the observations we made in this section, we also use Lemma 5.14. This lemma, combined with Lemma 5.13, guarantees that the product of the irreducible factors with multiplicity one of a polynomial
. Besides the observations we made in this section, we also use Lemma 5.14. This lemma, combined with Lemma 5.13, guarantees that the product of the irreducible factors with multiplicity one of a polynomial  over a finite field is
over a finite field is  .
.
Square-Free-Factorisation(
)
12
3
4
5
WHILE6
DOIF7
THEN8
9
ELSE10
11
IF12
THEN13
14
RETURN
The degree of the polynomial  decreases after each execution of the main loop, and the subroutines
used in this algorithm run in polynomial time. Thus the method above
can be performed in polynomial time.
decreases after each execution of the main loop, and the subroutines
used in this algorithm run in polynomial time. Thus the method above
can be performed in polynomial time.
Suppose that  is a square-free polynomial. Now we factor
is a square-free polynomial. Now we factor  as
as

where, for  , the polynomial
, the polynomial  is a product of irreducible polynomials with degree
is a product of irreducible polynomials with degree  .
Though this step is not actually necessary for the solution of the
factorisation problem, it is worth considering, as several of the known
methods can efficiently exploit the structure of the polynomials
.
Though this step is not actually necessary for the solution of the
factorisation problem, it is worth considering, as several of the known
methods can efficiently exploit the structure of the polynomials  . The following fact serves as the starting point of the distinct degree factorisation.
. The following fact serves as the starting point of the distinct degree factorisation.
Theorem 5.35 The polynomial  is the product of all the irreducible polynomials
is the product of all the irreducible polynomials  , each of which is taken with multiplicity
, each of which is taken with multiplicity  , that have leading coefficient
, that have leading coefficient  and whose degree divides
and whose degree divides  .
.
Proof. As  , all the irreducible factors of this polynomial occur with multiplicity one. If
, all the irreducible factors of this polynomial occur with multiplicity one. If  is irreducible and divides
is irreducible and divides  , then, by Theorem 5.24, the degree of
, then, by Theorem 5.24, the degree of  divides
divides  .
.
Conversely, let  be an irreducible polynomial with degree
be an irreducible polynomial with degree  such that
such that  . Then, by Theorem 5.27,
. Then, by Theorem 5.27,  has a root in
has a root in  , which implies
, which implies  .
.
The theorem offers an efficient method for computing the polynomials  . First we separate
. First we separate  from
from  , and then, step by step, we separate the product of the factors with higher degrees.
, and then, step by step, we separate the product of the factors with higher degrees.
Distinct-Degree-Factorisation(
)
12
FOR
TO3
DO4
5
RETURN
If, in this algorithm, the polynomial  is constant, then we may stop, as the further steps will not give new factors. As the polynomial
is constant, then we may stop, as the further steps will not give new factors. As the polynomial  may have large degree, computing
may have large degree, computing  must be performed with particular care. The important idea here is that the residue
must be performed with particular care. The important idea here is that the residue  can be computed using fast exponentiation.
can be computed using fast exponentiation.
The algorithm outlined above is suitable for testing whether a
polynomial is irreducible, which is one of the important problems that
we encounter when constructing finite fields. The algorithm presented
here for distinct degree factorisation can solve this problem
efficiently. For, it is obvious that a polynomial  with degree
with degree  is irreducible, if, in the factorisation (5.4), we have
is irreducible, if, in the factorisation (5.4), we have  .
.
The following algorithm for testing whether a polynomial is irreducible is somewhat more efficient than the one sketched in the previous paragraph and handles correctly also the inputs that are not square-free.
Irreducibility-Test(
)
12
IF3
THENRETURN“no” 4FORthe prime divisorsof
5
DOIF6
THENRETURN“no” 7RETURN“yes”
In lines 2 and 5, we check whether  is the smallest among the positive integers
is the smallest among the positive integers  for which
for which  divides
divides  . By Theorem 5.35, this is equivalent to the irreducibility of
. By Theorem 5.35, this is equivalent to the irreducibility of  . If
. If  survives the test in line 2, then, by Theorem 5.35, we know that
survives the test in line 2, then, by Theorem 5.35, we know that  is square-free and
is square-free and  must divide
must divide  . Using at most
. Using at most  fast exponentiations modulo
fast exponentiations modulo  , we can thus decide if
, we can thus decide if  is irreducible.
is irreducible.
Theorem 5.36 If the field  is given and
is given and  is an integer, then the field
is an integer, then the field  can be constructed using a randomised Las Vegas algorithm which runs in time polynomial in
can be constructed using a randomised Las Vegas algorithm which runs in time polynomial in  and
and  .
.
Proof. The algorithm is the following.
Finite-Field-Construction(
)
1FORto
2
DOa random element (uniformly distributed) of
3
4
IFIrreducibility-Test“yes” 5
THENRETURN6
ELSERETURN“fail”
In lines 1–3, we choose a uniformly distributed random polynomial with leading coefficient  and degree
and degree  . Then, in line 4, we efficiently check if
. Then, in line 4, we efficiently check if  is irreducible. By Theorem 5.31, the polynomial
is irreducible. By Theorem 5.31, the polynomial  is irreducible with a reasonably high probability.
is irreducible with a reasonably high probability.
In this section we consider the special case of the factorisation problem in which  is odd and the polynomial
is odd and the polynomial  is of the form
is of the form

where the  are pairwise relatively prime irreducible polynomials in
are pairwise relatively prime irreducible polynomials in  with the same degree
with the same degree  , and we also assume that
, and we also assume that  .
Our motivation for investigating this special case is that a
square-free distinct degree factorisation reduces the general
factorisation problem to such a simpler problem. If
.
Our motivation for investigating this special case is that a
square-free distinct degree factorisation reduces the general
factorisation problem to such a simpler problem. If  is even, then Berlekamp's method, presented in Subsection 5.3.4,
gives a deterministic polynomial time solution. There is a variation of
the method discussed in the present section that works also for even
is even, then Berlekamp's method, presented in Subsection 5.3.4,
gives a deterministic polynomial time solution. There is a variation of
the method discussed in the present section that works also for even  ; see Problem 5-2.
; see Problem 5-2.
Lemma 5.37 Suppose that  is odd. Then there are
is odd. Then there are  pairs
pairs  such that exactly one of
such that exactly one of  and
and  is equal to
is equal to  .
.
Proof. Suppose that  is a primitive element in
is a primitive element in  ; that is,
; that is,  , but
, but  for
for  . Then
. Then  , and further, as
, and further, as  , but
, but  , we obtain that
, we obtain that  . Therefore
. Therefore  , and so half of the element
, and so half of the element  give
give  , while the other half give
, while the other half give  . If
. If  then clearly
then clearly  . Thus there are
. Thus there are  pairs
pairs  such that
such that  , but
, but  ,
and, obviously, we have the same number of pairs for which the converse
is valid. Thus the number of pairs that satisfy the condition is
,
and, obviously, we have the same number of pairs for which the converse
is valid. Thus the number of pairs that satisfy the condition is  .
.
Theorem 5.38 Suppose that  is odd and the polynomial
is odd and the polynomial  is of the form (5.5) and has degree
is of the form (5.5) and has degree  . Choose a uniformly distributed random polynomial
. Choose a uniformly distributed random polynomial  with degree less than
with degree less than  . (That is, choose pairwise independent, uniformly distributed scalars
. (That is, choose pairwise independent, uniformly distributed scalars  , and consider the polynomial
, and consider the polynomial  .) Then, with probability at least
.) Then, with probability at least  , the greatest common divisor
, the greatest common divisor

is a proper divisor of  .
.
Proof. The element  corresponds to an element of the residue class field
corresponds to an element of the residue class field  . By the Chinese remainder theorem (Theorem 5.15), choosing the polynomial
. By the Chinese remainder theorem (Theorem 5.15), choosing the polynomial  uniformly implies that the residues of
uniformly implies that the residues of  modulo the factors
modulo the factors  are independent and uniformly distributed random polynomials. By Lemma 5.37, the probability that exactly one of the residues of the polynomial
are independent and uniformly distributed random polynomials. By Lemma 5.37, the probability that exactly one of the residues of the polynomial  modulo
modulo  and
and  is zero is precisely
is zero is precisely  . In this case the greatest common divisor in the theorem is indeed a divisor of
. In this case the greatest common divisor in the theorem is indeed a divisor of  . For, if
. For, if  , but this congruence is not valid modulo
, but this congruence is not valid modulo  , then the polynomial
, then the polynomial  is divisible by the factor
is divisible by the factor  , but not divisible by
, but not divisible by  , and so its greatest common divisor with
, and so its greatest common divisor with  is a proper divisor of
is a proper divisor of  . The function
. The function
is strictly increasing in  , and it takes its smallest possible value if
, and it takes its smallest possible value if  is the smallest odd prime-power, namely 3. The minimum is, thus,
is the smallest odd prime-power, namely 3. The minimum is, thus,  .
.
The previous theorem suggests the following randomised Las Vegas polynomial time algorithm for factoring a polynomial of the form (5.5) to a product of two factors.
Cantor-Zassenhaus-Odd(
)
12
FORto
3
DOa random element (uniformly distributed) of
4
5
6
IF7
THENRETURN8
ELSERETURN“fail”
If one of the polynomials in the output is not irreducible, then, as it is of the form (5.5), it can be fed, as input, back into the algorithm. This way we obtain a polynomial time randomised algorithm for factoring  .
.
In the computation of the greatest common divisor, the residue  should be computed using fast exponentiation.
should be computed using fast exponentiation.
Now we can conclude that the general factorisation problem (5.3) over a field with odd order can be solved using a randomised polynomial time algorithm.
Here we will describe an algorithm that reduces the problem of factoring polynomials to the problem of searching through the underlying field or its prime field. We assume that

where the  are pairwise non-associate, irreducible polynomials in
are pairwise non-associate, irreducible polynomials in  , and also that
, and also that  . The Chinese remainder theorem (Theorem 5.15) gives an isomorphism between the rings
. The Chinese remainder theorem (Theorem 5.15) gives an isomorphism between the rings  and
and

The isomorphism is given by the following map:

where  . The most important technical tools in Berlekamp's algorithm are the
. The most important technical tools in Berlekamp's algorithm are the  -th and
-th and  -th power maps in the residue class ring
-th power maps in the residue class ring  . Taking
. Taking  -th and
-th and  -th powers on both sides of the isomorphism above given by the Chinese remainder theorem, we obtain the following maps:
-th powers on both sides of the isomorphism above given by the Chinese remainder theorem, we obtain the following maps:


The Berlekamp subalgebra  of the polynomial
of the polynomial  is the subring of the residue class ring
is the subring of the residue class ring  consisting of the fixed points of the
consisting of the fixed points of the  -th power map. Further, the absolute Berlekamp subalgebra
-th power map. Further, the absolute Berlekamp subalgebra  of
of  consists of the fixed points of the
consists of the fixed points of the  -th power map. In symbols,
-th power map. In symbols,


It is easy to see that  . The term subalgebra is used here, because both types of Berlekamp subalgebras are subrings in the residue class ring
. The term subalgebra is used here, because both types of Berlekamp subalgebras are subrings in the residue class ring  (that is they are closed under addition and multiplication modulo
(that is they are closed under addition and multiplication modulo  ), and, in addition,
), and, in addition,  is also linear subspace over
is also linear subspace over  , that is, it is closed under multiplication by the elements of
, that is, it is closed under multiplication by the elements of  . The absolute Berlekamp subalgebra
. The absolute Berlekamp subalgebra  is only closed under multiplication by the elements of the prime field
is only closed under multiplication by the elements of the prime field  .
.
The Berlekamp subalgebra  is a subspace, as the map
is a subspace, as the map  is an
is an  -linear map of
-linear map of  into itself, by Lemma 5.23 and Theorem 5.19. Hence a basis of
into itself, by Lemma 5.23 and Theorem 5.19. Hence a basis of  can be computed as a solution of a homogeneous system of linear equations over
can be computed as a solution of a homogeneous system of linear equations over  , as follows.
, as follows.
For all  , compute the polynomial
, compute the polynomial  with degree at most
with degree at most  that satisfies
that satisfies  . For each
. For each  , such a polynomial
, such a polynomial  can be determined by fast exponentiation using
can be determined by fast exponentiation using  multiplications of polynomials and divisions with remainder. Set
multiplications of polynomials and divisions with remainder. Set  . The class
. The class  of a polynomial
of a polynomial  with degree less than
with degree less than  lies in the Berlekamp subalgebra if and only if
lies in the Berlekamp subalgebra if and only if
which, considering the coefficient of  for
for  , leads to the following system of
, leads to the following system of  homogeneous linear equations in
homogeneous linear equations in  variables:
variables:

Similarly, computing a basis of the absolute Berlekamp subalgebra over  can be carried out by solving a system of
can be carried out by solving a system of  homogeneous linear equations in
homogeneous linear equations in  variables over the prime field
variables over the prime field  , as follows. We represent the elements of
, as follows. We represent the elements of  in the usual way, namely using polynomials with degree less than
in the usual way, namely using polynomials with degree less than  in
in  . We perform the operations modulo
. We perform the operations modulo  , where
, where  is an irreducible polynomial with degree
is an irreducible polynomial with degree  over the prime field
over the prime field  . Then the polynomial
. Then the polynomial  of degree less than
of degree less than  can be written in the form
can be written in the form
where  . Let, for all
. Let, for all  and for all
and for all  ,
,  be the unique polynomial with degree at most
be the unique polynomial with degree at most  for which
for which  . The polynomial
. The polynomial  is of the form
is of the form  . The criterion for being a member of the absolute Berlekamp subalgebra of
. The criterion for being a member of the absolute Berlekamp subalgebra of  with
with  is
is
which, considering the coefficients of the monomials  , is equivalent to the following system of equations:
, is equivalent to the following system of equations:

This is indeed a homogeneous system of linear equations in the variables  . Systems of linear equations over fields can be solved in polynomial time (see Section 31.4), the operations in the ring
. Systems of linear equations over fields can be solved in polynomial time (see Section 31.4), the operations in the ring  can be performed in polynomial time, and the fast exponentiation also
runs in polynomial time. Thus the following theorem is valid.
can be performed in polynomial time, and the fast exponentiation also
runs in polynomial time. Thus the following theorem is valid.
Theorem 5.39 Let  . Then it is possible to compute the Berlekamp subalgebras
. Then it is possible to compute the Berlekamp subalgebras  and
and  , in the sense that an
, in the sense that an  -basis of
-basis of  and
and  -basis of
-basis of  can be obtained, using polynomial time deterministic algorithms.
can be obtained, using polynomial time deterministic algorithms.

and

The following theorem shows that the elements of the Berlekamp subalgebra can be characterised by their Chinese remainders.

and

Proof. Using the Chinese remainder theorem, and equations (5.8), (5.9), we are only required to prove that

and

where  is an irreducible polynomial,
is an irreducible polynomial,  is an arbitrary polynomial and
is an arbitrary polynomial and  is a positive integer. In both of the cases, the direction
is a positive integer. In both of the cases, the direction  is a simple consequence of Theorem 5.19. As
is a simple consequence of Theorem 5.19. As  , the implication
, the implication  concerning the absolute Berlekamp subalgebra follows from that
concerning the Berlekamp subalgebra, and so it suffices to consider the
latter.
concerning the absolute Berlekamp subalgebra follows from that
concerning the Berlekamp subalgebra, and so it suffices to consider the
latter.
The residue class ring  is a field, and so the polynomial
is a field, and so the polynomial  has at most
has at most  roots in
roots in  . However, we already obtain
. However, we already obtain  distinct roots from Theorem 5.19, namely the elements of
distinct roots from Theorem 5.19, namely the elements of  (the constant polynomials modulo
(the constant polynomials modulo  ). Thus
). Thus

Hence, if  , then
, then  is of the form
is of the form  where
where  . Let
. Let  be an arbitrary positive integer. Then
be an arbitrary positive integer. Then

If we choose  large enough so that
large enough so that  holds, then, by the congruence above,
holds, then, by the congruence above,  also holds.
also holds.
An element  of
of  or
or  is said to be non-trivial if there is no element
is said to be non-trivial if there is no element  such that
such that  . By the previous theorem and the Chinese remainder theorem, this holds if and only if there are
. By the previous theorem and the Chinese remainder theorem, this holds if and only if there are  such that
such that  . Clearly a necessary condition is that
. Clearly a necessary condition is that  , that is,
, that is,  must have at least two irreducible factors.
must have at least two irreducible factors.
Lemma 5.41 Let  be a non-trivial element of the Berlekamp subalgebra
be a non-trivial element of the Berlekamp subalgebra  . Then there is an element
. Then there is an element  such that the polynomial
such that the polynomial  is a proper divisor of
is a proper divisor of  . If
. If  , then there exists such an element
, then there exists such an element  in the prime field
in the prime field  .
.
Proof. Let  and
and  be integers such that
be integers such that  ,
,  , and
, and  . Then, choosing
. Then, choosing  , the polynomial
, the polynomial  is divisible by
is divisible by  , but not divisible by
, but not divisible by  . If, in addition,
. If, in addition,  , then also
, then also  .
.
Assume that we have a basis of  at hand. At most one of the basis elements can be trivial, as a trivial element is a scalar multiple of 1. If
at hand. At most one of the basis elements can be trivial, as a trivial element is a scalar multiple of 1. If  is not a power of an irreducible polynomial, then there will surely be a non-trivial basis element
is not a power of an irreducible polynomial, then there will surely be a non-trivial basis element  , and so, using the idea in the previous lemma,
, and so, using the idea in the previous lemma,  can be factored two factors.
can be factored two factors.
Theorem 5.42 A polynomial  can be factored with a deterministic algorithm whose running time is polynomial in
can be factored with a deterministic algorithm whose running time is polynomial in  ,
,  , and
, and  .
.
Proof. It suffices to show that  can be factored to two factors within the given time bound. The method can then be repeated.
can be factored to two factors within the given time bound. The method can then be repeated.
Berlekamp-Deterministic 
1a basis of
2
IF3
THENa non-trivial element of
4
FOR5
DO6
IF7
THENRETURN8
ELSERETURN“a power of an irreducible”
In the first stage, in line 1, we determine a basis of the absolute Berlekamp subalgebra. The cost of this is polynomial in  and
and  . In the second stage (lines 2–8), after taking a non-trivial basis element
. In the second stage (lines 2–8), after taking a non-trivial basis element  , we compute the greatest common divisors
, we compute the greatest common divisors  for all
for all  . The cost of this is polynomial in
. The cost of this is polynomial in  and
and  .
.
If there is no non-trivial basis-element, then  is 1-dimensional and
is 1-dimensional and  is the
is the  -th power of the irreducible polynomial
-th power of the irreducible polynomial  where
where  and
and  can, for instance, be determined using the ideas presented in Section 5.3.1.
can, for instance, be determined using the ideas presented in Section 5.3.1.
The time bound in the previous theorem is not polynomial in the input size, as it contains  instead of
instead of  . However, if
. However, if  is small compared to the other parameters (for instance in coding theory we often have
is small compared to the other parameters (for instance in coding theory we often have  ), then the running time of the algorithm will be polynomial in the input size.
), then the running time of the algorithm will be polynomial in the input size.
Corollary 5.43 Suppose that  can be bounded by a polynomial function of
can be bounded by a polynomial function of  and
and  . Then the irreducible factorisation of
. Then the irreducible factorisation of  can be obtained in polynomial time.
can be obtained in polynomial time.
The previous two results are due to E. R. Berlekamp. The most important open problem in the area discussed here is the existence of a deterministic polynomial time method for factoring polynomials. The question is mostly of theoretical interest, since the randomised polynomial time methods, such as the a Cantor -Zassenhaus algorithm, are very efficient in practice.
We can obtain a good randomised algorithm using Berlekamp subalgebras. Suppose that  is odd, and, as before,
is odd, and, as before,  is the polynomial to be factored.
is the polynomial to be factored.
Let  be a random element in the Berlekamp subalgebra
be a random element in the Berlekamp subalgebra  . An argument, similar to the one in the analysis of the Cantor-Zassenhaus algorithm shows that, provided
. An argument, similar to the one in the analysis of the Cantor-Zassenhaus algorithm shows that, provided  has at least two irreducible factors, the greatest common divisor
has at least two irreducible factors, the greatest common divisor  is a proper divisor of
is a proper divisor of  with probability at least 4/9. Now we present a variation of this idea
that uses less random bits: instead of choosing a random element from
with probability at least 4/9. Now we present a variation of this idea
that uses less random bits: instead of choosing a random element from  , we only choose a random element from
, we only choose a random element from  .
.
Lemma 5.44 Suppose that  is odd and let
is odd and let  and
and  be two distinct elements of
be two distinct elements of  . Then there are at least
. Then there are at least  elements
elements  such that exactly one of the elements
such that exactly one of the elements  and
and  is
is  .
.
Proof. Using the argument at the beginning of the proof of Lemma 5.37, one can easily see that there are  elements in the set
elements in the set  whose
whose  -th power is
-th power is  . It is also quite easy to check, for a given element
. It is also quite easy to check, for a given element  , that there is a unique
, that there is a unique  such that
such that  . Indeed, the required
. Indeed, the required  is the solution of a linear equation.
is the solution of a linear equation.
By the above, there are  elements
elements  such that
such that
For such a  , one of the elements
, one of the elements  and
and  is equal to
is equal to  and the other is equal to
and the other is equal to  .
.
Theorem 5.45 Suppose that  is odd and the polynomial
is odd and the polynomial  has at least two irreducible factors in
has at least two irreducible factors in  . Let
. Let  be a non-trivial element in the Berlekamp subalgebra
be a non-trivial element in the Berlekamp subalgebra  . If we choose a uniformly distributed random element
. If we choose a uniformly distributed random element  , then, with probability at least
, then, with probability at least  , the greatest common divisor
, the greatest common divisor  is a proper divisor of the polynomial
is a proper divisor of the polynomial  .
.
Proof. Let  , where the factors
, where the factors  are pairwise distinct irreducible polynomials. The element
are pairwise distinct irreducible polynomials. The element  is a non-trivial element of the Berlekamp subalgebra, and so there are indices
is a non-trivial element of the Berlekamp subalgebra, and so there are indices  and elements
and elements  such that
such that  and
and  . Using Lemma 5.44 with
. Using Lemma 5.44 with  and
and  , we find, for a random element
, we find, for a random element  , that the probability that exactly one of the elements
, that the probability that exactly one of the elements  and
and  is zero is at least
is zero is at least  . If, for instance,
. If, for instance,  , but
, but  , then
, then  but
but  , that is, the polynomial
, that is, the polynomial  is divisible by
is divisible by  , but not divisible by
, but not divisible by  . Thus the greatest common divisor
. Thus the greatest common divisor  is a proper divisor of
is a proper divisor of  .
.
The quantity  is a strictly increasing function in
is a strictly increasing function in  , and so it takes its smallest value for the smallest odd prime-power, namely 3. The minimum is 1/3.
, and so it takes its smallest value for the smallest odd prime-power, namely 3. The minimum is 1/3.
The previous theorem gives the following algorithm for factoring a polynomial to two factors.
Berlekamp-Randomised 
1a basis of
2
IF3
THENa non-trivial elements of
4
a random element (uniformly distributed) of
5
6
IF7
THENRETURN8
ELSERETURN“fail” 9ELSERETURN“a power of an irreducible”
Exercises
5.3-1 Let  be an irreducible polynomial, and let
be an irreducible polynomial, and let  be an element of the field
be an element of the field  . Give a polynomial time algorithm for computing
. Give a polynomial time algorithm for computing  .
.
Hint. Use the result of Exercise 5.1-6
5.3-2 Let  . Using the
. Using the Distinct-Degree-Factorisation algorithm, determine the factorisation (5.4) of  .
.
5.3-3 Follow the steps of the Cantor-Zassenhaus algorithm to factor the polynomial  .
.
5.3-4 Let  . Show that
. Show that  coincides with the absolute Berlekamp subalgebra of
coincides with the absolute Berlekamp subalgebra of  , that is,
, that is,  .
.
5.3-5 Let  . Using Berlekamp's algorithm, determine the irreducible factors of
. Using Berlekamp's algorithm, determine the irreducible factors of  : first find a non-trivial element in the Berlekamp subalgebra
: first find a non-trivial element in the Berlekamp subalgebra  , then use it to factor
, then use it to factor  .
.
Our aim in the rest of this chapter is to present the
Lenstra-Lenstra-Lovász algorithm for factoring polynomials with
rational coefficients. First we study a geometric problem, which is
interesting also in its own right, namely finding short lattice
vectors. Finding a shortest non-zero lattice vector is hard: by a
result of Ajtai, if this problem could be solved in polynomial time
with a randomised algorithm, then so could all the problems in the
complexity class  . For a lattice with dimension
. For a lattice with dimension  ,
the lattice reduction method presented in this chapter outputs, in
polynomial time, a lattice vector whose length is not greater than
,
the lattice reduction method presented in this chapter outputs, in
polynomial time, a lattice vector whose length is not greater than  times the length of a shortest non-zero lattice vector.
times the length of a shortest non-zero lattice vector.
First, we recall a couple of concepts related to real vector spaces. Let  denote the collection of real vectors of length
denote the collection of real vectors of length  . It is routine to check that
. It is routine to check that  is a vector space over the field
is a vector space over the field  . The scalar product of two vectors
. The scalar product of two vectors  and
and  in
in  is defined as the number
is defined as the number  . The quantity
. The quantity  is called the length of the vector
is called the length of the vector  . The vectors
. The vectors  and
and  are said to be orthogonal if
are said to be orthogonal if  . A basis
. A basis  of the space
of the space  is said to be orthonormal, if, for all
is said to be orthonormal, if, for all  ,
,  and, for all
and, for all  and
and  such that
such that  , we have
, we have  .
.
The rank and the determinant of a real matrix, and definite matrices are discussed in Section 31.1.
Definition 5.46 A set  is said to be a lattice, if
is said to be a lattice, if  is a subgroup with respect to addition, and
is a subgroup with respect to addition, and  is discrete, in the sense that each bounded region of
is discrete, in the sense that each bounded region of  contains only finitely many points of
contains only finitely many points of  . The rank of the lattice
. The rank of the lattice  is the dimension of the subspace generated by
is the dimension of the subspace generated by  . Clearly, the rank of
. Clearly, the rank of  coincides with the cardinality of a maximal linearly independent subset of
coincides with the cardinality of a maximal linearly independent subset of  . If
. If  has rank
has rank  , then
, then  is said to be a full lattice. The elements of
is said to be a full lattice. The elements of  are called lattice vectors or lattice points.
are called lattice vectors or lattice points.
Definition 5.47 Let  be linearly independent elements of a lattice
be linearly independent elements of a lattice  . If all the elements of
. If all the elements of  can be written as linear combinations of the elements
can be written as linear combinations of the elements  with integer coefficients, then the collection
with integer coefficients, then the collection  is said to be a basis of
is said to be a basis of  .
.
In this case, as the vectors  are linearly independent, all vectors of
are linearly independent, all vectors of  can uniquely be written as real linear combinations of
can uniquely be written as real linear combinations of  .
.
By the following theorem, the lattices are precisely those additive subgroups of  that have bases.
that have bases.
Theorem 5.48 Let  be linearly independent vectors in
be linearly independent vectors in  and let
and let  be the set of integer linear combinations of
be the set of integer linear combinations of  . Then
. Then  is a lattice and the vectors
is a lattice and the vectors  form a basis of
form a basis of  . Conversely, if
. Conversely, if  is a lattice in
is a lattice in  , then it has a basis.
, then it has a basis.
Obviously,  is a subgroup, that is, it is closed under addition and subtraction. In order to show that it is discrete, let us assume that
is a subgroup, that is, it is closed under addition and subtraction. In order to show that it is discrete, let us assume that  . This assumption means no loss of generality, as the subspace spanned by
. This assumption means no loss of generality, as the subspace spanned by  is isomorphic to
is isomorphic to  . In this case,
. In this case,  is an invertible linear map of
is an invertible linear map of  onto itself. Consequently, both
onto itself. Consequently, both  and
and  are continuous. Hence the image of a discrete set under
are continuous. Hence the image of a discrete set under  is also discrete. As
is also discrete. As  , it suffices to show that
, it suffices to show that  is discrete in
is discrete in  . This, however, is obvious: if
. This, however, is obvious: if  is a bounded region in
is a bounded region in  , then there is a positive integer
, then there is a positive integer  , such that the absolute value of each of the coordinates of the elements of
, such that the absolute value of each of the coordinates of the elements of  is at most
is at most  . Thus
. Thus  has at most
has at most  elements in
elements in  .
.
The second assertion is proved by induction on  . If
. If  , then we have nothing to prove. Otherwise, by discreteness, there is a shortest non-zero vector,
, then we have nothing to prove. Otherwise, by discreteness, there is a shortest non-zero vector,  say, in
say, in  . We claim that the vectors of
. We claim that the vectors of  that lie on the line
that lie on the line  are exactly the integer multiples of
are exactly the integer multiples of  . Indeed, suppose that
. Indeed, suppose that  is a real number and consider the vector
is a real number and consider the vector  . As usual,
. As usual,  denotes the fractional part of
denotes the fractional part of  . Then
. Then  , yet
, yet  , that is
, that is  is the difference of two vectors of
is the difference of two vectors of  , and so is itself in
, and so is itself in  . This, however, contradicts to the fact that
. This, however, contradicts to the fact that  was a shortest non-zero vector in
was a shortest non-zero vector in  . Thus our claim holds.
. Thus our claim holds.
The claim verified in the previous paragraph shows that the theorem is valid when  . Let us, hence, assume that
. Let us, hence, assume that  . We may write an element of
. We may write an element of  as the sum of two vectors, one of them is parallel to
as the sum of two vectors, one of them is parallel to  and the other one is orthogonal to
and the other one is orthogonal to  :
:
Simple computation shows that  , and the map
, and the map  is linear. Let
is linear. Let  . We show that
. We show that  is a lattice in the subspace, or hyperplane,
is a lattice in the subspace, or hyperplane,  formed by the vectors orthogonal to
formed by the vectors orthogonal to  . The map
. The map  is linear, and so
is linear, and so  is closed under addition and subtraction. In order to show that it is discrete, let
is closed under addition and subtraction. In order to show that it is discrete, let  be a bounded region in
be a bounded region in  . We are required to show that only finitely many points of
. We are required to show that only finitely many points of  are in
are in  . Let
. Let  be a vector such that
be a vector such that  . Let
. Let  be the integer that is closest to the number
be the integer that is closest to the number  and let
and let  . Clearly,
. Clearly,  and
and  . Further, we also have that
. Further, we also have that  , and so the vector
, and so the vector  lies in the bounded region
lies in the bounded region  . However, there are only finitely many vectors
. However, there are only finitely many vectors  in this latter region, and so
in this latter region, and so  also has only finitely many lattice vectors
also has only finitely many lattice vectors  .
.
We have, thus, shown that  is a lattice in
is a lattice in  , and, by the induction hypothesis, it has a basis. Let
, and, by the induction hypothesis, it has a basis. Let  be lattice vectors such that the vectors
be lattice vectors such that the vectors  form a basis of the lattice
form a basis of the lattice  . Then, for an arbitrary lattice vector
. Then, for an arbitrary lattice vector  , the vector
, the vector  can be written in the form
can be written in the form  where the coefficients
where the coefficients  are integers. Then
are integers. Then  and, as the map
and, as the map  is linear, we have
is linear, we have  . This, however, implies that
. This, however, implies that  is a lattice vector on the line
is a lattice vector on the line  , and so
, and so  with some integer
with some integer  . Therefore
. Therefore  , that is,
, that is,  is an integer linear combination of the vectors
is an integer linear combination of the vectors  . Thus the vectors
. Thus the vectors  form a basis of
form a basis of  .
.
A lattice  is always full in the linear subspace spanned by
is always full in the linear subspace spanned by  . Thus, without loss of generality, we will consider only full lattices, and, in the sequel, by a lattice we will always mean a full lattice.
. Thus, without loss of generality, we will consider only full lattices, and, in the sequel, by a lattice we will always mean a full lattice.
Example 5.4 Two familiar lattices in  :
:
1. The square lattice is the lattice in  with basis
with basis  .
.
2. The triangular lattice is the lattice with basis  ,
,  .
.
The following simple fact will often be used.
Lemma 5.49 Let  be a lattice in
be a lattice in  , and let
, and let  be a basis of
be a basis of  . If we reorder the basis vectors
. If we reorder the basis vectors  ,
or if we add to a basis vector an integer linear combination of the
other basis vectors, then the collection so obtained will also form a
basis of
,
or if we add to a basis vector an integer linear combination of the
other basis vectors, then the collection so obtained will also form a
basis of  .
.
Let  be a basis in
be a basis in  . The Gram matrix of
. The Gram matrix of  is the matrix
is the matrix  with entries
with entries  . The matrix
. The matrix  is positive definite, since it is of the form
is positive definite, since it is of the form  where
where  is a full-rank matrix (see Theorem 31.6). Consequently,
is a full-rank matrix (see Theorem 31.6). Consequently,  is a positive real number.
is a positive real number.
Lemma 5.50 Let  and
and  be bases of a lattice
be bases of a lattice  and let
and let  and
and  be the matrices
be the matrices  and
and  . Then the determinants of
. Then the determinants of  and
and  coincide.
coincide.
For all  , the vector
, the vector  is of the form
is of the form  where the
where the  are integers. Let
are integers. Let  be the matrix with entries
be the matrix with entries  . Then, as
. Then, as

we have  , and so
, and so  . The number
. The number  is a non-negative integer, since the entries of
is a non-negative integer, since the entries of  are integers. Swapping the two bases, the same argument shows that
are integers. Swapping the two bases, the same argument shows that  is also a non-negative integer. This can only happen if
is also a non-negative integer. This can only happen if  .
.
Definition 5.51 (The determinant of a lattice) The determinant of a lattice  is
is  where
where  is the Gram matrix of a basis of
is the Gram matrix of a basis of  .
.
By the previous lemma,  is independent of the choice of the basis. The quantity
is independent of the choice of the basis. The quantity  has a geometric meaning, as
has a geometric meaning, as  is the volume of the solid body, the so-called parallelepiped, formed by the vectors
is the volume of the solid body, the so-called parallelepiped, formed by the vectors  .
.
Remark 5.52 Assume that the coordinates of the vectors  in an orthonormal basis of
in an orthonormal basis of  are
are  (
( ). Then the Gram matrix
). Then the Gram matrix  of the vectors
of the vectors  is
is  where
where  is the matrix
is the matrix  . Consequently, if
. Consequently, if  is a basis of a lattice
is a basis of a lattice  , then
, then  .
.
Proof. The assertion follows from the equations  .
.
We will need a fundamental result in convex geometry. In order to prepare for this, we introduce some simple notation. Let  . The set
. The set  is said to be centrally symmetric, if
is said to be centrally symmetric, if  implies
implies  . The set
. The set  is convex, if
is convex, if  implies
implies  for all
for all  .
.
Theorem 5.53 (Minkowski's Convex Body Theorem) Let  be a lattice in
be a lattice in  and let
and let  be a centrally symmetric, bounded, closed, convex set. Suppose that the volume of
be a centrally symmetric, bounded, closed, convex set. Suppose that the volume of  is at least
is at least  . Then
. Then  .
.
Proof. By the conditions, the volume of the set  is at least
is at least  . Let
. Let  be a basis of the lattice
be a basis of the lattice  and let
and let  be the corresponding half-open parallelepiped. Then each of the vectors in
be the corresponding half-open parallelepiped. Then each of the vectors in  can be written uniquely in the form
can be written uniquely in the form  where
where  and
and  . For an arbitrary lattice vector
. For an arbitrary lattice vector  , we let
, we let

As the sets  and
and  are bounded, so is the set
are bounded, so is the set

As  is discrete,
is discrete,  only has finitely many points in
only has finitely many points in  ; that is,
; that is,  , except for finitely many
, except for finitely many  . Hence
. Hence  is a finite set, and, moreover, the set
is a finite set, and, moreover, the set  is the disjoint union of the sets
is the disjoint union of the sets  (
( ). Therefore, the total volume of these sets is at least
). Therefore, the total volume of these sets is at least  . For a given
. For a given  , we set
, we set  . Consider the closure
. Consider the closure  and
and  of the sets
of the sets  and
and  , respectively:
, respectively:

and  . The total volume of the closed sets
. The total volume of the closed sets  is at least as large as the volume of the set
is at least as large as the volume of the set  , and so these sets cannot be disjoint: there are
, and so these sets cannot be disjoint: there are  and
and  such that
such that  , that is,
, that is,  and
and  . As
. As  is centrally symmetric, we find that
is centrally symmetric, we find that  . As
. As  is convex, we also have
is convex, we also have  . Hence
. Hence  . On the other hand, the difference
. On the other hand, the difference  of two lattice points lies in
of two lattice points lies in  .
.
Minkowski's theorem is sharp. For, let  be an arbitrary positive number, and let
be an arbitrary positive number, and let  be the lattice of points with integer coordinates in
be the lattice of points with integer coordinates in  . Let
. Let  be the set of vectors
be the set of vectors  for which
for which  (
( ). Then
). Then  is bounded, closed, convex, centrally symmetric with respect to the origin, its volume is
is bounded, closed, convex, centrally symmetric with respect to the origin, its volume is  , yet
, yet  .
.
Corollary 5.54 Let  be a lattice in
be a lattice in  . Then
. Then  has a lattice vector
has a lattice vector  whose length is at most
whose length is at most  .
.
Proof. Let  be the following centrally symmetric cube with side length
be the following centrally symmetric cube with side length  :
:

The volume of the cube  is exactly
is exactly  , and so it contains a non-zero lattice vector. However, the vectors in
, and so it contains a non-zero lattice vector. However, the vectors in  have length at most
have length at most  .
.
We remark that, for  , we can find an even shorter lattice vector, if we replace the cube in the proof of the previous assertion by a suitable ball.
, we can find an even shorter lattice vector, if we replace the cube in the proof of the previous assertion by a suitable ball.
Our goal is to design an algorithm that finds a non-zero short
vector in a given lattice. In this section we consider this problem for
two-dimensional lattices, which is the simplest non-trivial case. Then
there is an elegant, instructive, and efficient algorithm that finds
short lattice vectors. This algorithm also serves as a basis for the
higher-dimensional cases. Let  be a lattice with basis
be a lattice with basis  in
in  .
.
Gauss(
)
12
FOREVER3DOthe shortest lattice vector on the line
4
IF5
THEN6
ELSERETURN
In order to analyse the procedure, the following facts will be useful.
Lemma 5.55 Suppose that  and
and  are two linearly independent vectors in the plane
are two linearly independent vectors in the plane  , and let
, and let  be the lattice generated by them. The vector
be the lattice generated by them. The vector  is a shortest non-zero vector of
is a shortest non-zero vector of  on the line
on the line  if and only if
if and only if

Proof. We write  as the sum of a vector parallel to
as the sum of a vector parallel to  and a vector orthogonal to
and a vector orthogonal to  :
:

Then, as the vectors  and
and  are orthogonal,
are orthogonal,

This quantity takes its smallest value for the integer  that is the closest to the number
that is the closest to the number  . Hence
. Hence  gives the minimal value if and only if (5.10) holds.
gives the minimal value if and only if (5.10) holds.
Lemma 5.56 Suppose that the linearly independent vectors  and
and  form a basis for a lattice
form a basis for a lattice  and that inequality (5.10) holds. Assume, further, that
and that inequality (5.10) holds. Assume, further, that

Write  , as in (5.11), as the sum of the vector
, as in (5.11), as the sum of the vector  , which is parallel to
, which is parallel to  , and the vector
, and the vector  , which is orthogonal to
, which is orthogonal to  . Then
. Then

Further, either  or
or  is a shortest non-zero vector in
is a shortest non-zero vector in  .
.

Rearranging the last displayed line, we obtain  .
.
The length of a vector  can be computed as
can be computed as

which implies  whenever
whenever  . If
. If  and
and  , then
, then  . Similarly,
. Similarly,  and
and  gives
gives  . It remains to consider the case when
. It remains to consider the case when  and
and  . As
. As  , we may assume that
, we may assume that  . In this case, however,
. In this case, however,  is of the form
is of the form  (
( ), and, by Lemma 5.55, the vector
), and, by Lemma 5.55, the vector  is a shortest lattice vector on this line.
is a shortest lattice vector on this line.
Theorem 5.57 Let  be a shortest non-zero lattice vector in
be a shortest non-zero lattice vector in  . Then Gauss' algorithm terminates after
. Then Gauss' algorithm terminates after  iterations, and the resulting vector
iterations, and the resulting vector  is a shortest non-zero vector in
is a shortest non-zero vector in  .
.
Proof. First we verify that, during the course of the algorithm, the vectors  and
and  will always form a basis for the lattice
will always form a basis for the lattice  . If, in line 3, we replace
. If, in line 3, we replace  by a vector of the form
by a vector of the form  , then, as
, then, as  , the pair
, the pair  remains a basis of
remains a basis of  . The swap in line 5 only concerns the order of the basis vectors. Thus
. The swap in line 5 only concerns the order of the basis vectors. Thus  and
and  is always a basis of
is always a basis of  , as we claimed.
, as we claimed.
By Lemma 5.55, inequality (5.10) holds after the first step (line 3) in the loop, and so we may apply Lemma 5.56 to the scenario before lines 4–5. This shows that if none of  and
and  is shortest, then
is shortest, then  . Thus, except perhaps for the last execution of the loop, after each swap in line 5, the length of
. Thus, except perhaps for the last execution of the loop, after each swap in line 5, the length of  is decreased by a factor of at least
is decreased by a factor of at least  . Thus we obtain the bound for the number of executions of the loop. Lemma 5.56 implies also that the vector
. Thus we obtain the bound for the number of executions of the loop. Lemma 5.56 implies also that the vector  at the end is a shortest non-zero vector in
at the end is a shortest non-zero vector in  .
.
Gauss' algorithm gives an efficient polynomial time method for computing a shortest vector in the lattice  . The analysis of the algorithm gives the following interesting theoretical consequence.
. The analysis of the algorithm gives the following interesting theoretical consequence.
Corollary 5.58 Let  be a lattice in
be a lattice in  , and let
, and let  be a shortest non-zero lattice vector in
be a shortest non-zero lattice vector in  . Then
. Then  .
.
Proof. Let  be a vector in
be a vector in  such that
such that  is linearly independent of
is linearly independent of  and (5.10) holds. Then
and (5.10) holds. Then

which yields  . The area of the fundamental parallelogram can be computed using the well-known formula
. The area of the fundamental parallelogram can be computed using the well-known formula

and so  . The number
. The number  can now be bounded by the previous inequality.
can now be bounded by the previous inequality.
Let  be a linearly independent collection of vectors in
be a linearly independent collection of vectors in  . For an index
. For an index  with
with  , we let
, we let  denote the component of
denote the component of  that is orthogonal to the subspace spanned by
that is orthogonal to the subspace spanned by  . That is,
. That is,
where

Clearly  . The vectors
. The vectors  span the same subspace as the vectors
span the same subspace as the vectors  , and so, with suitable coefficients
, and so, with suitable coefficients  , we may write
, we may write

and

By the latter equations, the vectors  form an orthogonal system, and so
form an orthogonal system, and so

The set of the vectors  is said to be the Gram-Schmidt orthogonalisation of the vectors
is said to be the Gram-Schmidt orthogonalisation of the vectors  .
.
Lemma 5.59 Let  be a lattice with basis
be a lattice with basis  . Then
. Then
Proof. Set  and
and  , if
, if  . Then
. Then  , and so
, and so
that is,  where
where  and
and  are the Gram matrices of the collections
are the Gram matrices of the collections  and
and  , respectively, and
, respectively, and  is the matrix with entries
is the matrix with entries  . The matrix
. The matrix  is a lower triangular matrix with ones in the main diagonal, and so
is a lower triangular matrix with ones in the main diagonal, and so  . As
. As  is a diagonal matrix, we obtain
is a diagonal matrix, we obtain  .
.
Corollary 5.60 (Hadamard inequality)  .
.
Proof. The vector  can be written as the sum of the vector
can be written as the sum of the vector  and a vector orthogonal to
and a vector orthogonal to  , and hence
, and hence  .
.
The vector  is the component of
is the component of  orthogonal to the subspace spanned by the vectors
orthogonal to the subspace spanned by the vectors  . Thus
. Thus  does not change if we subtract a linear combination of the vectors
does not change if we subtract a linear combination of the vectors  from
from  . If, in this linear combination, the coefficients are integers, then the new sequence
. If, in this linear combination, the coefficients are integers, then the new sequence  will be a basis of the same lattice as the original. Similarly to the
first step of the loop in Gauss' algorithm, we can make the numbers
will be a basis of the same lattice as the original. Similarly to the
first step of the loop in Gauss' algorithm, we can make the numbers  in (5.15) small. The input of the following procedure is a basis
in (5.15) small. The input of the following procedure is a basis  of a lattice
of a lattice  .
.
Weak-Reduction 
1FOR
DOWNTO2
DOFOR
TO3
where
is the integer nearest the number
4
RETURN
Definition 5.61 (Weakly reduced basis) A basis  of a lattice is said to be weakly reduced if the coefficients
of a lattice is said to be weakly reduced if the coefficients  in (5.15) satisfy
in (5.15) satisfy

Lemma 5.62 The basis given by the procedure Weak-Reduction is weakly reduced.
Proof. By the remark preceding the algorithm, we obtain that the vectors  never change. Indeed, we only subtract linear combinations of vectors with index less than
never change. Indeed, we only subtract linear combinations of vectors with index less than  from
from  . Hence the inner instruction does not change the value of
. Hence the inner instruction does not change the value of  with
with  . The values of the
. The values of the  do not change for
do not change for  either. On the other hand, the instruction achieves, with the new
either. On the other hand, the instruction achieves, with the new  , that the inequality
, that the inequality  holds:
holds:

By the observations above, this inequality remains valid during the execution of the procedure.
First we define, in an arbitrary dimension, a property of the bases that usually turns out to be useful. The definition will be of a technical nature. Later we will see that these bases are interesting, in the sense that they consist of short vectors. This property will make them widely applicable.
Definition 5.63 A basis  of a lattice
of a lattice  is said to be (Lovász-)reduced if
is said to be (Lovász-)reduced if
 it is weakly reduced,
it is weakly reduced,
and, using the notation introduced for the Gram-Schmidt orthogonalisation,

 for all
for all  .
.
Let us observe the analogy of the conditions above to the
inequalities that we have seen when investigating Gauss' algorithm. For
 ,
,  and
and  , being weakly reduced ensures that
, being weakly reduced ensures that  is a shortest vector on the line
is a shortest vector on the line  . The second condition is equivalent to the inequality
. The second condition is equivalent to the inequality  , but here it is expressed in terms of the Gram-Schmidt basis. For a general index
, but here it is expressed in terms of the Gram-Schmidt basis. For a general index  , the same is true, if
, the same is true, if  plays the role of the vector
plays the role of the vector  , and
, and  plays the role of the component of the vector
plays the role of the component of the vector  that is orthogonal to the subspace spanned by
that is orthogonal to the subspace spanned by  .
.
Lovász-Reduction 
1FOREVER2DOWeak-Reduction3 find an index
for which the second condition of being reduced is violated 4
IFthere is such an5
THEN6
ELSERETURN

Theorem 5.64 Suppose that in the lattice  each of the pairs of the lattice vectors has an integer scalar product. Then the swap in the 5th line of the
each of the pairs of the lattice vectors has an integer scalar product. Then the swap in the 5th line of the Lovász-Reduction occurs at most  times where
times where  is the upper left
is the upper left  -subdeterminant of the Gram matrix of the initial basis
-subdeterminant of the Gram matrix of the initial basis  .
.
Proof. The determinant  is the determinant of the Gram matrix of
is the determinant of the Gram matrix of  , and, by the observations we made at the discussion of the Gram-Schmidt orthogonalisation,
, and, by the observations we made at the discussion of the Gram-Schmidt orthogonalisation,  . This, of course, implies that
. This, of course, implies that  for
for  . By the above, the procedure
. By the above, the procedure Weak-Reduction cannot change the vectors  , and so it does not change the product
, and so it does not change the product  either. Assume, in line 5 of the procedure, that a swap
either. Assume, in line 5 of the procedure, that a swap  takes place. Observe that, unless
takes place. Observe that, unless  , the sets
, the sets  do not change, and neither do the determinants
do not change, and neither do the determinants  . The role of the vector
. The role of the vector  is taken over by the vector
is taken over by the vector  , whose length, because of the conditions of the swap, is at most
, whose length, because of the conditions of the swap, is at most  times the length of
times the length of  . That is, the new
. That is, the new  is at most
is at most  times the old. By the observation above, the new value of
times the old. By the observation above, the new value of  will also be at most
will also be at most  times the old one. Then the assertion follows from the fact that the quantity
times the old one. Then the assertion follows from the fact that the quantity  remains a positive integer.
remains a positive integer.
Corollary 5.65 Under the conditions of the previous theorem, the cost of the procedure Lovász-Reduction is at most  arithmetic operations with rational numbers where
arithmetic operations with rational numbers where  is the maximum of
is the maximum of  and the quantities
and the quantities  with
with  .
.
Proof. It follows from the Hadamard inequality that

Hence  and
and  .
By the previous theorem, this is the number of iterations in the
algorithm. The cost of the Gram-Schmidt orthogonalisation is
.
By the previous theorem, this is the number of iterations in the
algorithm. The cost of the Gram-Schmidt orthogonalisation is  operations, and the cost of weak reduction is
operations, and the cost of weak reduction is  scalar product computations, each of which can be performed using
scalar product computations, each of which can be performed using  operations (provided the vectors are represented by their coordinates in an orthogonal basis).
operations (provided the vectors are represented by their coordinates in an orthogonal basis).
One can show that the length of the integers that occur during the run of the algorithm (including the numerators and the denominators of the fractions in the Gram-Schmidt orthogonalisation) will be below a polynomial bound.
Theorem 5.67 of this
section gives a summary of the properties of reduced bases that turn
out to be useful in their applications. We will find that a reduced
basis consists of relatively short vectors. More precisely,  will approximate, within a constant factor depending only on the dimension, the length of a shortest non-zero lattice vector.
will approximate, within a constant factor depending only on the dimension, the length of a shortest non-zero lattice vector.
Lemma 5.66 Let us assume that the vectors  form a reduced basis of a lattice
form a reduced basis of a lattice  . Then, for
. Then, for  ,
,

In particular,

Proof. Substituting  ,
,  , Lemma 5.56 gives, for all
, Lemma 5.56 gives, for all  , tha
, tha

Thus, inequality (5.16) follows by induction.
Now we can formulate the fundamental theorem of reduced bases.
Theorem 5.67 Assume that the vectors  form a reduced basis of a lattice
form a reduced basis of a lattice  . Then
. Then
(i)  .
.
(ii)  for all lattice vectors
for all lattice vectors  . In particular, the length of
. In particular, the length of  is not greater than
is not greater than  times the length of a shortest non-zero lattice vector.
times the length of a shortest non-zero lattice vector.
(iii)  .
.
Proof. (i) Using inequality (5.17),

and so assertion (i) holds.
(ii) Let  with
with  be a lattice vector. Assume that
be a lattice vector. Assume that  is the last non-zero coefficient and write
is the last non-zero coefficient and write  where
where  is a linear combination of the vectors
is a linear combination of the vectors  . Hence
. Hence  where
where  lies in the subspace spanned by
lies in the subspace spanned by  . As
. As  is orthogonal to this subspace,
is orthogonal to this subspace,

and so assertion (ii) is valid.
(iii) First we show that  . This inequality is obvious if
. This inequality is obvious if  , and so we assume that
, and so we assume that  . Using the decomposition (5.14) of the vector
. Using the decomposition (5.14) of the vector  and the fact that the basis is weakly reduced, we obtain that
and the fact that the basis is weakly reduced, we obtain that
Multiplying these inequalities for  ,
,

which is precisely the inequality in (iii).
It is interesting to compare assertion (i) in the previous theorem and Corollary 5.54 after Minkowski's theorem. Here we obtain a weaker bound for the length of  ,
but this vector can be obtained by an efficient algorithm. Essentially,
the existence of the basis that satisfies assertion (iii) was first
shown by Hermite using the tools in the proofs of Theorems 5.48 and 5.67. Using a Lovász-reduced basis, the cost of finding a shortest vector in a lattice with dimension
,
but this vector can be obtained by an efficient algorithm. Essentially,
the existence of the basis that satisfies assertion (iii) was first
shown by Hermite using the tools in the proofs of Theorems 5.48 and 5.67. Using a Lovász-reduced basis, the cost of finding a shortest vector in a lattice with dimension  is at most polynomial in the input size and in
is at most polynomial in the input size and in  ; see Exercise 5.4-4.
; see Exercise 5.4-4.
Exercises
5.4-1 The triangular lattice is optimal. Show that the bound in Corollary 5.58 is sharp. More precisely, let  be a full lattice and let
be a full lattice and let  be a shortest vector in
be a shortest vector in  . Verify that the inequality
. Verify that the inequality  holds if and only if
holds if and only if  is similar to the triangular lattice.
is similar to the triangular lattice.
5.4-2 The denominators of the Gram-Schmidt numbers. Let us assume that the Gram matrix of a basis  has only integer entries. Show that the numbers
has only integer entries. Show that the numbers  in (5.15) can be written in the form
in (5.15) can be written in the form  where the
where the  are integers and
are integers and  is the determinant of the Gram matrix of the vectors
is the determinant of the Gram matrix of the vectors  .
.
5.4-3 The length of the vectors in a reduced basis. Let  be a reduced basis of a lattice
be a reduced basis of a lattice  and let us assume that the numbers
and let us assume that the numbers  are integers. Give an upper bound depending only on
are integers. Give an upper bound depending only on  and
and  for the length of the vectors
for the length of the vectors  . More precisely, prove that
. More precisely, prove that

5.4-4 The coordinates of a shortest lattice vector. Let  be a reduced basis of a lattice
be a reduced basis of a lattice  . Show that each of the shortest vectors in
. Show that each of the shortest vectors in  is of the form
is of the form  where
where  and
and  . Consequently, for a bounded
. Consequently, for a bounded  , one can find a shortest non-zero lattice vector in polynomial time.
, one can find a shortest non-zero lattice vector in polynomial time.
Hint. Assume, for some lattice vector  , that
, that  . Let us write
. Let us write  in the basis
in the basis  :
:
It follows from the assumption that each of the components of  (in the orthogonal basis) is at most as long as
(in the orthogonal basis) is at most as long as  :
:
Use then the inequalities  and (5.17).
and (5.17).
In this section we study the problem of factoring polynomials with rational coefficients. The input of the factorisation problem is a polynomial  . Our goal is to compute a factorisation
. Our goal is to compute a factorisation

where the polynomials  are pairwise relatively prime, and irreducible over
are pairwise relatively prime, and irreducible over  , and the numbers
, and the numbers  are positive integers. By Theorem 5.4,
are positive integers. By Theorem 5.4,  determines, essentially uniquely, the polynomials
determines, essentially uniquely, the polynomials  and the exponents
and the exponents  .
.
First we reduce the problem (5.18) to another problem that can be handled more easily.
Lemma 5.68 We may assume that the polynomial  has integer coefficients and it has leading coefficient
has integer coefficients and it has leading coefficient  .
.
Proof. Multiplying by the common denominator of the coefficients, we may assume that  . Performing the substitution
. Performing the substitution  , we obtain the polynomial
, we obtain the polynomial

which has integer coefficients and its leading coefficient is 1. Using a factorisation of  , a factorisation of
, a factorisation of  can be obtained efficiently.
can be obtained efficiently.
Definition 5.69 A polynomial  is said to be primitive, if the greatest common divisor of its coefficients is
is said to be primitive, if the greatest common divisor of its coefficients is  .
.
A polynomial  can be written in a unique way as the product of an integer and a primitive polynomial in
can be written in a unique way as the product of an integer and a primitive polynomial in  . Indeed, if
. Indeed, if  is the greatest common divisor of the coefficients, then
is the greatest common divisor of the coefficients, then  . Clearly,
. Clearly,  is a primitive polynomial with integer coefficients.
is a primitive polynomial with integer coefficients.
Lemma 5.70 (Gauss' Lemma) If  are primitive polynomials, then so is the product
are primitive polynomials, then so is the product  .
.
Proof. We argue by contradiction and assume that  is a prime number that divides all the coefficients of
is a prime number that divides all the coefficients of  . Set
. Set  ,
,  and let
and let  and
and  be the smallest indices such that
be the smallest indices such that  and
and  . Let
. Let  and consider the coefficient of
and consider the coefficient of  in the product
in the product  . This coefficient is
. This coefficient is

Both of the sums on the right-hand side of this equation are divisible by  , while
, while  is not, and hence the coefficient of
is not, and hence the coefficient of  in
in  cannot be divisible by
cannot be divisible by  after all. This, however, is a contradiction.
after all. This, however, is a contradiction.
Claim 5.71 Let us assume that  are polynomials with rational coefficients and leading coefficient
are polynomials with rational coefficients and leading coefficient  such that the product
such that the product  has integer coefficients. Then the polynomials
has integer coefficients. Then the polynomials  and
and  have integer coefficients.
have integer coefficients.
Proof. Let us multiply  and
and  by the least common multiple
by the least common multiple  and
and  , respectively, of the denominators of their coefficients. Then the polynomials
, respectively, of the denominators of their coefficients. Then the polynomials  and
and  are primitive polynomials with integer coefficients. Hence, by Gauss' Lemma, so is the product
are primitive polynomials with integer coefficients. Hence, by Gauss' Lemma, so is the product  . As the coefficients of
. As the coefficients of  are integers, each of its coefficients is divisible by the integer
are integers, each of its coefficients is divisible by the integer  . Hence
. Hence  , and so
, and so  . Therefore
. Therefore  and
and  are indeed polynomials with integer coefficients.
are indeed polynomials with integer coefficients.
One can show similarly, for a polynomial  , that factoring
, that factoring  in
in  is equivalent to factoring the primitive part of
is equivalent to factoring the primitive part of  in
in  and factoring an integer, namely the greatest common divisor of the coefficients
and factoring an integer, namely the greatest common divisor of the coefficients
As we work over an infinite field, we have to pay attention to the size of the results in our computations.
Definition 5.72 The norm of a polynomial  with complex coefficients is the real number
with complex coefficients is the real number  .
.
The inequality  implies that a polynomial
implies that a polynomial  with integer coefficients can be described using
with integer coefficients can be described using  bits.
bits.
Lemma 5.73 Let  be a polynomial with complex coefficients. Then, for all
be a polynomial with complex coefficients. Then, for all  , we have
, we have

where  is the usual conjugate of the complex number
is the usual conjugate of the complex number  .
.
Proof. Let us assume that  and set
and set  . Then
. Then
and hence

Performing similar computations with the right-hand side of the equation in the lemma, we obtain that

and so

The proof of the lemma is now complete.
Theorem 5.74 (Mignotte) Let us assume that the polynomials  have complex coefficients and leading coefficient
have complex coefficients and leading coefficient  and that
and that  . If
. If  , then
, then  .
.
Proof. By the fundamental theorem of algebra,  where
where  are the complex roots of the polynomial
are the complex roots of the polynomial  (with multiplicity). Then there is a subset
(with multiplicity). Then there is a subset  such that
such that  . First we claim, for an arbitrary set
. First we claim, for an arbitrary set  , that
, that

If  contains an integer
contains an integer  with
with  , then this inequality will trivially hold. Let us hence assume that
, then this inequality will trivially hold. Let us hence assume that  for every
for every  . Set
. Set  and
and  . Applying Lemma 5.73 several times, we obtain that
. Applying Lemma 5.73 several times, we obtain that

where  . As the leading coefficient of
. As the leading coefficient of  is 1,
is 1,  , and so
, and so

Let us express the coefficients of  using its roots:
using its roots:
For an arbitrary polynomial  , the inequality
, the inequality  is valid. Therefore, using inequality (5.19), we find that
is valid. Therefore, using inequality (5.19), we find that
The proof is now complete.
Corollary 5.75 The bit size of the irreducible factors in  of an
of an  with leading coefficient
with leading coefficient  is polynomial in the bit size of
is polynomial in the bit size of  .
.
Let  be an arbitrary field, and let
be an arbitrary field, and let  be polynomials with degree
be polynomials with degree  and
and  , respectively:
, respectively:  ,
,  where
where  . We recall the concept of the resultant from Chapter 3. The resultant of
. We recall the concept of the resultant from Chapter 3. The resultant of  and
and  is the determinant of the
is the determinant of the  -matrix
-matrix
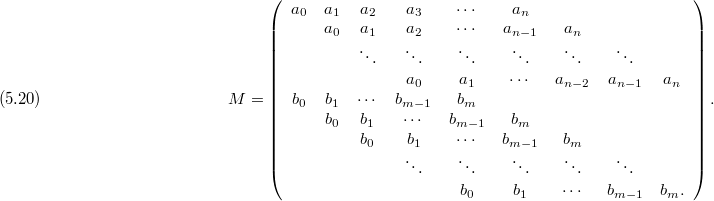
The matrix above is usually referred to as the Sylvester matrix. The blank spaces in the Sylvester matrix represent zero entries.
The resultant provides information about the common factors of  and
and  . One can use it to express, particularly elegantly, the fact that two polynomials are relatively prime:
. One can use it to express, particularly elegantly, the fact that two polynomials are relatively prime:

Corollary 5.76 Let  be a square-free (in
be a square-free (in  ), non-constant polynomial. Then
), non-constant polynomial. Then  is an integer. Further, assume that
is an integer. Further, assume that  is a prime not dividing
is a prime not dividing  . Then the polynomial
. Then the polynomial  is square-free in
is square-free in  if and only if
if and only if  does not divide
does not divide  .
.
Proof. The entries of the Sylvester matrix corresponding to  and
and  are integers, and so is its determinant. The polynomial
are integers, and so is its determinant. The polynomial  has no multiple roots over
has no multiple roots over  , and so, by Exercise 5.5-1,
, and so, by Exercise 5.5-1,  , which gives, using (5.21), that
, which gives, using (5.21), that  . Let
. Let  denote the polynomial
denote the polynomial  reduced modulo
reduced modulo  . Then it follows from our assumptions that
. Then it follows from our assumptions that  is precisely the residue of
is precisely the residue of  modulo
modulo  . By Exercise 5.5-1, the polynomial
. By Exercise 5.5-1, the polynomial  is square-free precisely when
is square-free precisely when  , which is equivalent to
, which is equivalent to  . This amounts to saying that
. This amounts to saying that  does not divide the integer
does not divide the integer  .
.
Corollary 5.77 If  is a square-free polynomial with degree
is a square-free polynomial with degree  , then there is a prime
, then there is a prime  (that is, the absolute value of
(that is, the absolute value of  is polynomial in the bit size of
is polynomial in the bit size of  ) such that the polynomial
) such that the polynomial  is square-free in
is square-free in  .
.
Proof. By the Prime Number Theorem (Theorem 33.37), for large enough  , the product of the primes in the interval
, the product of the primes in the interval  is at least
is at least  .
.
Set  . If
. If  is large enough, then
is large enough, then

where  are primes not larger than
are primes not larger than  , and
, and  is the leading coefficient of
is the leading coefficient of  .
.
Let us suppose, for the primes  , that
, that  is not square-free in
is not square-free in  . Then the product
. Then the product  divides
divides  , and so
, and so

(In the last two inequalities, we used the Hadamard inequality, and the fact that  .) This contradicts to inequality (5.22), which must be valid because of the choice of
.) This contradicts to inequality (5.22), which must be valid because of the choice of  .
.
We note that using the Prime Number Theorem more carefully, one can obtain a stronger bound for  .
.
We present a general procedure that can be used to obtain, given a factorisation modulo a prime  , a factorisation modulo
, a factorisation modulo  of a polynomial with integer coefficients.
of a polynomial with integer coefficients.
Theorem 5.78 (Hensel's lemma) Suppose that  are polynomials with leading coefficient
are polynomials with leading coefficient  such that
such that  , and, in addition,
, and, in addition,  and
and  are relatively prime in
are relatively prime in  . Then, for an arbitrary positive integer
. Then, for an arbitrary positive integer  , there are polynomials
, there are polynomials  such that
such that
 both of the leading coefficients of
both of the leading coefficients of  and
and  are equal to
are equal to  ,
,

 and
and  ,
,

 .
.
Moreover, the polynomials  and
and  satisfying the conditions above are unique modulo
satisfying the conditions above are unique modulo  .
.
Proof. From the conditions concerning the leading coefficients, we obtain that  , and, further, that
, and, further, that  and
and  , provided the suitable polynomials
, provided the suitable polynomials  and
and  indeed exist. The existence is proved by induction on
indeed exist. The existence is proved by induction on  . In the initial step,
. In the initial step,  and the choice
and the choice  and
and  is as required.
is as required.
The induction step  : let us assume that there exist polynomials
: let us assume that there exist polynomials  and
and  that are well-defined modulo
that are well-defined modulo  and satisfy the conditions. If the polynomials
and satisfy the conditions. If the polynomials  and
and  exist, then they must satisfy the conditions imposed on
exist, then they must satisfy the conditions imposed on  and
and  . As
. As  and
and  are unique modulo
are unique modulo  , we may write
, we may write  and
and  where
where  and
and  are polynomials with integer coefficients. The condition concerning the leading coefficients guarantees that
are polynomials with integer coefficients. The condition concerning the leading coefficients guarantees that  and that
and that  .
.
By the induction hypothesis,  where
where  . The observations about the degrees of the polynomials
. The observations about the degrees of the polynomials  and
and  imply that the degree of
imply that the degree of  is smaller than
is smaller than  . Now we may compute that
. Now we may compute that

As  , the congruence above holds modulo
, the congruence above holds modulo  . Thus
. Thus  and
and  satisfy the conditions if and only if
satisfy the conditions if and only if

This, however, amounts to saying, after cancelling  from both sides, that
from both sides, that

Using the congruences  and
and  we obtain that this is equivalent to the congruence
we obtain that this is equivalent to the congruence

Considering the inequalities  and
and  and the fact that in
and the fact that in  the polynomials
the polynomials  and
and  are relatively prime, we find that equation (5.23) can be solved uniquely in
are relatively prime, we find that equation (5.23) can be solved uniquely in  . For, if
. For, if  and
and  form a solution to
form a solution to  , then, by Theorem 5.12, the polynomials
, then, by Theorem 5.12, the polynomials

and

form a solution of (5.23). The uniqueness of the solution follows from the bounds on the degrees, and from the fact that  and
and  relatively prime. The details of this are left to the reader.
relatively prime. The details of this are left to the reader.
Corollary 5.79 Assume that  , and the polynomials
, and the polynomials  satisfy the conditions of Hensel's lemma. Set
satisfy the conditions of Hensel's lemma. Set  and let
and let  be a positive integer. Then the polynomials
be a positive integer. Then the polynomials  and
and  can be obtained using
can be obtained using  arithmetic operations modulo
arithmetic operations modulo  .
.
Proof. The proof of Theorem 5.78 suggests the following algorithm.
Hensel-Lifting(
)
1is a solution, in
, of
2
3
FOR
TO4
DO5
reduced modulo
(in
) 6
reduced modulo
(in
) 7
(in
) 8
RETURN
The polynomials  and
and  can be obtained using
can be obtained using  operations in
operations in  (see Theorem 5.12 and the remark following it). An iteration
(see Theorem 5.12 and the remark following it). An iteration  consists of a constant number of operations with polynomials, and the cost of one run of the main loop is
consists of a constant number of operations with polynomials, and the cost of one run of the main loop is  operations (modulo
operations (modulo  and
and  ). The total cost of reaching
). The total cost of reaching  is
is  operations.
operations.
The factorisation problem (5.18) was efficiently reduced to the case in which the polynomial  has integer coefficients and leading coefficient 1. We may also assume that
has integer coefficients and leading coefficient 1. We may also assume that  has no multiple factors in
has no multiple factors in  . Indeed, in our case
. Indeed, in our case  , and so the possible multiple factors of
, and so the possible multiple factors of  can be separated using the idea that we already used over finite fields as follows. By Lemma 5.13, the polynomial
can be separated using the idea that we already used over finite fields as follows. By Lemma 5.13, the polynomial  is already square-free, and, using Lemma 5.14, it suffices to find its factors with multiplicity one. From Proposition 5.71, we can see that
is already square-free, and, using Lemma 5.14, it suffices to find its factors with multiplicity one. From Proposition 5.71, we can see that  has integer coefficients and leading coefficient 1. Computing the
greatest common divisor and dividing polynomials can be performed
efficiently, and so the reduction can be carried out in polynomial
time. (In the computation of the greatest common divisor, the
intermediate expression swell can be avoided using the techniques used
in number theory.)
has integer coefficients and leading coefficient 1. Computing the
greatest common divisor and dividing polynomials can be performed
efficiently, and so the reduction can be carried out in polynomial
time. (In the computation of the greatest common divisor, the
intermediate expression swell can be avoided using the techniques used
in number theory.)
In the sequel we assume that the polynomial
we want to factor is square-free, its coefficients are integers, and its leading coefficient is 1.
The fundamental idea of the Berlekamp-Zassenhaus algorithm is that we compute the irreducible factors of  modulo
modulo  where
where  is a suitably chosen prime and
is a suitably chosen prime and  is large enough. If, for instance,
is large enough. If, for instance,  , and we have already computed the coefficients of a factor modulo
, and we have already computed the coefficients of a factor modulo  , then, by Mignotte's theorem, we can obtain the coefficients of a factor in
, then, by Mignotte's theorem, we can obtain the coefficients of a factor in  .
.
From now on, we will also assume that  is a prime such that the polynomial
is a prime such that the polynomial  is square-free in
is square-free in  . Using linear search such a prime
. Using linear search such a prime  can be found in polynomial time (Corollary 5.77). One can even assume that
can be found in polynomial time (Corollary 5.77). One can even assume that  is polynomial in the bit size of
is polynomial in the bit size of  .
.
The irreducible factors in  of the polynomial
of the polynomial  can be found using Berlekamp's deterministic method (Theorem 5.42). Let
can be found using Berlekamp's deterministic method (Theorem 5.42). Let  be polynomials, all with leading coefficient 1, such that the
be polynomials, all with leading coefficient 1, such that the  are the irreducible factors of the polynomial
are the irreducible factors of the polynomial  in
in  .
.
Using the technique of Hensel's lemma (Theorem 5.78) and Corollary 5.79, the system  can be lifted modulo
can be lifted modulo  . To simplify the notation, we assume now that
. To simplify the notation, we assume now that  are polynomials with leading coefficients 1 such that
are polynomials with leading coefficients 1 such that

and the  are the irreducible factors of the polynomial
are the irreducible factors of the polynomial  in
in  .
.
Let  be an irreducible factor with leading coefficient 1 of the polynomial
be an irreducible factor with leading coefficient 1 of the polynomial  in
in  . Then there is a uniquely determined set
. Then there is a uniquely determined set  for which
for which

Let  be the smallest integer such that
be the smallest integer such that  . Mignotte's bound shows that the polynomial
. Mignotte's bound shows that the polynomial  on the right-hand side, if its coefficients are represented by the residues with the smallest absolute values, coincides with
on the right-hand side, if its coefficients are represented by the residues with the smallest absolute values, coincides with  .
.
We found that determining the irreducible factors of  is equivalent to finding minimal subsets
is equivalent to finding minimal subsets  for which there is a polynomial
for which there is a polynomial  with leading coefficient 1 such that
with leading coefficient 1 such that  , the absolute values of the coefficients of
, the absolute values of the coefficients of  are at most
are at most  , and, moreover,
, and, moreover,  divides
divides  . This can be checked by examining at most
. This can be checked by examining at most  sets
sets  . The cost of examining a single
. The cost of examining a single  is polynomial in the size of
is polynomial in the size of  .
.
To summarise, we obtained the following method to factor, in  , a square-free polynomial
, a square-free polynomial  with integer coefficients and leading coefficient 1.
with integer coefficients and leading coefficient 1.
Berlekamp-Zassenhaus(
)
1a prime
such that
is square-free in
and
2
the irreducible factors of
in
(using Berlekamp's deterministic method) 3
4
the Hensel lifting of the system
modulo
5
the collection of minimal subsets
of
such that
reduced modulo
divides
6
RETURN
Theorem 5.80 Let  be a square-free polynomial with integer coefficients and leading coefficient
be a square-free polynomial with integer coefficients and leading coefficient  , and let
, and let  be a prime number such that the polynomial
be a prime number such that the polynomial  is square-free in
is square-free in  and
and  . Then the irreducible factors of the polynomial
. Then the irreducible factors of the polynomial  in
in  can be obtained by the Berlekamp-Zassenhaus algorithm. The cost of this algorithm is polynomial in
can be obtained by the Berlekamp-Zassenhaus algorithm. The cost of this algorithm is polynomial in  ,
,  and
and  where
where  is the number of irreducible factors of the polynomial
is the number of irreducible factors of the polynomial  in
in  .
.
Example 5.5 (Swinnerton-Dyer polynomials) Let

where  are the first
are the first  prime numbers, and the product is taken over all possible
prime numbers, and the product is taken over all possible  combinations of the signs
combinations of the signs  and
and  . The degree of
. The degree of  is
is  , and one can show that it is irreducible in
, and one can show that it is irreducible in  . On the other hand, for all primes
. On the other hand, for all primes  , the polynomial
, the polynomial  is the product of factors with degree at most 2. Therefore these
polynomials represent hard cases for the Berlekamp-Zassenhaus
algorithm, as we need to examine about
is the product of factors with degree at most 2. Therefore these
polynomials represent hard cases for the Berlekamp-Zassenhaus
algorithm, as we need to examine about  sets
sets  to find out that
to find out that  is irreducible.
is irreducible.
Our goal in this section is to present the Lenstra-Lenstra-Lovász algorithm (LLL algorithm) for factoring polynomials  . This was the first polynomial time method for solving the polynomial factorisation problem over
. This was the first polynomial time method for solving the polynomial factorisation problem over  . Similarly to the Berlekamp-Zassenhaus method, the LLL algorithm starts with a factorisation of
. Similarly to the Berlekamp-Zassenhaus method, the LLL algorithm starts with a factorisation of  modulo
modulo  and then uses Hensel lifting. In the final stages of the work, it uses lattice reduction to find a proper divisor of
and then uses Hensel lifting. In the final stages of the work, it uses lattice reduction to find a proper divisor of  ,
provided one exists. The powerful idea of the LLL algorithm is that it
replaced the search, which may have exponential complexity, in the
Berlekamp-Zassenhaus algorithm by an efficient lattice reduction.
,
provided one exists. The powerful idea of the LLL algorithm is that it
replaced the search, which may have exponential complexity, in the
Berlekamp-Zassenhaus algorithm by an efficient lattice reduction.
Let  be a square-free polynomial with leading coefficient 1 such that
be a square-free polynomial with leading coefficient 1 such that  , and let
, and let  be a prime such that the polynomial
be a prime such that the polynomial  is square free in
is square free in  and
and  .
.
Lemma 5.81 Suppose that  where
where  and
and  are polynomials with integer coefficients and leading coefficient
are polynomials with integer coefficients and leading coefficient  . Let
. Let  with
with  and assume that
and assume that  for some polynomial
for some polynomial  such that
such that  has integer coefficients and
has integer coefficients and  . Let us further assume that
. Let us further assume that  . Then
. Then  in
in  .
.
Proof. Let  . By the assumptions,
. By the assumptions,

Suppose that  and
and  . (We know that
. (We know that  . If
. If  , then
, then  , and similarly, if
, and similarly, if  , then
, then  .) Rewriting the congruence, we obtain
.) Rewriting the congruence, we obtain

Considering the coefficient vectors of the polynomials  and
and  , this congruence amounts to saying that adding to the
, this congruence amounts to saying that adding to the  -th row of the Sylvester matrix (5.20) a suitable linear combination of the other rows results in a row in which all the elements are divisible by
-th row of the Sylvester matrix (5.20) a suitable linear combination of the other rows results in a row in which all the elements are divisible by  . Consequently,
. Consequently,  . The Hadamard inequality (Corollary 5.60) yields that
. The Hadamard inequality (Corollary 5.60) yields that  , but this can only happen if
, but this can only happen if  . However,
. However,  , and so, by (5.21),
, and so, by (5.21),  .
.
Set

Further, we let  be a polynomial with leading coefficient 1 such that
be a polynomial with leading coefficient 1 such that  is an irreducible factor of
is an irreducible factor of  . Set
. Set  . Define the set
. Define the set  as follows:
as follows:

Clearly,  is closed under addition of polynomials. We identify a polynomial with degree less than
is closed under addition of polynomials. We identify a polynomial with degree less than  with its coefficient vector of length
with its coefficient vector of length  . Under this identification,
. Under this identification,  becomes a lattice in
becomes a lattice in  . Indeed, it is not too hard to show (Exercise 5.5-2) that the polynomials
. Indeed, it is not too hard to show (Exercise 5.5-2) that the polynomials

or, more precisely, their coefficient vectors, form a basis of  .
.
Theorem 5.82 Let  be a polynomial with degree less than
be a polynomial with degree less than  such that the coefficient vector of
such that the coefficient vector of  is the first element in a Lovász-reduced basis of
is the first element in a Lovász-reduced basis of  . Then
. Then  is irreducible in
is irreducible in  if and only if
if and only if  .
.
Proof. As  , it is clear that
, it is clear that  whenever
whenever  is irreducible. In order to show the implication in the other direction, let us assume that
is irreducible. In order to show the implication in the other direction, let us assume that  is reducible and let
is reducible and let  be a proper divisor of
be a proper divisor of  such that
such that  is divisible by
is divisible by  in
in  . Using Hensel's lemma (Theorem 5.78), we conclude that
. Using Hensel's lemma (Theorem 5.78), we conclude that  is divisible by
is divisible by  , that is,
, that is,  . Mignotte's theorem (Theorem 5.74) shows that
. Mignotte's theorem (Theorem 5.74) shows that

Now, if we use the properties of reduced bases (second assertion of Theorem 5.67), then we obtain

and so

We can hence apply Lemma 5.81, which gives  .
.
Based on the previous theorem, the LLL algorithm can be outlined as
follows (we only give a version for factoring to two factors). The
input is a square-free polynomial  with integer coefficients and leading coefficient 1 such that
with integer coefficients and leading coefficient 1 such that  .
.
LLL-Polynomial-Factorisation(
)
1a prime
such that
is square-free in
and
2
an irreducible factor
in
(using Berlekamp's deterministic method) 3
IF4
THENRETURN“irreducible” 5ELSE6

Hensel-Lifting7
a basis of the lattice
in (5.24) 8
Lovász-Reduction9
10
IF11
THENRETURN12
ELSERETURN“irreducible”

Theorem 5.83 Using the LLL algorithm, the irreducible factors in  of a polynomial
of a polynomial  can be obtained deterministically in polynomial time.
can be obtained deterministically in polynomial time.
Proof. The
general factorisation problem, using the method introduced at the
discussion of the Berlekamp-Zassenhaus procedure, can be reduced to the
case in which the polynomial  is square-free and has leading coefficient 1. By the observations made
there, the steps in lines 1–7 can be performed in polynomial time. In
line 8, the Lovász reduction can be carried out efficiently (Corollary 5.65). In line 9, we may use a modular version of the Euclidean algorithm to avoid intermediate expression swell (see Chapter 6).
is square-free and has leading coefficient 1. By the observations made
there, the steps in lines 1–7 can be performed in polynomial time. In
line 8, the Lovász reduction can be carried out efficiently (Corollary 5.65). In line 9, we may use a modular version of the Euclidean algorithm to avoid intermediate expression swell (see Chapter 6).
The correctness of the method is asserted by Theorem 5.82. The LLL algorithm can be applied repeatedly to factor the polynomials in the output, in case they are not already irreducible.
One can show that the Hensel lifting costs  operations with moderately sized integers. The total cost of the version of the LLL algorithm above is
operations with moderately sized integers. The total cost of the version of the LLL algorithm above is  .
.
Exercises
5.5-1 Let  be a field and let
be a field and let  . The polynomial
. The polynomial  has no irreducible factors with multiplicity greater than one if and only if
has no irreducible factors with multiplicity greater than one if and only if  .
.
Hint. In one direction, one can use Lemma 5.13, and use Lemma 5.14 in the other.
5.5-2 Show that the polynomials

form a basis of the lattice in (5.24).
Hint. It suffices to show that the polynomials  (
( ) can be expressed with the given polynomials. To show this, divide
) can be expressed with the given polynomials. To show this, divide  by
by  and compute the remainder.
and compute the remainder.
PROBLEMS |
5-1 The trace in finite fields
Let  be finite fields. The definition of the trace map
be finite fields. The definition of the trace map  on
on  is as follows: if
is as follows: if  then
then

a. Show that the map  is
is  -linear and its image is precisely
-linear and its image is precisely  .
.
Hint. Use the fact that  is defined using a polynomial with degree
is defined using a polynomial with degree  to show that
to show that  is not identically zero.
is not identically zero.
b. Let  be a uniformly distributed random pair of elements from
be a uniformly distributed random pair of elements from  . Then the probability that
. Then the probability that  is
is  .
.
5-2 The Cantor-Zassenhaus algorithm for fields of characteristic 2
Let  and let
and let  be a polynomial of the form
be a polynomial of the form

where the  are pairwise relatively prime and irreducible polynomials with degree
are pairwise relatively prime and irreducible polynomials with degree  in
in  . Also assume that
. Also assume that  .
.
a. Let  be a uniformly distributed random polynomial with degree less than
be a uniformly distributed random polynomial with degree less than  . Then the greatest common divisor
. Then the greatest common divisor

is a proper divisor of  with probability at least
with probability at least  .
.
Hint. Apply the previous exercise taking  and
and  , and follow the argument in Theorem 5.38.
, and follow the argument in Theorem 5.38.
b. Using part (a), give a randomised polynomial time method for factoring a polynomial of the form (5.25) over  .
.
5-3 Divisors and zero divisors
Let  be a field. The ring
be a field. The ring  is said to be an
is said to be an  -algebra (in case
-algebra (in case  is clear from the context,
is clear from the context,  is simply called an algebra), if
is simply called an algebra), if  is a vector space over
is a vector space over  , and
, and  holds for all
holds for all  and
and  . It is easy to see that the rings
. It is easy to see that the rings  and
and  are
are  -algebras.
-algebras.
Let  be a finite-dimensional
be a finite-dimensional  -algebra. For an arbitrary
-algebra. For an arbitrary  , we may consider the map
, we may consider the map  defined as
defined as  for
for  . The map
. The map  is
is  -linear, and so we may speak about its minimal polynomial
-linear, and so we may speak about its minimal polynomial  , its characteristic polynomial
, its characteristic polynomial  , and its trace
, and its trace  . In fact, if
. In fact, if  is an ideal in
is an ideal in  , then
, then  is an invariant subspace of
is an invariant subspace of  , and so we can restrict
, and so we can restrict  to
to  , and we may consider the minimal polynomial, the characteristic polynomial, and the trace of the restriction.
, and we may consider the minimal polynomial, the characteristic polynomial, and the trace of the restriction.
a. Let  with
with  . Show that the residue class
. Show that the residue class  is a zero divisor in the ring
is a zero divisor in the ring  if and only if
if and only if  does not divide
does not divide  and
and  .
.
b. Let  be an algebra over
be an algebra over  , and let
, and let  be an element with minimal polynomial
be an element with minimal polynomial  . Show that if
. Show that if  is not irreducible over
is not irreducible over  , then
, then  contains a zero divisor. To be precise, if
contains a zero divisor. To be precise, if  is a non-trivial factorisation (
is a non-trivial factorisation ( ), then
), then  and
and  form a pair of zero divisors, that is, both of them are non-zero, but their product is zero.
form a pair of zero divisors, that is, both of them are non-zero, but their product is zero.
5-4 Factoring polynomials over algebraic number fields
a. Let  be a field with characteristic zero and let
be a field with characteristic zero and let  be a finite-dimensional
be a finite-dimensional  -algebra with an identity element. Let us assume that
-algebra with an identity element. Let us assume that  where
where  and
and  are non-zero
are non-zero  -algebras. Let
-algebras. Let  be a basis of
be a basis of  over
over  . Show that there is a
. Show that there is a  such that
such that  is not irreducible in
is not irreducible in  .
.
Hint. This exercise is for
readers who are familiar with the elements of linear algebra. Let us
assume that the minimal polynomial of  is the irreducible polynomial
is the irreducible polynomial  . Let
. Let  be the characteristic polynomial of
be the characteristic polynomial of  on the invariant subspace
on the invariant subspace  (for
(for  ). Here
). Here  and
and  are the sets of elements of the form
are the sets of elements of the form  and
and  , respectively where
, respectively where  . Because of our conditions, we can find suitable exponents
. Because of our conditions, we can find suitable exponents  such that
such that  . This implies that the trace
. This implies that the trace  of the map
of the map  on the subspace
on the subspace  is
is  . Set
. Set  . Obviously,
. Obviously,  , which gives
, which gives  . If the assertion of the exercise is false, then the latter equation holds for all
. If the assertion of the exercise is false, then the latter equation holds for all  , and so, as the trace is linear, it holds for all
, and so, as the trace is linear, it holds for all  . This, however, leads to a contradiction: if
. This, however, leads to a contradiction: if  (1 denotes the unity in
(1 denotes the unity in  ), then clearly
), then clearly  and
and  .
.
b. Let  be an algebraic number field, that is, a field of the form
be an algebraic number field, that is, a field of the form  where
where  , and there is an irreducible polynomial
, and there is an irreducible polynomial  such that
such that  . Let
. Let  be a square-free polynomial and set
be a square-free polynomial and set  . Show that
. Show that  is a finite-dimensional algebra over
is a finite-dimensional algebra over  . More precisely, if
. More precisely, if  and
and  , then the elements of the form
, then the elements of the form  (
( ,
,  ) form a basis over
) form a basis over  .
.
c. Show that if  is reducible over
is reducible over  , then there are
, then there are  -algebras
-algebras  such that
such that  .
.
Hint. Use the Chinese remainder theorem .
d. Consider the polynomial  above and suppose that a field
above and suppose that a field  and a polynomial
and a polynomial  are given. Assume, further, that
are given. Assume, further, that  is square-free and is not irreducible over
is square-free and is not irreducible over  . The polynomial
. The polynomial  can be factored to the product of two non-constant polynomials in polynomial time.
can be factored to the product of two non-constant polynomials in polynomial time.
Hint. By the previous remarks, the minimal polynomial  over
over  of at least one of the elements
of at least one of the elements  (
( ,
,  ) is not irreducible in
) is not irreducible in  . Using the LLL algorithm,
. Using the LLL algorithm,  can be factored efficiently in
can be factored efficiently in  . From a factorisation of
. From a factorisation of  , a zero divisor of
, a zero divisor of  can be obtained, and this can be used to find a proper divisor of
can be obtained, and this can be used to find a proper divisor of  in
in  .
.
CHAPTER NOTES |
The abstract algebraic concepts discussed in this chapter can be found in many textbooks; see, for instance, Hungerford's book [120].
The theory of finite fields and the related algorithms are the theme of the excellent books by Lidl and Niederreiter [163] and Shparlinski [237].
Our main algorithmic topics, namely the factorisation of polynomials and lattice reduction are thoroughly treated in the book by von zur Gathen and Gerhard [83]. We recommend the same book to the readers who are interested in the efficient methods to solve the basic problems concerning polynomials. Theorem 8.23 of that book estimates the cost of multiplying polynomials by the Schönhage-Strassen method, while Corollary 11.6 is concerned with the cost of the asymptotically fast implementation of the Euclidean algorithm. Ajtai's result about shortest lattice vectors was published in [8].
The method by Kaltofen and Shoup is a randomised algorithm for
factoring polynomials over finite fields, and currently it has one of
the best time bounds among the known algorithms. The expected number of
 -operations in this algorithm is
-operations in this algorithm is  where
where  .
Further competitive methods were suggested by von zur Gathen and Shoup,
and also by Huang and Pan. The number of operations required by the
latter is
.
Further competitive methods were suggested by von zur Gathen and Shoup,
and also by Huang and Pan. The number of operations required by the
latter is  , if
, if  . Among the deterministic methods, the one by von zur Gathen and Shoup is the current champion. Its cost is
. Among the deterministic methods, the one by von zur Gathen and Shoup is the current champion. Its cost is  operations in
operations in  where
where  . An important related problem is constructing the field
. An important related problem is constructing the field  . The fastest randomised method is by Shoup. Its cost is
. The fastest randomised method is by Shoup. Its cost is  . For finding a square-free factorisation, Yun gave an algorithm that requires
. For finding a square-free factorisation, Yun gave an algorithm that requires  field operations in
field operations in  .
.
The best methods to solve the problem of lattice reduction and that
of factoring polynomials over the rationals use modular and numerical
techniques. After slightly modifying the definition of reduced bases,
an algorithm using  bit operations
for the former problem was presented by Storjohann. (We use the
original definition introduced in the paper by Lenstra, Lenstra and
Lovász [161].) We also mention Schönhage's method using
bit operations
for the former problem was presented by Storjohann. (We use the
original definition introduced in the paper by Lenstra, Lenstra and
Lovász [161].) We also mention Schönhage's method using  bit operations for factoring polynomials with integer coefficients (
bit operations for factoring polynomials with integer coefficients ( is the length of the coefficients).
is the length of the coefficients).
Besides factoring polynomials with rational coefficients, lattice reduction can also be used to solve lots of other problems: to break knapsack cryptosystems and random number generators based on linear congruences, simultaneous Diophantine approximation, to find integer linear dependencies among real numbers (this problem plays an important role in experiments that attempt to find mathematical identities). These and other related problems are discussed in the book [83].
A further exciting application area is the numerical solution of Diophantine equations. One can read about these developments in in the books by Smart [245] and Gaál [79]. The difficulty of finding a shortest lattice vector was verified in Ajtai's paper [8].
Finally we remark that the practical implementations of the polynomial methods involving lattice reduction are not competitive with the implementations of the Berlekamp-Zassenhaus algorithm, which, in the worst case, has exponential complexity. Nevertheless, the basis reduction performs very well in practice: in fact it is usually much faster than its theoretically proven speed. For some of the problems in the application areas listed above, we do not have another useful method.
The work of the authors was supported in part by grants NK72845 and T77476 of the Hungarian Scientific Research Fund.
Table of Contents
Computer systems performing various mathematical computations are inevitable in modern science and technology. We are able to compute the orbits of planets and stars, command nuclear reactors, describe and model many of the natural forces. These computations can be numerical and symbolical.
Although numerical computations may involve not only elementary arithmetical operations (addition, subtraction, multiplication, division) but also more sophisticated calculations, like computing numerical values of mathematical functions, finding roots of polynomials or computing numerical eigenvalues of matrices, these operations can only be carried out on numbers. Furthermore, in most cases these numbers are not exact. Their degree of precision depends on the floating-point arithmetic of the given computer hardware architecture.
Unlike numerical calculations, symbolic and algebraic computations operate on symbols that represent mathematical objects. These objects may be numbers such as integers, rational numbers, real and complex numbers, but may also be polynomials, rational and trigonometric functions, equations, algebraic structures such as groups, rings, ideals, algebras or elements of them, or even sets, lists, tables.
Computer systems with the ability to handle symbolic computations are called computer algebra systems or symbolic and algebraic systems or formula manipulation systems. In most cases, these systems are able to handle both numerical and graphical computations. The word “symbolic” emphasises that, during the problem-solving procedure, the objects are represented by symbols, and the adjective “algebraic” refers to the algebraic origin of the operations on these symbolic objects.
To characterise the notion “computer algebra”, one can describe it as a collection of computer programs developed basically to perform
-
exact representations of mathematical objects and
-
arithmetic with these objects.
On the other hand, computer algebra can be viewed as a discipline which has been developed in order to invent, analyse and implement efficient mathematical algorithms based on exact arithmetic for scientific research and applications.
Since computer algebra systems are able to perform error-free computations with arbitrary precision, first we have to clarify the data structures assigned to the various objects. Subsection 6.1 deals with the problems of representing mathematical objects. Furthermore, we describe the symbolic algorithms which are indispensable in modern science and practice.
The problems of natural sciences are mainly expressed in terms of mathematical equations. Research in solving symbolic linear systems is based on the well-known elimination methods. To find the solutions of non-linear systems, first we analyse different versions of the Euclidean algorithm and the method of resultants. In the mid-sixties of the last century, Bruno Buchberger presented a method in his PhD thesis for solving multivariate polynomial equations of arbitrary degree. This method is known as the Gröbner basis method. At that time , the mathematical community paid little attention to his work, but since then it became the basis of a powerful set of tools for computing with higher degree polynomial equations. This topic is discussed in Subsections 6.2 and 6.3.
The next area to be introduced is the field of symbolic integration. Although the nature of the problem was understood long ago (Liouville's principle), it was only in  that Robert Risch invented an algorithm to solve the following: given an elementary function
that Robert Risch invented an algorithm to solve the following: given an elementary function  of a real variable
of a real variable  , decide whether the indefinite integral
, decide whether the indefinite integral  is also an elementary function, and if so, compute the integral. We describe the method in Subsection 6.4.
is also an elementary function, and if so, compute the integral. We describe the method in Subsection 6.4.
At the end of this section, we offer a brief survey of the theoretical and practical relations of symbolic algorithms in Subsection 6.5, devoting an independent part to the present computer algebra systems.
In computer algebra, one encounters mathematical objects of different kinds. In order to be able to manipulate these objects on a computer, one first has to represent and store them in the memory of that computer. This can cause several theoretical and practical difficulties. We examine these questions in this subsection.
Consider the integers. We
know from our studies that the set of integers is countable, but
computers can only store finitely many of them. The range of values for
such a single-precision integer is limited by the number of distinct encodings that can be made in the computer word, which is typically  or
or  bits in length. Hence, one cannot directly use the computer's integers
to represent the mathematical integers, but must be prepared to write
programs to handle “arbitrarily” large integers represented by several
computer integers. The term arbitrarily large does not mean infinitely
large since some architectural constraints or the memory size limits in
any case. Moreover, one has to construct data structures over which
efficient operations can be built. In fact, there are two standard ways
of performing such a representation.
bits in length. Hence, one cannot directly use the computer's integers
to represent the mathematical integers, but must be prepared to write
programs to handle “arbitrarily” large integers represented by several
computer integers. The term arbitrarily large does not mean infinitely
large since some architectural constraints or the memory size limits in
any case. Moreover, one has to construct data structures over which
efficient operations can be built. In fact, there are two standard ways
of performing such a representation.
-
Radix notation (a generalisation of conventional decimal notation), in which
 is represented as
is represented as  , where the digits
, where the digits  are single precision integers. These integers can be chosen from the canonical digit set
are single precision integers. These integers can be chosen from the canonical digit set  or from the symmetrical digit set
or from the symmetrical digit set  , where base
, where base  can be, in principle, any positive integer greater than
can be, in principle, any positive integer greater than  . For efficiency,
. For efficiency,  is chosen so that
is chosen so that  is representable in a single computer word. The length
is representable in a single computer word. The length  of the linear list
of the linear list  used to represent a multiprecision integer
may be dynamic (i.e. chosen approximately for the particular integer
being represented) or static (i.e. pre-specified fixed length),
depending on whether the linear list is implemented using linked list
allocation or using array (sequential) notation. The sign of
used to represent a multiprecision integer
may be dynamic (i.e. chosen approximately for the particular integer
being represented) or static (i.e. pre-specified fixed length),
depending on whether the linear list is implemented using linked list
allocation or using array (sequential) notation. The sign of  is stored within the list, possibly as the sign of
is stored within the list, possibly as the sign of  or one or more of the other entries.
or one or more of the other entries. -
Modular notation, in which
 is represented by its value modulo a sufficient number of large (but
representable in one computer word) primes. From the images one can
reconstruct
is represented by its value modulo a sufficient number of large (but
representable in one computer word) primes. From the images one can
reconstruct  using the Chinese remainder algorithm.
using the Chinese remainder algorithm.
The modular form is fast for addition, subtraction and multiplication but is much slower for divisibility tasks. Hence, the choice of representation influences the algorithms that will be chosen. Indeed, not only the choice of representation influences the algorithms to be used but also the algorithms influence the choice of representation.
Example 6.1 For
the sake of simplicity, in the next example we work only with natural
numbers. Suppose that we have a computer architecture with machine word
 bits in length, i.e. our computer is able to perform integer arithmetic with the integers in range
bits in length, i.e. our computer is able to perform integer arithmetic with the integers in range  .
Using this arithmetic, we carry out a new arithmetic by which we are
able to perform integer arithmetic with the integers in range
.
Using this arithmetic, we carry out a new arithmetic by which we are
able to perform integer arithmetic with the integers in range  .
.
Using radix representation let  , and let
, and let

Then,
where the sum and the product were computed using radix notation.
Switching to modular representation we have to choose pairwise relatively prime integers from the interval  such that their product is greater than
such that their product is greater than  . Let, for example, the primes be
. Let, for example, the primes be

where  . Then, an integer from the interval
. Then, an integer from the interval  can be represented by a
can be represented by a  -tuple from the interval
-tuple from the interval  . Therefore,
. Therefore,

furthermore,  . Hence
. Hence

where addition and multiplication were carried out using modular arithmetic.
More generally, concerning the choice of representation of other mathematical objects, it is worth distinguishing three levels of abstraction:
-
Object level. This is the level where the objects are considered as formal mathematical objects. For example
 ,
,  and
and  are all representations of the integer
are all representations of the integer  . On the object level, the polynomials
. On the object level, the polynomials  and
and  are considered equal.
are considered equal. -
Form level. On this level, one has to distinguish between different representations of an object. For example
 and
and  are considered different representations of the same polynomial, namely the former is a product, a latter is a sum.
are considered different representations of the same polynomial, namely the former is a product, a latter is a sum. -
Data structure level. On this level, one has to consider different ways of representing an object in a computer memory. For example, we distinguish between representations of the polynomial
 as
as -
an array
 ,
, -
a linked list
 .
.
-
In order to represent objects in a computer algebra system, one has to make choices on both the form and the data structure level. Clearly, various representations are possible for many objects. The problem of “how to represent an object” becomes even more difficult when one takes into consideration other criteria, such as memory space, computation time, or readability. Let us see an example. For the polynomial

the product form is more comprehensive, but the second one is more suitable to know the coefficient of, say,  . Two other illustrative examples are
. Two other illustrative examples are
-
 and
and  ,
, -
 and
and  .
.
It is very hard to find any good strategy to represent mathematical objects satisfying several criteria. In practice, one object may have several different representations. This, however, gives rise to the problem of detecting equality when different representations of the same object are encountered. In addition, one has to be able to convert a given representation to others and simplify the representations.
Consider the integers. In the form level, one can represent the integers using base  representation, while at the data structure level they can be represented by a linked list or as an array.
representation, while at the data structure level they can be represented by a linked list or as an array.
Rational numbers can be represented by two integers, a numerator and a denominator. Considering memory constraints, one needs to ensure that rational numbers are in lowest terms and also that the denominator is positive (although other choices, such as positive numerator, are also possible). This implies that a greatest common divisor computation has to be performed. Since the ring of integers is a Euclidean domain, this can be easily computed using the Euclidean algorithm. The uniqueness of the representation follows from the choice of the denominator's sign.
Multivariate polynomials (elements of  , where
, where  is an integral domain) can be represented in the form
is an integral domain) can be represented in the form  , where
, where  and for
and for  , one can write
, one can write  for
for  . In the form level, one can consider the following levels of abstraction:
. In the form level, one can consider the following levels of abstraction:
-
Expanded or factored representation, where the products are multiplied out or the expression is in product form. Compare
-
 , and
, and -
 .
.
-
-
Recursive or distributive representation (only for multivariate polynomials). In the bivariate case, the polynomial
 can be viewed as an element of the domain
can be viewed as an element of the domain  ,
,  or
or  . Compare
. Compare -
 ,
, -
 , and
, and -
 .
.
-
At the data structure level, there can be dense or sparse
representation. Either all terms are considered, or only those having
non-zero coefficients. Compare  and
and  . In practice, multivariate polynomials are represented mainly in the sparse way.
. In practice, multivariate polynomials are represented mainly in the sparse way.
The traditional approach of representing power series of the form  is to truncate at some specified point, and then to regard them as
univariate polynomials. However, this is not a real representation,
since many power series can have the same representation. To overcome
this disadvantage, there exists a technique of representing power
series by a procedure generating all coefficients (rather than by any
finite list of coefficients). The generating function is a computable
function
is to truncate at some specified point, and then to regard them as
univariate polynomials. However, this is not a real representation,
since many power series can have the same representation. To overcome
this disadvantage, there exists a technique of representing power
series by a procedure generating all coefficients (rather than by any
finite list of coefficients). The generating function is a computable
function  such that
such that  .
To perform an operation with power series, it is enough to know how to
compute the coefficients of the resulting series from the coefficients
of the operands. For example, the coefficients
.
To perform an operation with power series, it is enough to know how to
compute the coefficients of the resulting series from the coefficients
of the operands. For example, the coefficients  of the product of the power series
of the product of the power series  and
and  can be computed as
can be computed as  . In that way, the coefficients are computed when they are needed. This technique is called lazy evaluation.
. In that way, the coefficients are computed when they are needed. This technique is called lazy evaluation.
Since computer algebra programs compute in a symbolic way with arbitrary accuracy, in addition to examining time complexity of the algorithms it is also important to examine their space complexity.
Footnote. We consider the running time as the number of operations executed, according to the RAM-model. Considering the Turing-machine model, and using machine words with constant length, we do not have this problem, since in this case space is always bounded by the time.
Consider the simple problem of solving a linear system having  equations an
equations an  unknowns with integer coefficients which require
unknowns with integer coefficients which require  computer word of storage. Using Gaussian elimination, it is easy to see
that each coefficient of the reduced linear system may need
computer word of storage. Using Gaussian elimination, it is easy to see
that each coefficient of the reduced linear system may need  computer words of storage. In other words, Gaussian elimination suffers
from exponential growth in the size of the coefficients. Note that if
we applied the same method to linear systems having polynomial
coefficients, we would have exponential growth both in the size of the
numerical coefficients of the polynomials and in the degrees of the
polynomials themselves. In spite of the observed exponential growth,
the final result of the Gaussian elimination will always be of
reasonable size because by Cramer's rule we know that each component of
the solution to such a linear system is a ratio of two determinants,
each of which requires approximately
computer words of storage. In other words, Gaussian elimination suffers
from exponential growth in the size of the coefficients. Note that if
we applied the same method to linear systems having polynomial
coefficients, we would have exponential growth both in the size of the
numerical coefficients of the polynomials and in the degrees of the
polynomials themselves. In spite of the observed exponential growth,
the final result of the Gaussian elimination will always be of
reasonable size because by Cramer's rule we know that each component of
the solution to such a linear system is a ratio of two determinants,
each of which requires approximately  computer words. The phenomenon described above is called intermediate expression swell. This often appears in computer algebra algorithms.
computer words. The phenomenon described above is called intermediate expression swell. This often appears in computer algebra algorithms.
Example 6.2 Using only integer arithmetic we solve the following system of linear equations:
First, we eliminate variable  from the second equation. We multiply the first row by
from the second equation. We multiply the first row by  , the second by
, the second by  and take their sum. If we apply this strategy for the third equation to eliminate variable
and take their sum. If we apply this strategy for the third equation to eliminate variable  , we get the following system.
, we get the following system.
Now, we eliminate variable  multiplying the second equation by
multiplying the second equation by  , the third one by
, the third one by  , then taking their sum. The result is
, then taking their sum. The result is
Continuing this process of eliminating variables, we get the following system:
After some simplification, we get that  . If we apply greatest common divisor computations in each elimination step, the coefficient growth will be less drastic.
. If we apply greatest common divisor computations in each elimination step, the coefficient growth will be less drastic.
In order to avoid the intermediate expression swell phenomenon, one
uses modular techniques. Instead of performing the operations in the
base structure  (e.g. Euclidean ring), they are performed in some factor structure, and then, the result is transformed back to
(e.g. Euclidean ring), they are performed in some factor structure, and then, the result is transformed back to  (Figure 6.1).
In general, modular computations can be performed efficiently, and the
reconstruction steps can be made with some interpolation strategy.
(Figure 6.1).
In general, modular computations can be performed efficiently, and the
reconstruction steps can be made with some interpolation strategy.
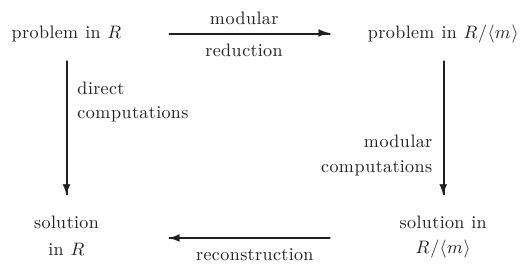
Let  be an integral domain and let
be an integral domain and let


be arbitrary polynomials with  . Let us give a necessary and sufficient condition for
. Let us give a necessary and sufficient condition for  and
and  sharing a common root in
sharing a common root in  .
.
If  is a field, then
is a field, then  is a Euclidean domain. Recall that we call an integral domain
is a Euclidean domain. Recall that we call an integral domain  Euclidean together with the function
Euclidean together with the function  if for all
if for all  , there exist
, there exist  such that
such that  , where
, where  or
or  ; furthermore, for all
; furthermore, for all  , we have
, we have  . The element
. The element  is called the quotient and
is called the quotient and  is called the remainder.
If we are working in a Euclidean domain, we would like the greatest
common divisor to be unique. For this, a unique element has to be
chosen from each equivalence class obtained by multiplying by the units
of the ring
is called the remainder.
If we are working in a Euclidean domain, we would like the greatest
common divisor to be unique. For this, a unique element has to be
chosen from each equivalence class obtained by multiplying by the units
of the ring  . (For example, in case of integers we always choose the non-negative one from the classes
. (For example, in case of integers we always choose the non-negative one from the classes  ) Thus, every element
) Thus, every element  has a unique form
has a unique form

where  is called the normal form of
is called the normal form of  . Let us consider a Euclidean domain
. Let us consider a Euclidean domain  over a field
over a field  . Let the normal form of
. Let the normal form of  be the corresponding normalised monic polynomial, that is,
be the corresponding normalised monic polynomial, that is,  , where
, where  denotes the leading coefficient of polynomial
denotes the leading coefficient of polynomial  . Let us summarise these important cases:
. Let us summarise these important cases:
-
If
 then
then  and
and  ,
, -
if
 (
( is a field) then
is a field) then  (the leading coefficient of polynomial
(the leading coefficient of polynomial  with the convention
with the convention  ),
),  and
and  .
.
The following algorithm computes the greatest common divisor of two arbitrary elements of a Euclidean domain. Note that this is one of the most ancient algorithms of the world, already known by Euclid around 300 B.C.
Classical-Euclidean(
)
12
3
WHILE4
DO5
6
7
RETURN
In the ring of integers, the remainder in line 4 becomes  . When
. When  , where
, where  is a field, the remainder in line 4 can be calculated by the algorithm
is a field, the remainder in line 4 can be calculated by the algorithm Euclidean-Division-Univariate-Polynomials(
), the analysis of which is left to Exercise 6.2-1.
Figure 6.2 shows the operation of the Classical-Euclidean algorithm in  and
and  . Note that in
. Note that in  the program only enters the while loop with non-negative numbers and the remainder is always non-negative, so the normalisation in line 7 is not needed.
the program only enters the while loop with non-negative numbers and the remainder is always non-negative, so the normalisation in line 7 is not needed.
Before examining the running time of the Classical-Euclidean algorithm, we deal with an extended version of it.
Extended-Euclidean(
)
12
3
WHILE4
DO5
6
7
8
9
10
RETURN
Figure 6.2. Illustration of the operation of the Classical-Euclidean algorithm in and . In case (a), the input is . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines and is executed four times, values , and in these iterations are shown in the table. The Classical-Euclidean(, ) algorithm outputs as result. In case (b), the input parameters are . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial .
![Illustration of the operation of the Classical-Euclidean algorithm in \mathbb{Z} and \mathbb{Q}[x] . In case (a), the input is a=-18,b=30,a,b\in\mathbb{Z} . The first two lines of the pseudocode compute the absolute values of the input numbers. The loop between lines 3 and 6 is executed four times, values r , c and d in these iterations are shown in the table. The Classical-Euclidean(-18 , 30 ) algorithm outputs 6 as result. In case (b), the input parameters are a=12x^{4}-68x^{3}+52x^{2}-92x+56,b=-12x^{3}+80x^{2}-84x+24\in\mathbb{Q}[x] . The first two lines compute the normal form of the polynomials, and the while loop is executed three times. The output of the algorithm is the polynomial \textrm{normal}(c)=x-2/3 .](VOLUME1_KONV-Firefox_elemei/kleuk.png)
It is known that in the Euclidean domain  , the greatest common divisor of elements
, the greatest common divisor of elements  can be expressed in the form
can be expressed in the form  with appropriate elements
with appropriate elements  . However, this pair
. However, this pair  is not unique. For if
is not unique. For if  are appropriate, then so are
are appropriate, then so are  and
and  for all
for all  :
:

The Classical-Euclidean algorithm is completed in a way that beside the greatest common divisor it outputs an appropriate pair  as discussed above.
as discussed above.
Let  , where
, where  is a Euclidean domain together with the function
is a Euclidean domain together with the function  . The equations
. The equations

are obviously fulfilled due to the initialisation in the first two lines of the pseudocode Extended-Euclidean. We show that equations (6.3) are invariant under the transformations of the while loop of the pseudocode. Let us presume that the conditions (6.3) are fulfilled before an iteration of the loop. Then lines 4–5 of the pseudocode imply

hence, because of lines 6–7,

Lines 8–9 perform the following operations:  take the values of
take the values of  and
and  , then
, then  take the values of
take the values of  and
and  , while
, while  takes the value of
takes the value of  and
and  . Thus, the equalities in (6.3) are also fulfilled after the iteration of the while loop. Since
. Thus, the equalities in (6.3) are also fulfilled after the iteration of the while loop. Since  in each iteration of the loop, the series
in each iteration of the loop, the series  obtained in lines 8–9 is a strictly decreasing series of natural numbers, so sooner or later the control steps out of the while loop. The greatest common divisor is the last non-zero remainder in the series of Euclidean divisions, that is,
obtained in lines 8–9 is a strictly decreasing series of natural numbers, so sooner or later the control steps out of the while loop. The greatest common divisor is the last non-zero remainder in the series of Euclidean divisions, that is,  in lines 8–9.
in lines 8–9.
Example 6.3 Let us examine the series of remainders in the case of polynomials


The values of the variables  before the execution of line
before the execution of line  are
are
The return values are:
We can see that the size of the coefficients show a drastic growth. One might ask why we do not normalise in every iteration of the while loop? This idea leads to the normalised version of the Euclidean algorithm for polynomials.
Extended-Euclidean-Normalised(
)
12
3
4
5
WHILE6
DO7
8
9
10
11
12
13
14
RETURN
Example 6.4 Let us look at the series of remainders and series  obtained in the
obtained in the Extended-Euclidean-Normalised algorithm in case of the polynomials (6.4) and (6.5)
Before the execution of line  of the pseudocode, the values of the variables
of the pseudocode, the values of the variables  are
are
Looking at the size of the coefficients in,  the advantage of the normalised version is obvious, but we could still
not avoid the growth. To get a machine architecture-dependent
description and analysis of the
the advantage of the normalised version is obvious, but we could still
not avoid the growth. To get a machine architecture-dependent
description and analysis of the Extended-Euclidean-Normalised algorithm, we introduce the following notation. Let
where  is the word length of the computer in bits. It is easy to verify that if
is the word length of the computer in bits. It is easy to verify that if  and
and  , then
, then
We give the following theorems without proof.
Theorem 6.1 If  and
and  , then the
, then the Classical-Euclidean and Extended-Euclidean algorithms require  machine-word arithmetic operations.
machine-word arithmetic operations.
Theorem 6.2 If  is a field and
is a field and  , then the
, then the Classical-Euclidean, Extended-Euclidean and Extended-Euclidean-Normalised algorithms require  elementary operations in
elementary operations in  .
.
Can the growth of the coefficients be due to the choice of our polynomials? Let us examine a single Euclidean division in the Extended-Euclidean-Normalised algorithm. Let  , where
, where
and  are monic polynomials,
are monic polynomials,  ,
,  ,
,  , and consider the case
, and consider the case  . Then
. Then

Note that the bound (6.6) is valid for the coefficients of the remainder polynomial  as well, that is,
as well, that is,  . So in case
. So in case  ,
the size of the coefficients may only grow by a factor of around three
in each Euclidean division. This estimate seems accurate for
pseudorandom polynomials, the interested reader should look at Problem 6-1. The worst case estimate suggests that
,
the size of the coefficients may only grow by a factor of around three
in each Euclidean division. This estimate seems accurate for
pseudorandom polynomials, the interested reader should look at Problem 6-1. The worst case estimate suggests that

where  denotes the running time of the
denotes the running time of the Extended-Euclidean-Normalised algorithm, practically, the number of times the while
loop is executed. Luckily, this exponential growth is not achieved in
each iteration of the loop, and altogether the growth of the
coefficients is bounded polynomially in terms of the input. Later we
will see that the growth can be eliminated using modular techniques.
Summarising: after computing the greatest common divisor of the polynomials  (
( is a field),
is a field),  and
and  have a common root if and only if their greatest common divisor is not a constant. For if
have a common root if and only if their greatest common divisor is not a constant. For if  is not a constant, then the roots of
is not a constant, then the roots of  are also roots of
are also roots of  and
and  , since
, since  divides
divides  and
and  . On the other hand, if
. On the other hand, if  and
and  have a root in common, then their greatest common divisor cannot be a constant, since the common root is also a root of it.
have a root in common, then their greatest common divisor cannot be a constant, since the common root is also a root of it.
If  is a
UFD (unique factorisation domain, where every non-zero, non-unit
element can be written as a product of irreducible elements in a unique
way up to reordering and multiplication by units) but not necessarily a
Euclidean domain then, the situation is more complicated, since we may
not have a Euclidean algorithm in
is a
UFD (unique factorisation domain, where every non-zero, non-unit
element can be written as a product of irreducible elements in a unique
way up to reordering and multiplication by units) but not necessarily a
Euclidean domain then, the situation is more complicated, since we may
not have a Euclidean algorithm in  . Luckily, there are several useful methods due to: (1) unique factorisation in
. Luckily, there are several useful methods due to: (1) unique factorisation in  , (2) the existence of a greatest common divisor of two or more arbitrary elements.
, (2) the existence of a greatest common divisor of two or more arbitrary elements.
The first possible method is to perform the calculations in the field of fractions of  . The polynomial
. The polynomial  is called a primitive polynomial if there is no prime in
is called a primitive polynomial if there is no prime in  that divides all coefficients of
that divides all coefficients of  .
A famous lemma by Gauss says that the product of primitive polynomials
is also primitive, hence, for the primitive polynomials
.
A famous lemma by Gauss says that the product of primitive polynomials
is also primitive, hence, for the primitive polynomials  ,
,  if and only if
if and only if  , where
, where  denotes the field of fractions of
denotes the field of fractions of  . So we can calculate greatest common divisors in
. So we can calculate greatest common divisors in  instead of
instead of  . Unfortunately, this approach is not really effective because arithmetic in the field of fractions
. Unfortunately, this approach is not really effective because arithmetic in the field of fractions  is much more expensive than in
is much more expensive than in  .
.
A second possibility is an algorithm similar to the Euclidean
algorithm: in the ring of polynomials in one variable over an integral
domain, a so-called pseudo-division can be defined. Using the polynomials (6.1), (6.2), if  , then there exist
, then there exist  , such that
, such that

where  or
or  . The polynomial
. The polynomial  is called the pseudo-quotient of
is called the pseudo-quotient of  and
and  and
and  is called the pseudo-remainder. The notation is
is called the pseudo-remainder. The notation is  .
.


Then  .
.
On the other hand, each polynomial  can be written in a unique form
can be written in a unique form

up to a unit factor, where  and
and  are primitive polynomials. In this case,
are primitive polynomials. In this case,  is called the content,
is called the content,  is called the primitive part of
is called the primitive part of  .
The uniqueness of the form can be achieved by the normalisation of
units. For example, in the case of integers, we always choose the
positive ones from the equivalence classes of
.
The uniqueness of the form can be achieved by the normalisation of
units. For example, in the case of integers, we always choose the
positive ones from the equivalence classes of  .
.
The following algorithm performs a series of pseudo-divisions. The algorithm uses the function  , which computes the pseudo-remainder, and it assumes that we can calculate greatest common divisors in
, which computes the pseudo-remainder, and it assumes that we can calculate greatest common divisors in  , contents and primitive parts in
, contents and primitive parts in  . The input is
. The input is  , where
, where  is a UFD. The output is the polynomial
is a UFD. The output is the polynomial  .
.
Primitive-Euclidean(
)
12
3
WHILE4
DO5
6
7
8
9
RETURN
The operation of the algorithm is illustrated by Figure 6.3. The running time of the Primitive-Euclidean algorithm is the same as the running time of the previous versions of the Euclidean algorithm.
Figure 6.3. The illustration of the operation of the Primitive-Euclidean algorithm with input . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines and is executed three times, the table shows the values of , and in the iterations. In line , variable equals . The Primitive-Euclidean() algorithm returns as result.
![The illustration of the operation of the Primitive-Euclidean algorithm with input a(x)=12x^{4}-68x^{3}+52x^{2}-92x+56,\ b(x)=-12x^{3}+80x^{2}-84x+24\in\mathbb{Z}[x] . The first two lines of the program compute the primitive parts of the polynomials. The loop between lines 3 and 6 is executed three times, the table shows the values of r , c and d in the iterations. In line 7 , variable \gamma equals \textrm{gcd}(4,4)=4 . The Primitive-Euclidean(a,b ) algorithm returns 4\cdot(3x-2) as result.](VOLUME1_KONV-Firefox_elemei/preuk.png)
The Primitive-Euclidean algorithm is very important because the ring  of multivariate polynomials is a UFD, so we apply the algorithm recursively, e.g. in
of multivariate polynomials is a UFD, so we apply the algorithm recursively, e.g. in  , using computations in the UFDs
, using computations in the UFDs  . In other words, the recursive view of multivariate polynomial rings leads to the recursive application of the
. In other words, the recursive view of multivariate polynomial rings leads to the recursive application of the Primitive-Euclidean algorithm in a straightforward way.
We may note that, like above, the algorithm shows a growth in the coefficients.
Let us take a detailed look at the UFD  .
The bound on the size of the coefficients of the greatest common
divisor is given by the following theorem, which we state without
proof.
.
The bound on the size of the coefficients of the greatest common
divisor is given by the following theorem, which we state without
proof.
Theorem 6.3 (Landau-Mignotte) Let  ,
,  ,
,  and
and  . Then
. Then
Corollary 6.4 With the notations of the previous theorem, the absolute value of any coefficient of the polynomial  is smaller than
is smaller than

Proof. The greatest common divisor of  and
and  obviously divides both
obviously divides both  and
and  ,
and its degree is at most the minimum of their degrees. Furthermore,
the leading coefficient of the greatest common divisor divides
,
and its degree is at most the minimum of their degrees. Furthermore,
the leading coefficient of the greatest common divisor divides  and
and  , so it also divides
, so it also divides  .
.
Example 6.6 Corollary 6.4 implies that the absolute value of the coefficients of the greatest common divisor is at most  for the polynomials (6.4), (6.5), and at most
for the polynomials (6.4), (6.5), and at most  for the polynomials (6.7) and (6.8).
for the polynomials (6.7) and (6.8).
The following method describes the necessary and sufficient conditions for the common roots of (6.1) and (6.2) in the most general context. As a further advantage, it can be applied to solve algebraic equation systems of higher degree.
Let  be an integral domain and
be an integral domain and  its field of fractions. Let us consider the smallest extension
its field of fractions. Let us consider the smallest extension  of
of  over which both
over which both  of (6.1) and
of (6.1) and  of (6.2) splits into linear factors. Let us denote the roots (in
of (6.2) splits into linear factors. Let us denote the roots (in  ) of the polynomial
) of the polynomial  by
by  , and the roots of
, and the roots of  by
by  . Let us form the following product:
. Let us form the following product:
It is obvious that  equals to
equals to  if and only if
if and only if  for some
for some  and
and  , that is,
, that is,  and
and  have a common root. The product
have a common root. The product  is called the resultant of the polynomials
is called the resultant of the polynomials  and
and  . Note that the value of the resultant depends on the order of
. Note that the value of the resultant depends on the order of  and
and  , but the resultants obtained in the two ways can only differ in sign.
, but the resultants obtained in the two ways can only differ in sign.
Evidently, this form of the resultant cannot be applied in practice, since it presumes that the roots are known. Let us examine the different forms of the resultant. Since

hence,
Thus,
Although it looks a lot more friendly, this form still requires the roots of at least one polynomial. Next we examine how the resultant may be expressed only in terms of the coefficients of the polynomials. This leads to the Sylvester form of the resultant.
Let us presume that polynomial  in (6.1) and polynomial
in (6.1) and polynomial  in (6.2) have a common root. This means that there exists a number
in (6.2) have a common root. This means that there exists a number  such that
such that

Multiply these equations by the numbers  , and
, and  , respectively. We get
, respectively. We get  equations from the first one and
equations from the first one and  from the second one. Consider these
from the second one. Consider these  equations as a homogeneous system of linear equations in
equations as a homogeneous system of linear equations in  indeterminates. This system has the obviously non-trivial solution
indeterminates. This system has the obviously non-trivial solution  .
It is a well-known fact that a homogeneous system with as many
equations as indeterminates has non-trivial solutions if and only if
its determinant is zero. We get that
.
It is a well-known fact that a homogeneous system with as many
equations as indeterminates has non-trivial solutions if and only if
its determinant is zero. We get that  and
and  can only have common roots if the determinant
can only have common roots if the determinant
equals to  (there are 0s everywhere outside the dotted areas). Thus, a necessary
condition for the existence of common roots is that the determinant
(there are 0s everywhere outside the dotted areas). Thus, a necessary
condition for the existence of common roots is that the determinant  of order
of order  is 0. Below we prove that
is 0. Below we prove that  equals to the resultant of
equals to the resultant of  and
and  , hence,
, hence,  is also a sufficient condition for common roots. The determinant (6.9) is called the Sylvester form of the resultant.
is also a sufficient condition for common roots. The determinant (6.9) is called the Sylvester form of the resultant.
Theorem 6.5 Using the above notation
Proof. We will precede by induction on  . If
. If  , then
, then  , so the right-hand side is
, so the right-hand side is  . The left-hand side is a determinant of order
. The left-hand side is a determinant of order  with
with  everywhere in the diagonal, and 0 everywhere else. Thus,
everywhere in the diagonal, and 0 everywhere else. Thus,  , so the statement is true. In the following, presume that
, so the statement is true. In the following, presume that  and the statement is true for
and the statement is true for  . If we take the polynomial
. If we take the polynomial

instead of  , then
, then  and
and  fulfil the condition:
fulfil the condition:
Since  , the coefficients of
, the coefficients of  and
and  satisfy
satisfy

Thus,
We transform the determinant in the following way: add  times the first column to the second column, then add
times the first column to the second column, then add  times the new second column to the third column, etc. This way the
times the new second column to the third column, etc. This way the  -s disappear from the first
-s disappear from the first  lines, so the first
lines, so the first  lines of
lines of  and the transformed
and the transformed  are identical. In the last
are identical. In the last  rows, subtract
rows, subtract  times the second one from the first one, and similarly, always subtract
times the second one from the first one, and similarly, always subtract  times a row from the row right above it. In the end,
times a row from the row right above it. In the end,  becomes
becomes
Using the last row for expansion, we get  , which implies
, which implies  by the induction hypothesis.
by the induction hypothesis.
We get that  , that is, polynomials
, that is, polynomials  and
and  have a common root in
have a common root in  if and only if determinant
if and only if determinant  vanishes.
vanishes.
From an algorithmic point of view, the computation of the resultant in Sylvester form for higher degree polynomials means the computation of a large determinant. The following theorem implies that pseudo-division may simplify the computation.
Theorem 6.6 For the polynomials  of (6.1) and
of (6.1) and  of (6.2), in case of
of (6.2), in case of 

Proof. Multiply the first line of the determinant (6.9) by  . Let
. Let  and
and  be the uniquely determined polynomials with
be the uniquely determined polynomials with

where  . Then multiplying row
. Then multiplying row  of the resultant by
of the resultant by  , row
, row  by
by  etc., and subtracting them from the first row we get the determinant
etc., and subtracting them from the first row we get the determinant
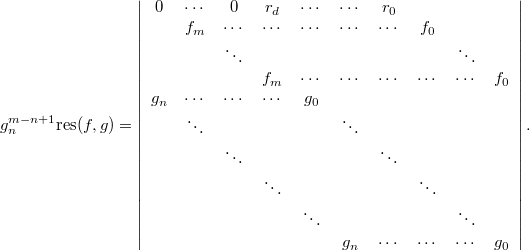
Here  is in the
is in the  th column of the first row, and
th column of the first row, and  is in the
is in the  th column of the first row.
th column of the first row.
Similarly, multiply the second row by  , then multiply rows
, then multiply rows  by
by  etc., and subtract them from the second row. Continue the same way for the third,
etc., and subtract them from the second row. Continue the same way for the third,  th row. The result is
th row. The result is
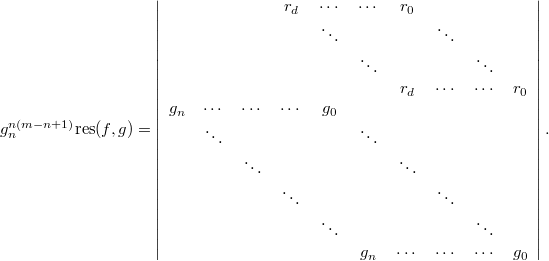
After reordering the rows
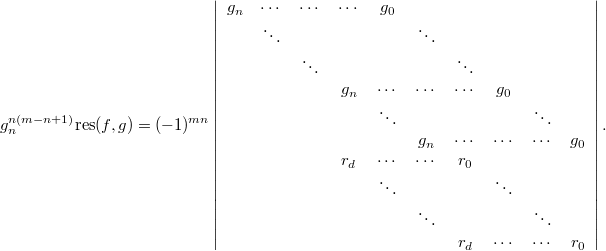
Note that
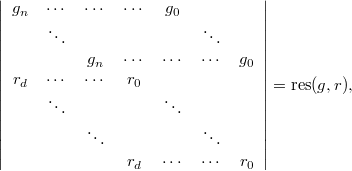
thus,

and therefore

Equation (6.10) describes an important relationship. Instead of computing the possibly gigantic determinant  , we perform a series of pseudo-divisions and apply (6.10)
in each step. We calculate the resultant only when no more
pseudo-division can be done. An important consequence of the theorem is
the following corollary.
, we perform a series of pseudo-divisions and apply (6.10)
in each step. We calculate the resultant only when no more
pseudo-division can be done. An important consequence of the theorem is
the following corollary.
Corollary 6.7 There exist polynomials  such that
such that  , with
, with  ,
,  .
.
Proof. Multiply the  th column of the determinant form of the resultant by
th column of the determinant form of the resultant by  and add it to the last column for
and add it to the last column for  . Then
. Then
Using the last column for expansion and factoring  and
and  , we get the statement with the restrictions on the degrees.
, we get the statement with the restrictions on the degrees.
The most important benefit of the resultant method, compared to the previously discussed methods, is that the input polynomials may contain symbolic coefficients as well.

Then the existence of common rational roots of  and
and  cannot be decided by variants of the Euclidean algorithm, but we can
decide it with the resultant method. Such a root exists if and only if
cannot be decided by variants of the Euclidean algorithm, but we can
decide it with the resultant method. Such a root exists if and only if

that is, when  or
or  .
.
The significance of the resultant is not only that we can decide the existence of common roots of polynomials, but also that using it we can reduce the solution of algebraic equation systems to solving univariate equations.


Consider polynomials  and
and  as elements of
as elements of  . They have a common root if and only if
. They have a common root if and only if

Common roots in  can exist for
can exist for  . For each
. For each  , we substitute into equations (6.11) and (6.12) (already in
, we substitute into equations (6.11) and (6.12) (already in  ) and get that the integer solutions are
) and get that the integer solutions are  .
.
We note that the resultant method can also be applied to solve
polynomial equations in several variables, but it is not really
effective. One problem is that computational space explosion occurs in
the computation of the determinant. Note that computing the resultant
of two univariate polynomials in determinant form using the usual
Gauss-elimination requires  operations, while the variants of the Euclidean algorithm are
quadratic. The other problem is that computational complexity depends
strongly on the order of the indeterminates. Eliminating all variables together in a polynomial equation system is much more effective. This leads to the introduction of multivariate resultants.
operations, while the variants of the Euclidean algorithm are
quadratic. The other problem is that computational complexity depends
strongly on the order of the indeterminates. Eliminating all variables together in a polynomial equation system is much more effective. This leads to the introduction of multivariate resultants.
All methods considered so far for the existence and calculation of
common roots of polynomials are characterised by an explosion of
computational space. The natural question arises: can we apply modular
techniques? Below we examine the case  with
with  . Let us consider the polynomials (6.4), (6.5)
. Let us consider the polynomials (6.4), (6.5)  and let
and let  a prime number. Then the series of remainders in
a prime number. Then the series of remainders in  in the
in the Classical-Euclidean algorithm is
We get that polynomials  and
and  are relatively prime in
are relatively prime in  . The following theorem describes the connection between greatest common divisors in
. The following theorem describes the connection between greatest common divisors in  and
and  .
.
Theorem 6.8 Let  . Let
. Let  be a prime such that
be a prime such that  and
and  . Let furthermore
. Let furthermore  ,
,  ,
,  and
and  . Then
. Then
(1)  ,
,
(2) if  , then
, then  .
.
Proof. (1): Since  and
and  , thus
, thus  . So
. So

By the hypothesis  , which implies
, which implies

(2): Since  and
and  is non-trivial,
is non-trivial,

If  , then the right-hand side of (6.13) is non-trivial, thus
, then the right-hand side of (6.13) is non-trivial, thus  . But the resultant is the sum of the corresponding products of the coefficients, so
. But the resultant is the sum of the corresponding products of the coefficients, so  , contradiction.
, contradiction.
Corollary 6.9 There are at most a finite number of primes  such that
such that  ,
,  and
and  .
.
In case statement (1) of Theorem 6.8 is fulfilled, we call  a “lucky prime'”. We can outline a modular algorithm for the computation of the gcd.
a “lucky prime'”. We can outline a modular algorithm for the computation of the gcd.
Modular-Gcd-Bigprime(
)
1the Landau-Mignotte constant (from Corollary 6.4) 2
3
WHILETRUE4DOa prime with
,
,
and
5
6
IFand
7
THENRETURN8
ELSE
The first line of the algorithm requires the calculation of the
Landau-Mignotte bound. The fourth line requires a “sufficiently large”
prime  which does not divide the leading coefficient of
which does not divide the leading coefficient of  and
and  . The fifth line computes the greatest common divisor of polynomials
. The fifth line computes the greatest common divisor of polynomials  and
and  modulo
modulo  (for example with the
(for example with the Classical-Euclidean algorithm in  ). We store the coefficients of the resulting polynomials with symmetrical representation. The sixth line examines whether
). We store the coefficients of the resulting polynomials with symmetrical representation. The sixth line examines whether  and
and  are fulfilled, in which case
are fulfilled, in which case  is the required greatest common divisor. If this is not the case, then
is the required greatest common divisor. If this is not the case, then  is an “unlucky prime”, so we choose another prime. Since, by Theorem 6.8,
there are only finitely many “unlucky primes”, the algorithm eventually
terminates. If the primes are chosen according to a given strategy, set
is an “unlucky prime”, so we choose another prime. Since, by Theorem 6.8,
there are only finitely many “unlucky primes”, the algorithm eventually
terminates. If the primes are chosen according to a given strategy, set
 is not needed.
is not needed.
The disadvantage of the Modular-gcd-bigprime
algorithm is that the Landau-Mignotte constant grows exponentially in
terms of the degree of the input polynomials, so we have to work with
large primes. The question is how we could modify the algorithm so that
we can work with “many small primes”. Since the greatest common divisor
in  is only unique up to a constant factor, we have to be careful with the
coefficients of the polynomials in the new algorithm. So, before
applying the Chinese remainder theorem for the coefficients of the
modular greatest common divisors taken modulo different primes, we have
to normalise the leading coefficient of
is only unique up to a constant factor, we have to be careful with the
coefficients of the polynomials in the new algorithm. So, before
applying the Chinese remainder theorem for the coefficients of the
modular greatest common divisors taken modulo different primes, we have
to normalise the leading coefficient of  . If
. If  and
and  are the leading coefficients of
are the leading coefficients of  and
and  , then the leading coefficient of
, then the leading coefficient of  divides
divides  . Therefore, we normalise the leading coefficient of
. Therefore, we normalise the leading coefficient of  to
to  in case of primitive polynomials
in case of primitive polynomials  and
and  ; and finally take the primitive part of the resulting polynomial. Just like in the
; and finally take the primitive part of the resulting polynomial. Just like in the Modular-gcd-bigprime
algorithm, modular values are stored with symmetrical representation.
These observations lead to the following modular gcd algorithm using
small primes.
Modular-Gcd-Smallprimes(
)
12
a prime such that
3
4
5
6
7
8
WHILEtrue9DOIF10
THENIF11
THENRETURN12
13
IF14
THEN15
IFand
16
THENRETURN17
a prime such that
and
18
19
20
21
IF22
THEN23
IF24
THENIF25
THEN
Coeff-build()26IF27
THEN28
ELSE29
30


Coeff-Build(
)
12
3
FOR
DOWNTO4
DO5
6
7
RETURN
We may note that the algorithm Modular-Gcd-Smallprimes does not require as many small primes as the Landau-Mignotte bound tells us. When the value of polynomial  does not change during a few iterations, we test in lines 13–16 if
does not change during a few iterations, we test in lines 13–16 if  is a greatest common divisor. The number of these iterations is stored in the variable
is a greatest common divisor. The number of these iterations is stored in the variable  of line six. Note that the value of
of line six. Note that the value of  could vary according to the input polynomial. The primes used in the
algorithms could preferably be chosen from an (architecture-dependent)
prestored list containing primes that fit in a machine word, so the use
of set
could vary according to the input polynomial. The primes used in the
algorithms could preferably be chosen from an (architecture-dependent)
prestored list containing primes that fit in a machine word, so the use
of set  becomes unnecessary. Corollary 6.9 implies that the
becomes unnecessary. Corollary 6.9 implies that the Modular-Gcd-Smallprimes algorithm always terminates.
The Coeff-Build algorithm computes the solution of the equation system obtained by taking congruence relations modulo  and
and  for the coefficients of identical degree in the input polynomials
for the coefficients of identical degree in the input polynomials  and
and  .
This is done according to the Chinese remainder theorem. It is very
important to store the results in symmetrical modular representation
form.
.
This is done according to the Chinese remainder theorem. It is very
important to store the results in symmetrical modular representation
form.
Example 6.9 Let us examine the operation of the Modular-Gcd-Smallprimes algorithm for the previously seen polynomials (6.4), (6.5). For simplicity, we calculate with small primes. Recall that

After the execution of the first six lines of the algorithm with  , we have
, we have  and
and  . Since
. Since  due to line 7, lines 10–12 are executed. Polynomial
due to line 7, lines 10–12 are executed. Polynomial  is not zero, so
is not zero, so  , and
, and  will be the values after the execution. The condition in line 13 is not fulfilled, so we choose another prime,
will be the values after the execution. The condition in line 13 is not fulfilled, so we choose another prime,  is a bad choice, but
is a bad choice, but  is allowed. According to lines 19–20,
is allowed. According to lines 19–20,  ,
,  . Since
. Since  , we have
, we have  and lines 25–30 are not executed. Polynomial
and lines 25–30 are not executed. Polynomial  is constant, so the return value in line 11 is 1, which means that polynomials
is constant, so the return value in line 11 is 1, which means that polynomials  and
and  are relatively prime.
are relatively prime.
Example 6.10 In our second example, consider the already discussed polynomials

Let again  . After the first six lines of the polynomials
. After the first six lines of the polynomials  . After the execution of lines 10–12, we have
. After the execution of lines 10–12, we have  . Let the next prime be
. Let the next prime be  . So the new values are
. So the new values are  . Since
. Since  ,
,  and the new value of
and the new value of  is
is  after lines 25–30. The value of the variable
after lines 25–30. The value of the variable  is still 1. Let the next prime be 11. Then
is still 1. Let the next prime be 11. Then  . Polynomials
. Polynomials  and
and  have the same degree, so we modify the coefficients of
have the same degree, so we modify the coefficients of  . Then
. Then  and since
and since  , we get
, we get  and
and  . Let the new prime be 13. Then
. Let the new prime be 13. Then  . The degrees of
. The degrees of  and
and  are still equal, thus lines 25–30 are executed and the variables become
are still equal, thus lines 25–30 are executed and the variables become  .After the execution of lines 17–18, it turns out that
.After the execution of lines 17–18, it turns out that  and
and  , so
, so  is the greatest common divisor.
is the greatest common divisor.
We give the following theorem without proof.
Theorem 6.10 The Modular-Gcd-Smallprimes algorithm works correctly. The computational complexity of the algorithm is  machine word operations, where
machine word operations, where  , and
, and  is the Landau-Mignotte bound for polynomials
is the Landau-Mignotte bound for polynomials  and
and  .
.
Exercises
6.2-1 Let  be a commutative ring with identity element,
be a commutative ring with identity element,  ,
,  , furthermore,
, furthermore,  a unit,
a unit,  . The following algorithm performs Euclidean division for
. The following algorithm performs Euclidean division for  and
and  and outputs polynomials
and outputs polynomials  for which
for which  and
and  or
or  holds.
holds.
Euclidean-Division-Univariate-Polynomials(
)
12
FOR
DOWNTO3
DOIF4
THEN5
6
ELSE7
and
8
RETURN
Prove that the algorithm uses at most

operations in  .
.
6.2-2 What is the difference between the algorithms Extended-Euclidean and Extended-Euclidean-Normalised in  ?
?
6.2-3 Prove that  .
.
6.2-4 The discriminant of polynomial  (
( ,
,  ) is the element
) is the element

where  denotes the derivative of
denotes the derivative of  with respect to
with respect to  . Polynomial
. Polynomial  has a multiple root if and only if its discriminant is 0. Compute
has a multiple root if and only if its discriminant is 0. Compute  for general polynomials of second and third degree.
for general polynomials of second and third degree.
Let  be a field and
be a field and  be a multivariate polynomial ring in
be a multivariate polynomial ring in  variables over
variables over  . Let
. Let  . First we determine a necessary and sufficient condition for the polynomials
. First we determine a necessary and sufficient condition for the polynomials  having common roots in
having common roots in  . We can see that the problem is a generalisation of the case
. We can see that the problem is a generalisation of the case  from the previous subsection. Let
from the previous subsection. Let
denote the ideal generated by polynomials  . Then the polynomials
. Then the polynomials  form a basis of ideal
form a basis of ideal  . The variety of an ideal
. The variety of an ideal  is the set
is the set

The knowledge of the variety  means that we also know the common roots of
means that we also know the common roots of  . The most important questions about the variety and ideal
. The most important questions about the variety and ideal  are as follows.
are as follows.
-

-
How “big” is
 ?
? -
Given
 , in which case is
, in which case is  ?
? -
 ?
?
Fortunately, in a special basis of ideal  , in the so-called Gröbner basis, these questions are easy to answer. First let us study the case
, in the so-called Gröbner basis, these questions are easy to answer. First let us study the case  . Since
. Since  is a Euclidean ring,
is a Euclidean ring,

We may assume that  . Let
. Let  and divide
and divide  by
by  with remainder. Then there exist unique polynomials
with remainder. Then there exist unique polynomials  with
with  and
and  . Hence,
. Hence,

Moreover,  if
if  are the distinct linear factors of
are the distinct linear factors of  . Unfortunately, equality (6.14)
is not true in case of two or more variables. Indeed, a multivariate
polynomial ring over an arbitrary field is not necessary Euclidean,
therefore we have to find a new interpretation of division with
remainder. We proceed in this direction.
. Unfortunately, equality (6.14)
is not true in case of two or more variables. Indeed, a multivariate
polynomial ring over an arbitrary field is not necessary Euclidean,
therefore we have to find a new interpretation of division with
remainder. We proceed in this direction.
Recall that a partial order  is a total order (or simply order) if either
is a total order (or simply order) if either  or
or  for all
for all  . The total order `
. The total order `  `
`  is allowable if
is allowable if
(i)  for all
for all  ,
,
(ii)  for all
for all  .
.
It is easy to prove that any allowable order on  is a well-order (namely, every nonempty subset of
is a well-order (namely, every nonempty subset of  has a least element). With the notation already adopted consider the set
has a least element). With the notation already adopted consider the set

The elements of  are called monomials. Observe that
are called monomials. Observe that  is closed under multiplication in
is closed under multiplication in  , constituting a commutative monoid. The map
, constituting a commutative monoid. The map  ,
,  is an isomorphism, therefore, for an allowable total order
is an isomorphism, therefore, for an allowable total order  on
on  , we have that
, we have that
(i)  for all
for all  ,
,
(ii) 
The allowable orders on  are called monomial orders. If
are called monomial orders. If  ,
the natural order is a monomial order, and the corresponding univariate
monomials are ordered by their degree. Let us see some standard
examples of higher degree monomial orders. Let
,
the natural order is a monomial order, and the corresponding univariate
monomials are ordered by their degree. Let us see some standard
examples of higher degree monomial orders. Let

where the variables are ordered as  .
.
-
Pure lexicographic order.

 and
and  .
. -
Graded lexicographic order.
 or (
or ( and
and  ).
). -
Graded reverse lexicographic order.
 or (
or ( and
and  and
and  ).
).
The proof that these orders are monomial orders is left as an exercise. Observe that if  , then
, then  . The graded reverse lexicographic order is often called a total degree order and it is denoted by
. The graded reverse lexicographic order is often called a total degree order and it is denoted by  .
.
Example 6.11 Let  and let
and let  . Then
. Then
Let  and again,
and again,  . Then
. Then
Let a monomial order  be given. Furthermore, we identify the vector
be given. Furthermore, we identify the vector  with the monomial
with the monomial  . Let
. Let  be a non-zero polynomial,
be a non-zero polynomial,  . Then
. Then  are the terms of polynomial
are the terms of polynomial  ,
,  is the multidegree of the polynomial (where the maximum is with respect to the monomial order),
is the multidegree of the polynomial (where the maximum is with respect to the monomial order),  is the leading coefficient of
is the leading coefficient of  ,
,  is the leading monomial of
is the leading monomial of  , and
, and  is the leading term of
is the leading term of  . Let
. Let  and
and  .
.
Example 6.12 Consider the polynomial  . Let
. Let  and
and  . Then
. Then

If  and
and  , then
, then

In this subsection, our aim is to give an algorithm for division with remainder in  . Given multivariate polynomials
. Given multivariate polynomials  and monomial order
and monomial order  , we want to compute the polynomials
, we want to compute the polynomials  and
and  such that
such that  and no monomial in
and no monomial in  is divisible by any of
is divisible by any of  .
.
Multivariate-Division-with-Remainder(
)
12
3
FOR
TO4
DO5
WHILE6
DOIFdivides
for some
7
THENchoose such anand
8
9
ELSE10
11
RETURNand

The correctness of the algorithm follows from the fact that in every iteration of the while cycle of lines 5–10, the following invariants hold
(i)  and
and  ,
,
(ii)  for all
for all  ,
,
(iii) no monomial in  is divisible by any
is divisible by any  .
.
The algorithm has a weakness, namely, the multivariate division with
remainder is not deterministic. In line 7, we can choose arbitrarily
from the appropriate values of  .
.
Example 6.13 Let  ,
,  ,
,  , the monomial order
, the monomial order  ,
,  , and in line 7, we always choose the smallest possible
, and in line 7, we always choose the smallest possible  . Then the result of the algorithm is
. Then the result of the algorithm is  ,
,  ,
,  . But if we change the order of the functions
. But if we change the order of the functions  and
and  (that is,
(that is,  and
and  ), then the output of the algorithm is
), then the output of the algorithm is  ,
,  and
and  .
.
As we have seen in the previous example, we can make the algorithm deterministic by always choosing the smallest possible  in line
in line  . In this case, the quotients
. In this case, the quotients  and the remainder
and the remainder  are unique, which we can express as
are unique, which we can express as  .
.
Observe that if  , then the algorithm gives the answer to the ideal membership problem:
, then the algorithm gives the answer to the ideal membership problem:  if and only if the remainder is zero. Unfortunately, if
if and only if the remainder is zero. Unfortunately, if  , then this is not true anymore. For example, with the monomial order
, then this is not true anymore. For example, with the monomial order 

and the quotients are  ,
,  . On the other hand,
. On the other hand,  , which shows that
, which shows that  .
.
Our next goal is to find a special basis for an arbitrary polynomial ideal such that the remainder on division by that basis is unique, which gives the answer to the ideal membership problem. But does such a basis exist at all? And if it does, is it finite?
The ideal  is a monomial ideal if there exists a subset
is a monomial ideal if there exists a subset  such that
such that

that is, ideal  is generated by monomials.
is generated by monomials.
Lemma 6.11 Let  be a monomial ideal, and
be a monomial ideal, and  . Then
. Then

Proof. The  direction is obvious. Conversely, let
direction is obvious. Conversely, let  and
and  such that
such that  . Then the sum has at least one member
. Then the sum has at least one member  which contains
which contains  , therefore
, therefore  .
.
The most important consequence of the lemma is that two monomial ideals are identical if and only if they contain the same monomials.
Lemma 6.12 (Dickson's lemma) Every monomial ideal is finitely generated, namely, for every  , there exists a finite subset
, there exists a finite subset  such that
such that  .
.
Lemma 6.13 Let  be an ideal in
be an ideal in  . If
. If  is a finite subset such that
is a finite subset such that  , then
, then  .
.
Proof. Let  . If
. If  is an arbitrary polynomial, then division with remainder gives
is an arbitrary polynomial, then division with remainder gives  , with
, with  , such that either
, such that either  or no term of
or no term of  is divisible by the leading term of any
is divisible by the leading term of any  . But
. But  , hence,
, hence,  . This, together with Lemma (6.11), implies that
. This, together with Lemma (6.11), implies that  , therefore
, therefore  .
.
Together with Dickson's lemma applied to  , and the fact that the zero polynomial generates the zero ideal, we obtain the following famous result.
, and the fact that the zero polynomial generates the zero ideal, we obtain the following famous result.
Theorem 6.14 (Hilbert's basis theorem) Every ideal  is finitely generated, namely, there exists a finite subset
is finitely generated, namely, there exists a finite subset  such that
such that  and
and  .
.
Corollary 6.15 (ascending chain condition) Let  be an ascending chain of ideals in
be an ascending chain of ideals in  . Then there exists an
. Then there exists an  such that
such that  .
.
Proof. Let  . Then
. Then  is an ideal, which is finitely generated by Hilbert's basis theorem. Let
is an ideal, which is finitely generated by Hilbert's basis theorem. Let  . With
. With  , we have
, we have  .
.
A ring satisfying the ascending chain condition is called Noetherian. Specifically, if  is a field, then
is a field, then  is Noetherian.
is Noetherian.
Let  be a monomial order on
be a monomial order on  and
and  an ideal. A finite set
an ideal. A finite set  is a Gröbner basis of ideal
is a Gröbner basis of ideal  with respect to
with respect to  if
if  . Hilbert's basis theorem implies the following corollary
. Hilbert's basis theorem implies the following corollary
Corollary 6.16 Every ideal  in
in  has a Gröbner basis.
has a Gröbner basis.
It is easy to show that the remainder on division by the Gröbner basis  does not depend on the order of the elements of G. Therefore, we can use the notation
does not depend on the order of the elements of G. Therefore, we can use the notation  . Using the Gröbner basis, we can easily answer the ideal membership problem.
. Using the Gröbner basis, we can easily answer the ideal membership problem.
Theorem 6.17 Let  be a Gröbner basis of ideal
be a Gröbner basis of ideal  with respect to a monomial order
with respect to a monomial order  and let
and let  . Then
. Then  .
.
Proof. We prove that there exists a unique  such that (1)
such that (1)  , (2) no term of
, (2) no term of  is divisible by any monomial of
is divisible by any monomial of  . The existence of such an
. The existence of such an  comes from division with remainder. For the uniqueness, let
comes from division with remainder. For the uniqueness, let  for arbitrary
for arbitrary  and suppose that no term of
and suppose that no term of  or
or  is divisible by any monomial of
is divisible by any monomial of  . Then
. Then  , and by Lemma 6.11,
, and by Lemma 6.11,  is divisible by
is divisible by  for some
for some  . This means that
. This means that  .
.
Thus, if  is a Gröbner basis of
is a Gröbner basis of  , then for all
, then for all  ,
,

Unfortunately, Hilbert's basis theorem is not constructive, since it
does not tell us how to compute a Gröbner basis for an ideal  and basis
and basis  . In the following, we investigate how the finite set
. In the following, we investigate how the finite set  can fail to be a Gröbner basis for an ideal
can fail to be a Gröbner basis for an ideal  .
.
Let  be nonzero polynomials,
be nonzero polynomials,  ,
,  , and
, and  . The S-polynomial of
. The S-polynomial of  and
and  is
is

It is easy to see that  , moreover, since
, moreover, since  , therefore
, therefore  .
.
The following theorem yields an easy method to test whether a given set  is a Gröbner basis of the ideal
is a Gröbner basis of the ideal  .
.
Theorem 6.18 The set  is the Gröbner basis of the ideal
is the Gröbner basis of the ideal  if and only if
if and only if

Using the  -polynomials,
it is easy to give an algorithm for constructing the Gröbner basis. We
present a simplified version of Buchberger's method (
-polynomials,
it is easy to give an algorithm for constructing the Gröbner basis. We
present a simplified version of Buchberger's method ( ): given a monomial order
): given a monomial order  and polynomials
and polynomials  , the algorithm yields a
, the algorithm yields a  Gröbner basis of the ideal
Gröbner basis of the ideal  .
.
Gröbner-basis(
)
12
3
WHILE4
DOan arbitrary pair from
5
6
7
IF8
THEN9
10
RETURN
First we show the correctness of the Gröbner-basis algorithm assuming that the procedure terminates. At any stage of the algorithm, set  is a basis of ideal
is a basis of ideal  , since initially it is, and at any other step only those elements are added to
, since initially it is, and at any other step only those elements are added to  that are remainders of the
that are remainders of the  -polynomials on division by
-polynomials on division by  . If the algorithm terminates, the remainders of all
. If the algorithm terminates, the remainders of all  -polynomials on division by
-polynomials on division by  are zero, and by Theorem (6.18),
are zero, and by Theorem (6.18),  is a Gröbner basis.
is a Gröbner basis.
Next we show that the algorithm terminates. Let  and
and  be the sets corresponding to successive iterations of the while cycle (lines 3-9). Clearly,
be the sets corresponding to successive iterations of the while cycle (lines 3-9). Clearly,  and
and  . Hence, ideals
. Hence, ideals  in successive iteration steps form an ascending chain, which stabilises by Corollary (6.15). Thus, after a finite number of steps, we have
in successive iteration steps form an ascending chain, which stabilises by Corollary (6.15). Thus, after a finite number of steps, we have  . We state that
. We state that  in this case. Let
in this case. Let  and
and  . Then
. Then  and either
and either  or
or  , and using the definition of the remainder, we conclude that
, and using the definition of the remainder, we conclude that  .
.
 ,
,  ,
,  ,
,  .
.  by step one, and
by step one, and  by step two.
by step two.
At the first iteration of the while cycle, let us choose the pair  . Then
. Then  ,
,  and
and  . Therefore,
. Therefore,  and
and  .
.
At the second iteration of the while cycle, let us choose the pair  . Then
. Then  ,
,  ,
,  , hence,
, hence,  and
and  .
.
At the third iteration of the while cycle, let us choose the pair  . Then
. Then  ,
,  ,
,  .
.
At the fourth iteration, let us choose the pair  . Then
. Then  ,
,  ,
,  .
.
In the same way, the remainder of the  -polynomials of all the remaining pairs on division by
-polynomials of all the remaining pairs on division by  are zero hence, the algorithm returns with
are zero hence, the algorithm returns with  which constitutes a Gröbner basis.
which constitutes a Gröbner basis.
In general, the Gröbner basis computed by Buchberger's algorithm is neither unique nor minimal. Fortunately, both can be achieved by a little finesse.
Lemma 6.19 If  is a Gröbner basis of
is a Gröbner basis of  ,
,  and
and  , then
, then  is a Gröbner basis of
is a Gröbner basis of  as well.
as well.
We say that the set  is a minimal Gröbner basis for ideal
is a minimal Gröbner basis for ideal  if it is a Gröbner basis, and for all
if it is a Gröbner basis, and for all  ,
,
-
 ,
, -
 .
.
An element  of a Gröbner basis
of a Gröbner basis  is said to be reduced with respect to
is said to be reduced with respect to  if no monomial of
if no monomial of  is in the ideal
is in the ideal  . A minimal Gröbner basis
. A minimal Gröbner basis  for
for  is reduced if all of its elements are reduced with respect to
is reduced if all of its elements are reduced with respect to  .
.
Theorem 6.20 Every ideal has a unique reduced Gröbner basis.
Example 6.15 In Example 6.14 not only  but also
but also  is a Gröbner basis. It is not hard to show that
is a Gröbner basis. It is not hard to show that  is a reduced Gröbner basis.
is a reduced Gröbner basis.
The last forty years (since Buchberger's dissertation) was not
enough to clear up entirely the algorithmic complexity of Gröbner basis
computation. Implementation experiments show that we are faced with the
intermediate expression swell phenomenon. Starting with a few
polynomials of low degree and small coefficients, the algorithm
produces a large number of polynomials with huge degrees and enormous
coefficients. Moreover, in contrast to the variants of the Euclidean
algorithm, the explosion cannot be kept under control. In  ,
Kühnle and Mayr gave an exponential space algorithm for computing a
reduced Gröbner basis. The polynomial ideal membership problem over
,
Kühnle and Mayr gave an exponential space algorithm for computing a
reduced Gröbner basis. The polynomial ideal membership problem over  is EXPSPACE-complete.
is EXPSPACE-complete.
Let  be polynomials over a field
be polynomials over a field  with
with  (
( ). If
). If  , then
, then

for polynomials  for which their degrees are bounded by
for which their degrees are bounded by  . The double exponential bound is essentially unavoidable, which is shown by several examples. Unfortunately, in case
. The double exponential bound is essentially unavoidable, which is shown by several examples. Unfortunately, in case  , the ideal membership problem falls into this category. Fortunately, in special cases better results are available. If
, the ideal membership problem falls into this category. Fortunately, in special cases better results are available. If  (Hilbert's famous Nullstellensatz), then in case
(Hilbert's famous Nullstellensatz), then in case  , the bound is
, the bound is  , while for
, while for  , the bound is
, the bound is  . But the variety
. But the variety  is empty if and only if
is empty if and only if  , therefore the solvability problem of a polynomial system is in PSPACE. Several results state that under specific circumstances, the (general) ideal membership problem is also in PSPACE. Such a criterion is for example that
, therefore the solvability problem of a polynomial system is in PSPACE. Several results state that under specific circumstances, the (general) ideal membership problem is also in PSPACE. Such a criterion is for example that  is zero-dimensional (contains finitely many isolated points).
is zero-dimensional (contains finitely many isolated points).
In spite of the exponential complexity, there are many successful stories for the application of Gröbner bases: geometric theorem proving, robot kinematics and motion planning, solving polynomial systems of equations are the most widespread application areas. In the following, we enumerate some topics where the Gröbner basis strategy has been applied successfully.
-
Equivalence of polynomial equations. Two sets of polynomials generate the same ideal if and only if their Gröbner bases are equal with arbitrary monomial order.
-
Solvability of polynomial equations. The polynomial system of equations
 is solvable if and only if
is solvable if and only if  .
. -
Finitely many solutions of polynomial equations. The polynomial system of equations
 has a finite number of solutions if and only if in any Gröbner basis of
has a finite number of solutions if and only if in any Gröbner basis of  for every variable
for every variable  , there is a polynomial such that its leading term with respect to the chosen monomial order is a power of
, there is a polynomial such that its leading term with respect to the chosen monomial order is a power of  .
. -
The number of solutions. Suppose that the system of polynomial equations
 has a finite number of solutions. Then the number of solutions counted
with multiplicityes is equal to the cardinality of the set of monomials
that are not multiples of the leading monomials of the polynomials in
the Gröbner basis, where any monomial order can be chosen.
has a finite number of solutions. Then the number of solutions counted
with multiplicityes is equal to the cardinality of the set of monomials
that are not multiples of the leading monomials of the polynomials in
the Gröbner basis, where any monomial order can be chosen. -
Simplification of expressions.
We show an example for the last item.
Example 6.16 Let  be given such that
be given such that

Compute the value of  . So let
. So let  and
and  be elements of
be elements of  and let
and let  ,
,  . Then the Gröbner basis of
. Then the Gröbner basis of  is
is

Since  , the answer to the question follows.
, the answer to the question follows.
Exercises
6.3-1 Prove that the orders  and
and  are monomial orders.
are monomial orders.
6.3-2 Let  be a monomial order on
be a monomial order on  ,
,  . Prove the following:
. Prove the following:
a.  ,
,
b. if  , then
, then  , where equality holds if
, where equality holds if  .
.
6.3-3 Let  .
.
a. Determine the order of the monomials in  for the monomial orders
for the monomial orders  ,
,  and
and  with
with  in all cases.
in all cases.
b. For each of the three monomial orders from ( ), determine
), determine  ,
,  ,
,  and
and  .
.
6.3-4 Prove Dickson's lemma.
6.3-5 Compute the Gröbner basis and the reduced Gröbner basis of the ideal  using the monomial order
using the monomial order  , where
, where  . Which of the following polynomials belong to
. Which of the following polynomials belong to  :
:  ?
?
The problem of indefinite integration is the following: given a function  , find a function
, find a function  the derivative of which is
the derivative of which is  , that is,
, that is,  ; for this relationship the notation
; for this relationship the notation  is also used. In introductory calculus courses, one tries to solve
indefinite integration problems by different methods, among which one
tries to choose in a heuristic way: substitution, trigonometric
substitution, integration by parts, etc. Only the integration of
rational functions is usually solved by an algorithmic method.
is also used. In introductory calculus courses, one tries to solve
indefinite integration problems by different methods, among which one
tries to choose in a heuristic way: substitution, trigonometric
substitution, integration by parts, etc. Only the integration of
rational functions is usually solved by an algorithmic method.
It can be shown that indefinite integration in the general case is algorithmically unsolvable. So we only have the possibility to look for a reasonably large part that can be solved using algorithms.
The first step is the algebraisation of the problem: we discard every analytical concept and consider differentiation as a new (unary) algebraic operation connected to addition and multiplication in a given way, and we try to find the “inverse” of this operation. This approach leads to the introduction of the concept of differential algebra.
The integration routines of computer algebra systems (e.g. MAPLE),
similarly to us, first try a few heuristic methods. Integrals of
polynomials (or a bit more generally, finite Laurent-series) are easy
to determine. This is followed by a simple table lookup process (e.g.
in case of MAPLE
35 basic integrals are used). One can, of course, use integral tables
entered from books as well. Next we may look for special cases where
appropriate methods are known. For example, for integrands of the form

where  is a polynomial, the integral can be determined using integration by
parts. When the above methods fail, a form of substitution called the
“derivative-divides” method is tried: if the integrand is a composite
expression, then for every sub-expression
is a polynomial, the integral can be determined using integration by
parts. When the above methods fail, a form of substitution called the
“derivative-divides” method is tried: if the integrand is a composite
expression, then for every sub-expression  , we divide by the derivative of
, we divide by the derivative of  , and check if
, and check if  vanishes from the result after the substitution
vanishes from the result after the substitution  .
Using these simple methods we can determine a surprisingly large number
of integrals. To their great advantage, they can solve simple problems
very quickly. If they do not succeed, we try algorithmic methods. The
first one is for the integration of rational functions. As we will see,
there is a significant difference between the version used in computer
algebra systems and the version used in hand computations, since the
aims are short running times even in complicated cases, and the
simplest possible form of the result. The Risch algorithm for
integrating elementary functions is based on the algorithm for the
integration of rational functions. We describe the Risch algorithm, but
not in full detail. In most cases, we only outline the proofs.
.
Using these simple methods we can determine a surprisingly large number
of integrals. To their great advantage, they can solve simple problems
very quickly. If they do not succeed, we try algorithmic methods. The
first one is for the integration of rational functions. As we will see,
there is a significant difference between the version used in computer
algebra systems and the version used in hand computations, since the
aims are short running times even in complicated cases, and the
simplest possible form of the result. The Risch algorithm for
integrating elementary functions is based on the algorithm for the
integration of rational functions. We describe the Risch algorithm, but
not in full detail. In most cases, we only outline the proofs.
In this subsection, we introduce the notion of differential field and differential extension field, then we describe Hermite's method.
Let  be a field of characteristic 0, with a mapping
be a field of characteristic 0, with a mapping  of
of  into itself satisfying:
into itself satisfying:
(1)  (additivity);
(additivity);
(2)  (Leibniz-rule).
(Leibniz-rule).
The mapping  is called a differential operator, differentiation or derivation, and
is called a differential operator, differentiation or derivation, and  is called a differential field. The set
is called a differential field. The set  is the field of constants or constant subfield in
is the field of constants or constant subfield in  . If
. If  , we also write
, we also write  . Obviously, for any constant
. Obviously, for any constant  , we have
, we have  . The logarithmic derivative of an element
. The logarithmic derivative of an element  is defined as
is defined as  (the “derivative of
(the “derivative of  ”).
”).
Theorem 6.21 With the notations of the previous definition, the usual rules of derivation hold:
(1)  ;
;
(2) derivation is  -linear:
-linear:  for
for  ,
,  ;
;
(3) if  ,
,  is arbitrary, then
is arbitrary, then  ;
;
(4)  for
for  and
and  ;
;
(5)  for
for  (integration by parts).
(integration by parts).
Example 6.17 (1) With the notations of the previous definition, the mapping  on
on  is the trivial derivation, for this we have
is the trivial derivation, for this we have  .
.
(2) Let  . There exists a single differential operator on
. There exists a single differential operator on  with
with  , it is the usual differentiation. For this the constants are the elements of
, it is the usual differentiation. For this the constants are the elements of  . Indeed,
. Indeed,  for
for  by induction, so the elements of
by induction, so the elements of  and
and  are also constants. We have by induction that the derivative of power
functions is the usual one, thus, by linearity, this is true for
polynomials, and by the differentiation rule of quotients, we get the
statement. It is not difficult to calculate that for the usual
differentiation, the constants are the elements of
are also constants. We have by induction that the derivative of power
functions is the usual one, thus, by linearity, this is true for
polynomials, and by the differentiation rule of quotients, we get the
statement. It is not difficult to calculate that for the usual
differentiation, the constants are the elements of  .
.
(3) If  , where
, where  is an arbitrary field of characteristic 0, then there exists a single differential operator on
is an arbitrary field of characteristic 0, then there exists a single differential operator on  with constant subfield
with constant subfield  and
and  : it is the usual differentiation. This statement is obtained similarly to the previous one.
: it is the usual differentiation. This statement is obtained similarly to the previous one.
If  is an arbitrary field of characteristic 0, and
is an arbitrary field of characteristic 0, and  with the usual differentiation, then
with the usual differentiation, then  is not the derivative of anything. (The proof of the statement is very much like the proof of the irrationality of
is not the derivative of anything. (The proof of the statement is very much like the proof of the irrationality of  , but we have to work with divisibility by
, but we have to work with divisibility by  rather than by 2.)
rather than by 2.)
The example shows that for the integration of  and other similar functions, we have to extend the differential field.
In order to integrate rational functions, an extension by logarithms
will be sufficient.
and other similar functions, we have to extend the differential field.
In order to integrate rational functions, an extension by logarithms
will be sufficient.
Let  be a differential field and
be a differential field and  a subfield of
a subfield of  . If differentiation doesn't lead out of
. If differentiation doesn't lead out of  , then we say that
, then we say that  is a differential subfield of
is a differential subfield of  , and
, and  is a differential extension field of
is a differential extension field of  . If for some
. If for some  we have
we have  , that is, the derivative of
, that is, the derivative of  is the logarithmic derivative of
is the logarithmic derivative of  , then we write
, then we write  . (We note that
. (We note that  , just like
, just like  is a relation rather than a function. In other words,
is a relation rather than a function. In other words,  is an abstract concept here and not a logarithm function to a given base.) If we can choose
is an abstract concept here and not a logarithm function to a given base.) If we can choose  , we say that
, we say that  is logarithmic over
is logarithmic over  .
.
Example 6.18 (1) Let  ,
,  , where
, where  is a new indeterminate, and let
is a new indeterminate, and let  , that is,
, that is,  . Then
. Then  .
.
(2) Analogically,

is in the differential field  .
.
(3) Since

the integral can be considered as an element of

or an element of

as well. Obviously, it is more reasonable to choose the first possibility, because in this case there is no need to extend the base field.
Let  be a field of characteristic 0,
be a field of characteristic 0,  non-zero relatively prime polynomials. To compute the integral
non-zero relatively prime polynomials. To compute the integral  using Hermite's method, we can find polynomials
using Hermite's method, we can find polynomials  with
with

where  and
and  is monic and square-free. The rational function
is monic and square-free. The rational function  is called the rational part, the expression
is called the rational part, the expression  is called the logarithmic part of the integral. The method avoids the factorisation of
is called the logarithmic part of the integral. The method avoids the factorisation of  into linear factors (in a factor field or some larger field), and even its decomposition into irreducible factors over
into linear factors (in a factor field or some larger field), and even its decomposition into irreducible factors over  .
.
Trivially, we may assume that  is monic. By Euclidean division we have
is monic. By Euclidean division we have  , where
, where  , thus,
, thus,  . The integration of the polynomial part
. The integration of the polynomial part  is trivial. Let us determine the square-free factorisation of
is trivial. Let us determine the square-free factorisation of  , that is, find monic and pairwise relatively prime polynomials
, that is, find monic and pairwise relatively prime polynomials  such that
such that  and
and  . Let us construct the partial fraction decomposition (this can be achieved by the Euclidean algorithm):
. Let us construct the partial fraction decomposition (this can be achieved by the Euclidean algorithm):
where every  has smaller degree than
has smaller degree than  .
.
The Hermite-reduction is the iteration of the following step: if  , then the integral
, then the integral  is reduced to the sum of a rational function and an integral similar to the original one, with
is reduced to the sum of a rational function and an integral similar to the original one, with  reduced by 1. Using that
reduced by 1. Using that  is square-free, we get
is square-free, we get  , thus, we can obtain polynomials
, thus, we can obtain polynomials  by the application of the extended Euclidean algorithm such that
by the application of the extended Euclidean algorithm such that  and
and  . Hence, using integration by parts,
. Hence, using integration by parts,
It can be shown that using fast algorithms, if  , then the procedure requires
, then the procedure requires  operations in the field
operations in the field  , where
, where  is a bound on the number of operations needed to multiply to polynomials of degree at most
is a bound on the number of operations needed to multiply to polynomials of degree at most  .
.
Hermite's method has a variant that avoids the partial fraction decomposition of  . If
. If  , then
, then  is square-free. If
is square-free. If  , then let
, then let

Since  , there exist polynomials
, there exist polynomials  such that
such that

Dividing both sides by  and integrating by parts,
and integrating by parts,

thus,  is reduced by one.
is reduced by one.
Note that  and
and  can be determined by the method of undetermined coefficients (Horowitz's method). After division, we may assume
can be determined by the method of undetermined coefficients (Horowitz's method). After division, we may assume  . As it can be seen from the algorithm, we can choose
. As it can be seen from the algorithm, we can choose  and
and  . Differentiating (6.15), we get a system of linear equations on
. Differentiating (6.15), we get a system of linear equations on  coefficients of
coefficients of  and
and  coefficients of
coefficients of  , altogether
, altogether  coefficients. This method in general is not as fast as Hermite's method.
coefficients. This method in general is not as fast as Hermite's method.
The algorithm below performs the Hermite-reduction for a rational function  of variable
of variable  .
.
Hermite-Reduction(
)
12
3

Square-Free4 construct the partial fraction decomposition of
, compute numerators
belonging to
5
6
7
FOR
TO8
DO9
FOR
TO10
DO11
WHILE12
DOdetermineand
from the equation
13
14
15
16
17
18
RETURN
If for some field  of characteristic 0, we want to compute the integral
of characteristic 0, we want to compute the integral  , where
, where  are non-zero relatively prime polynomials with
are non-zero relatively prime polynomials with  ,
,  square-free and monic, we can proceed by decomposing polynomial
square-free and monic, we can proceed by decomposing polynomial  into linear factors,
into linear factors,  , in its splitting field
, in its splitting field  , then constructing the partial fraction decomposition,
, then constructing the partial fraction decomposition,  , over
, over  , finally integrating we get
, finally integrating we get

The disadvantage of this method, as we have seen in the example of the function  , is that the degree of the extension field
, is that the degree of the extension field  can be too large. An extension degree as large as
can be too large. An extension degree as large as  can occur, which leads to totally unmanageable cases. On the other
hand, it is not clear either if a field extension is needed at all: for
example, in case of the function
can occur, which leads to totally unmanageable cases. On the other
hand, it is not clear either if a field extension is needed at all: for
example, in case of the function  ,
can we not compute the integral without extending the base field? The
following theorem enables us to choose the degree of the field
extension as small as possible.
,
can we not compute the integral without extending the base field? The
following theorem enables us to choose the degree of the field
extension as small as possible.
Theorem 6.22 (Rothstein-Trager integration algorithm) Let  be a field of characteristic 0,
be a field of characteristic 0,  non-zero relatively prime polynomials,
non-zero relatively prime polynomials,  ,
,  square-free and monic. If
square-free and monic. If  is an algebraic extension of
is an algebraic extension of  ,
,  are square-free and pairwise relatively prime monic polynomials, then the following statements are equivalent:
are square-free and pairwise relatively prime monic polynomials, then the following statements are equivalent:
(1)  ,
,
(2) The polynomial  can be decomposed into linear factors over
can be decomposed into linear factors over  ,
,  are exactly the distinct roots of
are exactly the distinct roots of  , and
, and  if
if  . Here,
. Here,  is the resultant taken in the indeterminate
is the resultant taken in the indeterminate  .
.
Example 6.19 Let us consider again the problem of computing the integral  . In this case,
. In this case,

the roots of which are  and
and  Thus,
Thus,

The algorithm, which can be easily given based on the previous theorem, can be slightly improved: instead of computing  (by calculations over the field
(by calculations over the field  ),
),  can also be computed over
can also be computed over  , applying the
, applying the Extended-Euclidean-Normalised
algorithm. This was discovered by Trager, and independently by Lazard
and Rioboo. It is not difficult to show that the running time of the
complete integration algorithm obtained this way is  if
if  .
.
Theorem 6.23 (Lazard-Rioboo-Trager-formula) Using the notations of the previous theorem, let  denote the multiplicity of
denote the multiplicity of  as a root of the polynomial
as a root of the polynomial  . Then
. Then
(1)  ;
;
(2) if  denotes the remainder of degree
denotes the remainder of degree  in the
in the Extended-Euclidean-Normalised algorithm performed in  on
on  and
and  , then
, then  .
.
The algorithm below is the improved Lazard-Rioboo-Trager version of the Rothstein-Trager method. We compute  for the rational function
for the rational function  of indeterminate
of indeterminate  , where
, where  is square-free and monic, and
is square-free and monic, and  .
.
Integrate-Logarithmic-Part(
)
1 Letby the subresultant algorithm, furthermore 2 let
be the remainder of degree
during the computation 3

Square-free4
5
FOR
TO6
DOIF7
THENthe gcd of the coefficients of
8
Extended-Euclidean-Normalised9
Primitive-Part10
Factors11
FOR
TO12
DO13
Solve14
IF15
THEN16
ELSEFOR
TO17
DO18
RETURN




Example 6.20 Let us consider again the problem of computing the integral  . In this case,
. In this case,

The polynomial is irreducible in  , thus, we cannot avoid the extension of
, thus, we cannot avoid the extension of  . The roots of
. The roots of  are
are  . From the
. From the Extended-Euclidean-Normalised-algorithm over  ,
,  , thus, the integral is
, thus, the integral is

Surprisingly, the methods found for the integration of rational
functions can be generalised for the integration of expressions
containing basic functions ( ,
,  etc.) and their inverse. Computer algebra systems can compute the
integral of remarkably complicated functions, but sometimes they fail
in seemingly very simple cases, for example the expression
etc.) and their inverse. Computer algebra systems can compute the
integral of remarkably complicated functions, but sometimes they fail
in seemingly very simple cases, for example the expression  is returned unevaluated, or the result contains a special
non-elementary function, for example the logarithmic integral. This is
due to the fact that in such cases, the integral cannot be given in
“closed form”.
is returned unevaluated, or the result contains a special
non-elementary function, for example the logarithmic integral. This is
due to the fact that in such cases, the integral cannot be given in
“closed form”.
Although the basic results for integration in “closed form” had been discovered by Liouville in 1833, the corresponding algorithmic methods were only developed by Risch in 1968.
The functions usually referred to as functions in “closed form” are
the ones composed of rational functions, exponential functions,
logarithmic functions, trigonometric and hyperbolic functions, their
inverses and  -th
roots (or more generally “inverses” of polynomial functions, that is,
solutions of polynomial equations); that is, any nesting of the above
functions is also a function in “closed form”.
-th
roots (or more generally “inverses” of polynomial functions, that is,
solutions of polynomial equations); that is, any nesting of the above
functions is also a function in “closed form”.
One might note that while  is usually given in the form
is usually given in the form  , the algorithm for the integration of rational functions returns
, the algorithm for the integration of rational functions returns

as solution. Since trigonometric and hyperbolic functions and their inverses over  can be expressed in terms of exponentials and logarithms, we can
restrict our attention to exponentials and logarithms. Surprisingly, it
also turns out that the only extensions needed are logarithms (besides
algebraic numbers) in the general case.
can be expressed in terms of exponentials and logarithms, we can
restrict our attention to exponentials and logarithms. Surprisingly, it
also turns out that the only extensions needed are logarithms (besides
algebraic numbers) in the general case.
Let  be a differential extension field of the differential field
be a differential extension field of the differential field  . If for a
. If for a  , there exists a
, there exists a  such that
such that  , that is, the logarithmic derivative of
, that is, the logarithmic derivative of  equals the derivative of an element of
equals the derivative of an element of  , then we say that
, then we say that  is exponential over
is exponential over  and we write
and we write  . If only the following is true: for an element
. If only the following is true: for an element  , there is a
, there is a  such that
such that  , that is, the logarithmic derivative of
, that is, the logarithmic derivative of  is an element of
is an element of  , then
, then  is called hyperexponential over
is called hyperexponential over  .
.
Logarithmic, exponential or hyperexponential elements may be algebraic or transcendent over  .
.
Let  be a differential extension field of the differential field
be a differential extension field of the differential field  . If
. If

where for  ,
,  is logarithmic, exponential or algebraic over the field
is logarithmic, exponential or algebraic over the field

( ), then
), then  is called an elementary extension of
is called an elementary extension of  . If for
. If for  ,
,  is either transcendental and logarithmic, or transcendental and exponential over
is either transcendental and logarithmic, or transcendental and exponential over  , then
, then  is a transcendental elementary extension of
is a transcendental elementary extension of  .
.
Let  be the differential field of rational functions with the usual differentiation and constant subfield
be the differential field of rational functions with the usual differentiation and constant subfield  . An elementary extension of
. An elementary extension of  is called a field of elementary functions, a transcendental elementary extension of
is called a field of elementary functions, a transcendental elementary extension of  is called a field of transcendental elementary functions.
is called a field of transcendental elementary functions.
Example 6.21 The function  can be written in the form
can be written in the form  , where
, where  ,
,  ,
,  . Trivially,
. Trivially,  is exponential over
is exponential over  ,
,  is exponential over
is exponential over  and
and  is exponential over
is exponential over  . Since
. Since  and
and  ,
,  can be written in the simpler form
can be written in the simpler form  . The function
. The function  is not only exponential but also algebraic over
is not only exponential but also algebraic over  , since
, since  , that is,
, that is,  . So
. So  . But
. But  can be put in an even simpler form:
can be put in an even simpler form:


can be written in form  , where
, where  ,
,  ,
,  , and
, and  satisfies the algebraic equation
satisfies the algebraic equation  . But
. But  can also be given in the much simpler form
can also be given in the much simpler form  .
.
Example 6.23 The function  can be written in the form
can be written in the form  , where
, where  and
and  , so
, so  is logarithmic over
is logarithmic over  , and
, and  is exponential over
is exponential over  . But
. But  , so
, so  is algebraic over
is algebraic over  , and
, and  .
.
The integral of an element of a field of elementary functions will be completely characterised by Liouville's Principle in case it is an elementary function. Algebraic extensions, however, cause great difficulty if not only the constant field is extended.
Here we only deal with the integration of elements of fields of transcendental elementary functions by the Risch integration algorithm.
In practice, this means an element of the field of transcendental elementary functions  , where
, where  are algebraic over
are algebraic over  and the integral is an element of the field
and the integral is an element of the field

of elementary functions. In principle, it would be simpler to choose  as constant subfield but, as we have seen in the case of rational
functions, this is impossible, for we can only compute in an exact way
in special fields like algebraic number fields; and we even have to
keep the number and degrees of
as constant subfield but, as we have seen in the case of rational
functions, this is impossible, for we can only compute in an exact way
in special fields like algebraic number fields; and we even have to
keep the number and degrees of  as small as possible. Nevertheless, we will deal with algebraic
extensions of the constant subfield dynamically: we can imagine that
the necessary extensions have already been made, while in practice, we
only perform extensions when they become necessary.
as small as possible. Nevertheless, we will deal with algebraic
extensions of the constant subfield dynamically: we can imagine that
the necessary extensions have already been made, while in practice, we
only perform extensions when they become necessary.
After the conversion of trigonometric and hyperbolic functions (and their inverses) to exponentials (and logarithms, respectively), the integrand becomes an element of a field of elementary functions. Examples 6.21 and 6.22 show that there are functions that do not seem to be elements of a transcendental elementary extension “at first sight”, and yet they are; while Example 6.23 shows that there are functions that seem to be elements of such an extension “at first sight”, and yet they are not. The first step is to represent the integrand as an element of a field of transcendental elementary functions using the algebraic relationships between the different exponential and logarithmic functions. We will not consider how this can be done. It can be verified whether we succeeded by the following structure theorem by Risch. We omit the proof of the theorem. We will need a definition.
An element  is monomial over a differential field
is monomial over a differential field  if
if  and
and  have the same constant field,
have the same constant field,  is transcendental over
is transcendental over  and it is either exponential or logarithmic over
and it is either exponential or logarithmic over  .
.
Theorem 6.24 (Structure theorem) Let  be the field of constants and
be the field of constants and  a differential extension field of
a differential extension field of  , which has constant field
, which has constant field  . Let us assume that for all
. Let us assume that for all  , either
, either  is algebraic over
is algebraic over  , or
, or  , with
, with  and
and  , or
, or  , with
, with  and
and  . Then
. Then
1.  , where
, where  , is monomial over
, is monomial over  if and only if there is no product
if and only if there is no product

which is an element of  ;
;
2.  , where
, where  , is monomial over
, is monomial over  if and only if there is no linear combination
if and only if there is no linear combination

which is an element of  .
.
Product and summation is only taken for logarithmic and exponential steps.
The most important classic result of the entire theory is the following theorem.
Theorem 6.25 (Liouville's Principle) Let  be a differential field with constant field
be a differential field with constant field  . Let
. Let  be a differential extension field of
be a differential extension field of  with the same constant field. Let us assume that
with the same constant field. Let us assume that  . Then there exist constants
. Then there exist constants  and elements
and elements  such that
such that
that is,
Note that the situation is similar to the case of rational functions.
We will not prove this theorem. Although the proof is lengthy, the idea of the proof is easy to describe. First we show that a transcendental exponential extension cannot be “eliminated”, that is differentiating a rational function of it, the new element does not vanish. This is due to the fact that differentiating a polynomial of an element of the transcendental exponential extension, we get a polynomial of the same degree, and the original polynomial does not divide the derivative, except for the case when the original polynomial is monomial. Next we show that no algebraic extension is needed to express the integral. This is essentially due to the fact that substituting an element of an algebraic extension into its minimal polynomial, we get zero, and differentiating this equation, we get the derivative of the extending element as a rational function of the element. Finally, we have to examine extensions by transcendental logarithmic elements. We show that such an extending element can be eliminated by differentiation if and only if it appears in a linear polynomial with constant leading coefficient. This is due to the fact that differentiating a polynomial of such an extending element, we get a polynomial the degree of which is either the same or is reduced by one, the latter case only being possible when the leading coefficient is constant.
Let  be an algebraic number field over
be an algebraic number field over  , and
, and  a field of transcendental elementary functions. The algorithm is recursive in
a field of transcendental elementary functions. The algorithm is recursive in  : using the notation
: using the notation  , we will integrate a function
, we will integrate a function  , where
, where  . (The case
. (The case  is the integration of rational functions.) We may assume that
is the integration of rational functions.) We may assume that  and
and  are relatively prime and
are relatively prime and  is monic. Besides differentiation with respect to
is monic. Besides differentiation with respect to  , we will also use differentiation with respect to
, we will also use differentiation with respect to  , which we denote by
, which we denote by  . In the following, we will only present the algorithms.
. In the following, we will only present the algorithms.
Using the notations of the previous paragraph, we first presume that  is transcendental and logarithmic,
is transcendental and logarithmic,  ,
,  . By Euclidean division,
. By Euclidean division,  , hence
, hence
Unlike the integration of rational functions, here the integration of the polynomial part is more difficult. Therefore, we begin with the integration of the rational part.
Let  be the square-free factorisation of
be the square-free factorisation of  . Then
. Then
is obvious. It can be shown that the much stronger condition  is also fulfilled. By partial fraction decomposition,
is also fulfilled. By partial fraction decomposition,
We use Hermite-reduction: using the extended Euclidean algorithm we get polynomials  that satisfy
that satisfy  and
and  . Using integration by parts,
. Using integration by parts,
Continuing this procedure while  , we get
, we get
where  ,
,  and
and  is a square-free and monic polynomial.
is a square-free and monic polynomial.
It can be shown that the Rothstein-Trager method can be applied to compute the integral  . Let us calculate the resultant
. Let us calculate the resultant

It can be shown that the integral is elementary if and only if  is of the form
is of the form  , where
, where  and
and  . If we compute the primitive part of
. If we compute the primitive part of  , choose it as
, choose it as  and any coefficient of
and any coefficient of  is not a constant, then there is no elementary integral. Otherwise, let
is not a constant, then there is no elementary integral. Otherwise, let  be the distinct roots of
be the distinct roots of  in its factor field and le
in its factor field and le

for  . It can be shown that
. It can be shown that
Let us consider a few examples.
Example 6.24 The integrand of the integral  is
is  , where
, where  . Since
. Since

is a primitive polynomial and it has a coefficient that is, not constant, the integral is not elementary.
Example 6.25 The integrand of the integral  is
is  , where
, where  . Here,
. Here,

which has primitive part  . Every coefficient of this is constant, so the integral is elementary,
. Every coefficient of this is constant, so the integral is elementary,  ,
,  , so
, so

The remaining problem is the integration of the polynomial part

According to Liouville's Principle  is elementary if and only if
is elementary if and only if
where  and
and  for
for  ,
,  is an extension of
is an extension of  and
and  . We will show that
. We will show that  can be an algebraic extension of
can be an algebraic extension of  . A similar reasoning to the proof of Liouville's Principle shows that
. A similar reasoning to the proof of Liouville's Principle shows that  and
and  (that is, independent of
(that is, independent of  ) for
) for  . Thus,
. Thus,
We also get, by the reasoning used in the proof of Liouville's Principle, that the degree of  is at most
is at most  . So if
. So if  , then
, then

Hence, we get the following system of equations:
where  in the last equation. The solution of the first equation is simply a constant
in the last equation. The solution of the first equation is simply a constant  . Substituting this into the next equation and integrating both sides, we get
. Substituting this into the next equation and integrating both sides, we get

Applying the integration procedure recursively, the integral of  can be computed, but this equation can only be solved if the integral
is elementary, it uses at most one logarithmic extension, and it is
exactly
can be computed, but this equation can only be solved if the integral
is elementary, it uses at most one logarithmic extension, and it is
exactly  . If this is not fulfilled, then
. If this is not fulfilled, then  cannot be elementary. If it is fulfilled, then
cannot be elementary. If it is fulfilled, then  for some
for some  and
and  , hence,
, hence,  and
and  with an arbitrary integration constant
with an arbitrary integration constant  . Substituting for
. Substituting for  into the next equation and rearranging, we get
into the next equation and rearranging, we get

so we have

after integration. The integrand on the right hand side is in  ,
so we can call the integration procedure in a recursive way. Just like
above, the equation can only be solved when the integral is elementary,
it uses at most one logarithmic extension and it is exactly
,
so we can call the integration procedure in a recursive way. Just like
above, the equation can only be solved when the integral is elementary,
it uses at most one logarithmic extension and it is exactly  . Let us assume that this is the case and
. Let us assume that this is the case and

where  and
and  . Then the solution is
. Then the solution is  and
and  , where
, where  is an arbitrary integration constant. Continuing the procedure, the solution of the penultimate equation is
is an arbitrary integration constant. Continuing the procedure, the solution of the penultimate equation is  and
and  with an integration constant
with an integration constant  . Substituting for
. Substituting for  into the last equation, after rearrangement and integration, we get
into the last equation, after rearrangement and integration, we get

This time the only condition is that the integral should be an elementary function. If it is elementary, say

then  is the coefficient of
is the coefficient of  in
in  ,
,  , and the result is
, and the result is

Let us consider a few examples.
Example 6.26 The integrand of the integral  is
is  , where
, where  . If the integral is elementary, then
. If the integral is elementary, then
and  ,
,  ,
,  . With the unknown constant
. With the unknown constant  from the second equation,
from the second equation,  . Since
. Since  , we get
, we get  ,
,  . From the third equation
. From the third equation  . Since
. Since  , after integration
, after integration  and
and  , we get
, we get  ,
,  , hence,
, hence,  .
.
Example 6.27 The integrand of the integral  is
is  , where
, where  and
and  . If the integral is elementary, then
. If the integral is elementary, then
and  ,
,  ,
,  . With the unknown constant
. With the unknown constant  from the second equation,
from the second equation,  . Since
. Since  , we get
, we get  ,
,  . From the third equation
. From the third equation  . Since
. Since  , the equation
, the equation
must hold but we know from Example 6.24 that the integral on the left hand side is not elementary.
Now we assume that  is transcendental and exponential,
is transcendental and exponential,  ,
,  . By Euclidean division,
. By Euclidean division,  , hence
, hence
We
plan using Hermite's method for the rational part. But we have to face
an unpleasant surprise: although for the square-free factors 
is obviously satisfied, the much stronger condition  is not. For example, if
is not. For example, if  , then
, then

It can be shown, however, that this unpleasant phenomenon does not appear if  , in which case
, in which case  . Thus, it will be sufficient to eliminate
. Thus, it will be sufficient to eliminate  from the denominator. Let
from the denominator. Let  , where
, where  , and let us look for polynomials
, and let us look for polynomials  with
with  ,
,  and
and  . Dividing both sides by
. Dividing both sides by  , we get
, we get
Using the notation  ,
,  is a finite Laurent-series the integration of which will be no harder
than the integration of a polynomial. This is not surprising if we note
is a finite Laurent-series the integration of which will be no harder
than the integration of a polynomial. This is not surprising if we note
 . Even so, the integration of the “polynomial part” is more difficult here, too. We start with the other one.
. Even so, the integration of the “polynomial part” is more difficult here, too. We start with the other one.
Let  be the square-free factorisation of
be the square-free factorisation of  . Then, since
. Then, since  ,
,  . Using partial fraction decomposition
. Using partial fraction decomposition
Hermite-reduction goes the same way as in the logarithmic case. We get
where  ,
,  and
and  is a square-free and monic polynomial,
is a square-free and monic polynomial,  .
.
It can be shown that the Rothstein-Trager method can be applied to compute the integral  . Let us calculate the resultant
. Let us calculate the resultant

It can be shown that the integral is elementary if and only if  is of form
is of form  , where
, where  and
and  . If we compute the primitive part of
. If we compute the primitive part of  , choose it as
, choose it as  and any coefficient of
and any coefficient of  is not a constant, then there is no elementary integral. Otherwise, let
is not a constant, then there is no elementary integral. Otherwise, let  be the distinct roots of
be the distinct roots of  in its factor field and let
in its factor field and let

for  . It can be shown that
. It can be shown that

Let us consider a few examples.
Example 6.28 The integrand of the integral  is
is  , where
, where  . Since
. Since

is a primitive polynomial which only has constant coefficients, the integral is elementary,  ,
,  , thus,
, thus,

Example 6.29 The integrand of the integral  is
is  , where
, where  . Since
. Since

is a primitive polynomial that has a non-constant coefficient, the integral is not elementary.
The remaining problem is the integration of the “polynomial part”
According to Liouville's Principle  is elementary if and only if
is elementary if and only if
where  and
and  for
for  ,
,  is an extension of
is an extension of  and
and  . It can be shown that
. It can be shown that  can be an algebraic extension of
can be an algebraic extension of  . A similar reasoning to the proof of Liouville's Principle shows that we may assume without breaking generality that
. A similar reasoning to the proof of Liouville's Principle shows that we may assume without breaking generality that  is either an element of
is either an element of  (that is, independent of
(that is, independent of  ), or it is monic and irreducible in
), or it is monic and irreducible in  for
for  . Furthermore, it can be shown that there can be no non-monomial factor in the denominator of
. Furthermore, it can be shown that there can be no non-monomial factor in the denominator of  , since such a factor would also be present in the derivative. Similarly, the denominator of
, since such a factor would also be present in the derivative. Similarly, the denominator of 
 can have no non-monomial factor either. So we get that either
can have no non-monomial factor either. So we get that either  , or
, or  , since this is the only irreducible monic monomial. But if
, since this is the only irreducible monic monomial. But if  , then the corresponding term of the sum is
, then the corresponding term of the sum is  , which can be incorporated into
, which can be incorporated into  . Hence, we get that if
. Hence, we get that if  has an elementary integral, then
has an elementary integral, then
where  and
and  . The summation should be taken over the same range as in
. The summation should be taken over the same range as in  since
since

Comparing the coefficients, we get the system

where  . The solution of the equation
. The solution of the equation  is simply
is simply  ; if this integral is not elementary, then
; if this integral is not elementary, then  cannot be elementary either, but if it is, then we have determined
cannot be elementary either, but if it is, then we have determined  . In the case
. In the case  , we have to solve a differential equation called Risch differential equation to determine
, we have to solve a differential equation called Risch differential equation to determine  . The differential equation is of the form
. The differential equation is of the form  , where the given functions
, where the given functions  and
and  are elements of
are elements of  , and we are looking for solutions in
, and we are looking for solutions in  .
At first sight it looks as if we had replaced the problem of
integration with a more difficult problem, but the linearity of the
equations and that the solution has to be in
.
At first sight it looks as if we had replaced the problem of
integration with a more difficult problem, but the linearity of the
equations and that the solution has to be in  means a great facility. If any Risch differential equation fails to have a solution in
means a great facility. If any Risch differential equation fails to have a solution in  , then
, then  is not elementary, otherwise
is not elementary, otherwise
The Risch differential equation can be solved algorithmically, but we will not go into details.
Let us consider a few examples.
Example 6.30 The integrand of the integral  is
is  , where
, where  . If the integral is elementary, then
. If the integral is elementary, then  , where
, where  . It is not difficult to show that the differential equation has no rational solutions, so
. It is not difficult to show that the differential equation has no rational solutions, so  is not elementary.
is not elementary.
Example 6.31 The integrand of the integral  is
is  , where
, where  and
and  . If the integral is elementary, then
. If the integral is elementary, then  , where
, where  . Differentiating both sides,
. Differentiating both sides,  , thus,
, thus,  . Since
. Since  is transcendental over
is transcendental over  , by comparing the coefficients
, by comparing the coefficients  and
and  , which has no solutions. Therefore,
, which has no solutions. Therefore,  is not elementary.
is not elementary.
Example 6.32 The integrand of the integral

is

where  . If the integral is elementary, then it is of the form
. If the integral is elementary, then it is of the form  , where
, where
The second equation can be integrated and  is elementary. The solution of the first equation is
is elementary. The solution of the first equation is  . Hence,
. Hence,

Exercises
6.4-1 Apply Hermite-reduction to the following function  :
:

6.4-2 Compute the integral  , where
, where

6.4-3 Apply the Risch integration algorithm to compute the following integral:

So far in the chapter we tried to illustrate the algorithm design problems of computer algebra through the presentation of a few important symbolic algorithms. Below the interested reader will find an overview of the wider universe of the research of symbolic algorithms.
Besides the resultant method and the theory of Gröbner-bases presented in this chapter, there also exist algorithms for finding real symbolic roots of non-linear equations and inequalities. (Collins).
There are some remarkable algorithms in the area of symbolic
solution of differential equations. There exists a decision procedure
similar to the Risch algorithm for the computation of solutions in
closed form of a homogeneous ordinary differential equation of second
degree with rational function coefficients. In case of higher degree
linear equations, Abramov's procedure gives closed rational solutions
of an equation with polynomial coefficients, while Bronstein's
algorithm gives solutions of the form  .
In the case of partial differential equations Lie's symmetry methods
can be used. There also exists an algorithm for the factorisation of
linear differential operators over formal power series and rational
functions.
.
In the case of partial differential equations Lie's symmetry methods
can be used. There also exists an algorithm for the factorisation of
linear differential operators over formal power series and rational
functions.
Procedures based on factorisation are of great importance in the
research of computer algebra algorithms. They are so important that
many consider the birth of the entire research field with Berlekamp's
publication on an effective algorithm for the factorisation of
polynomials of one variable over finite fields of small characteristic  .
Later, Berlekamp extended his results for larger characteristic. In
order to have similarly good running times, he introduced probabilistic
elements into the algorithm. Today's computer algebra systems use
Berlekamp's procedure even for large finite fields as a routine,
perhaps without most of the users knowing about the probabilistic
origin of the algorithm. The method will be presented in another
chapter of the book. We note that there are numerous algorithms for the
factorisation of polynomials over finite fields.
.
Later, Berlekamp extended his results for larger characteristic. In
order to have similarly good running times, he introduced probabilistic
elements into the algorithm. Today's computer algebra systems use
Berlekamp's procedure even for large finite fields as a routine,
perhaps without most of the users knowing about the probabilistic
origin of the algorithm. The method will be presented in another
chapter of the book. We note that there are numerous algorithms for the
factorisation of polynomials over finite fields.
Not much time after polynomial factorisation over finite fields was solved, Zassenhaus, taking van der Waerden's book Moderne Algebra from 1936 as a base, used Hensel's lemma for the arithmetic of  -adic
numbers to extend factorisation. “Hensel-lifting” – as his procedure is
now called – is a general approach for the reconstruction of factors
from their modular images. Unlike interpolation, which needs multiple
points from the image, Hensel-lifting only needs one point from the
image. The Berlekamp–Zassenhaus-algorithm for the factorisation of
polynomials with integer coefficients is of fundamental importance but
it has two hidden pitfalls. First, for a certain type of polynomial the
running time is exponential. Unfortunately, many “bad” polynomials
appear in the case of factorisation over algebraic number fields.
Second, a representation problem appears for multivariable polynomials,
similar to what we have encountered at the Gauss-elimination of sparse
matrices. The first problem was solved by a Diophantine optimisation
based on the geometry of numbers, a so-called lattice reduction
algorithm by Lenstra-Lenstra-Lovász [161];
it is used together with Berlekamp's method. This polynomial algorithm
is completed by a procedure which ensures that the Hensel-lifting will
start from a “good” modular image and that it will end “in time”.
Solutions have been found for the mentioned representation problem of
the factorisation of multivariable polynomials as well. This is the
second area where randomisation plays a crucial role in the design of
effective algorithms. We note that in practice, the
Berlekamp-Zassenhaus-Hensel-algorithm proves more effective than the
Lenstra-Lenstra-Lovász-procedure. As a contrast, the problem of
polynomial factorisation can be solved in polynomial time, while the
best proved algorithmic bound for the factorisation of the integer
-adic
numbers to extend factorisation. “Hensel-lifting” – as his procedure is
now called – is a general approach for the reconstruction of factors
from their modular images. Unlike interpolation, which needs multiple
points from the image, Hensel-lifting only needs one point from the
image. The Berlekamp–Zassenhaus-algorithm for the factorisation of
polynomials with integer coefficients is of fundamental importance but
it has two hidden pitfalls. First, for a certain type of polynomial the
running time is exponential. Unfortunately, many “bad” polynomials
appear in the case of factorisation over algebraic number fields.
Second, a representation problem appears for multivariable polynomials,
similar to what we have encountered at the Gauss-elimination of sparse
matrices. The first problem was solved by a Diophantine optimisation
based on the geometry of numbers, a so-called lattice reduction
algorithm by Lenstra-Lenstra-Lovász [161];
it is used together with Berlekamp's method. This polynomial algorithm
is completed by a procedure which ensures that the Hensel-lifting will
start from a “good” modular image and that it will end “in time”.
Solutions have been found for the mentioned representation problem of
the factorisation of multivariable polynomials as well. This is the
second area where randomisation plays a crucial role in the design of
effective algorithms. We note that in practice, the
Berlekamp-Zassenhaus-Hensel-algorithm proves more effective than the
Lenstra-Lenstra-Lovász-procedure. As a contrast, the problem of
polynomial factorisation can be solved in polynomial time, while the
best proved algorithmic bound for the factorisation of the integer  is
is  (Pollard and Strassen) in the deterministic case and
(Pollard and Strassen) in the deterministic case and  (Lenstra and Pomerance) in the probabilistic case, where
(Lenstra and Pomerance) in the probabilistic case, where  .
.
In fact, a new theory of heuristic or probabilistic methods in computer algebra is being born to avoid computational or memory explosion and to make algorithms with deterministically large running times more effective. In the case of probabilistic algorithms, the probability of inappropriate operations can be positive, which may result in an incorrect answer (Monte Carlo algorithms) or—although we always get the correct answer (Las Vegas algorithms)—we may not get anything in polynomial time. Beside the above examples, nice results have been achieved in testing polynomial identity, irreducibility of polynomials, determining matrix normal forms (Frobenius, Hilbert, Smith), etc. Their role is likely to increase in the future.
So far in the chapter we gave an overview of the most important symbolic algorithms. We mentioned in the introduction that most computer algebra systems are also able to perform numeric computations: unlike traditional systems, the precision can be set by the user. In many cases, it is useful to combine the symbolic and numeric computations. Let us consider for example the symbolically computed power series solution of a differential equation. After truncation, evaluating the power series with the usual floating point arithmetics in certain points, we get a numerical approximation of the solution. When the problem is an approximation of a physical problem, the attractivity of the symbolic computation is often lost, simply because they are too complicated or too slow and they are not necessary or useful, since we are looking for a numerical solution. In other cases, when the problem cannot be dealt with using symbolic computation, the only way is the numerical approximation. This may be the case when the existing symbolic algorithm does not find a closed solution (e.g. the integral of non-elementary functions, etc.), or when a symbolic algorithm for the specified problem does not exist. Although more and more numerical algorithms have symbolic equivalents, numerical procedures play an important role in computer algebra. Let us think of differentiation and integration: sometimes traditional algorithms—integral transformation, power series approximation, perturbation methods—can be the most effective.
In the design of computer algebra algorithms, parallel architectures will play an increasing role in the future. Although many existing algorithms can be parallelised easily, it is not obvious that good sequential algorithms will perform optimally on parallel architectures as well: the optimal performance might be achieved by a completely different method.
The development of computer algebra systems is linked with the development of computer science and algorithmic mathematics. In the early period of computers, researchers of different fields began the development of the first computer algebra systems to facilitate and accelerate their symbolic computations; these systems, reconstructed and continuously updated, are present in their manieth versions today. General purpose computer algebra systems appeared in the seventies, and provide a wide range of built-in data structures, mathematical functions and algorithms, trying to cover a wide area of users. Because of their large need of computational resources, their expansion became explosive in the beginning of the eighties when microprocessor-based workstations appeared. Better hardware environments, more effective resource management, the use of system-independent high-level languages and, last but not least social-economic demands gradually transformed general purpose computer algebra systems into market products, which also resulted in a better user interface and document preparation.
Below we list the most widely known general and special purpose computer algebra systems and libraries.
-
General purpose computer algebra systems:
AXIOM, DERIVE, FORM, GNU-CALC, JACAL, MACSYMA, MAXIMA, MAPLE, DISTRIBUTED MAPLE, MATHCAD, MATLAB SYMBOLIC MATH TOOLBOX, SCILAB, MAS, MATHEMATICA, MATHVIEW, MOCK-MMA, MUPAD, REDUCE, RISA. -
Algebra and number theory:
BERGMAN, COCOA, FELIX, FERMAT, GRB, KAN, MACAULAY, MAGMA, NUMBERS, PARI, SIMATH, SINGULAR. -
Algebraic geometry:
CASA, GANITH. -
Group theory:
GAP, LIE, MAGMA, SCHUR. -
Tensor analysis:
CARTAN, FEYNCALC, GRG, GRTENSOR, MATHTENSOR, REDTEN, RICCI, TTC. -
Computer algebra libraries:
APFLOAT, BIGNUM, GNU MP, KANT, LIDIA, NTL, SACLIB, UBASIC, WEYL, ZEN.
Most general purpose computer algebra systems are characterised by
-
interactivity,
-
knowledge of mathematical facts,
-
a high-level, declarative
-
programming language with the possibility of functional programming and the knowledge of mathematical objects,
-
expansibility towards the operational system and other programs,
-
integration of symbolic and numeric computations,
-
automatic (optimised) C and Fortran code generation,
-
graphical user interface,
-
2- and 3-dimensional graphics and animation,
-
possibility of editing text and automatic LaTeX conversion,
-
on-line help.
Computer algebra systems are also called mathematical expert systems. Today we can see an astonishing development of general purpose computer algebra systems, mainly because of their knowledge and wide application area. But it would be a mistake to underestimate special systems, which play a very important role in many research fields, besides, in many cases are easier to use and more effective due to their system of notation and the low-level programming language implementation of their algorithms. It is essential that we choose the most appropriate computer algebra system to solve a specific problem.
Footnote. Declarative programming languages specify the desired result unlike imperative languages, which describe how to get the result.
PROBLEMS |
6-1 The length of coefficients in the series of remainders in a Euclidean division
Generate two pseudorandom polynomials of degree  in
in  with coefficients of
with coefficients of  decimal digits. Perform a single Euclidean division in (in
decimal digits. Perform a single Euclidean division in (in  ) and compute the ratio of the maximal coefficients of the remainder and the original polynomial (determined by the function
) and compute the ratio of the maximal coefficients of the remainder and the original polynomial (determined by the function  ). Repeat the computation
). Repeat the computation  times and compute the average. What is the result? Repeat the experiment with
times and compute the average. What is the result? Repeat the experiment with  .
.
6-2 Simulation of the Modular-Gcd-Smallprimes algorithm
Using simulation, give an estimation for the optimal value of the variable  in the
in the Modular-Gcd-Smallprimes algorithm. Use random polynomials of different degrees and coefficient magnitudes.
6-3 Modified pseudo-euclidean division
Let  . Modify the pseudo-euclidean division in such a way that in the equation
. Modify the pseudo-euclidean division in such a way that in the equation

instead of the exponent  put the smallest value
put the smallest value  such that
such that  . Replace the procedures
. Replace the procedures  and
and  in the
in the Primitive-Euclidean algorithm by the obtained procedures  and
and  . Compare the amount of memory space required by the algorithms.
. Compare the amount of memory space required by the algorithms.
6-4 Construction of reduced Gröbner basis
Design an algorithm that computes a reduced Gröbner basis from a given Gröbner-basis  .
.
6-5 Implementation of Hermite-reduction
Implement Hermite-reduction in a chosen computer algebra language.
6-6 Integration of rational functions
Write a program for the integration of rational functions.
CHAPTER NOTES |
The algorithms Classical-Euclidean and Extended-Euclidean for non-negative integers are described in [54].
A natural continuation of the theory of resultants leads to
subresultants, which can help in reducing the growth of the
coefficients in the Extended-Euclidean algorithm (see e.g. [82], [88]).
Gröbner bases were introduced by B. Buchberger in 1965 [35].
Several authors examined polynomial ideals before this. The most
well-known is perhaps Hironaka, who used bases of ideals of power
series to resolve singularities over  .
He was rewarded a Fields-medal for his work. His method was not
constructive, however. Gröbner bases have been generalised for many
algebraic structures in the last two decades.
.
He was rewarded a Fields-medal for his work. His method was not
constructive, however. Gröbner bases have been generalised for many
algebraic structures in the last two decades.
The bases of differential algebra have been layed by J. F. Ritt in 1948 [213]. The square-free factorisation algorithm used in symbolic integration can be found for example in the books [82], [88]. The importance of choosing the smallest possible extension degree in Hermite-reduction is illustrated by Example 11.11 in [88],
where the splitting field has very large degree but the integral can be
expressed in an extension of degree 2. The proof of the
Rothstein-Trager integration algorithm can be found in [82]
(Theorem 22.8). We note that the algorithm was found independently by
Rothstein and Trager. The proof of the correctness of the
Lazard-Rioboo-Trager formula, the analysis of the running time of the Integrate-Logarithmic-Part
algorithm, an overview of the procedures that deal with the
difficulties of algebraic extension steps, the determination of the
hyperexponential integral (if exists) of a hyperexponential element
over  ,
the proof of Liouville's principle and the proofs of the statements
connected to the Risch algorithm can be found in the book [82].
,
the proof of Liouville's principle and the proofs of the statements
connected to the Risch algorithm can be found in the book [82].
There are many books and publications available on computer algebra and related topics. The interested reader will find mathematical description in the following general works: Caviness [42], Davenport et al. [60], von zur Gathen et al. [82], Geddes et al. [88], Knuth [144], [145], [146], Mignotte [181], Mishra [184], Pavelle et al. [201], Winkler [276].
The computer-oriented reader will find further information on computer algebra in Christensen [44], Gonnet and Gruntz [96], Harper et al. [107] and on the world wide web.
A wide range of books and articles deal with applications, e.g. Akritas [10], Cohen et al. (eds.) [50], [49], Grossman (ed.) [101], Hearn (ed.) [110], Kovács [148] and Odlyzko [195].
For the role of computer algebra systems in education see for example the works of Karian [138] and Uhl [260].
Conference proceedings: AAECC, DISCO, EUROCAL, EUROSAM, ISSAC and SYMSAC.
Computer algebra journals: Journal of Symbolic Computation—Academic Press, Applicable Algebra in Engineering, Communication and Computing—Springer-Verlag, Sigsam Bulletin—ACM Press.
The Department of Computer Algebra of the Eötvös Loránd University, Budapest takes works [82], [88], [181], [276] as a base in education.
Table of Contents
This chapter introduces a number of cryptographic protocols and their underlying problems and algorithms. A typical cryptographic scenario is shown in Figure 7.1 (the design of Alice and Bob is due to Crépeau). Alice and Bob wish to exchange messages over an insecure channel, such as a public telephone line or via email over a computer network. Erich is eavesdropping on the channel. Knowing that their data transfer is being eavesdropped, Alice and Bob encrypt their messages using a cryptosystem.
In Section 7.1,
various symmetric cryptosystems are presented. A cryptosystem is said
to be symmetric if one and the same key is used for encryption and
decryption. For symmetric systems, the question of key distribution is
central: How can Alice and Bob agree on a joint secret key if they can
communicate only via an insecure channel? For example, if Alice chooses
some key and encrypts it like a message using a symmetric cryptosystem
to send it to Bob, then which key should she use to encrypt this key?
This paradoxical situation is known as the secret-key agreement problem, and it was considered unsolvable for a long time. Its surprisingly simple, ingenious solution by Whitfield Diffie and Martin Hellman in 1976 is a milestone in the history of cryptography. They proposed a protocol that Alice and Bob can use to exchange a few messages after which they both can easily determine their joint secret key. Eavesdropper Erich, however, does not have clue about their key, even if he was able to intercept every single bit of their transferred messages. Section 7.2 presents the Diffie-Hellman secret-key agreement protocol.
It may be considered an irony of history that this protocol, which finally solved the long-standing secret-key agreement problem that is so important in symmetric cryptography, opened the door to public-key cryptography in which there is no need to distribute joint secret keys via insecure channels. In 1978, shortly after Diffie and Hellman had published their pathbreaking work in 1976, Rivest, Shamir, and Adleman developed their famous RSA system, the first public-key cryptosystem in the open literature. Section 7.3 describes the RSA cryptosystem and the related digital signature scheme. Using the latter protocol, Alice can sign her message to Bob such that he can verify that she indeed is the sender of the message. Digital signatures prevent Erich from forging Alice's messages.
The security of the Diffie-Hellman protocol rests on the assumption that computing discrete logarithms is computationally intractable. That is why modular exponentiation (the inverse function of which is the discrete logarithm) is considered to be a candidate of a one-way function. The security of RSA similarly rests on the assumption that a certain problem is computationally intractable, namely on the assumption that factoring large integers is computationally hard. However, the authorised receiver Bob is able to efficiently decrypt the ciphertext by employing the factorisation of some integer he has chosen in private, which is his private “trapdoor” information.
Section 7.4 introduces a secret-key agreement protocol developed by Rivest and Sherman, which is based on so-called strongly noninvertible associative one-way functions. This protocol can be modified to yield a digital signature scheme as well.
Section 7.5 introduces the fascinating area of interactive proof systems and zero-knowledge protocols that has practical applications in cryptography, especially for authentication issues. In particular, a zero-knowledge protocol for the graph isomorphism problem is presented. On the other hand, this area is also central to complexity theory and will be revisited in Chapter 8, again in connection to the graph isomorphism problem.
Cryptography is the art and science of designing secure cryptosystems, which are used to encrypt texts and messages so that they be kept secret and unauthorised decryption is prevented, whereas the authorised receiver is able to efficiently decrypt the ciphertext received. This section presents two classical symmetric cryptosystems. In subsequent sections, some important asymmetric cryptosystems and cryptographic protocols are introduced. A “protocol” is dialog between two (or more) parties, where a “party” may be either a human being or a computing machine. Cryptographic protocols can have various cryptographic purposes. They consist of algorithms that are jointly executed by more than one party.
Cryptanalysis is the art and science of (unauthorised) decryption of ciphertexts and of breaking existing cryptosystems. Cryptology captures both these fields, cryptography and cryptanalysis. In this chapter, we focus on cryptographic algorithms. Algorithms of cryptanalysis, which are used to break cryptographic protocols and systems, will be mentioned as well but will not be investigated in detail.
Figure 7.1 shows a typical scenario in cryptography: Alice and Bob communicate over an insecure channel that is eavesdropped by Erich, and thus they encrypt their messages using a cryptosystem.
Definition 7.1 (Cryptosystem) A cryptosystem is a quintuple  with the following properties:
with the following properties:
1.  ,
,  , and
, and  are finite sets, where
are finite sets, where  is the plaintext space,
is the plaintext space,  is the ciphertext space, and
is the ciphertext space, and  is the key space. The elements of
is the key space. The elements of  are called the plaintexts, and the elements of
are called the plaintexts, and the elements of  are called the ciphertexts. A message is a string of plaintext symbols.
are called the ciphertexts. A message is a string of plaintext symbols.
2.  is a family of functions
is a family of functions  , which are used for encryption.
, which are used for encryption.  is a family of functions
is a family of functions  , which are used for decryption.
, which are used for decryption.
3. For each key  , there exists some key
, there exists some key  such that for each plaintext
such that for each plaintext  ,
,

A cryptosystem is said to be symmetric (or private-key) if either  or if
or if  at least can “easily” be determined from
at least can “easily” be determined from  . A cryptosystem is said to be asymmetric (or public-key) if
. A cryptosystem is said to be asymmetric (or public-key) if  and it is “computationally infeasible” to determine the private key
and it is “computationally infeasible” to determine the private key  from the corresponding public key
from the corresponding public key  .
.
At times, we may use distinct key spaces for encryption and decryption, with the above definition modified accordingly.
We now introduce some easy examples of classical symmetric cryptosystems. Consider the alphabet  , which will be used both for the plaintext space and for the ciphertext space. We identify
, which will be used both for the plaintext space and for the ciphertext space. We identify  with
with  so as to be able to perform calculations with letters as if they were numbers. The number
so as to be able to perform calculations with letters as if they were numbers. The number  corresponds to the letter
corresponds to the letter  , the
, the  corresponds to
corresponds to  ,
and so on. This coding of plaintext or ciphertext symbols by
nonnegative integers is not part of the actual encryption or decryption.
,
and so on. This coding of plaintext or ciphertext symbols by
nonnegative integers is not part of the actual encryption or decryption.
Messages are elements of  , where
, where  denotes the set of strings over
denotes the set of strings over  . If some message
. If some message  is subdivided into blocks of length
is subdivided into blocks of length  and is encrypted blockwise, as it is common in many cryptosystems, then each block of
and is encrypted blockwise, as it is common in many cryptosystems, then each block of  is viewed as an element of
is viewed as an element of  .
.
Example 7.1 [Shift Cipher] The first example is a monoalphabetic symmetric cryptosystem. Let  . The shift cipher encrypts messages by shifting every plaintext symbol by the same number
. The shift cipher encrypts messages by shifting every plaintext symbol by the same number  of letters in the alphabet modulo
of letters in the alphabet modulo  . Shifting each letter in the ciphertext back using the same key
. Shifting each letter in the ciphertext back using the same key  , the original plaintext is recovered. For each key
, the original plaintext is recovered. For each key  , the encryption function
, the encryption function  and the decryption function
and the decryption function  are defined by:
are defined by:
where addition and subtraction by  modulo
modulo  are carried out characterwise.
are carried out characterwise.

Figure 7.2 shows an encryption of the message  by the shift cipher with key
by the shift cipher with key  . The resulting ciphertext is
. The resulting ciphertext is  . Note that the particular shift cipher with key
. Note that the particular shift cipher with key  is also known as the Caesar cipher, since the Roman Emperor allegedly used this cipher during his wars to keep messages secret.
is also known as the Caesar cipher, since the Roman Emperor allegedly used this cipher during his wars to keep messages secret.
Footnote. Historic remark: Gaius Julius Caesar reports in his book De Bello Gallico
that he sent an encrypted message to Q. Tullius Cicero (the brother of
the famous speaker) during the Gallic Wars (58 until 50 B.C.). The
system used was monoalphabetic and replaced Latin letters by Greek
letters; however, it is not explicitly mentioned there if the cipher
used indeed was the shift cipher with key  . This information was given later by Suetonius.
. This information was given later by Suetonius.
This cipher is a very simple substitution cipher in which each letter is substituted by a certain letter of the alphabet.
Since the key space is very small, the shift cipher can easily be
broken. It is already vulnerable by attacks in which the attacker knows
the ciphertext only, simply by checking which of the  possible keys reveals a meaningful plaintext, provided that the ciphertext is long enough to allow unique decryption.
possible keys reveals a meaningful plaintext, provided that the ciphertext is long enough to allow unique decryption.
The shift cipher is a monoalphabetic cryptosystem, since every plaintext letter is replaced by one and the same letter in the ciphertext. In contrast, a polyalphabetic cryptosystem can encrypt the same plaintext symbols by different ciphertext symbols, depending on their position in the text. Such a polyalphabetic cryptosystem that is based on the shift cipher, yet much harder to break, was proposed by the French diplomat Blaise de Vigenére (1523 until 1596). His system builds on previous work by the Italian mathematician Leon Battista Alberti (born in 1404), the German abbot Johannes Trithemius (born in 1492), and the Italian scientist Giovanni Porta (born in 1675). It works like the shift cipher, except that the letter that encrypts some plaintext letter varies with its position in the text.
Example 7.2 [Vigenére Cipher] This symmetric polyalphabetic cryptosystem uses a so-called Vigenére square, a matrix consisting of  rows and
rows and  columns, see Figure 7.3. Every row has the
columns, see Figure 7.3. Every row has the  letters of the alphabet, shifted from row to row by one position. That
is, the single rows can be seen as a shift cipher obtained by the keys
letters of the alphabet, shifted from row to row by one position. That
is, the single rows can be seen as a shift cipher obtained by the keys  . Which row of the Vigenére square is used for encryption of some plaintext symbol depends on its position in the text.
. Which row of the Vigenére square is used for encryption of some plaintext symbol depends on its position in the text.
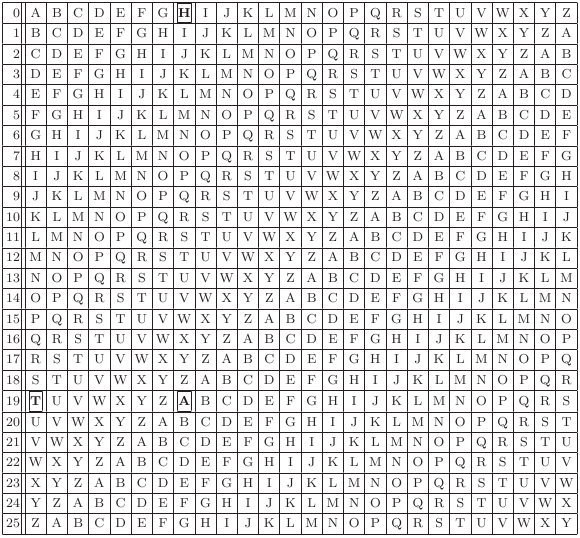
Messages are subdivided into blocks of a fixed length  and are encrypted blockwise, i.e.,
and are encrypted blockwise, i.e.,  . The block length
. The block length  is also called the period of the system. In what follows, the
is also called the period of the system. In what follows, the  th symbol in a string
th symbol in a string  is denoted by
is denoted by  .
.
For each key  , the encryption function
, the encryption function  and the decryption function
and the decryption function  , both mapping from
, both mapping from  to
to  , are defined by:
, are defined by:
where addition and subtraction by  modulo
modulo  are again carried out characterwise. That is, the key
are again carried out characterwise. That is, the key  is written letter by letter above the symbols of the block
is written letter by letter above the symbols of the block  to be encrypted. If the last plaintext block has less than
to be encrypted. If the last plaintext block has less than  symbols, one uses less key symbols accordingly. In order to encrypt the
symbols, one uses less key symbols accordingly. In order to encrypt the  th plaintext symbol
th plaintext symbol  , which has the key symbol
, which has the key symbol  sitting on top, use the
sitting on top, use the  th row of the Vigenére square as in the shift cipher.
th row of the Vigenére square as in the shift cipher.

For example, choose the block length  and the key
and the key  . Figure 7.4 shows the encryption of the message
. Figure 7.4 shows the encryption of the message  , which consists of seven blocks, into the ciphertext
, which consists of seven blocks, into the ciphertext  by the Vigenére cipher using key
by the Vigenére cipher using key  .
To the first plaintext letter, “H”, the key symbol “T” is assigned. The
intersection of the “H” column with the “T” row of the Vigenére square
yields “A” as the first letter of the ciphertext, see Figure 7.3.
.
To the first plaintext letter, “H”, the key symbol “T” is assigned. The
intersection of the “H” column with the “T” row of the Vigenére square
yields “A” as the first letter of the ciphertext, see Figure 7.3.
There are many other classical cryptosystems, which will not be described in detail here. There are various ways to classify cryptosystems according to their properties or to the specific way they are designed. In Definition 7.1, the distinction between symmetric and asymmetric cryptosystems was explained. The two examples above (the shift cipher and the Vigenére cipher) demonstrated the distinction between monoalphabetic and polyalphabetic systems. Both are substitution ciphers, which may be contrasted with permutation ciphers (a.k.a. transposition ciphers) in which the plaintext letters are not substituted by certain ciphertext letters but go to another position in the text remaining otherwise unchanged.
Moreover, block ciphers such as the Vigenére system can be contrasted with stream ciphers,
which produce a continuous stream of key symbols depending on the
plaintext context to be encrypted. One can also distinguish between
different types of block ciphers. An important type are the affine linear block ciphers, which are defined by affine linear encryption functions  and decryption functions
and decryption functions  , both mapping from
, both mapping from  to
to  . That is, they are of the following form:
. That is, they are of the following form:

Here,  and
and  are the keys used for encryption and decryption, respectively;
are the keys used for encryption and decryption, respectively;  is a
is a  matrix with entries from
matrix with entries from  ;
;  is the inverse matrix for
is the inverse matrix for  ;
;  ,
,  , and
, and  are vectors in
are vectors in  , and all arithmetics is carried out modulo
, and all arithmetics is carried out modulo  . Some mathematical explanations are in order (see also Definition 7.2 in Subsection 7.1.3): An
. Some mathematical explanations are in order (see also Definition 7.2 in Subsection 7.1.3): An  matrix
matrix  over the ring
over the ring  has a multiplicative inverse if and only if
has a multiplicative inverse if and only if  . The inverse matrix for
. The inverse matrix for  is defined by
is defined by  , where
, where  is the determinant of
is the determinant of  , and
, and  is the adjunct matrix for
is the adjunct matrix for  . The determinant
. The determinant  of
of  is recursively defined: For
is recursively defined: For  and
and  ,
,  ; for
; for  and each
and each  ,
,  , where
, where  denotes the
denotes the  entry of
entry of  and the
and the  matrix
matrix  results from
results from  by cancelling the
by cancelling the  th row and the
th row and the  th column. The determinant of a matrix and thus its inverse (if it exists) can be computed efficiently, see Problem 7-3.
th column. The determinant of a matrix and thus its inverse (if it exists) can be computed efficiently, see Problem 7-3.
For example, the Vigenére cipher is an affine linear cipher whose key contains the unity matrix as its first component. If  in (7.2) is the zero vector, then it is a linear block cipher. A classical example is the Hill cipher, invented by Lester Hill in 1929. Here, the key space is the set of all
in (7.2) is the zero vector, then it is a linear block cipher. A classical example is the Hill cipher, invented by Lester Hill in 1929. Here, the key space is the set of all  matrices
matrices  with entries in
with entries in  such that
such that  . This condition guarantees the invertibility of those matrices that are allowed as keys, since the inverse matrix
. This condition guarantees the invertibility of those matrices that are allowed as keys, since the inverse matrix  is used for decryption of the messages encrypted by key
is used for decryption of the messages encrypted by key  . For each key
. For each key  , the Hill cipher is defined by the encryption function
, the Hill cipher is defined by the encryption function  and the decryption function
and the decryption function  .
Thus, it is the most general linear cipher. The permutation cipher also
is linear, and hence is a special case of the Hill cipher.
.
Thus, it is the most general linear cipher. The permutation cipher also
is linear, and hence is a special case of the Hill cipher.
Cryptanalysis aims at breaking existing cryptosystems and, in particular, at determining the decryption keys. In order to characterise the security or vulnerability of the cryptosystem considered, one distinguishes different types of attacks according to the information available for the attacker. For the shift cipher, ciphertext-only attacks were already mentioned. They are the weakest type of attack, and a cryptosystem that does not resist such attacks is not of much value.
Affine linear block ciphers such as the Vigenére and the Hill cipher are vulnerable to attacks in which the attacker knows the plaintext corresponding to some ciphertext obtained and is able to conclude the keys used. These attacks are called known-plaintext attacks. Affine linear block ciphers are even more vulnerable to chosen-plaintext attacks, in which the attacker can choose some plaintext and is then able to see which ciphertext corresponds to the plaintext chosen. Another type of attack is in particular relevant for asymmetric cryptosystems: In an encryption-key attack, the attacker merely knows the public key but does not know any ciphertext yet, and seeks to determine the private key from this information. The difference is that the attacker now has plenty of time to perform computations, whereas in the other types of attacks the ciphertext was already sent and much less time is available to decrypt it. That is why keys of much larger size are required in public-key cryptography to guarantee the security of the system used. Hence, asymmetric cryptosystems are much less efficient than symmetric cryptosystems in many practical applications.
For the attacks mentioned above, the method of frequency counts is
often useful. This method exploits the redundancy of the natural
language used. For example, in many natural languages, the letter “E”
occurs statistically significant most frequently. On average, the “E”
occurs in long, “typical” texts with a percentage of  in English, of
in English, of  in French, and even of
in French, and even of  in German. In other languages, different letters may occur most
frequently. For example, the “A” is the most frequent letter in long,
“typical” Finnish texts, with a percentage of
in German. In other languages, different letters may occur most
frequently. For example, the “A” is the most frequent letter in long,
“typical” Finnish texts, with a percentage of  .
.
That the method of frequency counts is useful for attacks on
monoalphabetic cryptosystems is obvious. For example, if in a
ciphertext encrypting a long German text by the shift cipher, the
letter occurring most frequently is “Y”, which is rather rare in German
(as well as in many other languages), then it is most likely that “Y”
encrypts “E”. Thus, the key used for encryption is “U” ( ).
In addition to counting the frequency of single letters, one can also
count the frequency with which certain pairs of letters (so-called
digrams) and triples of letters (so-called trigrams) occur, and so on.
This kind of attack also works for polyalphabetic systems, provided the
period (i.e., the block length) is known.
).
In addition to counting the frequency of single letters, one can also
count the frequency with which certain pairs of letters (so-called
digrams) and triples of letters (so-called trigrams) occur, and so on.
This kind of attack also works for polyalphabetic systems, provided the
period (i.e., the block length) is known.
Polyalphabetic cryptosystems with an unknown period, however, provide more security. For example, the Vigenére cipher resisted each attempt of breaking it for a long time. No earlier than in 1863, about 300 years after its discovery, the German cryptanalyst Friedrich Wilhelm Kasiski found a method of breaking the Vigenére cipher. He showed how to determine the period, which initially is unknown, from repetitions of the same substring in the ciphertext. Subsequently, the ciphertext can be decrypted by means of frequency counts. Singh writes that the British eccentric Charles Babbage, who was considered a genius of his time by many, presumably had discovered Kasiski's method even earlier, around 1854, although he didn't publish his work.
The pathbreaking work of Claude Shannon (1916 until 2001), the
father of modern coding and information theory, is now considered a
milestone in the history of cryptography. Shannon proved that there
exist cryptosystems that guarantee perfect secrecy in a mathematically
rigorous sense. More precisely, a cryptosystem  guarantees perfect secrecy if and only if
guarantees perfect secrecy if and only if  , the keys in
, the keys in  are uniformly distributed, and for each plaintext
are uniformly distributed, and for each plaintext  and for each ciphertext
and for each ciphertext  there exists exactly one key
there exists exactly one key  with
with  .
That means that such a cryptosystem often is not useful for practical
applications, since in order to guarantee perfect secrecy, every key
must be at least as long as the message to be encrypted and can be used
only once.
.
That means that such a cryptosystem often is not useful for practical
applications, since in order to guarantee perfect secrecy, every key
must be at least as long as the message to be encrypted and can be used
only once.
In order to understand some of the algorithms and problems to be presented later, some fundamental notions, definitions, and results from algebra and, in particular, from number theory, group theory, and graph theory are required. This concerns both the cryptosystems and zero-knowledge protocols in Chapter 7 and some of the problems to be considered in upcoming Chapter 8. The present subsection may as well be skipped for now and revisited later when the required notions and results come up. In this section, most of the proofs are omitted.
Definition 7.2 (Group, ring, and field)
 A group
A group  is defined by some nonempty set
is defined by some nonempty set  and a two-ary operation
and a two-ary operation  on
on  that satisfy the following axioms:
that satisfy the following axioms:
– Closure:  .
.
– Associativity:  .
.
– Neutral element:  .
.
– Inverse element:  .
.
The element  is called the neutral element of the group
is called the neutral element of the group  . The element
. The element  is called the inverse element for
is called the inverse element for  .
.  is said to be a monoid if
is said to be a monoid if  satisfies associativity and closure under
satisfies associativity and closure under  , even if
, even if  has no neutral element or if not every element in
has no neutral element or if not every element in  has an inverse. A group
has an inverse. A group  (respectively, a monoid
(respectively, a monoid  ) is said to be commutative (or abelian) if and only if
) is said to be commutative (or abelian) if and only if  for all
for all  . The number of elements of a finite group
. The number of elements of a finite group  is said to be the order
is said to be the order  and is denoted by
and is denoted by  .
.

 is said to be a subgroup of a group
is said to be a subgroup of a group  (denoted by
(denoted by  ) if and only if
) if and only if  and
and  satisfies the group axioms.
satisfies the group axioms.
 A ring is a triple
A ring is a triple  such that
such that  is an abelian group and
is an abelian group and  is a monoid and the distributive laws are satisfied:
is a monoid and the distributive laws are satisfied:


A ring  is said to be commutative if and only if the monoid
is said to be commutative if and only if the monoid  is commutative. The neutral element group
is commutative. The neutral element group  is called the zero element (the zero, for short) of the ring
is called the zero element (the zero, for short) of the ring  . A neutral element of the monoid
. A neutral element of the monoid  is called the one element (the one, for short) of the ring
is called the one element (the one, for short) of the ring  .
.
 Let
Let  be a ring with one. An element
be a ring with one. An element  of
of  is said to be invertible (or a unity of
is said to be invertible (or a unity of  ) if and only if it is invertible in the monoid
) if and only if it is invertible in the monoid  .
.
 A field is a commutative ring with one in which each nonzero element is invertible.
A field is a commutative ring with one in which each nonzero element is invertible.
Example 7.3 (Group, ring, and field)
 Let
Let  . The set
. The set  is a finite group with respect to addition modulo
is a finite group with respect to addition modulo  , with neutral element
, with neutral element  . With respect to addition and multiplication modulo
. With respect to addition and multiplication modulo  ,
,  is a commutative ring with one, see Problem 7-1. If
is a commutative ring with one, see Problem 7-1. If  is a prime number, then
is a prime number, then  is a field with respect to addition and multiplication modulo
is a field with respect to addition and multiplication modulo  .
.
 Let
Let  denote the greatest common divisor of two integers
denote the greatest common divisor of two integers  and
and  . For
. For  , define the set
, define the set  . With respect to multiplication modulo
. With respect to multiplication modulo  ,
,  is a finite group with neutral element
is a finite group with neutral element  .
.
If the operation  of a group
of a group  is clear from the context, we omit stating it explicitly. The group
is clear from the context, we omit stating it explicitly. The group  from Example 7.3 will play a particular role in Section7.3, where the RSA cryptosystem is introduced. The Euler function
from Example 7.3 will play a particular role in Section7.3, where the RSA cryptosystem is introduced. The Euler function  gives the order of this group, i.e.,
gives the order of this group, i.e.,  . The following properties of
. The following properties of  follow from the definition:
follow from the definition:
-
 for all
for all  with
with  , and
, and -
 for all prime numbers
for all prime numbers  .
.
The proof of these properties is left to the reader as Exercise 7.1-2. In particular, we will apply the following fact in Subsection 7.3.1, which is a consequence of the properties above.
Claim 7.3 If  for prime numbers
for prime numbers  and
and  , then
, then  .
.
Euler's Theorem below is a special case (namely, for the group  ) of Lagrange's Theorem, which says that for each group element
) of Lagrange's Theorem, which says that for each group element  of a finite multiplicative group
of a finite multiplicative group  of order
of order  and with neutral element
and with neutral element  ,
,  . The special case of Euler's theorem, where
. The special case of Euler's theorem, where  is a prime number not dividing
is a prime number not dividing  , is known as Fermat's Little Theorem.
, is known as Fermat's Little Theorem.
Theorem 7.4 (Euler) For each  ,
,  .
.
Corollary 7.5 (Fermat's Little Theorem) If  is a prime number and
is a prime number and  , then
, then  .
.
In Section 8.4, algorithms for the graph isomorphism problem will be presented. This problem, which also is related to the zero-knowledge protocols to be introduced in Subsection 7.5.2, can be seen as a special case of certain group-theoretic problems. In particular, permutation groups are of interest here. Some examples for illustration will be presented later.
Definition 7.6 (Permutation group)
 A permutation is a bijective mapping of a set onto itself. For each integer
A permutation is a bijective mapping of a set onto itself. For each integer  , let
, let  . The set of all permutations of
. The set of all permutations of  is denoted by
is denoted by  . For algorithmic purposes, permutations
. For algorithmic purposes, permutations  are given as pairs
are given as pairs  from
from  .
.
 If one defines the composition of permutations as an operation on
If one defines the composition of permutations as an operation on  , then
, then  becomes a group. For two permutations
becomes a group. For two permutations  and
and  in
in  , their composition
, their composition  is defined to be that permutation in
is defined to be that permutation in  that results from first applying
that results from first applying  and then
and then  to the elements of
to the elements of  , i.e.,
, i.e.,  for each
for each  . The neutral element of the permutation group
. The neutral element of the permutation group  is the identical permutation, which is defined by
is the identical permutation, which is defined by  for each
for each  . The subgroup of
. The subgroup of  that contains
that contains  as its only element is denoted by
as its only element is denoted by  .
.
 For any subset
For any subset  of
of  , the permutation group
, the permutation group  generated by
generated by  is defined as the smallest subgroup of
is defined as the smallest subgroup of  containing
containing  . Subgroups
. Subgroups  of
of  are represented by their generating sets, sometimes dubbed the generators of
are represented by their generating sets, sometimes dubbed the generators of  . In
. In  , the orbit of an element
, the orbit of an element  is defined as
is defined as  .
.
 For any subset
For any subset  of
of  , let
, let  denote the subgroup of
denote the subgroup of  that maps every element of
that maps every element of  onto itself. In particular, for
onto itself. In particular, for  and a subgroup
and a subgroup  of
of  , the (pointwise) stabiliser of
, the (pointwise) stabiliser of  in
in  is defined by
is defined by

Observe that  and
and  .
.
 Let
Let  and
and  be permutation groups with
be permutation groups with  . For
. For  ,
,  is said to be a right coset of
is said to be a right coset of  in
in  . Any two right cosets of
. Any two right cosets of  in
in  are either identical or disjoint. Thus, the permutation group
are either identical or disjoint. Thus, the permutation group  is partitioned by the right cosets of
is partitioned by the right cosets of  in
in  :
:

Every right coset of  in
in  has the cardinality
has the cardinality  . The set
. The set  in (7.3) is called the complete right transversal of
in (7.3) is called the complete right transversal of  in
in  .
.
The notion of pointwise stabilisers is especially important for the
design of algorithms solving problems on permutation groups. The
crucial structure exploited there is the so-called tower of stabilisers of a permutation group  :
:

For each  with
with  , let
, let  be the complete right transversal of
be the complete right transversal of  in
in  . Then,
. Then,  is said to be a strong generator of
is said to be a strong generator of  , and we have
, and we have  . Every
. Every  then has a unique factorisation
then has a unique factorisation  with
with  . The following basic algorithmic results about permutation groups will be useful later in Section 8.4.
. The following basic algorithmic results about permutation groups will be useful later in Section 8.4.
Theorem 7.7 Let a permutation group  be given by a generator. Then, we have:
be given by a generator. Then, we have:
1. For each  , the orbit
, the orbit  of
of  in
in  can be computed in polynomial time.
can be computed in polynomial time.
2. The tower of stabilisers  can be computed in time polynomially in
can be computed in time polynomially in  , i.e., for each
, i.e., for each  with
with  , the complete right transversals
, the complete right transversals  of
of  in
in  and thus a strong generator of
and thus a strong generator of  can be determined efficiently.
can be determined efficiently.
The notions introduced in Definition 7.6 for permutation groups are now explained for concrete examples from graph theory. In particular, we consider the automorphism group and the set of isomorphisms between graphs. We start by introducing some useful graph-theoretical concepts.
Definition 7.8 (Graph isomorphism and graph automorphism) A graph  consists of a finite set of vertices,
consists of a finite set of vertices,  , and a finite set of edges,
, and a finite set of edges,  ,
that connect certain vertices with each other. We assume that no
multiple edges and no loops occur. In this chapter, we consider only
undirected graphs, i.e., the edges are not oriented and can be seen as
unordered vertex pairs. The disjoint union
,
that connect certain vertices with each other. We assume that no
multiple edges and no loops occur. In this chapter, we consider only
undirected graphs, i.e., the edges are not oriented and can be seen as
unordered vertex pairs. The disjoint union  of two graphs
of two graphs  and
and  is defined as the graph with vertex set
is defined as the graph with vertex set  and edge set
and edge set  , where we assume that that the vertex sets
, where we assume that that the vertex sets  and
and  are made disjoint (by renaming if necessary).
are made disjoint (by renaming if necessary).
Let  and
and  be two graphs with the same number of vertices. An isomorphism between
be two graphs with the same number of vertices. An isomorphism between  and
and  is an edge-preserving bijection of the vertex set of
is an edge-preserving bijection of the vertex set of  onto that of
onto that of  . Under the convention that
. Under the convention that  ,
,  and
and  are isomorphic (
are isomorphic ( , for short) if and only if there exists a permutation
, for short) if and only if there exists a permutation  such that for all vertices
such that for all vertices  ,
,

An automorphism of  is an edge-preserving bijection of the vertex set of
is an edge-preserving bijection of the vertex set of  onto itself. Every graph has the trivial automorphism
onto itself. Every graph has the trivial automorphism  . By
. By  we denote the set of all isomorphisms between
we denote the set of all isomorphisms between  and
and  , and by
, and by  we denote the set of all automorphisms of
we denote the set of all automorphisms of  . Define the problems graph automorphism (
. Define the problems graph automorphism ( , for short) and graph automorphism (
, for short) and graph automorphism ( , for short) by:
, for short) by:

For
algorithmic purposes, graphs are represented either by their vertex and
edge lists or by an adjacency matrix, which has the entry  at position
at position  if
if  is an edge, and the entry
is an edge, and the entry  otherwise. This graph representation is suitably encoded over the alphabet
otherwise. This graph representation is suitably encoded over the alphabet  . In order to represent pairs of graphs, we use a standard bijective pairing function
. In order to represent pairs of graphs, we use a standard bijective pairing function  from
from  onto
onto  that is polynomial-time computable and has polynomial-time computable inverses.
that is polynomial-time computable and has polynomial-time computable inverses.
Example 7.4 (Graph isomorphism and graph automorphism) The graphs  and
and  shown in Figure 7.5 are isomorphic.
shown in Figure 7.5 are isomorphic.
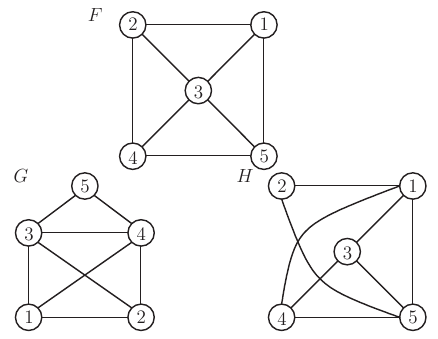
An isomorphism  preserving adjacency of the vertices according to (7.4) is given, e.g., by
preserving adjacency of the vertices according to (7.4) is given, e.g., by  , or in cycle notation by
, or in cycle notation by  . There are three further isomorphisms between
. There are three further isomorphisms between  and
and  , i.e.,
, i.e.,  , see Exercise 7.1-4. However, neither
, see Exercise 7.1-4. However, neither  nor
nor  is isomorphic to
is isomorphic to  . This is immediately seen from the fact that the sequence of vertex degrees (the number of edges fanning out of each vertex) of
. This is immediately seen from the fact that the sequence of vertex degrees (the number of edges fanning out of each vertex) of  and
and  , respectively, differs from the sequence of vertex degrees of
, respectively, differs from the sequence of vertex degrees of  : For
: For  and
and  , this sequence is
, this sequence is  , whereas it is
, whereas it is  for
for  . A nontrivial automorphism
. A nontrivial automorphism  of
of  is given, e.g., by
is given, e.g., by  , or
, or  ; another one by
; another one by  , or
, or  . There are two more automorphisms of
. There are two more automorphisms of  , i.e.,
, i.e.,  , see Exercise 7.1-4.
, see Exercise 7.1-4.
The permutation groups  ,
,  , and
, and  are subgroups of
are subgroups of  . The tower
. The tower  of stabilisers of
of stabilisers of  consists of the subgroups
consists of the subgroups  ,
,  , and
, and  . In the automorphism group
. In the automorphism group  of
of  , the vertices
, the vertices  and
and  have the orbit
have the orbit  , the vertices
, the vertices  and
and  have the orbit
have the orbit  , and vertex
, and vertex  has the orbit
has the orbit  .
.
 and
and  have the same number of elements if and only if
have the same number of elements if and only if  and
and  are isomorphic. To wit, if
are isomorphic. To wit, if  and
and  are isomorphic, then
are isomorphic, then  follows from
follows from  . Otherwise, if
. Otherwise, if  , then
, then  is empty but
is empty but  contains always the trivial automorphism
contains always the trivial automorphism  . This implies (7.5) in Lemma 7.9 below, which we will need later in Section 8.4. For proving (7.6), suppose that
. This implies (7.5) in Lemma 7.9 below, which we will need later in Section 8.4. For proving (7.6), suppose that  and
and  are connected; otherwise, we simply consider instead of
are connected; otherwise, we simply consider instead of  and
and  the co-graphs
the co-graphs  and
and  , see Exercise 7.1-5. An automorphism of
, see Exercise 7.1-5. An automorphism of  that switches the vertices of
that switches the vertices of  and
and  , consists of an isomorphism in
, consists of an isomorphism in  and an isomorphism in
and an isomorphism in  . Thus,
. Thus,  , which implies (7.6) via (7.5).
, which implies (7.6) via (7.5).
Lemma 7.9 For any two graphs  and
and  , we have
, we have


If  and
and  are isomorphic graphs and if
are isomorphic graphs and if  , then
, then  . Thus,
. Thus,  is a right coset of
is a right coset of  in
in  . Since any two right cosets are either identical or disjoint,
. Since any two right cosets are either identical or disjoint,  can be partitioned into right cosets of
can be partitioned into right cosets of  according to (7.3):
according to (7.3):

where  for all
for all  ,
,  . The set
. The set  of permutations in
of permutations in  thus is a complete right transversal of
thus is a complete right transversal of  in
in  . Denoting by
. Denoting by  the graph
the graph  that results from applying the permutation
that results from applying the permutation  to the vertices of
to the vertices of  , we have
, we have  . Since there are exactly
. Since there are exactly  permutations in
permutations in  , it follows from (7.7) that
, it follows from (7.7) that

This proves the following corollary.
Corollary 7.10 If  is a graph with
is a graph with  vertices, then there are exactly
vertices, then there are exactly  graphs isomorphic to
graphs isomorphic to  .
.
For the graph  in Figure 7.5 from Example 7.4, there thus exist exactly
in Figure 7.5 from Example 7.4, there thus exist exactly  isomorphic graphs. The following lemma will be used later in Section 8.4.
isomorphic graphs. The following lemma will be used later in Section 8.4.
Lemma 7.11 Let  and
and  be two graphs with
be two graphs with  vertices. Define the set
vertices. Define the set

Then, we have

Proof. If  and
and  are isomorphic, then
are isomorphic, then  . Hence, by Corollary 7.10, we have
. Hence, by Corollary 7.10, we have

Analogously, one can show that  . If
. If  and
and  are isomorphic, then
are isomorphic, then

It follows that  . If
. If  and
and  are nonisomorphic, then
are nonisomorphic, then  and
and  are disjoint sets. Thus,
are disjoint sets. Thus,  .
.
Exercises
7.1-1 Figure 7.6 shows two ciphertexts,  and
and  . It is known that both encrypt the same plaintext
. It is known that both encrypt the same plaintext  and that one was obtained using the shift cipher, the other one using the Vigenére cipher. Decrypt both ciphertexts.
and that one was obtained using the shift cipher, the other one using the Vigenére cipher. Decrypt both ciphertexts.
Hint. After decryption you will notice that the plaintext obtained is a true statement for one of the two ciphertexts, whereas it is a false statement for the other ciphertext. Is perhaps the method of frequency counts useful here?

7.1-2 Prove that  is a ring with respect to ordinary addition and multiplication. Is it
also a field? What can be said about the properties of the algebraic
structures
is a ring with respect to ordinary addition and multiplication. Is it
also a field? What can be said about the properties of the algebraic
structures  ,
,  , and
, and  ?
?
7.1-3 Prove the properties stated for Euler's  function:
function:
a.  for all
for all  with
with  .
.
b.  for all prime numbers
for all prime numbers  .
.
Using these properties, prove Proposition 7.3.
7.1-4 Consider the graphs  ,
,  , and
, and  from Figure 7.5 in Example 7.4.
from Figure 7.5 in Example 7.4.
a. Determine all isomorphisms between  and
and  .
.
b. Determine all automorphisms of  ,
,  , and
, and  .
.
c. For which isomorphisms between  and
and  is
is  a right coset of
a right coset of  in
in  , i.e., for which
, i.e., for which  is
is  ? Determine the complete right transversals of
? Determine the complete right transversals of  ,
,  , and
, and  in
in  .
.
d. Determine the orbit of all vertices of  in
in  and the orbit of all vertices of
and the orbit of all vertices of  in
in  .
.
e. Determine the tower of stabilisers of the subgroups  and
and  .
.
f. How many graphs with  vertices are isomorphic to
vertices are isomorphic to  ?
?
7.1-5 The co-graph  of a graph
of a graph  is defined by the vertex set
is defined by the vertex set  and the edge set
and the edge set  . Prove the following claims: a.
. Prove the following claims: a.  .
.
b.  .
.
c.  is connected if
is connected if  is not connected.
is not connected.
The basic number-theoretic facts presented in Subsection 7.1.3 will be needed in this and the subsequent sections. In particular, recall the multiplicative group  from Example 7.3 and Euler's
from Example 7.3 and Euler's  function. The arithmetics in remainder class rings will be explained at the end of this chapter, see Problem 7-1.
function. The arithmetics in remainder class rings will be explained at the end of this chapter, see Problem 7-1.
Figure 7.7 shows the Diffie-Hellman secret-key agreement protocol, which is based on exponentiation with base  and modulus
and modulus  , where
, where  is a prime number and
is a prime number and  is a primitive root of
is a primitive root of  . A primitive root of a number
. A primitive root of a number  is any element
is any element  such that
such that  for each
for each  with
with  . A primitive root
. A primitive root  of
of  generates the entire group
generates the entire group  , i.e.,
, i.e.,  . Recall that for any prime number
. Recall that for any prime number  the group
the group  has order
has order  .
.  has exactly
has exactly  primitive roots, see also Exercise 7.2-1.
primitive roots, see also Exercise 7.2-1.
Example 7.5 Consider  . Since
. Since  , we have
, we have  , and the two primitive roots of
, and the two primitive roots of  are
are  and
and  . Both
. Both  and
and  generate all of
generate all of  , since:
, since:

Not every number has a primitive root;  is the smallest such example. It is known that a number
is the smallest such example. It is known that a number  has a primitive root if and only if
has a primitive root if and only if  either is from
either is from  , or has the form
, or has the form  or
or  for some odd prime number
for some odd prime number  .
.
Definition 7.12 (Discrete logarithm) Let  be a prime number, and let
be a prime number, and let  be a primitive root of
be a primitive root of  . The modular exponential function with base
. The modular exponential function with base  and modulus
and modulus  is the function
is the function  that maps from
that maps from  to
to  , and is defined by
, and is defined by  . Its inverse function is called the discrete logarithm, and maps for fixed
. Its inverse function is called the discrete logarithm, and maps for fixed  and
and  the value
the value  to
to  . We write
. We write  .
.
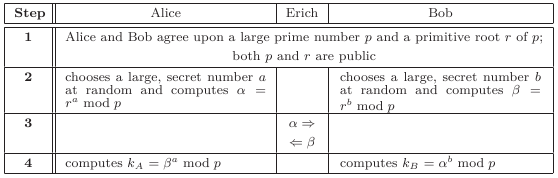
The protocol given in Figure 7.7 works, since (in the arithmetics modulo  )
)

so
Alice indeed computes the same key as Bob. Computing this key is not
hard, since modular exponentiation can be performed efficiently using
the square-and-multiply method from algorithm Square-and-Multiply.
Erich, however, has a hard time when he attempts to determine their
key, since the discrete logarithm is considered to be a hard problem.
That is why the modular exponential function  is a candidate of a one-way function,
a function that is easy to compute but hard to invert. Note that it is
not known whether or not one-way functions indeed exist; this is one of
the most challenging open research questions in cryptography. The
security of many cryptosystems rests on the assumption that one-way
functions indeed exist.
is a candidate of a one-way function,
a function that is easy to compute but hard to invert. Note that it is
not known whether or not one-way functions indeed exist; this is one of
the most challenging open research questions in cryptography. The
security of many cryptosystems rests on the assumption that one-way
functions indeed exist.
Square-and-Multiply(
)
1
is the modulus,
is the base, and
is the exponent 2 determine the binary expansion of the exponent
, where
3 compute successively
, where
, using that
4 compute
in the arithmetics modulo
5
as soon as a factor
in the product and
are determined,

can be deleted and need not be stored 6
RETURN
Why can the modular exponential function  be computed efficiently? Naively performed, this computation may
require many multiplications, depending on the size of the exponent
be computed efficiently? Naively performed, this computation may
require many multiplications, depending on the size of the exponent  . However, using algorithm
. However, using algorithm Square-and-Multiply there is no need to perform  multiplications as in the naive approach; no more than
multiplications as in the naive approach; no more than  multiplications suffice. The square-and-multiply algorithm thus speeds modular exponentiation up by an exponential factor.
multiplications suffice. The square-and-multiply algorithm thus speeds modular exponentiation up by an exponential factor.
Note that in the arithmetics modulo  , we have
, we have
Thus, the algorithm Square-and-Multiply is correct.
Example 7.6 [Square-and-Multiply in the Diffie-Hellman Protocol] Alice and Bob have chosen the prime number  and the primitive root
and the primitive root  of
of  . Alice picks the secret number
. Alice picks the secret number  . In order to send her public number
. In order to send her public number  to Bob, Alice wishes to compute
to Bob, Alice wishes to compute  . The binary expansion of the exponent is
. The binary expansion of the exponent is  . Alice successively computes the values:
. Alice successively computes the values:

Then, she computes  . Note that Alice does not have to multiply
. Note that Alice does not have to multiply  times but merely performs four squarings and one multiplication to determine
times but merely performs four squarings and one multiplication to determine  .
.
Suppose that Bob has chosen the secret exponent  . By the same method, he can compute his part of the key,
. By the same method, he can compute his part of the key,  . Now, Alice and Bob determine their joint secret key according to the Diffie-Hellman protocol from Figure 7.7; see Exercise 7.2-2.
. Now, Alice and Bob determine their joint secret key according to the Diffie-Hellman protocol from Figure 7.7; see Exercise 7.2-2.
Note that the protocol is far from being secure in this case, since the prime number  and the secret exponents
and the secret exponents  and
and  are much too small. This toy example was chosen just to explain how the protocol works. In practice,
are much too small. This toy example was chosen just to explain how the protocol works. In practice,  and
and  should have at least
should have at least  bits each.
bits each.
If Erich was listening very careful, he knows the values  ,
,  ,
,  , and
, and  after Alice and Bob have executed the protocol. His aim is to determine their joint secret key
after Alice and Bob have executed the protocol. His aim is to determine their joint secret key  . This problem is known as the Diffie-Hellman problem. If Erich were able to determine
. This problem is known as the Diffie-Hellman problem. If Erich were able to determine  and
and  efficiently, he could compute the key
efficiently, he could compute the key  just like Alice and Bob and thus would have solved the Diffie-Hellman
problem. Thus, this problem is no harder than the problem of computing
discrete logarithms. The converse question of whether or not the
Diffie-Hellman problem is at least
as hard as solving the discrete logarithm (i.e., whether or not the two
problems are equally hard) is still just an unproven conjecture. As
many other cryptographic protocols, the Diffie-Hellman protocol
currently has no proof of security.
just like Alice and Bob and thus would have solved the Diffie-Hellman
problem. Thus, this problem is no harder than the problem of computing
discrete logarithms. The converse question of whether or not the
Diffie-Hellman problem is at least
as hard as solving the discrete logarithm (i.e., whether or not the two
problems are equally hard) is still just an unproven conjecture. As
many other cryptographic protocols, the Diffie-Hellman protocol
currently has no proof of security.
However, since up to date neither the discrete logarithm nor the
Diffie-Hellman problem can be solved efficiently, this direct attack is
not a practical threat. On the other hand, there do exist other,
indirect attacks in which the key is determined not immediately from
the values  and
and  communicated in the Diffie-Hellman protocol. For example, Diffie-Hellman is vulnerable by the “man-in-the-middle” attack. Unlike the passive attack described above, this attack is active,
since the attacker Erich aims at actively altering the protocol to his
own advantage. He is the “man in the middle” between Alice and Bob, and
he intercepts Alice's message
communicated in the Diffie-Hellman protocol. For example, Diffie-Hellman is vulnerable by the “man-in-the-middle” attack. Unlike the passive attack described above, this attack is active,
since the attacker Erich aims at actively altering the protocol to his
own advantage. He is the “man in the middle” between Alice and Bob, and
he intercepts Alice's message  to Bob and Bob's message
to Bob and Bob's message  to Alice. Instead of
to Alice. Instead of  and
and  , he forwards his own values
, he forwards his own values  to Bob and
to Bob and  to Alice, where the private numbers
to Alice, where the private numbers  and
and  were chosen by Erich. Now, if Alice computes her key
were chosen by Erich. Now, if Alice computes her key  , which she falsely presumes to share with Bob,
, which she falsely presumes to share with Bob,  in fact is a key for future communications with Erich, who determines the same key by computing (in the arithmetics modulo
in fact is a key for future communications with Erich, who determines the same key by computing (in the arithmetics modulo  )
)

Similarly, Erich can share a key with Bob, who has not the slightest idea that he in fact communicates with Erich. This raised the issue of authentication, which we will deal with in more detail later in Section 7.5 about zero-knowledge protocols.
Exercises
7.2-1 a. How many primitive roots do  and
and  have?
have?
b. Determine all primitive roots of  and
and  , and prove that they indeed are primitive roots.
, and prove that they indeed are primitive roots.
c. Show that every primitive root of  and of
and of  , respectively, generates all of
, respectively, generates all of  and
and  .
.
7.2-2 a. Determine Bob's number  from Example 7.6 using the algorithm
from Example 7.6 using the algorithm Square-and-Multiply.
b. For  and
and  from Example 7.6, determine the joint secret key of Alice and Bob according to the Diffie-Hellman protocol from Figure 7.7.
from Example 7.6, determine the joint secret key of Alice and Bob according to the Diffie-Hellman protocol from Figure 7.7.
The RSA cryptosystem, which is named after its inventors Ron Rivest, Adi Shamir, and Leonard Adleman [214], is the first public-key cryptosystem. It is very popular still today and is used by various cryptographic applications. Figure 7.8 shows the single steps of the RSA protocol, which we will now describe in more detail, see also Example 7.7.
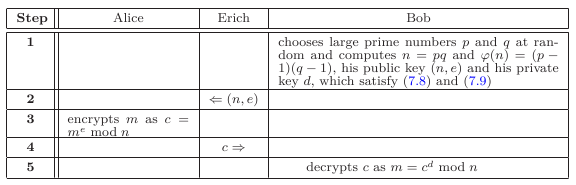
1. Key generation: Bob chooses two large prime numbers at random,  and
and  with
with  , and computes their product
, and computes their product  . He then chooses an exponent
. He then chooses an exponent  satisfying
satisfying

and computes the inverse of  , i.e., the unique number
, i.e., the unique number  such that
such that

The pair  is Bob's public key, and
is Bob's public key, and  is Bob's private key.
is Bob's private key.
2. Encryption: As in Section 7.1, messages are strings over an alphabet  . Any message is subdivided into blocks of a fixed length, which are encoded as positive integers in
. Any message is subdivided into blocks of a fixed length, which are encoded as positive integers in  -adic representation. These integers are then encrypted. Let
-adic representation. These integers are then encrypted. Let  be the number encoding some block of the message Alice wishes to send to Bob. Alice knows Bob's public key
be the number encoding some block of the message Alice wishes to send to Bob. Alice knows Bob's public key  and encrypts
and encrypts  as the number
as the number  , where the encryption function is defined by
, where the encryption function is defined by

3. Decryption: Let  with
with  be the number encoding one block of the ciphertext, which is received by Bob and also by the eavesdropper Erich. Bob decrypts
be the number encoding one block of the ciphertext, which is received by Bob and also by the eavesdropper Erich. Bob decrypts  by using his private key
by using his private key  and the following decryption function
and the following decryption function

Theorem 7.13 states that the RSA protocol described above indeed is a cryptosystems in the sense of Definition 7.1. The proof of Theorem 7.13 is left to the reader as Exercise 7.3-1.
Theorem 7.13 Let  be the public key and
be the public key and  be the private key in the RSA protocol. Then, for each message
be the private key in the RSA protocol. Then, for each message  with
with  ,
,

Hence, RSA is a public-key cryptosystem.
To make RSA encryption and (authorised) decryption efficient, the algorithm Square-and-Multiply algorithm is again employed for fast exponentiation.
How should one choose the prime numbers  and
and  in the RSA protocol? First of all, they must be large enough, since otherwise Erich would be able to factor the number
in the RSA protocol? First of all, they must be large enough, since otherwise Erich would be able to factor the number  in Bob's public key
in Bob's public key  using the extended Euclidean algorithm. Knowing the prime factors
using the extended Euclidean algorithm. Knowing the prime factors  and
and  of
of  , he could then easily determine Bob's private key
, he could then easily determine Bob's private key  , which is the unique inverse of
, which is the unique inverse of  , where
, where  . To keep the prime numbers
. To keep the prime numbers  and
and  secret, they thus must be sufficiently large. In practice,
secret, they thus must be sufficiently large. In practice,  and
and  should have at least
should have at least  digits each. To this end, one generates numbers of this size randomly
and then checks using one of the known randomised primality tests
whether the chosen numbers are primes indeed. By the Prime Number
Theorem, there are about
digits each. To this end, one generates numbers of this size randomly
and then checks using one of the known randomised primality tests
whether the chosen numbers are primes indeed. By the Prime Number
Theorem, there are about  prime numbers not exceeding
prime numbers not exceeding  . Thus, the odds are good to hit a prime after reasonably few trials.
. Thus, the odds are good to hit a prime after reasonably few trials.
In theory, the primality of  and
and  can be decided even in deterministic polynomial time. Agrawal et al. [2], [3] recently showed that the primality problem, which is defined by
can be decided even in deterministic polynomial time. Agrawal et al. [2], [3] recently showed that the primality problem, which is defined by

is a member of the complexity class P. Their breakthrough solved a longstanding open problem in complexity theory: Among a few other natural problems such as the graph isomorphism problem, the primality problem was considered to be one of the rare candidates of problems that are neither in P nor NP-complete.
Footnote. The complexity classes P and NP will be defined in Section 8.1 and the notion of NP-completeness will be defined in Section 8.2.
For practical purposes, however, the known randomised algorithms are
more useful than the deterministic algorithm by Agrawal et al. The
running time of  obtained in their original paper [2], [3] could be improved to
obtained in their original paper [2], [3] could be improved to  meanwhile, applying a more sophisticated analysis, but this running
time is still not as good as that of the randomised algorithms.
meanwhile, applying a more sophisticated analysis, but this running
time is still not as good as that of the randomised algorithms.
Miller-Rabin(
)
1 determine the representation, where
and
are odd 2 choose a number
at random under the uniform distribution 3 compute
4
IF5
THENRETURN“is a prime number” 6
ELSEFOR
TO7
DOIF8
THENRETURN“is a prime number” 9
ELSE10
RETURN“is not a prime number”
One of the most popular randomised primality tests is the algorithm Miller-Rabin developed by Rabin [209], which is based on the ideas underlying the deterministic algorithm of Miller [182].
The Miller-Rabin test is a so-called Monte Carlo algorithm, since the
“no” answers of the algorithm are always reliable, whereas its “yes”
answers have a certain error probability. An alternative to the
Miller-Rabin test is the primality test of Solovay and Strassen [246]. Both primality tests run in time  .
However, the Solovay-Strassen test is less popular because it is not as
efficient in practice and also less accurate than the Miller-Rabin test.
.
However, the Solovay-Strassen test is less popular because it is not as
efficient in practice and also less accurate than the Miller-Rabin test.
The class of problems solvable via Monte Carlo algorithms with always reliable “yes” answers is named RP, which stands for Randomised Polynomial Time. The complementary class,  ,
contains all those problems solvable via Monte Carlo algorithms with
always reliable “no” answers. Formally, RP is defined via
nondeterministic polynomial-time Turing machines (NPTMs, for short; see
Section 8.1 and in particular Definitions 8.1, 8.2, and 8.3) whose
computations are viewed as random processes: For each nondeterministic
guess, the machine flips an unbiased coin and follows each of the
resulting two next configurations with probability
,
contains all those problems solvable via Monte Carlo algorithms with
always reliable “no” answers. Formally, RP is defined via
nondeterministic polynomial-time Turing machines (NPTMs, for short; see
Section 8.1 and in particular Definitions 8.1, 8.2, and 8.3) whose
computations are viewed as random processes: For each nondeterministic
guess, the machine flips an unbiased coin and follows each of the
resulting two next configurations with probability  until a final configuration is reached. Depending on the number of
accepting computation paths of the given NPTM, one obtains a certain
acceptance probability for each input. Errors may occur. The definition
of RP requires that the error probability must be below the threshold
of
until a final configuration is reached. Depending on the number of
accepting computation paths of the given NPTM, one obtains a certain
acceptance probability for each input. Errors may occur. The definition
of RP requires that the error probability must be below the threshold
of  for an input to be accepted, and there must occur no error at all for an input to be rejected.
for an input to be accepted, and there must occur no error at all for an input to be rejected.
Definition 7.14 (Randomised polynomial time) The class RP consists of exactly those problems  for which there exists an NPTM
for which there exists an NPTM  such that for each input
such that for each input  , if
, if  then
then  accepts with probability at least
accepts with probability at least  , and if
, and if  then
then  accepts with probability
accepts with probability  .
.
 is in
is in  .
.Theorem 7.15
follows from the fact that, for example, the Miller-Rabin test is a
Monte Carlo algorithm for the primality problem. We present a proof
sketch only. We show that the Miller-Rabin test accepts  with one-sided error probability as in Definition 7.14: If the given number
with one-sided error probability as in Definition 7.14: If the given number  (represented in binary) is a prime number then the algorithm cannot answer erroneously that
(represented in binary) is a prime number then the algorithm cannot answer erroneously that  is not prime. For a contradiction, suppose
is not prime. For a contradiction, suppose  is prime but the Miller-Rabin test halts with the output: “
is prime but the Miller-Rabin test halts with the output: “  is not a prime number”. Hence,
is not a prime number”. Hence,  . Since
. Since  is squared in each iteration of the
is squared in each iteration of the  loop, we sequentially test the values
loop, we sequentially test the values

modulo  . By assumption, for none of these values the algorithm says
. By assumption, for none of these values the algorithm says  were prime. It follows that for each
were prime. It follows that for each  with
with  ,
,

Since  , Fermat's Little Theorem (see Corollary 7.5) implies
, Fermat's Little Theorem (see Corollary 7.5) implies  . Thus,
. Thus,  is a square roots of
is a square roots of  modulo
modulo  . Since
. Since  is prime, there are only two square roots of
is prime, there are only two square roots of  modulo
modulo  , namely
, namely  , see Exercise 7.3-1. Since
, see Exercise 7.3-1. Since  , we must have
, we must have  . But then,
. But then,  again is a square root of
again is a square root of  modulo
modulo  . By the same argument,
. By the same argument,  . Repeating this argument again and again, we eventually obtain
. Repeating this argument again and again, we eventually obtain  , a contradiction. It follows that the Miller-Rabin test works correctly for each prime number. On the other hand, if
, a contradiction. It follows that the Miller-Rabin test works correctly for each prime number. On the other hand, if  is not a prime number, it can be shown that the error probability of the Miller-Rabin tests does not exceed the threshold of
is not a prime number, it can be shown that the error probability of the Miller-Rabin tests does not exceed the threshold of  .
Repeating the number of independent trials, the error probability can
be made arbitrarily close to zero, at the cost of increasing the
running time of course, which still will be polynomially in
.
Repeating the number of independent trials, the error probability can
be made arbitrarily close to zero, at the cost of increasing the
running time of course, which still will be polynomially in  , where
, where  is the size of the input
is the size of the input  represented in binary.
represented in binary.
Example 7.7 [RSA] Suppose Bob chooses the prime numbers  and
and  . Thus,
. Thus,  , so we have
, so we have  . If Bob now chooses the smallest exponent possible for
. If Bob now chooses the smallest exponent possible for  , namely
, namely  , then
, then  is his public key. Using the extended Euclidean algorithm, Bob determines his private key
is his public key. Using the extended Euclidean algorithm, Bob determines his private key  , and we have
, and we have  ; see Exercise 7.3-2. As in Section 7.1, we identify the alphabet
; see Exercise 7.3-2. As in Section 7.1, we identify the alphabet  with the set
with the set  . Messages are strings over
. Messages are strings over  and are encoded in blocks of fixed length as natural numbers in
and are encoded in blocks of fixed length as natural numbers in  -adic representation. In our example, the block length is
-adic representation. In our example, the block length is  .
.
More concretely, any block  of length
of length  with
with  is represented by the number
is represented by the number
Since  , we have
, we have

The RSA encryption function encrypts the block  (i.e., the corresponding number
(i.e., the corresponding number  ) as
) as  . The ciphertext for block
. The ciphertext for block  then is
then is  with
with  . Thus, RSA maps blocks of length
. Thus, RSA maps blocks of length  injectively to blocks of length
injectively to blocks of length  . Figure 7.9 shows how to subdivide a message of length
. Figure 7.9 shows how to subdivide a message of length  into
into  blocks of length
blocks of length  and how to encrypt the single blocks, which are represented by numbers.
For example, the first block, “RS”, is turned into a number as follows:
“R” corresponds to
and how to encrypt the single blocks, which are represented by numbers.
For example, the first block, “RS”, is turned into a number as follows:
“R” corresponds to  and “S” to
and “S” to  , and we have
, and we have


The resulting number  is written again in
is written again in  -adic representation and can have the length
-adic representation and can have the length  :
:  , where
, where  , see also Exercise 7.3-2. So, the first block,
, see also Exercise 7.3-2. So, the first block,  , is encrypted to yield the ciphertext “BAV”.
, is encrypted to yield the ciphertext “BAV”.
Decryption is also done blockwise. In order to decrypt the first block with the private key  , compute
, compute  , again using fast exponentiation with
, again using fast exponentiation with Square-and-Multiply. To prevent the numbers from becoming too large, it is recommendable to reduce modulo  after each multiplication. The binary expansion of the exponent is
after each multiplication. The binary expansion of the exponent is  , and we obtain
, and we obtain

as desired.
The public-key cryptosystem RSA from Figure 7.8 can be modified so as to produce digital signatures. This protocol is shown in Figure 7.10. It is easy to see that this protocol works as desired; see Exercise 7.3-2. This digital signature protocol is vulnerable to “chosen-plaintext attacks” in which the attacker can choose a plaintext and obtains the corresponding ciphertext. This attack is described, e.g., in [217].
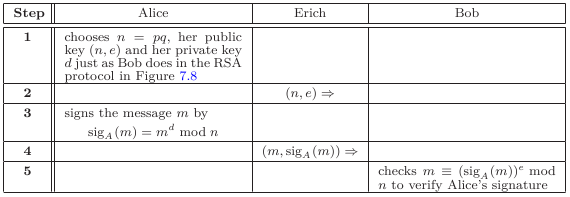
As mentioned above, the security of the RSA cryptosystem crucially
depends on the assumption that large numbers cannot be factored in a
reasonable amount of time. Despite much effort in the past, no
efficient factoring algorithm has been found until now. Thus, it is
widely believed that there is no such algorithm and the factoring
problem is hard. A rigorous proof of this hypothesis, however, has not
been found either. And even if one could prove this hypothesis, this
would not imply a proof of security of RSA. Breaking RSA is at most as
hard as the factoring problem; however, the converse is not known to
hold. That is, it is not known whether these two problems are equally
hard. It may be possible to break RSA without factoring  .
.
We omit listing potential attacks on the RSA system here. Rather,
the interested reader is pointed to the comprehensive literature on
this subject; note also Problem 7-4
at the end of this chapter. We merely mention that for each of the
currently known attacks on RSA, there are suitable countermeasures,
rules of thumb that either completely prevent a certain attack or make
its probability of success negligibly small. In particular, it is
important to take much care when choosing the prime numbers  and
and  , the modulus
, the modulus  , the public exponent
, the public exponent  , and the private key
, and the private key  .
.
Finally, since the factoring attacks on RSA play a particularly central role, we briefly sketch two such attacks. The first one is based on Pollard's  method [207]. This method is effective for composite numbers
method [207]. This method is effective for composite numbers  having a prime factor
having a prime factor  such that the prime factors of
such that the prime factors of  each are small. Under this assumption, a multiple
each are small. Under this assumption, a multiple  of
of  can be determined without knowing
can be determined without knowing  . By Fermat's Little Theorem (see Corollary 7.5), it follows that
. By Fermat's Little Theorem (see Corollary 7.5), it follows that  for all integers
for all integers  coprime with
coprime with  . Hence,
. Hence,  divides
divides  . If
. If  does not divide
does not divide  , then
, then  is a nontrivial divisor of
is a nontrivial divisor of  . Thus, the number
. Thus, the number  can be factored.
can be factored.
How can the multiple  of
of  be determined? Pollard's
be determined? Pollard's  method uses as candidates for
method uses as candidates for  the products of prime powers below a suitably chosen bound
the products of prime powers below a suitably chosen bound  :
:
If all prime powers dividing  are less than
are less than  , then
, then  is a multiple of
is a multiple of  . The algorithm determines
. The algorithm determines  for a suitably chosen base
for a suitably chosen base  . If no nontrivial divisor of
. If no nontrivial divisor of  is found, the algorithm is restarted with a new bound
is found, the algorithm is restarted with a new bound  .
.
Other factoring methods, such as the quadratic sieve, are described, e.g., in [219], [249]. They use the following simple idea. Suppose  is the number to be factored. Using the sieve, determine numbers
is the number to be factored. Using the sieve, determine numbers  and
and  such that:
such that:

Hence,  divides
divides  but neither
but neither  nor
nor  . Thus,
. Thus,  is a nontrivial factor of
is a nontrivial factor of  .
.
There are also sieve methods other than the quadratic sieve. These
methods are distinguished by the particular way of how to determine the
numbers  and
and  such that (7.10) is satisfied. A prominent example is the “general number field sieve”, see [160].
such that (7.10) is satisfied. A prominent example is the “general number field sieve”, see [160].
Exercises
7.3-1 a. Prove Theorem 7.13.
Hint. Show  and
and  using Corollary 7.5, Fermat's Little Theorem. Since
using Corollary 7.5, Fermat's Little Theorem. Since  and
and  are prime numbers with
are prime numbers with  and
and  , the claim
, the claim  now follows from the Chinese remainder theorem.
now follows from the Chinese remainder theorem.
b. The proof sketch of Theorem 7.15 uses the fact that any prime number  can have only two square roots of
can have only two square roots of  modulo
modulo  , namely
, namely  . Prove this fact.
. Prove this fact.
Hint. It may be helpful to note that  is a square root of 1 modulo
is a square root of 1 modulo  if and only if
if and only if  divides
divides  .
.
7.3-2 a. Let  and
and  be the values from Example 7.7. Show that the extended Euclidean algorithm indeed provides the private key
be the values from Example 7.7. Show that the extended Euclidean algorithm indeed provides the private key  , the inverse of
, the inverse of  .
.
b. Consider the plaintext in Figure 7.9 from Example 7.7 and its RSA encryption. Determine the encoding of this ciphertext by letters of the alphabet  for each of the 17 blocks.
for each of the 17 blocks.
c. Decrypt each of the  ciphertext blocks in Figure 7.9 and show that the original message is obtained indeed.
ciphertext blocks in Figure 7.9 and show that the original message is obtained indeed.
d. Prove that the RSA digital signature protocol from Figure 7.10 works.
Rivest, Rabi, and Sherman proposed protocols for secret-key agreement and digital signatures. The secret-key agreement protocol given in Figure 7.11 is due to Rivest and Sherman. Rabi and Sherman modified this protocol to a digital signature protocol, see Exercise 7.4-1.
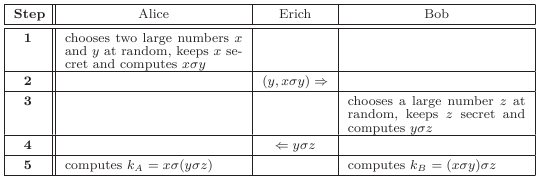
The Rivest-Sherman protocol is based on a total, strongly noninvertible, associative one-way functioní. Informally put, a one-way function
is a function that is easy to compute but hard to invert. One-way
functions are central cryptographic primitives and many cryptographic
protocols use them as their key building blocks. To capture the notion
of noninvertibility, a variety of models and, depending on the model
used, various candidates for one-way functions have been proposed. In
most cryptographic applications, noninvertibility is defined in the
average-case complexity model. Unfortunately, it is not known whether
such one-way functions exist; the security of the corresponding
protocols is merely based on the assumption of their existence. Even in
the less challenging worst-case model, in which so-called
“complexity-theoretic” one-way functions are usually defined, the
question of whether any type of one-way function exists remains an open
issue after many years of research.
A total (i.e., everywhere defined) function  mapping from
mapping from  to
to  is associative if and only if
is associative if and only if  holds for all
holds for all  , where we use the infix notation
, where we use the infix notation  instead of the prefix notation
instead of the prefix notation  . This property implies that the above protocol works:
. This property implies that the above protocol works:

so Alice and Bob indeed compute the same secret key.
The notion of strong noninvertibility is not to be defined formally here. Informally put,  is said to be strongly noninvertible if
is said to be strongly noninvertible if  is not only a one-way function, but even if in addition to the function
value one of the corresponding arguments is given, it is not possible
to compute the other argument efficiently. This property implies that
the attacker Erich, knowing
is not only a one-way function, but even if in addition to the function
value one of the corresponding arguments is given, it is not possible
to compute the other argument efficiently. This property implies that
the attacker Erich, knowing  and
and  and
and  , is not able to compute the secret numbers
, is not able to compute the secret numbers  and
and  , from which he could easily determine the secret key
, from which he could easily determine the secret key  .
.
Exercises
7.4-1 Modify the Rivest-Sherman protocol for secret-key agreement from Figure 7.11 to a protocol for digital signatures.
7.4-2 a. Try to give a formal definition of the notion of “strong noninvertibility” that is defined only informally above. Use the worst-case complexity model.
b. Suppose  is a partial function from
is a partial function from  to
to  , i.e.,
, i.e.,  may be undefined for some pairs in
may be undefined for some pairs in  .
Give a formal definition of “associativity” for partial functions. What
is wrong with the following (flawed) attempt of a definition: “A
partial function
.
Give a formal definition of “associativity” for partial functions. What
is wrong with the following (flawed) attempt of a definition: “A
partial function  is said to be associative if and only if
is said to be associative if and only if  holds for all
holds for all  for which each of the four pairs
for which each of the four pairs  ,
,  ,
,  , and
, and  is in the domain of
is in the domain of  .”
.”
Hint. A comprehensive discussion of these notions can be found in [111], [113], [114].
In Section 7.2, the “man-in-the-middle” attack on the Diffie-Hellman protocol was mentioned. The problem here is that Bob has not verified the true identity of his communication partner before executing the protocol. While he assumes to communicate with Alice, he in fact exchanges messages with Erich. In other words, Alice's task is to convince Bob of her true identity without any doubt. This cryptographic task is called authentication. Unlike digital signatures, whose purpose is to authenticate electronically transmitted documents such as emails, electronic contracts, etc., the goal now is to authenticate individuals such as human or computer parties participating in a cryptographic protocol.
Footnote. Here, an “individual” or a “party” is not necessarily a human being; it may also be a computer program that automatically executes a protocol with another computer program.
In order to authenticate herself, Alice might try to prove her identity by a secret information known to her alone, say by giving her PIN (“Personal Identifaction Number”) or any other private information that no one knows but her. However, there is a catch. To prove her identity, she would have to give her secret away to Bob. But then, it no longer is a secret! Bob, knowing her secret, might pretend to be Alice in another protocol he executes with Chris, a third party. So the question is how to prove knowledge of a secret without giving it away. This is what zero-knowledge is all about. Zero-knowledge protocols are special interactive proof systems, which were introduced by Goldwasser, Micali, and Rackoff and, independently, by Babai and Moran. Babai and Moran's notion (which is essentially equivalent to the interactive proof systems proposed by Goldwasser et al.) is known as Arthur-Merlin games, which we will now describe informally.
Merlin and Arthur wish to jointly solve a problem  , i.e., they wish to jointly decide whether or not a given input
, i.e., they wish to jointly decide whether or not a given input  belongs to
belongs to  . The mighty wizard Merlin is represented by an NP machine
. The mighty wizard Merlin is represented by an NP machine  , and the impatient King Arthur is represented by a randomised polynomial-time Turing machine
, and the impatient King Arthur is represented by a randomised polynomial-time Turing machine  .
To make their decision, they play the following game, where they are
taking turns to make alternating moves. Merlin's intention is always to
convince Arthur that
.
To make their decision, they play the following game, where they are
taking turns to make alternating moves. Merlin's intention is always to
convince Arthur that  belongs to
belongs to  (no matter whether or not that indeed is the case). Thus, each of Merlin's moves consists in presenting a proof for “
(no matter whether or not that indeed is the case). Thus, each of Merlin's moves consists in presenting a proof for “  ”, which he obtains by simulating
”, which he obtains by simulating  , where
, where  is the input and
is the input and  describes all previous moves in this game. That is, the string
describes all previous moves in this game. That is, the string  encodes all previous nondeterministic choices of
encodes all previous nondeterministic choices of  and all previous random choices of
and all previous random choices of  .
.
King Arthur, however, does not trust Merlin. Of course, he cannot
check the mighty wizard's proofs all alone; this task simply exceeds
his computational power. But he knows Merlin well enough to express
some doubts. So, he replies with a nifty challenge to Merlin by picking
some details of his proofs at random and requiring certificates for
them that he can verify. In order to satisfy Arthur, Merlin must
convince him with overwhelming probability. Thus, each of Arthur's
moves consists in the simulation of  , where
, where  again is the input and
again is the input and  describes the previous history of the game.
describes the previous history of the game.
The idea of Arthur-Merlin games can be captured via alternating existential and probabilistic quantifiers, where the former formalise Merlin's NP computation and the latter formalise Arthur's randomised polynomial-time computation.
Footnote. This is similar to the well-known characterisation of the levels of the polynomial hierarchy via alternating  and
and  quantifiers, see Section 8.4 and in particular item 3 Theorem 8.11.
quantifiers, see Section 8.4 and in particular item 3 Theorem 8.11.
In this way, a hierarchy of complexity classes can be defined, the so-called Arthur-Merlin hierarchy. We here present only the class MA from this hierarchy, which corresponds to an Arthur-Merlin game with two moves, with Merlin moving first.
Definition 7.16 (MA in the Arthur-Merlin hierarchy) The class MA contains exactly those problems  for which there exists an NP machine
for which there exists an NP machine  and a randomised polynomial-time Turing machine
and a randomised polynomial-time Turing machine  such that for each input
such that for each input  :
:
 If
If  then there exists a path
then there exists a path  of
of  such that
such that  accepts with probability at least
accepts with probability at least  (i.e., Arthur cannot refute Merlin's proof
(i.e., Arthur cannot refute Merlin's proof  for “
for “  ”, and Merlin thus wins).
”, and Merlin thus wins).
 If
If  then for each path
then for each path  of
of  ,
,  rejects with probability at least
rejects with probability at least  (i.e., Arthur is not taken in by Merlin's wrong proofs for “
(i.e., Arthur is not taken in by Merlin's wrong proofs for “  ” and thus wins).
” and thus wins).
Analogously, the classes AM, MAM, AMA,... can be defined, see Exercise 7.5-1.
In Definition 7.16, the probability threshold of  for Arthur to accept or to reject, respectively, is chosen at will and
does not appear to be large enough at first glance. In fact, the
probability of success can be amplified using standard techniques and
can be made arbitrarily close to one. In other words, one might have
chosen even a probability threshold as low as
for Arthur to accept or to reject, respectively, is chosen at will and
does not appear to be large enough at first glance. In fact, the
probability of success can be amplified using standard techniques and
can be made arbitrarily close to one. In other words, one might have
chosen even a probability threshold as low as  , for an arbitrary fixed constant
, for an arbitrary fixed constant  ,
and would still have defined the same class. Furthermore, it is known
that for a constant number of moves, the Arthur-Merlin hierarchy
collapses down to AM:
,
and would still have defined the same class. Furthermore, it is known
that for a constant number of moves, the Arthur-Merlin hierarchy
collapses down to AM:

It is an open question whether or not any of the inclusions  is a strict one.
is a strict one.
A similar model, which can be used as an alternative to the Arthur-Merlin games, are the interactive proof systems mentioned above. The two notions use different terminology: Merlin now is called the “prover” and Arthur the “verifier”. Also, their communication is not interpreted as a game but rather as a protocol. Another difference between the two models, which appears to be crucial at first, is that Arthur's random bits are public (so, in particular, Merlin knows them), whereas the random bits of the verifier in an interactive proof system are private. However, Goldwasser and Sipser [95] proved that, in fact, it does not matter whether the random bits are private or public, so Arthur-Merlin games essentially are equivalent to interactive proof systems.
If one allows a polynomial number of moves (instead of a constant
number), then one obtains the complexity class IP. Note that
interactive proof systems are also called IP protocols. By definition,
IP contains all of NP. In particular, the graph isomorphism problem is
in IP. We will see later that IP also contains problems from  that are supposed to be not in NP. In particular, the proof of Theorem
8.16 shows that the complement of the graph isomorphism problem is in
AM and thus in IP. A celebrated result by Shamir [232] says that IP equals PSPACE, the class of problems solvable in polynomial space.
that are supposed to be not in NP. In particular, the proof of Theorem
8.16 shows that the complement of the graph isomorphism problem is in
AM and thus in IP. A celebrated result by Shamir [232] says that IP equals PSPACE, the class of problems solvable in polynomial space.
Let us now turn back to the problem of authentication mentioned above, and to the related notion of zero-knowledge protocols. Here is the idea. Suppose Arthur and Merlin play one of their games. So, Merlin sends hard proofs to Arthur. Merlin alone knows how to get such proofs. Being a wise wizard, he keeps this knowledge secret. And he uses his secret to authenticate himself in the communication with Arthur.
Now suppose that malicious wizard Marvin wishes to fool Arthur by pretending to be Merlin. He disguises as Merlin and uses his magic to look just like him. However, he does not know Merlin's secret of how to produce hard proofs. His magic is no more powerful than that of an ordinary randomised polynomial-time Turing machine. Still, he seeks to simulate the communication between Merlin and Arthur. An interactive proof system has the zero-knowledge property if the information communicated between Marvin and Arthur cannot be distinguished from the information communicated between Merlin and Arthur. Note that Marvin, who does not know Merlin's secret, cannot introduce any information about this secret into the simulated IP protocol. Nonetheless, he is able to perfectly copy the original protocol, so no one can tell a difference. Hence, the (original) protocol itself must have the property that it does not leak any information whatsoever about Merlin's secret. If there is nothing to put in, there can be nothing to take out.
Definition 7.17 (Zero-knowledge protocol) Let  be any set in IP, and let
be any set in IP, and let  be an interactive proof system for
be an interactive proof system for  , where
, where  is an NPTM and
is an NPTM and  is a randomised polynomial-time Turing machine. The IP protocol
is a randomised polynomial-time Turing machine. The IP protocol  is a zero-knowledge protocol for
is a zero-knowledge protocol for  if and only if there exists a randomised polynomial-time Turing machine such that
if and only if there exists a randomised polynomial-time Turing machine such that  simulates the original protocol
simulates the original protocol  and, for each
and, for each  , the tuples
, the tuples  and
and  representing the information communicated in
representing the information communicated in  and in
and in  , respectively, are identically distributed over the random choices in
, respectively, are identically distributed over the random choices in  and in
and in  , respectively.
, respectively.
The notion defined above is called “honest-verifier perfect zero-knowledge” in the literature, since (a) it is assumed that the verifier is honest (which may not necessarily be true in cryptographic applications though), and (b) it is required that the information communicated in the simulated protocol perfectly coincides with the information communicated in the original protocol. Assumption (a) may be somewhat too idealistic, and assumption (b) may be somewhat too strict. That is why also other variants of zero-knowledge protocols are studied, see the notes at the end of this chapter.
Let us consider a concrete example now. As mentioned above, the graph isomorphism problem ( , for short) is in NP, and the complementary problem
, for short) is in NP, and the complementary problem  is in AM, see the proof of Theorem 8.16. Thus, both problems are
contained in IP. We now describe a zero-knowledge protocol for
is in AM, see the proof of Theorem 8.16. Thus, both problems are
contained in IP. We now describe a zero-knowledge protocol for  that is due to Goldreich, Micali, and Wigderson [91]. Figure 7.12 shows this IP protocol between the prover Merlin and the verifier Arthur.
that is due to Goldreich, Micali, and Wigderson [91]. Figure 7.12 shows this IP protocol between the prover Merlin and the verifier Arthur.
Although there is no efficient algorithm known for  , Merlin can solve this problem, since
, Merlin can solve this problem, since  is in NP. However, there is no need for him to do so in the protocol. He can simply generate a large graph
is in NP. However, there is no need for him to do so in the protocol. He can simply generate a large graph  with
with  vertices and a random permutation
vertices and a random permutation  . Then, he computes the graph
. Then, he computes the graph  and makes the pair
and makes the pair  public. The isomorphism
public. The isomorphism  between
between  and
and  is kept secret as Merlin's private information.
is kept secret as Merlin's private information.
Of course, Merlin cannot send  to Arthur, since he does not want to give his secret away. Rather, to prove that the two graphs,
to Arthur, since he does not want to give his secret away. Rather, to prove that the two graphs,  and
and  , indeed are isomorphic, Merlin randomly chooses an isomorphism
, indeed are isomorphic, Merlin randomly chooses an isomorphism  under the uniform distribution and a bit
under the uniform distribution and a bit  and computes the graph
and computes the graph  . He then sends
. He then sends  to Arthur whose response is a challenge for Merlin: Arthur sends a random bit
to Arthur whose response is a challenge for Merlin: Arthur sends a random bit  , chosen under the uniform distribution, to Merlin and requests to see an isomorphism
, chosen under the uniform distribution, to Merlin and requests to see an isomorphism  between
between  and
and  . Arthur accepts if and only if
. Arthur accepts if and only if  indeed satisfies
indeed satisfies  .
.
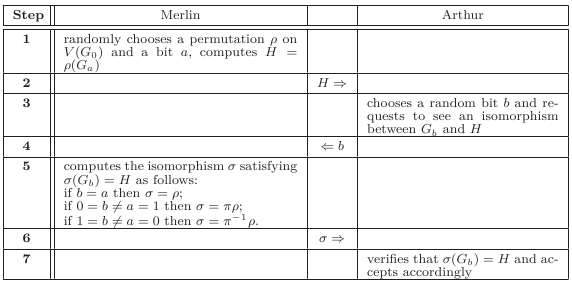
The protocol works, since Merlin knows his secret isomorphism  and his random permutation
and his random permutation  : It is no problem for Merlin to compute the isomorphism
: It is no problem for Merlin to compute the isomorphism  between
between  and
and  and thus to authenticate himself. The secret
and thus to authenticate himself. The secret  is not given away. Since
is not given away. Since  and
and  are isomorphic, Arthur accepts with probability one. The case of two
nonisomorphic graphs does not need to be considered here, since Merlin
has chosen isomorphic graphs
are isomorphic, Arthur accepts with probability one. The case of two
nonisomorphic graphs does not need to be considered here, since Merlin
has chosen isomorphic graphs  and
and  in the protocol; see also the proof of Theorem 8.16.
in the protocol; see also the proof of Theorem 8.16.
Now, suppose, Marvin wishes to pretend to be Merlin when communicating with Arthur. He does know the graphs  and
and  , but he doesn't know the secret isomorphism
, but he doesn't know the secret isomorphism  . Nonetheless, he tries to convince Arthur that he does know
. Nonetheless, he tries to convince Arthur that he does know  . If Arthur's random bit
. If Arthur's random bit  happens to be the same as his bit
happens to be the same as his bit  , to which Marvin committed before he sees
, to which Marvin committed before he sees  , then Marvin wins. However, if
, then Marvin wins. However, if  , then computing
, then computing  or
or  requires knowledge of
requires knowledge of  . Since
. Since  is not efficiently solvable (and even too hard for a randomised
polynomial-time Turing machine), Marvin cannot determine the
isomorphism
is not efficiently solvable (and even too hard for a randomised
polynomial-time Turing machine), Marvin cannot determine the
isomorphism  for sufficiently large graphs
for sufficiently large graphs  and
and  . But without knowing
. But without knowing  , all he can do is guess. His chances of hitting a bit
, all he can do is guess. His chances of hitting a bit  with
with  are at most
are at most  . Of course, Marvin can always guess, so his success probability is exactly
. Of course, Marvin can always guess, so his success probability is exactly  . If Arthur challenges him in
. If Arthur challenges him in  independent rounds of this protocol again and again, the probability of Marvin's success will be only
independent rounds of this protocol again and again, the probability of Marvin's success will be only  . Already for
. Already for  , this probability is negligibly small: Marvin's probability of success is then less than one in one million.
, this probability is negligibly small: Marvin's probability of success is then less than one in one million.
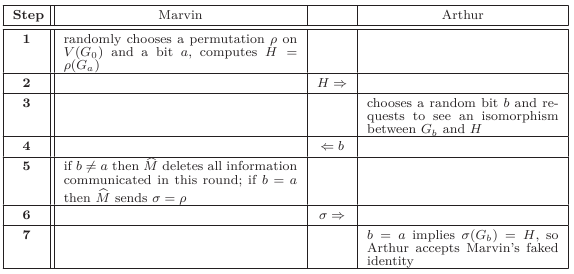
It remains to show that the protocol from Figure 7.12 is a zero-knowledge protocol. Figure 7.13 shows a simulated protocol with Marvin who does not know Merlin's secret  but pretends to know it. The information communicated in one round of the protocol has the form of a triple:
but pretends to know it. The information communicated in one round of the protocol has the form of a triple:  . If Marvin is lucky enough to choose a random bit
. If Marvin is lucky enough to choose a random bit  with
with  , he can simply send
, he can simply send  and wins: Arthur (or any third party watching the communication) will not notice the fraud. On the other hand, if
and wins: Arthur (or any third party watching the communication) will not notice the fraud. On the other hand, if  then Marvin's attempt to betray will be uncovered. However, that is no
problem for the malicious wizard: He simply deletes this round from the
protocol and repeats. Thus, he can produce a sequence of triples of the
form
then Marvin's attempt to betray will be uncovered. However, that is no
problem for the malicious wizard: He simply deletes this round from the
protocol and repeats. Thus, he can produce a sequence of triples of the
form  that is indistinguishable from the corresponding sequence of triples in
the original protocol between Merlin and Arthur. It follows that
Goldreich, Micali, and Wigderson's protocol for
that is indistinguishable from the corresponding sequence of triples in
the original protocol between Merlin and Arthur. It follows that
Goldreich, Micali, and Wigderson's protocol for  is a zero-knowledge protocol.
is a zero-knowledge protocol.
Exercises
7.5-1 Arthur-Merlin hierarchy:
a. Analogously to MA from Definition 7.16, define the other classes AM, MAM, AMA, ... of the Arthur-Merlin hierarchy.
b. What is the inclusion structure between the classes MA, coMA, AM, coAM, and the classes of the polynomial hierarchy defined in Definition 8.10 of Subsection 8.4.1.
7.5-2 Zero-knowledge protocol for graph isomorphism:
a. Consider the graphs  and
and  from Example 7.4 in Section 7.1.3. Execute the zero-knowledge protocol from Figure 7.12 with the graphs
from Example 7.4 in Section 7.1.3. Execute the zero-knowledge protocol from Figure 7.12 with the graphs  and
and  and the isomorphism
and the isomorphism  . Use an isomorphism
. Use an isomorphism  of your choice, and try all possibilities for the random bits
of your choice, and try all possibilities for the random bits  and
and  . Repeat this Arthur-Merlin game with an unknown isomorphism
. Repeat this Arthur-Merlin game with an unknown isomorphism  chosen by somebody else.
chosen by somebody else.
b. Modify the protocol from Figure 7.12 such that, with only one round of the protocol, Marvin's success probability is less than  .
.
PROBLEMS |

Let  and
and  . We say
. We say  is congruent to
is congruent to  modulo
modulo  (
( , for short) if and only if
, for short) if and only if  divides the difference
divides the difference  . For example,
. For example,  and
and  . The congruence
. The congruence  modulo
modulo  defines an equivalence relation on
defines an equivalence relation on  , i.e., it is reflexive (
, i.e., it is reflexive ( ), symmetric (if
), symmetric (if  then
then  ), and transitive (
), and transitive ( and
and  imply
imply  ).
).
The set  is the remainder class of
is the remainder class of  . For example, the remainder class of
. For example, the remainder class of  is
is

We represent the remainder class of  by the smallest natural number in
by the smallest natural number in  . For instance,
. For instance,  represents the remainder class of
represents the remainder class of  . The set of all remainder classes
. The set of all remainder classes  is
is  . On
. On  , addition is defined by
, addition is defined by  , and multiplication is defined by
, and multiplication is defined by  . For example, in the arithmetics modulo
. For example, in the arithmetics modulo  , we have
, we have  and
and  . Prove that in the arithmetics modulo
. Prove that in the arithmetics modulo  :
:
a.  is a commutative ring with one;
is a commutative ring with one;
b.  , which is defined in Example 7.3, is a multiplicative group;
, which is defined in Example 7.3, is a multiplicative group;
c.  is a field for each prime number
is a field for each prime number  .
.
d. Prove that the neutral element of a group and the inverse of each group element are unique.
e. Let  be a commutative ring with one. Prove that the set of all invertible elements in
be a commutative ring with one. Prove that the set of all invertible elements in  forms a multiplicative group. Determine this group for the ring
forms a multiplicative group. Determine this group for the ring  .
.
The graph isomorphism problem can be solved efficiently on special graph classes, such as on the class of trees. An (undirected) tree is a connected graph without cycles. (A cycle is a sequence of pairwise incident edges that returns to the point of origin.) The leaves of a tree are the vertices with degree one. The tree isomorphism problem is defined by

Design an efficient algorithm for this problem.
Hint. Label the vertices of the given pair of trees successively by suitable number sequences. Compare the resulting sequences of labels in the single loops of the algorithm. Starting from the leaves of the trees and then working step by step towards the center of the trees, the algorithm halts as soon as all vertices are labelled. This algorithm can be found, e.g., in [150].
Design an efficient algorithm in pseudocode for computing the determinant of a matrix. Implement your algorithm in a programming language of your choice. Can the inverse of a matrix be computed efficiently?
a. Consider the RSA cryptosystem from Figure 7.8. For the sake of efficiency, the public exponent  has been popular. However, this choice is dangerous. Suppose Alice, Bob, and Chris encrypt the same message
has been popular. However, this choice is dangerous. Suppose Alice, Bob, and Chris encrypt the same message  with the same public exponent
with the same public exponent  , but perhaps with distinct moduli,
, but perhaps with distinct moduli,  ,
,  , and
, and  . Erich intercepts the resulting three ciphertexts:
. Erich intercepts the resulting three ciphertexts:  for
for  . Then, Erich can easily decrypt the message
. Then, Erich can easily decrypt the message  . How?
. How?
Hint. Erich knows the Chinese remainder theorem, which also was useful in Exercise 7.3-1. A recommended value for the public exponent is  , since its binary expansion has only two ones. Thus, the square-and-multiply algorithm runs fast for this
, since its binary expansion has only two ones. Thus, the square-and-multiply algorithm runs fast for this  .
.
b. The attack described above can be extended to  ciphertexts that are related with each other as follows. Let
ciphertexts that are related with each other as follows. Let  and
and  be known,
be known,  , and suppose that
, and suppose that  messages
messages  are sent and are intercepted by Erich. Further, suppose that
are sent and are intercepted by Erich. Further, suppose that  and
and  . How can attacker Erich now determine the original message
. How can attacker Erich now determine the original message  ?
?
Hint. Apply so-called lattice reduction techniques (see, e.g., Micciancio and Goldwasser [179]). The attack mentioned here is due to Hastad [109] and has been strengthened later by Coppersmith [53].
c. How can the attacks described above be prevented?
CHAPTER NOTES |
Singh's book [241] gives a nice introduction to the history of cryptology, from its ancient roots to modern cryptosystems. For example, you can find out there about recent discoveries related to the development of RSA and Diffie-Hellman in the nonpublic sector. Ellis, Cocks, and Williamson from the Communications Electronics Security Group (CESG) of the British Government Communications Head Quarters (GCHQ) proposed the RSA system from Figure 7.8 and the Diffie-Hellman protocol from Figure 7.7 even earlier than Rivest, Shamir, and Adleman and at about the same time as but independent of Diffie and Hellman, respectively. RSA and Diffie-Hellman are described in probably every book about cryptography written since their invention. A more comprehensive list of attacks against RSA than that of Section 7.3 can be found in, e.g., [29], [136], [187], [217], [219], [233].
Primality tests such as the Miller-Rabin test and factoring algorithms are also described in many books, e.g., in [92], [219], [223], [249].
The notion of strongly noninvertible associative one-way functions, on which the secret-key agreement protocol from Figure 7.11
is based, is due to Rivest and Sherman. The modification of this
protocol to a digital signature scheme is due to Rabi and Sherman. In
their paper [208], they also proved that commutative, associative one-way function exist if and only if  . However, the one-way functions they construct are neither total nor strongly noninvertible, even if
. However, the one-way functions they construct are neither total nor strongly noninvertible, even if  is assumed. Hemaspaandra and Rothe [114] proved that total, strongly noninvertible, commutative, associative one-way functions exist if and only if
is assumed. Hemaspaandra and Rothe [114] proved that total, strongly noninvertible, commutative, associative one-way functions exist if and only if  . Further investigations on this topic can be found in [28], [111], [113], [116].
. Further investigations on this topic can be found in [28], [111], [113], [116].
The notion of interactive proof systems and zero-knowledge protocols is due to Goldwasser, Micali, and Rackoff [94]. One of the best and most comprehensive sources on this field is Chapter 4 in Goldreich's book [92]; see also the books [152], [198], [219] and the surveys [93], [90], [217]. Arthur-Merlin games were introduced by Babai and Moran [19], [18] and have been investigated in many subsequent papers. Variants of the notion of zero-knowledge, which differ from the notion in Definition 7.17 in their technical details, are extensively discussed in, e.g., [92] and also in, e.g., [90], [93], [217].
Table of Contents
In Chapter 7, efficient algorithms were introduced that are important for cryptographic protocols. Designing efficient algorithms of course is a central task in all areas of computer science. Unfortunately, many important problems have resisted all attempts in the past to devise efficient algorithms solving them. Well-known examples of such problems are the satisfiability problem for boolean formulas and the graph isomorphism problem.
One of the most important tasks in complexity theory is to classify such problems according to their computational complexity. Complexity theory and algorithmics are the two sides of the same medal; they complement each other in the following sense. While in algorithmics one seeks to find the best upper bound for some problem, an important goal of complexity theory is to obtain the best possible lower bound for the same problem. If the upper and the lower bound coincide, the problem has been classified.
The proof that some problem cannot be solved efficiently often appears to be “negative” and not desirable. After all, we wish to solve our problems and we wish to solve them fast. However, there is also some “positive” aspect of proving lower bounds that, in particular, is relevant in cryptography (see Chapter 7). Here, we are interested in the applications of inefficiency: A proof that certain problems (such as the factoring problem or the discrete logarithm) cannot be solved efficiently can support the security of some cryptosystems that are important in practical applications.
In Section 8.1,
we provide the foundations of complexity theory. In particular, the
central complexity classes P and NP are defined. The question of
whether or not these two classes are equal is still open after more
than three decades of intense research. Up to now, neither a proof of
the inequality  (which is widely believed) could be achieved, nor were we able to prove
the equality of P and NP. This question led to the development of the
beautiful and useful theory of NP-completeness.
(which is widely believed) could be achieved, nor were we able to prove
the equality of P and NP. This question led to the development of the
beautiful and useful theory of NP-completeness.
One of the best understood NP-complete problems is  , the satisfiability problem of propositional logic: Given a boolean formula
, the satisfiability problem of propositional logic: Given a boolean formula  , does there exist a satisfying assignment for
, does there exist a satisfying assignment for  , i.e., does there exist an assignment of truth values to
, i.e., does there exist an assignment of truth values to  's variables that makes
's variables that makes  true? Due to its NP-completeness, it is very unlikely that there exist efficient deterministic algorithms for
true? Due to its NP-completeness, it is very unlikely that there exist efficient deterministic algorithms for  . In Section 8.3, we present a deterministic and a randomised algorithm for
. In Section 8.3, we present a deterministic and a randomised algorithm for  that both run in exponential time. Even though these algorithms are asymptotically inefficient (which is to say that they are useless in practice for large
inputs), they are useful for sufficiently small inputs of sizes still
relevant in practice. That is, they outperform the naive deterministic
exponential-time algorithm for
that both run in exponential time. Even though these algorithms are asymptotically inefficient (which is to say that they are useless in practice for large
inputs), they are useful for sufficiently small inputs of sizes still
relevant in practice. That is, they outperform the naive deterministic
exponential-time algorithm for  in that they considerably increase the input size for which the algorithm's running time still is tolerable.
in that they considerably increase the input size for which the algorithm's running time still is tolerable.
In Section 8.4,
we come back to the graph isomorphism problem, which was introduced in
Section 7.1.3 (see Definition 7.8) and which was useful in Section
7.5.2 with regard to the zero-knowledge protocols. This problem is one
of the few natural problems in NP, which (under the plausible
assumption that  )
may be neither efficiently solvable nor be NP-complete. In this regard,
this problem is special among the problems in NP. Evidence for the
hypothesis that the graph isomorphism problem may be neither in P nor
NP-complete comes from the theory of lowness, which is introduced in Section 8.4. In particular, we present Schöning's result that
)
may be neither efficiently solvable nor be NP-complete. In this regard,
this problem is special among the problems in NP. Evidence for the
hypothesis that the graph isomorphism problem may be neither in P nor
NP-complete comes from the theory of lowness, which is introduced in Section 8.4. In particular, we present Schöning's result that  is contained in the low hierarchy within NP. This result provides strong evidence that
is contained in the low hierarchy within NP. This result provides strong evidence that  is not NP-complete. We also show that
is not NP-complete. We also show that  is contained in the complexity class SPP and thus is low for certain
probabilistic complexity classes. Informally put, a set is low for a complexity class
is contained in the complexity class SPP and thus is low for certain
probabilistic complexity classes. Informally put, a set is low for a complexity class  if it does not provide any useful information when used as an “oracle” in
if it does not provide any useful information when used as an “oracle” in  computations. For proving the lowness of
computations. For proving the lowness of  , certain group-theoretic algorithms are useful.
, certain group-theoretic algorithms are useful.
As mentioned above, complexity theory is concerned with proving lower bounds. The difficulty in such proofs is that it is not enough to analyse the runtime of just one concrete algorithm for the problem considered. Rather, one needs to show that every algorithm solving the problem has a runtime no better than the lower bound to be proven. This includes also algorithms that have not been found as yet. Hence, it is necessary to give a formal and mathematically precise definition of the notion of algorithm.
Since the 1930s, a large variety of formal algorithm models has been proposed. All these models are equivalent in the sense that each such model can be transformed (via an algorithmic procedure) into any other such model. Loosely speaking, one might consider this transformation as some sort of compilation between distinct programming languages. The equivalence of all these algorithm models justifies Church's thesis, which says that each such model captures precisely the somewhat vague notion of “intuitive computability”. The algorithm model that is most common in complexity theory is the Turing machine, which was introduced in 1936 by Alan Turing (1912 until 1954) in his pathbreaking work [259]. The Turing machine is a very simple abstract model of a computer. In what follows, we describe this model by defining its syntax and its semantics, and introduce at the same time two basic computation paradigms: determinism and nondeterminism. It makes sense to first define the more general model of nondeterministic Turing machines. Deterministic Turing machines then are easily seen to be a special case.
First, we give some technical details and describe how Turing machines work. A Turing machine has  infinite work tapes that are subdivided into cells. Every cell may
contain one letter of the work alphabet. If a cell does not contain a
letter, we indicate this by a special blank symbol, denoted by
infinite work tapes that are subdivided into cells. Every cell may
contain one letter of the work alphabet. If a cell does not contain a
letter, we indicate this by a special blank symbol, denoted by  .
The computation is done on the work tapes. Initially, a designated
input tape contains the input string, and all other cells contain the
blank. If a computation halts, its result is the string contained in
the designated output tape.
.
The computation is done on the work tapes. Initially, a designated
input tape contains the input string, and all other cells contain the
blank. If a computation halts, its result is the string contained in
the designated output tape.
Footnote. One can require, for example, that the input tape is a read-only and the output tape is a write-only tape. Similarly, one can specify a variety of further variations of the technical details, but we do not pursue this any further here.
To each tape belongs a head that accesses exactly one cell of this tape. In each step of the computation, the head can change the symbol currently read and then moves to the left or to the right or does not move at all. At the same time, the current state of the machine, which is stored in its “finite control” can change. Figure 8.1 displays a Turing machine with one input and two work tapes.
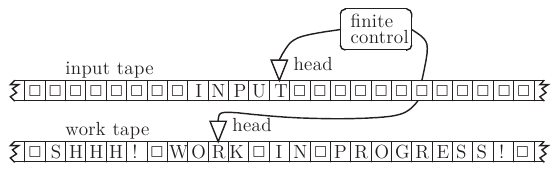
Definition 8.1 (Syntax of Turing machines) A nondeterministic Turing machine with  tapes (a
tapes (a  -tape NTM, for short) is a
-tape NTM, for short) is a  -tuple
-tuple  , where
, where  is the input alphabet,
is the input alphabet,  is the work alphabet,
is the work alphabet,  is a finite set of states disjoint with
is a finite set of states disjoint with  ,
,  is the transition function,
is the transition function,  is the initial state,
is the initial state,  is the blank symbol, and
is the blank symbol, and  is the set of final states. Here,
is the set of final states. Here,  denotes the power set of set
denotes the power set of set  , i.e., the set of all subsets of
, i.e., the set of all subsets of  .
.
For readability, we write  instead of
instead of  with
with  ,
,  and
and  . This transition has the following meaning. If the current state is
. This transition has the following meaning. If the current state is  and the head currently reads a symbol
and the head currently reads a symbol  , then:
, then:

 is replaced by
is replaced by  ,
,

 is the new state, and
is the new state, and
 the head moves according to
the head moves according to  , i.e., the head either moves one cell to the left (if
, i.e., the head either moves one cell to the left (if  ), or one cell to the right (if
), or one cell to the right (if  ), or it does not move at all (if
), or it does not move at all (if  ).
).
The special case of a deterministic Turing machine with  tapes (
tapes ( -tape DTM, for short) is obtained by requiring that the transition function
-tape DTM, for short) is obtained by requiring that the transition function  maps from
maps from  to
to  .
.
For  , we obtain the one-tape Turing machine, abbreviated simply by NTM and DTM, respectively. Every
, we obtain the one-tape Turing machine, abbreviated simply by NTM and DTM, respectively. Every  -tape NTM or
-tape NTM or  -tape
DTM can be simulated by a Turing machine with only one tape, where the
runtime at most doubles. Turing machines can be considered both as
acceptors (which accept languages) and as transducers (which compute
functions).
-tape
DTM can be simulated by a Turing machine with only one tape, where the
runtime at most doubles. Turing machines can be considered both as
acceptors (which accept languages) and as transducers (which compute
functions).
Definition 8.2 (Semantics of Turing machines) Let  be an {NTM}. A configuration of
be an {NTM}. A configuration of  is a string
is a string  , where
, where  is interpreted as follows:
is interpreted as follows:  is the current tape inscription, the head reads the first symbol of
is the current tape inscription, the head reads the first symbol of  , and
, and  is the current state of
is the current state of  . On the set
. On the set  of all configurations of
of all configurations of  , define a binary relation
, define a binary relation  , which describes the transition from a configuration
, which describes the transition from a configuration  into a configuration
into a configuration  according to
according to  . For any two strings
. For any two strings  and
and  in
in  , where
, where  and
and  , and for all
, and for all  , define
, define

Two special cases need be considered separately:
1. If  and
and  (i.e.,
(i.e.,  's head moves to the right and reads a
's head moves to the right and reads a  symbol), then
symbol), then  .
.
2. If  and
and  (i.e.,
(i.e.,  's head moves to the left and reads a
's head moves to the left and reads a  symbol), then
symbol), then  .
.
The initial configuration of  on input
on input  is always
is always  . The final configurations of
. The final configurations of  on input
on input  have the form
have the form  with
with  and
and  . Let
. Let  be the reflexive, transitive closure of
be the reflexive, transitive closure of  : For
: For  , we have
, we have  if and only if there is a finite sequence
if and only if there is a finite sequence  of configurations in
of configurations in  such that
such that

where possibly  . If
. If  is the initial configuration of
is the initial configuration of  on input
on input  , then this sequence of configurations is a finite computation of
, then this sequence of configurations is a finite computation of  , and we say
, and we say  halts on input
halts on input  . The language accepted by
. The language accepted by  is defined by
is defined by

For NTMs, any configuration may be followed by more than one configuration. Thus, they have a computation tree,
whose root is labelled by the initial configuration and whose leaves
are labelled by the final configurations. Note that trees are special
graphs (recall Definition 7.8 in Section 7.1.3 and Problem 7-2), so
they have vertices and edges. The vertices of a computation tree  are the configurations of
are the configurations of  on input
on input  . For any two configurations
. For any two configurations  and
and  from
from  , there is exactly one directed edge from
, there is exactly one directed edge from  to
to  if and only if
if and only if  . A path in the computation tree of
. A path in the computation tree of  is a sequence of configurations
is a sequence of configurations  .
The computation tree of an NTM can have infinite paths on which never a
halting configuration is reached. For DTMs, each non-halting
configuration has a unique successor configuration. Thus, the
computation tree of a DTM degenerates to a linear chain.
.
The computation tree of an NTM can have infinite paths on which never a
halting configuration is reached. For DTMs, each non-halting
configuration has a unique successor configuration. Thus, the
computation tree of a DTM degenerates to a linear chain.
Example 8.1 Consider the language  . A Turing machine accepting
. A Turing machine accepting  is given by
is given by

where the transitions of  are stated in Figure 8.2. Figure 8.3 provides the meaning of the single states of
are stated in Figure 8.2. Figure 8.3 provides the meaning of the single states of  and the intention corresponding to the each state. See also Exercise 8.1-2.
and the intention corresponding to the each state. See also Exercise 8.1-2.
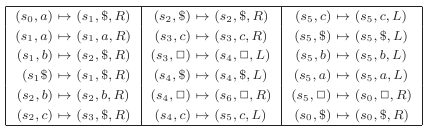
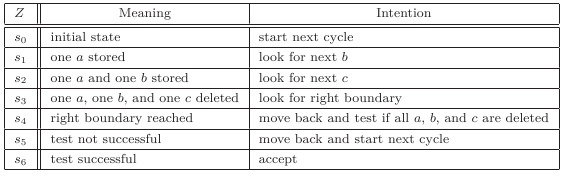
In
order to classify problems according to their computational complexity,
we need to define complexity classes. Each such class is defined by a
given resource function and contains all problems that can be solved by
a Turing machine that requires no more of a resource (e.g., computation
time or memory space) than is specified by the resource function. We
consider only the resource time here, i.e., the number of steps—as a
function of the input size—needed to solve (or to accept) the problem.
Further, we consider only the traditional worst-case complexity model. That is, among all inputs of size  ,
those that require the maximum resource are decisive; one thus assumes
the worst case to occur. We now define deterministic and
nondeterministic time complexity classes.
,
those that require the maximum resource are decisive; one thus assumes
the worst case to occur. We now define deterministic and
nondeterministic time complexity classes.
Definition 8.3 (Deterministic and nondeterministic time complexity)
 Let
Let  be a DTM with
be a DTM with  and let
and let  be an input. Define the time function of
be an input. Define the time function of  , which maps from
, which maps from  to
to  , as follows:
, as follows:

Define the function  by:
by:

 Let
Let  be an NTM with
be an NTM with  and let
and let  be an input. Define the time function of
be an input. Define the time function of  , which maps from
, which maps from  to
to  , as follows:
, as follows:

Define the function  by
by

 Let
Let  be a computable function that maps from
be a computable function that maps from  to
to  . Define the deterministic and nondeterministic complexity classes with time function
. Define the deterministic and nondeterministic complexity classes with time function  by
by
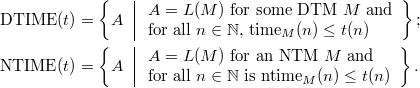
 Let
Let  be the set of all polynomials. Define the complexity classes P and NP as follows:
be the set of all polynomials. Define the complexity classes P and NP as follows:

Why are the classes P and NP so important? Obviously,
exponential-time algorithms cannot be considered efficient in general.
Garey and Johnson compare the rates of growth of some particular
polynomial and exponential time functions  for certain input sizes relevant in practice, see Figure 8.4.
They assume that a computer executes one million operations per second.
Then all algorithms bounded by a polynomial run in a “reasonable” time
for inputs of size up to
for certain input sizes relevant in practice, see Figure 8.4.
They assume that a computer executes one million operations per second.
Then all algorithms bounded by a polynomial run in a “reasonable” time
for inputs of size up to  , whereas for example an algorithm with time bound
, whereas for example an algorithm with time bound  takes more than
takes more than  years already for the modest input size of
years already for the modest input size of  . For
. For  it takes almost
it takes almost  centuries, and for
centuries, and for  a truly astronomic amount of time.
a truly astronomic amount of time.
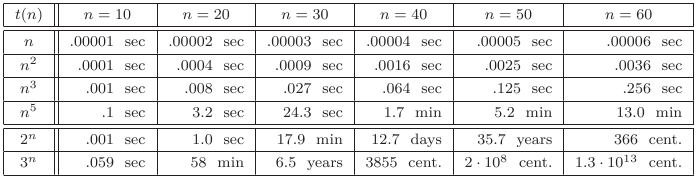
The last decades have seen an impressive development of computer and hardware technology. Figure 8.5 (taken from [81])
shows that this is not enough to provide an essentially better runtime
behaviour for exponential-time algorithms, even assuming that the
previous trend in hardware development continues. What would happen if
one had a computer that is  times or even
times or even  times as fast as current computers are? For functions
times as fast as current computers are? For functions  ,
,  , let
, let  be the maximum size of inputs that can be solved by a
be the maximum size of inputs that can be solved by a  time-bounded algorithm within one hour. Figure 8.5 also taken from [81]) shows that a computer
time-bounded algorithm within one hour. Figure 8.5 also taken from [81]) shows that a computer  times faster than today's computers increases
times faster than today's computers increases  for
for  by only an additive value close to
by only an additive value close to  . In contrast, using computers with the same increase in speed, an
. In contrast, using computers with the same increase in speed, an  time-bounded algorithm can handle problem instances about four times as large as before.
time-bounded algorithm can handle problem instances about four times as large as before.
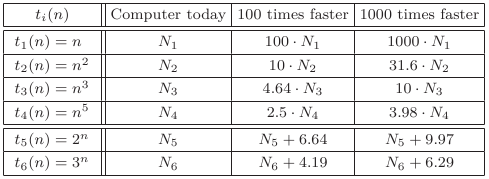
Intuitively,
the complexity class P contains the efficiently solvable problems. The
complexity class NP contains many problems important in practice but
currently not efficiently solvable. Examples are the satisfiability
problem and the graph isomorphism problem that will be dealt with in
more detail later in this chapter. The question of whether or not the
classes P and NP are equal is still open. This famous P-versus-NP
question gave rise to the theory of NP-completeness, which is briefly
introduced in Section 8.2.
Exercises
8.1-1 Can Church's thesis ever be proven formally?
8.1-2 Consider the Turing machine  in Example 8.1.
in Example 8.1.
a. What are the sequences of configurations of  for inputs
for inputs  and
and  , respectively?
, respectively?
b. Prove that  is correct, i.e., show that
is correct, i.e., show that  .
.
c. Estimate the running time of  .
.
d. Show that the graph isomorphism problem and the graph automorphism problem introduced in Definition 7.8 are both in NP.
The theory of NP-completeness provides methods to prove lower bounds for problems in NP. An NP problem is said to be complete in NP if it belongs to the hardest problems in this class, i.e., if it is at least as hard as any NP problem. The complexity of two given problems can be compared by polynomial-time reductions. Among the different types of reduction one can consider, we focus on the polynomial-time many-one reducibility in this section. In Section 8.4, more general reducibilities will be introduced, such as the polynomial-time Turing reducibility and the polynomial-time (strong) nondeterministic Turing reducibility.
Definition 8.4 (Reducibility, NP-Completeness) A set  is reducible to a set
is reducible to a set  (in symbols,
(in symbols,  ) if and only if there exists a polynomial-time computable function
) if and only if there exists a polynomial-time computable function  such that for all
such that for all  ,
,  . A set
. A set  is said to be
is said to be  -hard for NP if and only if
-hard for NP if and only if  for each set
for each set  . A set
. A set  is said to be
is said to be  -complete in NP (NP-complete, for short) if and only if
-complete in NP (NP-complete, for short) if and only if  is
is  -hard for NP and
-hard for NP and  .
.
Reductions are efficient algorithms that can be used to show that
problems are not efficiently solvable. That is, if one can efficiently
transform a hard problem into another problem via a reduction, the
hardness of the former problem is inherited by the latter problem. At
first glance, it might seem that infinitely many efficient algorithms
are required to prove some problem  NP-hard, namely one reduction from each of the infinitely many NP problems to
NP-hard, namely one reduction from each of the infinitely many NP problems to  . However, an elementary result says that it is enough to find just one such reduction, from some NP-complete problem
. However, an elementary result says that it is enough to find just one such reduction, from some NP-complete problem  . Since the
. Since the  -reducibility is transitive (see Exercise 8.2-2), the NP-hardness of
-reducibility is transitive (see Exercise 8.2-2), the NP-hardness of  implies the NP-hardness of
implies the NP-hardness of  via the reduction
via the reduction  for each NP problem
for each NP problem  .
.
In 1971, Stephen Cook found a first such NP-complete problem: the satisfiability problem of propositional logic,  for short. For many NP-completeness result, it is useful to start from the special problem
for short. For many NP-completeness result, it is useful to start from the special problem  ,
the restriction of the satisfiability problem in which each given
Boolean formula is in conjunctive normal form and each clause contains
exactly three literals.
,
the restriction of the satisfiability problem in which each given
Boolean formula is in conjunctive normal form and each clause contains
exactly three literals.  is also NP-complete.
is also NP-complete.
Definition 8.5 (Satisfiability problem) The Boolean constants false and true are represented by  and
and  . Let
. Let  be Boolean variables, i.e.,
be Boolean variables, i.e.,  for each
for each  . Variables and their negations are called literals. A Boolean formula
. Variables and their negations are called literals. A Boolean formula  is satisfiable if and only if there is an assignment to the variables in
is satisfiable if and only if there is an assignment to the variables in  that makes the formula true. A Boolean formula
that makes the formula true. A Boolean formula  is in conjunctive normal form (CNF, for short) if and only if
is in conjunctive normal form (CNF, for short) if and only if  is of the form
is of the form  , where the
, where the  are literals over
are literals over  . The disjunctions
. The disjunctions  of literals are called the clauses of
of literals are called the clauses of  . A Boolean formula
. A Boolean formula  is in
is in  -CNF if and only if
-CNF if and only if  is in CNF and each clause of
is in CNF and each clause of  contains exactly
contains exactly  literals. Define the following two problems:
literals. Define the following two problems:

Example 8.2 (Boolean formulas) Consider the following two satisfiable Boolean formulas (see also Exercise 8.2-1:

Here,  is in 3-CNF, so
is in 3-CNF, so  is in
is in  . However,
. However,  is not in 3-CNF, since the first clause contains four literals. Thus,
is not in 3-CNF, since the first clause contains four literals. Thus,  is in
is in  but not in
but not in  .
.
Theorem 8.6 states the above-mentioned result of Cook.
Theorem 8.6 (Cook) The problems  and
and  are NP-complete.
are NP-complete.
The proof that  is NP-complete is omitted. The idea is to encode the computation of an arbitrary NP machine
is NP-complete is omitted. The idea is to encode the computation of an arbitrary NP machine  running on input
running on input  into a Boolean formula
into a Boolean formula  such that
such that  is satisfiable if and only if
is satisfiable if and only if  accepts
accepts  .
.
 is a good
starting point for many other NP-completeness results. In fact, in many
cases it is very useful to start with its restriction
is a good
starting point for many other NP-completeness results. In fact, in many
cases it is very useful to start with its restriction  . To give an idea of how such proofs work, we now show that
. To give an idea of how such proofs work, we now show that  , which implies that
, which implies that  is NP-complete. To this end, we need to find a reduction
is NP-complete. To this end, we need to find a reduction  that transforms any given Boolean formula
that transforms any given Boolean formula  in CNF into another Boolean formula
in CNF into another Boolean formula  in
in  -CNF (i.e., with exactly three literals per clause) such that
-CNF (i.e., with exactly three literals per clause) such that

Let  be the given formula with clauses
be the given formula with clauses  . Construct the formula
. Construct the formula  from
from  as follows. The variables of
as follows. The variables of  are
are
-
 's variables
's variables  and
and -
for each clause
 of
of  , a number of additional variables
, a number of additional variables  as needed, where
as needed, where  depends on the structure of
depends on the structure of  according to the case distinction below.
according to the case distinction below.
Now, define  , where each clause
, where each clause  of
of  is constructed from the clause
is constructed from the clause  of
of  as follows. Suppose that
as follows. Suppose that  , where each
, where each  is a literal over
is a literal over  . Distinguish the following four cases.
. Distinguish the following four cases.
 , define
, define 
 , define
, define  .
. , define
, define  , i.e., the
, i.e., the  th clause remains unchanged.
th clause remains unchanged.  , define
, define 
It remains to show that (a) the reduction  is polynomial-time computable, and (b) the equivalence (8.1) is true. Both claims are easy to see; the details are left to the reader as Exercise 8.2-4.
is polynomial-time computable, and (b) the equivalence (8.1) is true. Both claims are easy to see; the details are left to the reader as Exercise 8.2-4.
Thousands of problems have been proven NP-complete by now. A comprehensive collection can be found in the work of Garey und Johnson [81].
Exercises
8.2-1 Find a satisfying assignment each for the Boolean formulas  and
and  from Example 8.2.
from Example 8.2.
8.2-2 Show that the  -reducibility is transitive:
-reducibility is transitive:  .
.
 is in NP.
is in NP. 8.2-4 Consider the reduction  . Prove the following:
. Prove the following:
a. the reduction  is polynomial-time computable, and
is polynomial-time computable, and
b. the equivalence (8.1) holds.
By Theorem 8.6,  and
and  are both NP-complete. Thus, if
are both NP-complete. Thus, if  were in P, it would immediately follow that
were in P, it would immediately follow that  , which is considered unlikely. Thus, it is very unlikely that there is a polynomial-time deterministic algorithm for
, which is considered unlikely. Thus, it is very unlikely that there is a polynomial-time deterministic algorithm for  or
or  .
But what is the runtime of the best deterministic algorithms for them?
And what about randomised algorithms? Let us focus on the problem
.
But what is the runtime of the best deterministic algorithms for them?
And what about randomised algorithms? Let us focus on the problem  in this section.
in this section.
The “naive” deterministic algorithm for  works as follows: Given a Boolean formula
works as follows: Given a Boolean formula  with
with  variables, sequentially check the
variables, sequentially check the  possible assignments to the variables of
possible assignments to the variables of  . Accept if the first satisfying assignment is found, otherwise reject. Obviously, this algorithm runs in time
. Accept if the first satisfying assignment is found, otherwise reject. Obviously, this algorithm runs in time  . Can this upper bound be improved?
. Can this upper bound be improved?
Yes, it can. We will present an slightly better deterministic algorithm for  that still runs in exponential time, namely in time
that still runs in exponential time, namely in time  , where the
, where the  notation neglects polynomial factors as is common for exponential-time algorithms.
notation neglects polynomial factors as is common for exponential-time algorithms.
Footnote. The result presented here is not the best result known, but see Figure 8.7 for further improvements.
The point of such an improvement is that a  algorithm, where
algorithm, where  is a constant, can deal with larger instances than the naive
is a constant, can deal with larger instances than the naive  algorithm in the same amount of time before the exponential growth rate
eventually hits and the running time becomes infeasible. For example,
if
algorithm in the same amount of time before the exponential growth rate
eventually hits and the running time becomes infeasible. For example,
if  then
then  .
Thus, this algorithm can deal with inputs twice as large as the naive
algorithm in the same amount of time. Doubling the size of inputs that
can be handled by some algorithm can be quite important in practice.
.
Thus, this algorithm can deal with inputs twice as large as the naive
algorithm in the same amount of time. Doubling the size of inputs that
can be handled by some algorithm can be quite important in practice.
The deterministic algorithm for  is based on a simple “backtracking” idea. Backtracking is useful for problems whose solutions consist of
is based on a simple “backtracking” idea. Backtracking is useful for problems whose solutions consist of  components each having more than one choice possibility. For example, a solution of
components each having more than one choice possibility. For example, a solution of  is composed of the
is composed of the  truth values of a satisfying assignment, and each such truth value can be either true (represented by
truth values of a satisfying assignment, and each such truth value can be either true (represented by  ) or false (represented by
) or false (represented by  ).
).
The idea is the following. Starting from the initially empty solution (i.e., the empty truth assignment), we seek to construct by recursive calls to our backtracking algorithm, step by step, a larger and larger partial solution until eventually a complete solution is found, if one exists. In the resulting recursion tree, the root is marked by the empty solution, and the leaves are marked with complete solutions of the problem.
Footnote. The inner vertices of the recursion tree represent the recursive calls of the algorithm, its root is the first call, and the algorithm terminates at the leaves without any further recursive call.
If the current branch in the recursion tree is “dead” (which means that the subtree underneath it cannot lead to a correct solution), one can prune this subtree and “backtracks” to pursue another extention of the partial solution constructed so far. This pruning may save time in the end.
Backtracking-SAT(
)
1IF(assigns truth values to all variables of
) 2
THENRETURN3
ELSEIF(makes one of the clauses of
false) 4
THENRETURN0 5“dead branch” 6
ELSEIFBacktracking-SAT7
THENRETURN1 8ELSERETURNBacktracking-SAT
The input of algorithm Backtracking-SAT are a Boolean formula  and a partial assignment
and a partial assignment  to some of the variables of
to some of the variables of  . This algorithm returns a Boolean value: 1, if the partial assignment
. This algorithm returns a Boolean value: 1, if the partial assignment  can be extended to a satisfying assignment to all variables of
can be extended to a satisfying assignment to all variables of  , and 0 otherwise. Partial assignments are here considered to be strings of length at most
, and 0 otherwise. Partial assignments are here considered to be strings of length at most  over the alphabet
over the alphabet  .
.
The first call of the algorithm is Backtracking-SAT  , where
, where  denotes the empty assignment. If it turns out that the partial assignment constructed so far makes one of the clauses of
denotes the empty assignment. If it turns out that the partial assignment constructed so far makes one of the clauses of  false, it cannot be extended to a satisfying assignment of
false, it cannot be extended to a satisfying assignment of  . Thus, the subtree underneath the corresponding vertex in the recursion tree can be pruned; see also Exercise 8.3-1.
. Thus, the subtree underneath the corresponding vertex in the recursion tree can be pruned; see also Exercise 8.3-1.
To estimate the runtime of Backtracking-SAT,
note that this algorithm can be specified so as to select the variables
in an “intelligent” order that minimises the number of steps needed to
evaluate the variables in any clause. Consider an arbitrary, fixed
clause  of the given formula
of the given formula  . Each satisfying assignment
. Each satisfying assignment  of
of  assigns truth values to the three variables in
assigns truth values to the three variables in  . There are
. There are  possibilities to assign a truth value to these variables, and one of
them can be excluded certainly: the assignment that makes
possibilities to assign a truth value to these variables, and one of
them can be excluded certainly: the assignment that makes  false. The corresponding vertex in the recursion tree of
false. The corresponding vertex in the recursion tree of Backtracking-SAT  thus leads to a “dead” branch, so we prune the subtree underneath it.
thus leads to a “dead” branch, so we prune the subtree underneath it.
Depending on the structure of  ,
there may exist further “dead” branches whose subtrees can also be
pruned. However, since we are trying to find an upper bound in the
worst case, we do not consider these additional “dead” subtrees. It
follows that
,
there may exist further “dead” branches whose subtrees can also be
pruned. However, since we are trying to find an upper bound in the
worst case, we do not consider these additional “dead” subtrees. It
follows that

is an upper bound for Backtracking-SAT in the worst case. This bound slightly improves upon the trivial  upper bound of the “naive” algorithm for
upper bound of the “naive” algorithm for  .
.
As mentioned above, the deterministic time complexity of  can be improved even further. For example, Monien and Speckenmeyer [186] proposed a divide-and-conquer algorithm with runtime
can be improved even further. For example, Monien and Speckenmeyer [186] proposed a divide-and-conquer algorithm with runtime  . Dantsin et al. [59] designed a deterministic “local search with restart” algorithm whose runtime is
. Dantsin et al. [59] designed a deterministic “local search with restart” algorithm whose runtime is  , which was further improved by Brueggemann and Kern [34] in 2004 to a
, which was further improved by Brueggemann and Kern [34] in 2004 to a  bound.
bound.
There are also randomised algorithms that have an even better runtime. One will be presented now, a “random-walk” algorithm that is due to Schöning [228].
A random walk can be done on a specific structure, such as in the Euclidean space, on an infinite grid or on a given graph. Here we are interested in random walks occurring on a graph that represents a certain stochastic automaton. To describe such automata, we first introduce the notion of a finite automaton.
A finite automaton can be
represented by its transition graph, whose vertices are the states of
the finite automaton, and the transitions between states are directed
edges marked by the symbols of the alphabet  . One designated vertex is the initial state
in which the computation of the automaton starts. In each step of the
computation, the automaton reads one input symbol (proceeding from left
to right) and moves to the next state along the edge marked by the
symbol read. Some vertices represent final states.
If such a vertex is reached after the entire input has been read, the
automaton accepts the input, and otherwise it rejects. In this way, a
finite automaton accepts a set of input strings, which is called its
language.
. One designated vertex is the initial state
in which the computation of the automaton starts. In each step of the
computation, the automaton reads one input symbol (proceeding from left
to right) and moves to the next state along the edge marked by the
symbol read. Some vertices represent final states.
If such a vertex is reached after the entire input has been read, the
automaton accepts the input, and otherwise it rejects. In this way, a
finite automaton accepts a set of input strings, which is called its
language.
A stochastic automaton  is a finite automaton whose edges are marked by probabilities in addition. If the edge from
is a finite automaton whose edges are marked by probabilities in addition. If the edge from  to
to  in the transition graph of
in the transition graph of  is marked by
is marked by  , where
, where  , then
, then  moves from state
moves from state  to state
to state  with probability
with probability  . The process of random transitions of a stochastic automaton is called a Markov chain in probability theory. Of course, the acceptance of strings by a stochastic automaton depends on the transition probabilities.
. The process of random transitions of a stochastic automaton is called a Markov chain in probability theory. Of course, the acceptance of strings by a stochastic automaton depends on the transition probabilities.
Random-SAT(
)
1FOR
TO

is the number of variables in
2
DOrandomly choose an assignmentunder the uniform distribution 3
FOR
TO4
IF5
THENRETURNthe satisfying assignmentto
6
ELSEchoose a clausewith
7 randomly choose a literal
under the uniform distribution 8 determine the bit
in
assigning
9 swap
to
in
10
RETURN“is not satisfiable”
Here, we are not interested in recognising languages by stochastic
automata, but rather we will use them to describe a random walk by the
randomised algorithm Random-SAT. Given a Boolean formula  with
with  variables,
variables, Random-SAT tries to find a satisfying assignment to  's variables, if one exists.
's variables, if one exists.
On input  ,
, Random-SAT starts by guessing a random initial assignment  , where each bit of
, where each bit of  takes on the value
takes on the value  and
and  with probability
with probability  . Suppose
. Suppose  is satisfiable. Let
is satisfiable. Let  be an arbitrary fixed assignment of
be an arbitrary fixed assignment of  . Let
. Let  be a random variable that expresses the Hamming distance between
be a random variable that expresses the Hamming distance between  and
and  , i.e.,
, i.e.,  gives the number of bits in which
gives the number of bits in which  and
and  differ. Clearly,
differ. Clearly,  can take on values
can take on values  and is distributed according to the binomial distribution with parameters
and is distributed according to the binomial distribution with parameters  and
and  . That is, the probability for
. That is, the probability for  is exactly
is exactly  .
.
Random-SAT now checks whether the initial assignment  already satisfies
already satisfies  , and if so, it accepts. Otherwise, if
, and if so, it accepts. Otherwise, if  does not satisfy
does not satisfy  , there must exist a clause in
, there must exist a clause in  not satisfied by
not satisfied by  .
. Random-SAT
now picks any such clause, randomly chooses under the uniform
distribution some literal in this clause, and “flips” the corresponding
bit in the current assignment  . This procedure is repeated
. This procedure is repeated  times. If the current assignment
times. If the current assignment  still does not satisfy
still does not satisfy  ,
, Random-SAT restarts with a new initial assignment, and repeats this entire procedure  times, where
times, where  .
.
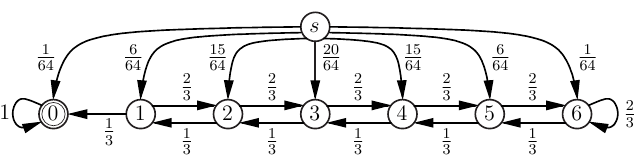
Figure 8.6 shows a stochastic automaton  , whose edges are not marked by symbols but only by transition probabilities. The computation of
, whose edges are not marked by symbols but only by transition probabilities. The computation of Random-SAT on input  can be viewed as a random walk on
can be viewed as a random walk on  as follows. Starting from the initial state
as follows. Starting from the initial state  , which will never be reached again later,
, which will never be reached again later, Random-SAT  first moves to one of the states
first moves to one of the states  according to the binomial distribution with parameters
according to the binomial distribution with parameters  and
and  . This is shown in the upper part of Figure 8.6 for a formula with
. This is shown in the upper part of Figure 8.6 for a formula with  variables. Reaching such a state
variables. Reaching such a state  means that the randomly chosen initial assignment
means that the randomly chosen initial assignment  and the fixed satisfying assignment
and the fixed satisfying assignment  have Hamming distance
have Hamming distance  . As long as
. As long as  ,
, Random-SAT  changes one bit
changes one bit  to
to  in the current assignment
in the current assignment  , searching for a satisfying assignment in each iteration of the inner
, searching for a satisfying assignment in each iteration of the inner  loop. In the random walk on
loop. In the random walk on  , this corresponds to moving one step to the left to state
, this corresponds to moving one step to the left to state  or moving one step to the right to state
or moving one step to the right to state  , where only states less than or equal to
, where only states less than or equal to  can be reached.
can be reached.
The fixed assignment  satisfies
satisfies  , so it sets at least one literal in each clause of
, so it sets at least one literal in each clause of  to true. If we fix exactly one of the literals satisfied by
to true. If we fix exactly one of the literals satisfied by  in each clause, say
in each clause, say  , then
, then Random-SAT  makes a step to the left if and only if
makes a step to the left if and only if  was chosen by
was chosen by Random-SAT  . Hence, the probability of moving from state
. Hence, the probability of moving from state  to state
to state  is 1/3, and the probability of moving from state
is 1/3, and the probability of moving from state  to state
to state  is 2/3.
is 2/3.
If the state  is reached eventually after at most
is reached eventually after at most  iterations of this process,
iterations of this process,  and
and  have Hamming distance
have Hamming distance  , so
, so  satisfies
satisfies  and
and Random-SAT  returns
returns  and halts accepting. Of course, one might also hit a satisfying assignment (distinct from
and halts accepting. Of course, one might also hit a satisfying assignment (distinct from  ) in some state
) in some state  . But since this would only increase the acceptance probability, we neglect this possibility here.
. But since this would only increase the acceptance probability, we neglect this possibility here.
If this process is repeated  times unsuccessfully, then the initial assignment
times unsuccessfully, then the initial assignment  was chosen so badly that
was chosen so badly that Random-SAT
now dumps it, and restarts the above process from scratch with a new
initial assignment. The entire procedure is repeated at most  times, where
times, where  . If it is still unsuccessful after
. If it is still unsuccessful after  trials,
trials, Random-SAT rejects its input.
Since the probability of moving away from state  to the right is larger than the probability of moving toward
to the right is larger than the probability of moving toward  to the left, one might be tempted to think that the success probability of
to the left, one might be tempted to think that the success probability of Random-SAT is very small. However, one should not underestimate the chance that one already after the initial step from  reaches a state close to
reaches a state close to  . The closer to
. The closer to  the random walk starts, the higher is the probability of reaching
the random walk starts, the higher is the probability of reaching  by random steps to the left or to the right.
by random steps to the left or to the right.
We only give a rough sketch of estimating the success probability (assuming that  is satisfiable) and the runtime of
is satisfiable) and the runtime of Random-SAT  . For convenience, suppose that 3 divides
. For convenience, suppose that 3 divides  . Let
. Let  be the probability for the event that
be the probability for the event that Random-SAT  reaches the state
reaches the state  within
within  steps after the initial step, under the condition that it reaches some state
steps after the initial step, under the condition that it reaches some state  with the initial step from
with the initial step from  . For example, if the state
. For example, if the state  is reached with the initial step and if no more than
is reached with the initial step and if no more than  steps are done to the right, then one can still reach the final state
steps are done to the right, then one can still reach the final state  by a total of at most
by a total of at most  steps. If one does more than
steps. If one does more than  steps to the right starting from state
steps to the right starting from state  , then the final state cannot be reached within
, then the final state cannot be reached within  steps. In general, starting from state
steps. In general, starting from state  after the initial step, no more than
after the initial step, no more than  steps to the right may be done. As noted above, a step to the right is done with probability
steps to the right may be done. As noted above, a step to the right is done with probability  , and a step to the left is done with probability
, and a step to the left is done with probability  . It follows that
. It follows that

Now, let  be the probability for the event that
be the probability for the event that Random-SAT  reaches some state
reaches some state  with the initial step. Clearly, we have
with the initial step. Clearly, we have

Finally, let  be the probability for the event that
be the probability for the event that Random-SAT  reaches the final state
reaches the final state  within the inner
within the inner  loop. Of course, this event can occur also when starting from a state
loop. Of course, this event can occur also when starting from a state  . Thus,
. Thus,
Approximating this sum by the entropy function and estimating the binomial coefficients from (8.2) and (8.3) in the single terms by Stirling's formula, we obtain the lower bound  for
for  .
.
To reduce the error probability, Random-SAT performs a total of  independent trials, each starting with a new initial assignment
independent trials, each starting with a new initial assignment  . For each trial, the probability of success (i.e., the probability of finding a satisfying assignment of
. For each trial, the probability of success (i.e., the probability of finding a satisfying assignment of  , if one exists) is at least
, if one exists) is at least  , so the error is bounded by
, so the error is bounded by  . Since the trials are independent, these error probabilities multiply, which gives an error of
. Since the trials are independent, these error probabilities multiply, which gives an error of  . Thus, the total probabilitiy of success of
. Thus, the total probabilitiy of success of Random-SAT  is at least
is at least  if
if  is satisfiable. On the other hand,
is satisfiable. On the other hand, Random-SAT  does not make any error at all if
does not make any error at all if  is unsatisfiable; in this case, the output is : “
is unsatisfiable; in this case, the output is : “  is not satisfiable”.
is not satisfiable”.
The particular choice of this value of  can be explained as follows. The runtime of a randomised algorithm, which performs independent trials such as
can be explained as follows. The runtime of a randomised algorithm, which performs independent trials such as Random-SAT  , is roughly reciprocal to the success probability of one trial,
, is roughly reciprocal to the success probability of one trial,  . In particular, the error probability (i.e., the probability that that in none of the
. In particular, the error probability (i.e., the probability that that in none of the  trials a satisfying assignment of
trials a satisfying assignment of  is found even though
is found even though  is satisfiable) can be estimated by
is satisfiable) can be estimated by  . If a fixed error of
. If a fixed error of  is to be not exceeded, it is enough to choose
is to be not exceeded, it is enough to choose  such that
such that  ; equivalently, such that
; equivalently, such that  . Up to constant factors, this can be accomplished by choosing
. Up to constant factors, this can be accomplished by choosing  . Hence, the runtime of the algorithm is in
. Hence, the runtime of the algorithm is in  .
.
Exercises
8.3-1 Start the algorithm Backtracking-SAT for the Boolean formula  and construct step by step a satisfying assignment of
and construct step by step a satisfying assignment of  . How does the resulting recursion tree look like?
. How does the resulting recursion tree look like?
In this section, we need some of the group-theoretic and
graph-theoretic foundations presented in Section 7.1.3 In particular,
recall the notion of permutation group from Definition 7.6 and the
graph isomorphism problem ( , for short) and the graph automorphism problem (
, for short) and the graph automorphism problem ( ,
for short) from Definition 7.8; see also Example 7.4 in Chapter 7. We
start by providing some more background from complexity theory.
,
for short) from Definition 7.8; see also Example 7.4 in Chapter 7. We
start by providing some more background from complexity theory.
In Section 8.2, we have seen that the problems  and
and  are NP-complete. Clearly,
are NP-complete. Clearly,  if and only if every NP problem (including the NP-complete problems) is in P, which in turn is true if and only if some NP-complete problem is in P. So, no NP-complete problem can be in P if
if and only if every NP problem (including the NP-complete problems) is in P, which in turn is true if and only if some NP-complete problem is in P. So, no NP-complete problem can be in P if  . An interesting question is whether, under the plausible assumption that
. An interesting question is whether, under the plausible assumption that  , every NP problem is either in P or NP-complete. Or, assuming
, every NP problem is either in P or NP-complete. Or, assuming  , can there exist NP problems that are neither in P nor NP-complete? A result by Ladner [157] answers this question.
, can there exist NP problems that are neither in P nor NP-complete? A result by Ladner [157] answers this question.
Theorem 8.7 (Ladner) If  then there exist sets in NP that are neither in P nor NP-complete.
then there exist sets in NP that are neither in P nor NP-complete.
The problems constructed in the proof of Theorem 8.7
are not overly natural problems. However, there are also good
candidates of “natural” problems that are neither in P nor NP-complete.
One such candidate is the graph isomorphism problem. To provide some
evidence for this claim, we now define two hierarchies of complexity
classes, the low hierarchy and the high hierarchy, both introduced by Schöning [226]. First, we need to define the polynomial hierarchy, which builds upon NP. And to this end, we need a more flexible reducibility than the (polynomial-time) many-one reducibility  from Definition 8.4, namely the Turing reducibility
from Definition 8.4, namely the Turing reducibility  . We will also define the (polynomial-time) nondeterministic Turing reducibility,
. We will also define the (polynomial-time) nondeterministic Turing reducibility,  , and the (polynomial-time) strong nondeterministic Turing reducibility,
, and the (polynomial-time) strong nondeterministic Turing reducibility,  .
These two reducibilities are important for the polynomial hierarchy and
for the high hierarchy, respectively. Turing reducibilities are based
on the notion of oracle Turing machines, which we now define.
.
These two reducibilities are important for the polynomial hierarchy and
for the high hierarchy, respectively. Turing reducibilities are based
on the notion of oracle Turing machines, which we now define.
Definition 8.8 (Oracle Turing machine) An oracle set is a set of strings. An oracle Turing machine  , with oracle
, with oracle  , is a Turing machine that has a special worktape, which is called the oracle tape or query tape. In addition to other states,
, is a Turing machine that has a special worktape, which is called the oracle tape or query tape. In addition to other states,  contains a special query state,
contains a special query state,  , and the two answer states
, and the two answer states  and
and  . During a computation on some input, if
. During a computation on some input, if  is not in the query state
is not in the query state  , it works just like a regular Turing machine. However, when
, it works just like a regular Turing machine. However, when  enters the query state
enters the query state  , it interrupts its computation and queries its oracle about the string
, it interrupts its computation and queries its oracle about the string  currently written on the oracle tape. Imagine the oracle
currently written on the oracle tape. Imagine the oracle  as some kind of “black box”:
as some kind of “black box”:  answers the query of whether or not it contains
answers the query of whether or not it contains  within one step of
within one step of  's computation, regardless of how difficult it is to decide the set
's computation, regardless of how difficult it is to decide the set  . If
. If  , then
, then  changes its current state into the new state
changes its current state into the new state  and continues its computation. Otherwise, if
and continues its computation. Otherwise, if  ,
,  continues its computation in the new state
continues its computation in the new state  . We say that the computation of
. We say that the computation of  on input
on input  is performed relative to the oracle
is performed relative to the oracle  , and we write
, and we write  .
.
The language accepted by  is denoted
is denoted  . We say a language
. We say a language  is represented by an oracle Turing machine
is represented by an oracle Turing machine  if and only if
if and only if  . We say a class
. We say a class  of languages is relativizable if and only if it can be represented by oracle Turing machines relative to the empty oracle. For any relativizable class
of languages is relativizable if and only if it can be represented by oracle Turing machines relative to the empty oracle. For any relativizable class  and for any oracle
and for any oracle  , define the class
, define the class  relative to
relative to  by
by

For any class  of oracle sets, define
of oracle sets, define  .
.
Let NPOTM (respectively, DPOTM) be a shorthand for nondeterministic (respectively, deterministic) polynomial-time oracle Turing machine. For example, the following classes can be defined:

For the empty oracle set  , we obtain the unrelativized classes
, we obtain the unrelativized classes  and
and  , and we then write NPTM instead of NPOTM and DPTM instead of DPOTM.
, and we then write NPTM instead of NPOTM and DPTM instead of DPOTM.
In particular, oracle Turing machines can be used for prefix search. Let us consider an example.
Example 8.3 (Prefix search by an oracle Turing machine)
Suppose we wish to find the smallest solution of the graph
isomorphism problem, which is in NP; see Definition 7.8 in Subsection
7.1.3. Let  and
and  be two given graphs with
be two given graphs with  vertices each. An isomorphism between
vertices each. An isomorphism between  and
and  is called a solution of “
is called a solution of “  ”. The set of isomorphisms between
”. The set of isomorphisms between  and
and  ,
,  , contains all solutions of “
, contains all solutions of “  ”.
”.
Our goal is to find the lexicographically smallest solution if  ; otherwise, we output the empty string
; otherwise, we output the empty string  to indicate that
to indicate that  . That is, we wish to compute the function
. That is, we wish to compute the function  defined by
defined by  if
if  , and
, and  if
if  , where the minimum is to be taken according to the lexicographic order on
, where the minimum is to be taken according to the lexicographic order on  . More precisely, we view a permutation
. More precisely, we view a permutation  as the string
as the string  of length
of length  over the alphabet
over the alphabet  , and we write
, and we write  for
for  if and only if there is a
if and only if there is a  such that
such that  for all
for all  and
and  .
.
From a permutation  , one obtains a partial permutation by cancelling some pairs
, one obtains a partial permutation by cancelling some pairs  . A partial permutation can be represented by a string over the alphabet
. A partial permutation can be represented by a string over the alphabet  , where
, where  indicates an undefined position. Let
indicates an undefined position. Let  . A prefix of length
. A prefix of length  of
of  is a partial permutation of
is a partial permutation of  containing each pair
containing each pair  with
with  , but none of the pairs
, but none of the pairs  with
with  . In particular, for
. In particular, for  , the empty string
, the empty string  is the (unique) length
is the (unique) length  prefix of
prefix of  . For
. For  , the total permutation
, the total permutation  is the (unique) length
is the (unique) length  prefix of itself. Suppose that
prefix of itself. Suppose that  is a prefix of length
is a prefix of length  of
of  and that
and that  is a string over
is a string over  of length
of length  with none of the
with none of the  occurring in
occurring in  . Then,
. Then,  denotes the partial permutation that extends
denotes the partial permutation that extends  by the pairs
by the pairs  . If in addition
. If in addition  for
for  , then
, then  is also a prefix of
is also a prefix of  . For our prefix search, given two graphs
. For our prefix search, given two graphs  and
and  , we define the set of prefixes of the isomorphisms in
, we define the set of prefixes of the isomorphisms in  by
by

Note that, for  , the empty string
, the empty string  does not encode a permutation in
does not encode a permutation in  . Furthermore,
. Furthermore,  if and only if
if and only if  , which in turn is true if and only if
, which in turn is true if and only if  .
.
Starting from the empty string, we will construct, bit by bit, the
smallest isomorphism between the two given graphs (if there exists
any). We below present an DPOTM  that, using the NP set
that, using the NP set  as its oracle, computes the function
as its oracle, computes the function  by prefix search; see also Exercise 8.4-2. Denoting the class of functions computable in polynomial time by
by prefix search; see also Exercise 8.4-2. Denoting the class of functions computable in polynomial time by  , we thus have shown that
, we thus have shown that  is in
is in  . Since
. Since  is in NP (see Exercise 8.4-2), it follows that
is in NP (see Exercise 8.4-2), it follows that  is in
is in  .
.
N-Pre-Iso(
)
1IF2
THENRETURN3
ELSE4
5
WHILE

and
have
vertices each. 6
DO7
WHILE8
DO9
10
11
RETURN
Example 8.3 shows that also Turing machines computing functions can be equipped with an oracle, and that also function classes such as  can be relativizable. We now return to oracle machines accepting
languages and use them to define several reducibilities. All
reducibilities considered here are polynomial-time computable.
can be relativizable. We now return to oracle machines accepting
languages and use them to define several reducibilities. All
reducibilities considered here are polynomial-time computable.
Definition 8.9 (Turing reducibilities) Let  be a binary alphabet, let
be a binary alphabet, let  and
and  be sets of strings over
be sets of strings over  , and let
, and let  be any complexity class. The set of complements of sets in
be any complexity class. The set of complements of sets in  is defined by
is defined by  .
.
Define the following reducibilities:
 Turing reducibility:
Turing reducibility:  for some DPOTM
for some DPOTM  .
.
 Nondeterministic Turing reducibility:
Nondeterministic Turing reducibility:  for some NPOTM
for some NPOTM  .
.
 Strong nondeterministic Turing reducibility:
Strong nondeterministic Turing reducibility:  .
.
 Let
Let  be one of the reducibilities defined above. We call a set
be one of the reducibilities defined above. We call a set 
 -hard for
-hard for  if and only if
if and only if  for each set
for each set  . A set
. A set  is said to be
is said to be  -complete in
-complete in  if and only if
if and only if  is
is  -hard for
-hard for  and
and  .
.

 is the closure of
is the closure of  under the
under the  -reducibility.
-reducibility.

 is the closure of
is the closure of  under the
under the  -reducibility.
-reducibility.
Using the  -reducibility and the
-reducibility and the  -reducibility introduced in Definition 8.9, we now define the polynomial hierarchy, and the low and the high hierarchy within NP.
-reducibility introduced in Definition 8.9, we now define the polynomial hierarchy, and the low and the high hierarchy within NP.
Definition 8.10 (Polynomial hierarchy) Define the polynomial hierarchy PH inductively as follows:  ,
,  ,
,  and
and  for
for  , and
, and  .
.
In particular,  and
and  and
and  . The following theorem, which is stated without proof, provides some properties of the polynomial hierarchy, see Problem 8-2.
. The following theorem, which is stated without proof, provides some properties of the polynomial hierarchy, see Problem 8-2.
Theorem 8.11 (Meyer and Stockmeyer) For all  holds:
holds:
1.  .
.
2.  ,
,  ,
,  , and
, and  are closed under
are closed under  -reductions.
-reductions.  is even closed under
is even closed under  -reductions.
-reductions.
3.  contains exactly those sets
contains exactly those sets  for which there exist a set
for which there exist a set  in P and a polynomial
in P and a polynomial  such that for each
such that for each  :
:

where the quantifiers  and
and  are polynomially length-bounded, and
are polynomially length-bounded, and  if
if  is odd, and
is odd, and  if
if  is even.
is even.
4. If  for some
for some  , then
, then  collapses to
collapses to  .
.
5. If  for some
for some  , then
, then  collapses to
collapses to  .
.
6. There are  -complete problems for each of the classes
-complete problems for each of the classes  ,
,  , and
, and  . In contrast, if
. In contrast, if  has a
has a  -complete problem, then
-complete problem, then  collapses to a finite level, i.e.,
collapses to a finite level, i.e.,  for some
for some  .
.
Definition 8.12 (Low hierarchy and high hierarchy within NP) For  , define the
, define the  th level of the
th level of the
 low hierarchy
low hierarchy  in NP by
in NP by  ;
;
 high hierarchy
high hierarchy  in NP by
in NP by  .
.
Informally put, a set  is in
is in  if and only if it is useless as an oracle for a
if and only if it is useless as an oracle for a  computation. All information contained in
computation. All information contained in  can be computed by the
can be computed by the  machine itself without the help of an oracle. On the other hand, a set
machine itself without the help of an oracle. On the other hand, a set  in
in  is so rich and provides so useful information that the computational power of a
is so rich and provides so useful information that the computational power of a  machine is increased by the maximum amount an NP set can provide: it
“jumps” to the next level of the polynomial hierarchy. That is, by
using an oracle
machine is increased by the maximum amount an NP set can provide: it
“jumps” to the next level of the polynomial hierarchy. That is, by
using an oracle  from
from  , a
, a  machine can simulate any
machine can simulate any  computation. Thus,
computation. Thus,  is as useful for a
is as useful for a  machine as any NP-complete set.
machine as any NP-complete set.
For  , the question of whether or not
, the question of whether or not  is nothing other than the P-versus-NP question. Theorem 8.13 lists some important properties of these hierarchies, omitting the proofs, see [226] and Exercise 8-2. For the class
is nothing other than the P-versus-NP question. Theorem 8.13 lists some important properties of these hierarchies, omitting the proofs, see [226] and Exercise 8-2. For the class  mentioned in the first item of Theorem 8.13,
the reader is referred to the definition of the Arthur-Merlin hierarchy
introduced in Subsection 7.5.1; cf. Definition 7.16. Ladner's theorem
(Theorem 8.7) is a special case (for
mentioned in the first item of Theorem 8.13,
the reader is referred to the definition of the Arthur-Merlin hierarchy
introduced in Subsection 7.5.1; cf. Definition 7.16. Ladner's theorem
(Theorem 8.7) is a special case (for  ) of item 7 in Theorem 8.13.
) of item 7 in Theorem 8.13.
1.  and
and  and
and  .
.
2.  .
.
3.  .
.
4.  .
.
5.  .
.
6. For each  ,
,  is nonempty if and only if
is nonempty if and only if  .
.
7. For each  , NP contains sets that are neither in
, NP contains sets that are neither in  nor in
nor in  if and only if
if and only if  .
.
8. There exist sets in NP that are neither in  nor in
nor in  if and only if
if and only if  is a strictly infinite hierarchy, i.e., if and only if
is a strictly infinite hierarchy, i.e., if and only if  does not collapse to a finite level.
does not collapse to a finite level.
We now turn to the result that the graph isomorphism problem ( ) is in
) is in  , the second level of the low hierarchy. This result provides strong evidence against the NP-completeness of
, the second level of the low hierarchy. This result provides strong evidence against the NP-completeness of  , as can be seen as follows. If
, as can be seen as follows. If  were NP-complete, then
were NP-complete, then  would be in
would be in  , since by Theorem 8.13
, since by Theorem 8.13  contains exactly the
contains exactly the  -complete NP sets and in particular the
-complete NP sets and in particular the  -complete sets in NP. Again by Theorem 8.13, we have that
-complete sets in NP. Again by Theorem 8.13, we have that  is nonempty if and only if
is nonempty if and only if  collapses to
collapses to  , which is considered very unlikely.
, which is considered very unlikely.
To prove the lowness of the graph isomorphism problem, we first need
a technical prerequisite, the so-called hashing lemma, stated here as
Lemma 8.15. Hashing is method
widely used in computer science for dynamic data management. The idea
is the following. Assign to every data set some (short) key in a unique
manner. The set of all potential keys, called the universe  , is usually very large. In contrast, the set
, is usually very large. In contrast, the set  of those keys actually used is often much smaller. A hash function
of those keys actually used is often much smaller. A hash function  maps the elements of
maps the elements of  to the hash table
to the hash table  . Hash functions are many-to-one mappings. That is, distinct keys from
. Hash functions are many-to-one mappings. That is, distinct keys from  can be mapped to the same address in
can be mapped to the same address in  . However, if possible, one wishes to map two distinct keys from
. However, if possible, one wishes to map two distinct keys from  to distinct addresses in
to distinct addresses in  .
That is, one seeks to avoid collisions on the set of keys actually
used. If possible, a hash function thus should be injective on
.
That is, one seeks to avoid collisions on the set of keys actually
used. If possible, a hash function thus should be injective on  .
.
Among the various known hashing techniques, we are here interested in universal hashing, which was introduced by Carter and Wegman [41]
in 1979. The idea is to randomly choose a hash function from a suitable
family of hash functions. This method is universal in the sense that it
does no longer depend on a particular set  of keys actually used. Rather, it seeks to avoid collisions with high probability on all sufficiently small sets
of keys actually used. Rather, it seeks to avoid collisions with high probability on all sufficiently small sets  . The probability here is with respect to the random choice of the hash function.
. The probability here is with respect to the random choice of the hash function.
In what follows, we assume that keys are encoded as strings over the alphabet  . The set of all length
. The set of all length  strings in
strings in  is denoted by
is denoted by  .
.
Definition 8.14 (Hashing) Let  , and let
, and let  and
and  be positive integers with
be positive integers with  . A hash function
. A hash function  is a linear mapping determined by a Boolean
is a linear mapping determined by a Boolean  matrix
matrix  , where
, where  . For
. For  and
and  , the
, the  th bit of
th bit of  in
in  is given by
is given by  , where
, where  denotes the logical exclusive-or operation, i.e.,
denotes the logical exclusive-or operation, i.e.,

Let  be a family of hash functions for the parameters
be a family of hash functions for the parameters  and
and  :
:

On  , we assume the uniform distribution: A hash function
, we assume the uniform distribution: A hash function  is chosen from
is chosen from  by picking the bits
by picking the bits  in
in  independently and uniformly distributed.
independently and uniformly distributed.
Let  . For any subfamily
. For any subfamily  of
of  , we say there is a collision on
, we say there is a collision on  if
if

Otherwise,  is said to be collision-free on
is said to be collision-free on  .
.
A collision on  means that none of the hash functions in a subfamily
means that none of the hash functions in a subfamily  is injective on
is injective on  . The following lemma says that, if
. The following lemma says that, if  is sufficiently small, a randomly chosen subfamily of
is sufficiently small, a randomly chosen subfamily of  must be collision-free. In contrast, if
must be collision-free. In contrast, if  is too large, collisions cannot be avoided. The proof of Lemma 8.15 is omitted.
is too large, collisions cannot be avoided. The proof of Lemma 8.15 is omitted.
Lemma 8.15 (Hashing lemma) Let  be fixed parameters, where
be fixed parameters, where  . Let
. Let  and let
and let  be a family of hash functions randomly chosen from
be a family of hash functions randomly chosen from  under the uniform distribution. Let
under the uniform distribution. Let

be the event that for  a collision occurs on
a collision occurs on  . Then, the following two statements hold:
. Then, the following two statements hold:
1. If  , then
, then  occurs with probability at most
occurs with probability at most  .
.
2 . If  , then
, then  occurs with probability
occurs with probability  .
.
In Section 7.5, the Arthur-Merlin hierarchy has been defined, and it
was mentioned that this hierarchy collapses to its second level. Here,
we are interested in the class  , cf. Definition 7.16 in Subsection 7.5.1.
, cf. Definition 7.16 in Subsection 7.5.1.
Theorem 8.16 (Schöning)  is in
is in  .
.
Proof. By Theorem 8.13, every  set is in
set is in  . Thus, to prove that
. Thus, to prove that  in
in  , it is enough to show that
, it is enough to show that  is in
is in  . Let
. Let  and
and  be two graphs with
be two graphs with  vertices each. We wish to apply Lemma 8.15. A first idea is to use
vertices each. We wish to apply Lemma 8.15. A first idea is to use

as the set  from that lemma. By Lemma 7.11, we have
from that lemma. By Lemma 7.11, we have  if
if  , and
, and  if
if  .
.
The  machine we wish to construct for
machine we wish to construct for  is polynomial-time bounded. Thus, the parameters
is polynomial-time bounded. Thus, the parameters  and
and  from the hashing lemma must be polynomial in
from the hashing lemma must be polynomial in  . So, to apply Lemma 7.11, we would have to choose a polynomial
. So, to apply Lemma 7.11, we would have to choose a polynomial  such that
such that

This would guarantee that the set  would be large enough to tell two isomorphic graphs
would be large enough to tell two isomorphic graphs  and
and  apart from two nonisomorphic graphs
apart from two nonisomorphic graphs  and
and  . Unfortunately, it is not possible to find a polynomial
. Unfortunately, it is not possible to find a polynomial  that satisfies (8.4). Thus, we define a different set
that satisfies (8.4). Thus, we define a different set  , which yields a gap large enough to distinguish isomorphic graphs from nonisomorphic graphs.
, which yields a gap large enough to distinguish isomorphic graphs from nonisomorphic graphs.
Define  . Now, (8.4) changes to
. Now, (8.4) changes to

and this inequality can be satisfied by choosing  , which is polynomially in
, which is polynomially in  as desired.
as desired.
Construct a  machine
machine  for
for  as follows. Given the graphs
as follows. Given the graphs  and
and  each having
each having  vertices,
vertices,  first computes the parameter
first computes the parameter  . The set
. The set  contains
contains  -tuples of pairs each having the form
-tuples of pairs each having the form  , where
, where  is a graph with
is a graph with  vertices, and where
vertices, and where  is a permutation in the automorphism group
is a permutation in the automorphism group  . The elements of
. The elements of  can be suitably encoded as strings over the alphabet
can be suitably encoded as strings over the alphabet  , for a suitable polynomial
, for a suitable polynomial  . All computations performed so far are deterministic.
. All computations performed so far are deterministic.
Then,  performs Arthur's probabilistic move by randomly choosing a family
performs Arthur's probabilistic move by randomly choosing a family  of hash functions from
of hash functions from  under the uniform distribution. Each hash function
under the uniform distribution. Each hash function  is represented by a Boolean
is represented by a Boolean  matrix. Thus, the
matrix. Thus, the  hash functions
hash functions  in
in  can be represented as a string
can be represented as a string  of length
of length  for a suitable polynomial
for a suitable polynomial  . Modify the collision predicate
. Modify the collision predicate  defined in the hashing lemma as follows:
defined in the hashing lemma as follows:

Note that the  quantifier in
quantifier in  ranges over only polynomially many
ranges over only polynomially many  and can thus be evaluated in deterministic polynomial time. It follows that the two
and can thus be evaluated in deterministic polynomial time. It follows that the two  quantifiers in
quantifiers in  can be merged into a single polynomially length-bounded
can be merged into a single polynomially length-bounded  quantifier. By Theorem 8.11,
quantifier. By Theorem 8.11,  is a set in
is a set in  . Let
. Let  be an NPTM for
be an NPTM for  . For the string
. For the string  that encodes
that encodes  randomly picked hash functions from
randomly picked hash functions from  ,
,  now simulates the computation of
now simulates the computation of  . This corresponds to Merlin's move. Finally,
. This corresponds to Merlin's move. Finally,  accepts its input
accepts its input  if and only if
if and only if  accepts.
accepts.
We now estimate the probability (taken over the random choice of the hash functions in  that
that  accepts its input
accepts its input  . If
. If  and
and  isomorphic, then
isomorphic, then  by Lemma 7.11. Inequality (8.5) implies
by Lemma 7.11. Inequality (8.5) implies  . By Lemma 8.15, the probability that
. By Lemma 8.15, the probability that  is in
is in  (and that
(and that  thus accepts) is at most
thus accepts) is at most  . However, if
. However, if  and
and  are nonisomorphic, Lemma 7.11 implies that
are nonisomorphic, Lemma 7.11 implies that  . Inequality (8.5) now gives
. Inequality (8.5) now gives  . By Lemma 8.15, the probability that
. By Lemma 8.15, the probability that  is in
is in  and
and  thus accepts is
thus accepts is  . It follows that
. It follows that  is in
is in  as desired.
as desired.
The probabilistic complexity class RP was introduced in Definition
7.14 in Subsection 7.3.1. In this section, two other probabilistic
complexity classes are important that we will now define:  and
and  , which stand for Probabilistic Polynomial Time and Stoic Probabilistic Polynomial Time, respectively.
, which stand for Probabilistic Polynomial Time and Stoic Probabilistic Polynomial Time, respectively.
Definition 8.17 (PP and SPP) The class  contains exactly those problems
contains exactly those problems  for which there exists an NPTM
for which there exists an NPTM  such that for each input
such that for each input  : If
: If  then
then  accepts with probability at least
accepts with probability at least  , and if
, and if  then
then  accepts with probability less than
accepts with probability less than  .
.
For any NPTM  running on input
running on input  , let
, let  denote the number of accepting computation paths of
denote the number of accepting computation paths of  and let
and let  denote the number of rejecting computation paths of
denote the number of rejecting computation paths of  . Define
. Define  .
.
The class  contains exactly those problems
contains exactly those problems  for which there exists an NPTM
for which there exists an NPTM  such that for each input
such that for each input  :
:  and
and  .
.
In other words, an  machine is “stoic” in the sense that its “gap” (i.e., the difference
between its accepting and rejecting computation paths) can take on only
two out of an exponential number of possible values, namely
machine is “stoic” in the sense that its “gap” (i.e., the difference
between its accepting and rejecting computation paths) can take on only
two out of an exponential number of possible values, namely  and
and  . Unlike
. Unlike  ,
,  is a so-called “promise class”. since an
is a so-called “promise class”. since an  machine
machine  “promises” that
“promises” that  for each
for each  .
.
The notion of lowness can be defined for any relativizable complexity class  : A set
: A set  is said to be
is said to be  -low if and only if
-low if and only if  . In particular, for each
. In particular, for each  , the
, the  th level
th level  of the low hierarchy within NP (see Definition 8.12) contains exactly the NP sets that are
of the low hierarchy within NP (see Definition 8.12) contains exactly the NP sets that are  -low. It is known that all sets in
-low. It is known that all sets in  are
are  -low. This and other useful properties of
-low. This and other useful properties of  are listed in the following theorem without proof; see also [71], [150], [151].
are listed in the following theorem without proof; see also [71], [150], [151].
1.  is
is  -low, i.e.,
-low, i.e.,  .
.
2.  is self-low, i.e.,
is self-low, i.e.,  .
.
3. Let  be a set in NP via some NPTM
be a set in NP via some NPTM  and let
and let  be a set in
be a set in  via some NPOTM
via some NPOTM  such that, for each input
such that, for each input  ,
,  asks only queries
asks only queries  satisfying
satisfying  . Then,
. Then,  is in
is in  .
.
4. Let  be a set in NP via some NPTM
be a set in NP via some NPTM  and let
and let  be a function in
be a function in  via some DPOTM
via some DPOTM  such that, for each input
such that, for each input  ,
,  asks only queries
asks only queries  satisfying
satisfying  . Then,
. Then,  is in
is in  .
.
The following theorem says that the lexicographically smallest
permutation in a right coset (see Definition 7.6 in Section 7.1.3) can
be determined efficiently. The lexicographic order on  is defined in Example 8.3.
is defined in Example 8.3.
Theorem 8.19 Let  be a permutation group with
be a permutation group with  and let
and let  be a permutation in
be a permutation in  . There is a polynomial-time algorithm that, given
. There is a polynomial-time algorithm that, given  , computes the lexicographically smallest permutation in the right coset
, computes the lexicographically smallest permutation in the right coset  of
of  in
in  .
.
Proof. We now state our algorithm LERC for computing the lexicographically smallest permutation in the right coset  of
of  in
in  , where the permutation group
, where the permutation group  is given by a generator
is given by a generator  , see Definition 7.6 in Subsection 7.1.3.
, see Definition 7.6 in Subsection 7.1.3.
LERC(
)
1 compute the towerof stabilisers in
2
3
FOR
TO4
DO5 compute the element
in the orbit
for which
is minimum 6 compute a permutation
in
such that
7
8
RETURN
By Theorem 7.7, the tower  of stabilisers of
of stabilisers of  can be computed in polynomial time. More precisely, for each
can be computed in polynomial time. More precisely, for each  with
with  , the complete right transversals
, the complete right transversals 
 in
in  are determined, and thus a strong generator
are determined, and thus a strong generator  of
of  .
.
Note that  and
and  . Thus, to prove that the algorithm works correctly, it is enough to show that for each
. Thus, to prove that the algorithm works correctly, it is enough to show that for each  with
with  , the lexicographically smallest permutation of
, the lexicographically smallest permutation of  is contained in
is contained in  . By induction, it follows that
. By induction, it follows that  also contains the lexicographically smallest permutation of
also contains the lexicographically smallest permutation of  . Thus, algorithm
. Thus, algorithm LERC indeed outputs the lexicographically smallest permutation of  of
of  .
.
To prove the above claim, let us denote the orbit of an element  in a permutation group
in a permutation group  by
by  . Let
. Let  be the permutation in
be the permutation in  that maps
that maps  onto the element
onto the element  in the orbit
in the orbit  for which
for which  is the minimal element in the set
is the minimal element in the set  .
.
By Theorem 7.7, the orbit  can be computed in polynomial time. Since
can be computed in polynomial time. Since  contains at most
contains at most  elements,
elements,  can be determined efficiently. Our algorithm ensures that
can be determined efficiently. Our algorithm ensures that  . Since every permutation in
. Since every permutation in  maps each element of
maps each element of  onto itself, and since
onto itself, and since  , it follows that for each
, it follows that for each  with
with  , for each
, for each  , and for each
, and for each  ,
,

In particular, it follows for the lexicographically smallest permutation  in
in  that every permutation from
that every permutation from  must coincide with
must coincide with  on the first
on the first  elements, i.e. on
elements, i.e. on  .
.
Moreover, for each  and for the element
and for the element  defined above, we have
defined above, we have

Clearly,  . The claim now follows from the fact that
. The claim now follows from the fact that  for the lexicographically smallest permutation
for the lexicographically smallest permutation  of
of  .
.
Thus, LERC is a correct algorithm. It easy to see that it is also efficient.
Theorem 8.19 can easily be extended to Corollary 8.20, see Exercise 8-3.
Corollary 8.20 Let  be a permutation group with
be a permutation group with  , and let
, and let  and
and  be two given permutations in
be two given permutations in  . There exists a polynomial-time algorithm that, given
. There exists a polynomial-time algorithm that, given  , computes the lexicographically smallest permutation of
, computes the lexicographically smallest permutation of  .
.
We now prove Theorem 8.21, the main result of this section.
Theorem 8.21 (Arvind and Kurur)  is in
is in  .
.
Proof. Define the (functional) problem  as follows: Given a graph
as follows: Given a graph  , compute a strong generator of the automorphism group
, compute a strong generator of the automorphism group  ; see Definition 7.6 and the subsequent paragraph and Definition 7.8 for these notions. By Mathon's [176] result, the problems
; see Definition 7.6 and the subsequent paragraph and Definition 7.8 for these notions. By Mathon's [176] result, the problems  and
and  are Turing-equivalent (see also [151]), i.e.,
are Turing-equivalent (see also [151]), i.e.,  is in
is in  and
and  is in
is in  . Thus, it is enough to show that
. Thus, it is enough to show that  is in
is in  because the self-lowness of
because the self-lowness of  stated in Theorem 8.18 implies that
stated in Theorem 8.18 implies that  is in
is in  , which will complete the proof. So, our goal is to find an
, which will complete the proof. So, our goal is to find an  algorithm for
algorithm for  . Given a graph
. Given a graph  , this algorithm has to compute a strong generator
, this algorithm has to compute a strong generator  for
for  , where
, where

is the tower of stabilisers of  and
and  ,
,  , is a complete right transversal of
, is a complete right transversal of  in
in  .
.
Starting with the trivial case,  , we build step by step a strong generator for
, we build step by step a strong generator for  , where
, where  is decreasing. Eventually, we will thus obtain a strong generator for
is decreasing. Eventually, we will thus obtain a strong generator for  . So suppose a strong generator
. So suppose a strong generator  for
for  has already been found. We now describe how to determine a complete right transversal
has already been found. We now describe how to determine a complete right transversal  of
of  in
in  by our
by our  algorithm. Define the oracle set
algorithm. Define the oracle set

By Theorem 8.19, the lexicographically smallest permutation LERC  of the right coset
of the right coset  can be determined in polynomial time by our algorithm. The partial permutation
can be determined in polynomial time by our algorithm. The partial permutation  belongs to the input
belongs to the input  , since we wish to use
, since we wish to use  as an oracle in order to find the lexicographically smallest permutation by prefix search; cf. Example 8.3.
as an oracle in order to find the lexicographically smallest permutation by prefix search; cf. Example 8.3.
Consider the following NPTM  for
for  :
:
N(
)
1 verify that2 nondeterministically guess a permutation
;

has
vertices 3
IFand
and
extends
and
LERC4
THENaccept and halt 5ELSEreject and halt

Thus,  is in NP. Note that if
is in NP. Note that if  then
then  , for each permutation
, for each permutation  in the right coset
in the right coset  .
.
We now show that if  then the number of accepting computation paths of
then the number of accepting computation paths of  on input
on input  is either
is either  or
or  . In general,
. In general,  .
.
Suppose  is in
is in  and
and  . If
. If  for some
for some  and
and  , then the right coset
, then the right coset  contains exactly those permutations in
contains exactly those permutations in  that map
that map  to
to  . Thus, the only accepting computation path of
. Thus, the only accepting computation path of  corresponds to the unique lexicographically smallest permutation
corresponds to the unique lexicographically smallest permutation 
LERC  . If, on the other hand,
. If, on the other hand,  is a strict subgroup of
is a strict subgroup of  , then
, then  can be written as the disjoint union of
can be written as the disjoint union of  right cosets of
right cosets of  . In general,
. In general,  thus possesses
thus possesses  accepting computation paths if
accepting computation paths if  is in
is in  , and otherwise it has no accepting computation path.
, and otherwise it has no accepting computation path.
M-A(
)
1 setfor each
,
;

has
vertices 2

will be a complete right transversal of
in
. 3 set
for each
,
4 set


will be a strong generator for
. 5
FOR
DOWNTO1
is already found at the start
of the
th iteration, and
will now be computed. 6
DOletbe the partial permutation with
for each
7
For
,
is the nowhere defined partial permutation. 8
FOR
TO9
DO, i.e.,
extends
by the pair
with
10
IF11
THENConstruct the smallest permutation in
mapping
to
by prefix search. 12
FOR
TO13
DOfind the elementnot in the image of
with
14
15
Now,
is a total permutation in
16
now,
is a complete right transversal of
in
17
. 18
RETURN

is a strong generator for

The above algorithm is an  algorithm
algorithm  for
for  . The DPOTM
. The DPOTM  makes only queries
makes only queries  to its oracle
to its oracle  for which
for which  . Thus,
. Thus,  for each query
for each query  actually asked. By item 4 of Theorem 8.18, it follows that
actually asked. By item 4 of Theorem 8.18, it follows that  is in
is in  .
.
The claim that the output  of
of  indeed is a strong generator for
indeed is a strong generator for  can be shown by induction on
can be shown by induction on  . The induction base is
. The induction base is  , and
, and  of course generates
of course generates  .
.
For the induction step, assume that prior to the  th iteration a strong generator
th iteration a strong generator  for
for  has already been found. We now show that after the
has already been found. We now show that after the  th iteration the set
th iteration the set  is a strong generator for
is a strong generator for  . For each
. For each  with
with  , the oracle query “
, the oracle query “  ?” checks whether there is a permutation in
?” checks whether there is a permutation in  mapping
mapping  to
to  . By prefix search, which is performed by making suitable oracle queries to
. By prefix search, which is performed by making suitable oracle queries to  again, the lexicographically smallest permutation
again, the lexicographically smallest permutation  in
in  with
with  is constructed. Note that, as claimed above, only queries
is constructed. Note that, as claimed above, only queries  satisfying
satisfying  are made to
are made to  , since
, since  is a strong generator for
is a strong generator for  , so
, so  . By construction, after the
. By construction, after the  th iteration,
th iteration,  is a complete right transversal of
is a complete right transversal of  in
in  . It follows that
. It follows that  is a strong generator for
is a strong generator for  . Eventually, after
. Eventually, after  iterations, a strong generator
iterations, a strong generator  for
for  is found.
is found.
From Theorem 8.21 and the first two items of Theorem 8.18, we obtain Corollary 8.22.
Corollary 8.22  is low for both
is low for both  and
and  , i.e.,
, i.e.,  and
and  .
.
Exercises
8.4-1 By Definition 8.9,  if and only if
if and only if  . Show that
. Show that  if and only if
if and only if  .
.
8.4-2 Show that the set  defined in Example 8.3 is in NP. Moreover, prove that the machine
defined in Example 8.3 is in NP. Moreover, prove that the machine  defined in Example 8.3 runs in polynomial time, i.e., show that
defined in Example 8.3 runs in polynomial time, i.e., show that  is a DPOTM.
is a DPOTM.
PROBLEMS |
A strong NPOTM is an NPOTM with three types of final states, i.e., the set  of final states of
of final states of  is partitioned into
is partitioned into  (accepting states),
(accepting states),  (rejecting states), and
(rejecting states), and  (“don't know” states) such that the following holds: If
(“don't know” states) such that the following holds: If  then
then  has at least one computation path halting in an accepting state from
has at least one computation path halting in an accepting state from  but no computation path halting in a rejecting state from
but no computation path halting in a rejecting state from  . If
. If  then
then  has at least one computation path halting in a rejecting state from
has at least one computation path halting in a rejecting state from  but no computation path halting in an accepting state from
but no computation path halting in an accepting state from  . In both cases
. In both cases  may have computation paths halting in “don't know” states from
may have computation paths halting in “don't know” states from  . In other words, strong NPOTMs are machines that never lie. Prove the following two assertions:
. In other words, strong NPOTMs are machines that never lie. Prove the following two assertions:
(a)  if and only if there exists a strong NPOTM
if and only if there exists a strong NPOTM  with
with  .
.
(b)  if and only if
if and only if  .
.
Hint. Look at Exercise 8.4-1.
Prove the assertions from Theorems 8.11 and 8.13. (Some are far from being trivial!)
8-3 Modification of the proofs Modify the proof of Theorem 8.19 so as to obtain Corollary 8.20.
CHAPTER NOTES |
Parts of the Chapters 7 and 8 are based on the book [219] that provides the proofs omitted here, such as those of Theorems 8.11, 8.13, and 8.18 and of Lemma 8.15, and many more details.
More background on complexity theory can be found in the books [112], [198], [266], [271]. A valuable source on the theory of NP-completeness is still the classic [81] by Garey and Johnson. The  -reducibility was introduced by Cook [51], and the
-reducibility was introduced by Cook [51], and the  -reducibility by Karp [140]. A deep and profound study of polynomial-time reducibilities is due to Ladner, Lynch, and Selman [157].
-reducibility by Karp [140]. A deep and profound study of polynomial-time reducibilities is due to Ladner, Lynch, and Selman [157].
Exercise 8-1 and Problem 8-1 are due to Selman [231].
Dantsin et al. [59] obtained an upper bound of  for the deterministic time complexity of
for the deterministic time complexity of  , which was further improved by Brueggemann and Kern [34] to
, which was further improved by Brueggemann and Kern [34] to  . The randomised algorithm presented in Subsection 8.3.2 is due to Schöning [228]; it is based on a “limited local search with restart”. For
. The randomised algorithm presented in Subsection 8.3.2 is due to Schöning [228]; it is based on a “limited local search with restart”. For  with
with  , the algorithm by Paturi et al. [200] is slightly better than Schöning's algorithm. Iwama and Tamaki [131] combined the ideas of Schöning [228] and Paturi et al.[200] to obtain a bound of
, the algorithm by Paturi et al. [200] is slightly better than Schöning's algorithm. Iwama and Tamaki [131] combined the ideas of Schöning [228] and Paturi et al.[200] to obtain a bound of  for
for  with
with  . For
. For  with
with  , their algorithm is not better than that by Paturi et al. [200].
, their algorithm is not better than that by Paturi et al. [200].
Figure 8.7 gives an overview over some algorithms for the satisfiability problem.
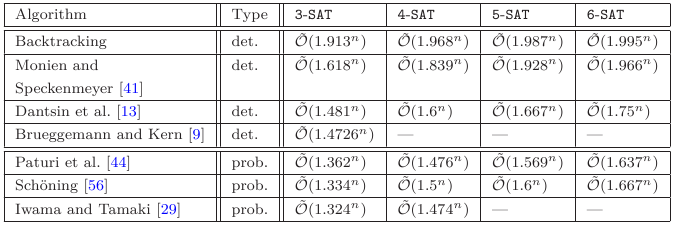
For
a thorough, comprehensive treatment of the graph isomorphism problem
the reader is referred to the book by Köbler, Schöning, and Torán [152], particularly under complexity-theoretic aspects. Hoffman [115] investigates group-theoretic algorithms for the graph isomorphism problem and related problems.
The polynomial hierarchy was introduced by Meyer and Stockmeyer [178], [250]. In particular, Theorem 8.11 is due to them. Schöning [226] introduced the low hierarchy and the high hierarchy within NP. The results stated in Theorem 8.13 are due to him [226]. He also proved that  is in
is in  , see [227]. Köbler et al. [150], [151] obtained the first lowness results of
, see [227]. Köbler et al. [150], [151] obtained the first lowness results of  for probabilistic classes such as
for probabilistic classes such as  . These results were improved by Arvind and Kurur [12] who proved that
. These results were improved by Arvind and Kurur [12] who proved that  is even in
is even in  . The class
. The class  generalises Valiant's class
generalises Valiant's class  , see [261]. So-called “promise classes” such as
, see [261]. So-called “promise classes” such as  and
and  have been thoroughly studied in a number of papers; see, e.g., [12], [30], [71], [150], [151], [210], [218]. Lemma 8.15 is due to Carter and Wegman [41].
have been thoroughly studied in a number of papers; see, e.g., [12], [30], [71], [150], [151], [210], [218]. Lemma 8.15 is due to Carter and Wegman [41].
The author is grateful to Uwe Schöning for his helpful comments on
an earlier version of this chapter and for sending the slides of one of
this talks that helped simplifying the probability analysis for the
algorithm Random-SAT sketched in Subsection 8.3; a more comprehensive analysis can be found in Schöning's book [229].
Thanks are also due to Dietrich Stoyan, Robert Stoyan, Sigurd Assing,
Gábor Erdélyi and Holger Spakowski for proofreading previous versions
of Chapters 7 and 8.
This work was supported in part by the Deutsche Forschungsgemeinschaft
(DFG) under grants RO 1202/9-1 and RO 1202/9-3 and by the Alexander von
Humboldt Foundation in the TransCoop program.
Table of Contents
- 9. Competitive Analysis
- 10. Game Theory
- 10.1 Finite games
- 10.2 Continuous games
- 10.2.1 Fixed-point methods based on best responses
- 10.2.2 Applying Fan's inequality
- 10.2.3 Solving the Kuhn-Tucker conditions
- 10.2.4 Reduction to optimization problems
- 10.2.5 Method of fictitious play
- 10.2.6 Symmetric matrix games
- 10.2.7 Linear programming and matrix games
- 10.2.8 The method of von Neumann
- 10.2.9 Diagonally strictly concave games
- 10.3 The oligopoly problem
- 11. Recurrences
- 12. Scientific Computing
Table of Contents
In on-line computation an algorithm must make its decisions based only on past events without secure information on future. Such methods are called on-line algorithms. On-line algorithms have many applications in different areas such as computer science, economics and operations research.
The first results in this area appeared around 1970, and later since 1990 more and more researchers have started to work on problems related to on-line algorithms. Many subfields have been developed and investigated. Nowadays new results of the area have been presented on the most important conferences about algorithms. This chapter does not give a detailed overview about the results, because it is not possible in this framework. The goal of the chapter is to show some of the main methods of analysing and developing on-line algorithms by presenting some subareas in more details.
In the next section we define the basic notions used in the analysis
of on-line algorithms. After giving the most important definitions we
present one of the best-known on-line problems—the on-line  -server
problem—and some of the related results. Then we deal with a new area
by presenting on-line problems belonging to computer networks. In the
next section the on-line bin packing problem and its multidimensional
generalisations are presented. Finally in the last section of this
chapter we show some basic results concerning the area of on-line
scheduling.
-server
problem—and some of the related results. Then we deal with a new area
by presenting on-line problems belonging to computer networks. In the
next section the on-line bin packing problem and its multidimensional
generalisations are presented. Finally in the last section of this
chapter we show some basic results concerning the area of on-line
scheduling.
Since an on-line algorithm makes its decisions based on partial information without knowing the whole instance in advance, we cannot expect it to give the optimal solution which can be given by an algorithm having full information. An algorithm which knows the whole input in advance is called off-line algorithm.
There are two main methods to measure the performance of on-line algorithms. One possibility is to use average case analysis where we hypothesise some distribution on events and we study the expected total cost.
The disadvantage of this approach is that usually we do not have any information about the distribution of the possible inputs. In this chapter we do not use the average case analysis.
An another approach is a worst case analysis, which is called competitive analysis. In this case we compare the objective function value of the solution produced by the on-line algorithm to the optimal off-line objective function value.
In case of on-line minimisation problems an on-line algorithm is called  -competitive, if the cost of the solution produced by the on-line algorithm is at most
-competitive, if the cost of the solution produced by the on-line algorithm is at most  times more than the optimal off-line cost for each input. The competitive ratio of an algorithm is the smallest
times more than the optimal off-line cost for each input. The competitive ratio of an algorithm is the smallest  for which the algorithm is
for which the algorithm is  -competitive.
-competitive.
For an arbitrary on-line algorithm ALG we denote the objective function value achieved on input  by
by  . The optimal off-line objective function value on
. The optimal off-line objective function value on  is denoted by
is denoted by  . Using this notation we can define the competitiveness as follows.
. Using this notation we can define the competitiveness as follows.
Algorithm ALG is  -competitive, if
-competitive, if  is valid for each input
is valid for each input  .
.
There are two further versions of the competitiveness which are often used. For a minimisation problem an algorithm ALG is called weakly  -competitive, if there exists such a constant
-competitive, if there exists such a constant  that
that  is valid for each input
is valid for each input  .
.
The weak competitive ratio of an algorithm is the smallest  for which the algorithm is weakly
for which the algorithm is weakly  -competitive.
-competitive.
A further version of the competitive ratio is the asymptotic competitive ratio. For minimisation problems the asymptotic competitive ratio of algorithm  can be defined as follows:
can be defined as follows:


An algorithm is called asymptotically  -competitive if its asymptotic competitive ratio is at most
-competitive if its asymptotic competitive ratio is at most  .
.
The main property of the asymptotic ratio is that it considers the
performance of the algorithm under the assumption that the size of the
input tends to  . This means that this ratio is not effected by the behaviour of the algorithm on the small size inputs.
. This means that this ratio is not effected by the behaviour of the algorithm on the small size inputs.
Similar definitions can be given for maximisation problems. In that case algorithm ALG is called  -competitive, if
-competitive, if  is valid for each input
is valid for each input  , and the algorithm is weakly
, and the algorithm is weakly  -competitive if there exists such a constant
-competitive if there exists such a constant  that
that  is valid for each input
is valid for each input  . The asymptotic ratio for maximisation problems can be given as follows:
. The asymptotic ratio for maximisation problems can be given as follows:


The algorithm is called asymptotically  -competitive if its asymptotic ratio is at least
-competitive if its asymptotic ratio is at least  .
.
Many papers are devoted randomised on-line algorithms, in which case the objective function value achieved by the algorithm is a random variable, and the expected value of this variable is used in the definition of the competitive ratio. Since we consider only deterministic on-line algorithms in this chapter, we do not detail the notions related to randomised on-line algorithms.
One of the best-known on-line problems is the on-line  -server problem. To give the definition of the general problem the notion of metric spaces is needed. A pair
-server problem. To give the definition of the general problem the notion of metric spaces is needed. A pair  (where
(where  contains the points of the space and
contains the points of the space and  is the distance function defined on the set
is the distance function defined on the set  ) is called metric space if the following properties are valid:
) is called metric space if the following properties are valid:
-
 for all
for all  ,
, -
 for all
for all  ,
, -
 for all
for all  ,
, -
 holds if and only if
holds if and only if  .
.
In the  -server problem a metric space is given, and there are
-server problem a metric space is given, and there are  servers which can move in the space. The decision maker has to satisfy
a list of requests appearing at the points of the metric space by
sending a server to the point where the request appears.
servers which can move in the space. The decision maker has to satisfy
a list of requests appearing at the points of the metric space by
sending a server to the point where the request appears.
The problem is on-line which means that the requests arrive one by one, and we must satisfy each request without any information about the further requests. The goal is to minimise the total distance travelled by the servers. In the remaining parts of the section the multiset which contains the points where the servers are is called the configuration of the servers. We use multisets, since different servers can be at the same points of the space.
The first important results for the  -server problem were achieved by Manasse, McGeoch and Sleator. They developed the following algorithm called
-server problem were achieved by Manasse, McGeoch and Sleator. They developed the following algorithm called Balance, which we denote by BAL.
During the procedure the servers are in different points. The algorithm
stores for each server the total distance travelled by the server. The
servers and the points in the space where the servers are located are
denoted by  . Let the total distance travelled by the server
. Let the total distance travelled by the server  be
be  . After the arrival of a request at point
. After the arrival of a request at point  algorithm
algorithm BAL uses server  for which the value
for which the value  is minimal. This means that the algorithm tries to balance the
distances travelled by the servers. Therefore the algorithm maintains
server configuration
is minimal. This means that the algorithm tries to balance the
distances travelled by the servers. Therefore the algorithm maintains
server configuration  and the distances travelled by the servers which distances have starting values
and the distances travelled by the servers which distances have starting values  . The behaviour of the algorithm on input
. The behaviour of the algorithm on input  can be given by the following pseudocode:
can be given by the following pseudocode:
BAL(
)
1FOR
TO2
DO3 serve the request with server
4
5

Example 9.1 Consider the two dimensional Euclidean space as the metric space. The points are two dimensional real vectors  , and the distance between
, and the distance between  and
and  is
is  . Suppose that there are two servers which are located at points
. Suppose that there are two servers which are located at points  and
and  at the beginning. Therefore at the beginning
at the beginning. Therefore at the beginning  ,
,  ,
,  . Suppose that the first request appears at point
. Suppose that the first request appears at point  . Then
. Then  , thus the second server is used to satisfy the request and after the action of the server
, thus the second server is used to satisfy the request and after the action of the server  ,
,  ,
,  . Suppose that the second request appears at point
. Suppose that the second request appears at point  , so
, so  , thus again the second server is used, and after serving the request
, thus again the second server is used, and after serving the request  ,
,  ,
,  . Suppose that the third request appears at point
. Suppose that the third request appears at point  , so
, so  , thus the first server is used, and after serving the request
, thus the first server is used, and after serving the request  ,
,  ,
,  .
.
The algorithm is efficient in the cases of some particular metric spaces as it is shown by the following statement. The references where the proof of the following theorem can be found are in the chapter notes at the end of the chapter.
Theorem 9.1 Algorithm Balance is weakly  -competitive for the metric spaces containing
-competitive for the metric spaces containing  points.
points.
The following statement shows that there is no on-line algorithm which is better than  -competitive for the general
-competitive for the general  -server problem.
-server problem.
Theorem 9.2 There is no metric space containing at least  points where an on-line algorithm exists with smaller competitive ratio than
points where an on-line algorithm exists with smaller competitive ratio than  .
.
Proof. Consider an arbitrary metric space containing at least  points and an arbitrary on-line algorithm say
points and an arbitrary on-line algorithm say ONL. Denote the points of the starting configuration of ONL by  , and let
, and let  be another point of the metric space. Consider the following long list of requests
be another point of the metric space. Consider the following long list of requests  . The next request appears at the point among
. The next request appears at the point among  where
where ONL has no server.
First calculate the value  . The algorithm does not have any servers at point
. The algorithm does not have any servers at point  after serving
after serving  , thus the request appeared at
, thus the request appeared at  is served by the server located at point
is served by the server located at point  . Therefore the cost of serving
. Therefore the cost of serving  is
is  , which yields
, which yields
where  denotes the point from which the server was sent to serve
denotes the point from which the server was sent to serve  . (This is the point where the
. (This is the point where the  -th request would appear.) Now consider the cost
-th request would appear.) Now consider the cost  . Instead of calculating the optimal off-line cost we define
. Instead of calculating the optimal off-line cost we define  different off-line algorithms, and we use the mean of the costs
resulting from these algorithms. Since the cost of each off-line
algorithm is at least as much as the optimal off-line cost, the
calculated mean is an upper bound for the optimal off-line cost.
different off-line algorithms, and we use the mean of the costs
resulting from these algorithms. Since the cost of each off-line
algorithm is at least as much as the optimal off-line cost, the
calculated mean is an upper bound for the optimal off-line cost.
We define the following  off-line algorithms, denoted by
off-line algorithms, denoted by  . Suppose that the servers are at points
. Suppose that the servers are at points  in the starting configuration of
in the starting configuration of  . We can move the servers into this starting configuration using an extra constant cost
. We can move the servers into this starting configuration using an extra constant cost  .
.
The algorithms satisfy the requests as follows. If an algorithm  has a server at point
has a server at point  , then none of the servers moves. Otherwise the request is served by the server located at point
, then none of the servers moves. Otherwise the request is served by the server located at point  . The algorithms are well-defined, if
. The algorithms are well-defined, if  does not contain a server, then each of the other points
does not contain a server, then each of the other points  contains a server, thus there is a server located at
contains a server, thus there is a server located at  . Moreover
. Moreover  , thus at the beginning each algorithm has a server at the requested point.
, thus at the beginning each algorithm has a server at the requested point.
We show that the servers of algorithms  are always in different configurations. At the beginning this property
is valid because of the definition of the algorithms. Now consider the
step where a request is served. Call the algorithms which do not move a
server for serving the request stable, and the other algorithms
unstable. The server configurations of the stable algorithms remain
unchanged, so these configurations remain different from each other.
Each unstable algorithm moves a server from point
are always in different configurations. At the beginning this property
is valid because of the definition of the algorithms. Now consider the
step where a request is served. Call the algorithms which do not move a
server for serving the request stable, and the other algorithms
unstable. The server configurations of the stable algorithms remain
unchanged, so these configurations remain different from each other.
Each unstable algorithm moves a server from point  .
This point is the place of the last request, thus the stable algorithms
have server at it. Therefore, an unstable algorithm and a stable
algorithm cannot have the same configuration after serving the request.
Furthermore, each unstable algorithms moves a server from
.
This point is the place of the last request, thus the stable algorithms
have server at it. Therefore, an unstable algorithm and a stable
algorithm cannot have the same configuration after serving the request.
Furthermore, each unstable algorithms moves a server from  to
to  , thus the server configurations of the unstable algorithms remain different from each other.
, thus the server configurations of the unstable algorithms remain different from each other.
So at the arrival of the request at point  the servers of the algorithms are in different configurations. On the other hand, each configuration has a server at point
the servers of the algorithms are in different configurations. On the other hand, each configuration has a server at point  , therefore there is only one configuration where there is no server located at point
, therefore there is only one configuration where there is no server located at point  . Consequently, the cost of serving
. Consequently, the cost of serving  is
is  for one of the algorithms and
for one of the algorithms and  for the other algorithms.
for the other algorithms.
Therefore

where  is an absolute constant which is independent of the input (this is the
cost of moving the servers to the starting configuration of the defined
algorithms).
is an absolute constant which is independent of the input (this is the
cost of moving the servers to the starting configuration of the defined
algorithms).
On the other hand, the optimal off-line cost cannot be larger than the cost of any of the above defined algorithms, thus  . This yields
. This yields

which inequality shows that the weak competitive ratio of ONL cannot be smaller than  , since the value
, since the value  can be arbitrarily large as the length of the input is increasing.
can be arbitrarily large as the length of the input is increasing.
There are many interesting results in connection with this
problem.have appeared during the next few years. For the general case
the first constant-competitive algorithm ( -competitive)
was developed by Fiat, Rabani and Ravid. Later Koutsoupias and
Papadimitriou could analyse an algorithm based on the work function
technique and they could prove that it is
-competitive)
was developed by Fiat, Rabani and Ravid. Later Koutsoupias and
Papadimitriou could analyse an algorithm based on the work function
technique and they could prove that it is  -competitive.
They could not determine the competitive ratio of the algorithm, but it
is a widely believed hypothesis that the algorithm is
-competitive.
They could not determine the competitive ratio of the algorithm, but it
is a widely believed hypothesis that the algorithm is  -competitive. Determining the competitive ratio of the algorithm, or developing a
-competitive. Determining the competitive ratio of the algorithm, or developing a  -competitive
algorithm is still among the most important open problems in the area
of on-line algorithms. We present the work function algorithm below.
-competitive
algorithm is still among the most important open problems in the area
of on-line algorithms. We present the work function algorithm below.
Denote the starting configuration of the on-line servers by  . Then after the
. Then after the  -th request the work function value belonging to multiset
-th request the work function value belonging to multiset  is the minimal cost needed to serve the first
is the minimal cost needed to serve the first  requests starting at configuration
requests starting at configuration  and ending at configuration
and ending at configuration  . This value is denoted by
. This value is denoted by  . The
. The Work-Function algorithm is based on the above defined work function. Suppose that  is the server configuration before the arrival of the
is the server configuration before the arrival of the  -th request, and denote the place of the
-th request, and denote the place of the  -th request by
-th request by  . The
. The Work-Function algorithm uses server  to serve the request for which the value
to serve the request for which the value  is minimal, where
is minimal, where  denotes the point where the server is actually located.
denotes the point where the server is actually located.
Example 9.2 Consider the metric space containing three points  ,
,  and
and  with the distances
with the distances  ,
,  ,
,  . Suppose that we have two servers and the starting configuration is
. Suppose that we have two servers and the starting configuration is  . In this case the starting work function values are
. In this case the starting work function values are  ,
,  ,
,  ,
,  ,
,  ,
,  . Suppose that the first request appears at point
. Suppose that the first request appears at point  . Then
. Then  and
and  , thus algorithm
, thus algorithm Work Function uses the server from point  to serve the request.
to serve the request.
The following statement is valid for the algorithm.
Theorem 9.3 The Work-Function algorithm is weakly  -competitive.
-competitive.
Besides the general problem many particular cases have been investigated. If the distance of any pair of points is  ,
then we obtain the on-line paging problem as a special case. Another
well investigated metric space is the line. The points of the line are
considered as real numbers, and the distance of points
,
then we obtain the on-line paging problem as a special case. Another
well investigated metric space is the line. The points of the line are
considered as real numbers, and the distance of points  and
and  is
is  . In this special case a
. In this special case a  -competitive algorithm was developed by Chrobak and Larmore, which algorithm is called
-competitive algorithm was developed by Chrobak and Larmore, which algorithm is called Double-Coverage. A request at point  is served by server
is served by server  which is the closest to
which is the closest to  . Moreover, if there are servers also on the opposite side of
. Moreover, if there are servers also on the opposite side of  , then the closest server among them moves distance
, then the closest server among them moves distance  into the direction of
into the direction of  . Hereafter we denote the
. Hereafter we denote the Double-Coverage algorithm by DC. The input of the algorithm is the list of requests which is a list of points (real numbers) denoted by  and the starting configuration of the servers is denoted by
and the starting configuration of the servers is denoted by  which contains points (real numbers) too. The algorithm can be defined by the following pseudocode:
which contains points (real numbers) too. The algorithm can be defined by the following pseudocode:
DC(
)
1FOR
TO2
DO3
IFor
4
THEN</tab/>the request is served by the
-th server 5
6
ELSEIF7
THEN8
the request is served by the
-th server 9
10
11
ELSEIF12
THEN13
the request is served by the
-th server 14
15

Example 9.3 Suppose that there are three servers  located at points
located at points  . If the next request appears at point
. If the next request appears at point  , then
, then DC uses the closest server  to serve the request. The locations of the other servers remain unchanged, the cost of serving the request is
to serve the request. The locations of the other servers remain unchanged, the cost of serving the request is  and the servers are at points
and the servers are at points  . If the next request appears at point
. If the next request appears at point  , then
, then DC uses the closest server  to serve the request, but there are servers on the opposite side of the request, thus
to serve the request, but there are servers on the opposite side of the request, thus  also travels distance
also travels distance  into the direction of
into the direction of  . Therefore the cost of serving the request is
. Therefore the cost of serving the request is  and the servers will be at points
and the servers will be at points  .
.
The following statement, which can be proved by the potential function technique, is valid for algorithm DC. This technique is often used in the analysis of on-line algorithms.
Theorem 9.4 Algorithm DC is weakly  -competitive on the line.
-competitive on the line.
Proof. Consider an arbitrary sequence of requests and denote this input by  . During the analysis of the procedure we suppose that one off-line optimal algorithm and
. During the analysis of the procedure we suppose that one off-line optimal algorithm and DC
are running parallel on the input. We also suppose that each request is
served first by the off-line algorithm and then by the on-line
algorithm. The servers of the on-line algorithm and also the positions
of the servers (which are real numbers) are denoted by  , and the servers of the optimal off-line algorithm and also the positions of the servers are denoted by
, and the servers of the optimal off-line algorithm and also the positions of the servers are denoted by  . We suppose that for the positions
. We suppose that for the positions  and
and  are always valid, this can be achieved by swapping the notations of the servers.
are always valid, this can be achieved by swapping the notations of the servers.
We prove the theorem by the potential function technique. The potential function assigns a value to the actual positions of the servers, so the on-line and off-line costs are compared using the changes of the potential function. Let us define the following potential function:
The following statements are valid for the potential function.
 While
While OPT is serving a request the increase of the potential function is not more than  times the distance travelled by the servers of
times the distance travelled by the servers of OPT.
 While
While DC is serving a request, the decrease of  is at least as much as the cost of serving the request.
is at least as much as the cost of serving the request.
If the above properties are valid, then one can prove the theorem easily. In this case  , where
, where  and
and  are the final and the starting values of the potential function. Furthermore,
are the final and the starting values of the potential function. Furthermore,  is nonnegative, so we obtain that
is nonnegative, so we obtain that  , which yields that the algorithms is weakly
, which yields that the algorithms is weakly  -competitive (
-competitive ( does not depend on the input sequence only on the starting position of the servers).
does not depend on the input sequence only on the starting position of the servers).
Now we prove the properties of the potential function.
First consider the case when one of the off-line servers travels distance  . The first part of the potential function increases at most by
. The first part of the potential function increases at most by  . The second part does not change, thus we proved the first property of the potential function.
. The second part does not change, thus we proved the first property of the potential function.
Consider the servers of DC. Suppose that the request appears at point  . Since the request is first served by
. Since the request is first served by OPT,  for some
for some  . The following two cases are distinguished depending on the positions of the on-line servers.
. The following two cases are distinguished depending on the positions of the on-line servers.
First suppose that the on-line servers are on the same side of  . We can assume that the positions of the servers are not smaller than
. We can assume that the positions of the servers are not smaller than  , since the other case is completely similar. In this case
, since the other case is completely similar. In this case  is the closest server and
is the closest server and DC sends  to
to  and the other on-line servers do not move. Therefore the cost of
and the other on-line servers do not move. Therefore the cost of DC is  . In the first sum of the potential function only
. In the first sum of the potential function only  changes; it decreases by
changes; it decreases by  , thus the first part decreases by
, thus the first part decreases by  . The second sum is increasing; the increase is
. The second sum is increasing; the increase is  , thus the value of
, thus the value of  decreases by
decreases by  .
.
Assume that there are servers on both sides of  ; suppose that the closest servers are
; suppose that the closest servers are  and
and  . We assume that
. We assume that  is closer to
is closer to  , the other case is completely similar. In this case the cost of
, the other case is completely similar. In this case the cost of DC is  . Consider the first sum of the potential function. The
. Consider the first sum of the potential function. The  -th and the
-th and the  -th part are changing. Since
-th part are changing. Since  for some
for some  , thus one of the
, thus one of the  -th and the
-th and the  -th parts decreases by
-th parts decreases by  and the increase of the other one is at most
and the increase of the other one is at most  , thus the first sum does not increase. The change of the second sum of
, thus the first sum does not increase. The change of the second sum of  is
is

Thus we proved that the second property of the potential function is also valid in this case.
Exercises
9.2-1 Suppose that  is a metric space. Prove that
is a metric space. Prove that  is also a metric space where
is also a metric space where  .
.
9.2-2 Consider the greedy algorithm which serves each request by the server which is closest to the place of the request. Prove that the algorithm is not constant competitive for the line.
9.2-3 Prove that for arbitrary  -element multisets
-element multisets  and
and  and for arbitrary
and for arbitrary  the inequality
the inequality  is valid, where
is valid, where  is the cost of the minimal matching of
is the cost of the minimal matching of  and
and  , (the minimal cost needed to move the servers from configuration
, (the minimal cost needed to move the servers from configuration  to configuration
to configuration  ).
).
9.2-4 Consider the line as a metric space. Suppose that the servers of the on-line algorithm are at points  , and the servers of the off-line algorithm are at points
, and the servers of the off-line algorithm are at points  . Calculate the value of the potential function used in the proof of Theorem 9.4. How does this potential function change, if the on-line server moves from point
. Calculate the value of the potential function used in the proof of Theorem 9.4. How does this potential function change, if the on-line server moves from point  to point
to point  ?
?
The theory of computer networks has become one of the most significant areas of computer science. In the planning of computer networks many optimisation problems arise and most of these problems are actually on-line, since neither the traffic nor the changes in the topology of a computer network cannot be precisely predicted. Recently some researchers working at the area of on-line algorithms have defined some on-line mathematical models for problems related to computer networks. In this section we consider this area; we present three problems and show the basic results. First the data acknowledgement problem is considered, then we present the web caching problem, and the section is closed by the on-line routing problem.
In the communication of a computer network the information is sent by packets. If the communication channel is not completely safe, then the arrival of the packets are acknowledged. The data acknowledgement problem is to determine the time of sending acknowledgements. An acknowledgement can acknowledge many packets but waiting for long time can cause the resending of the packets and that results in the congestion of the network. On the other hand, sending an acknowledgement about the arrival of each packet immediately would cause again the congestion of the network. The first optimisation model for determining the sending times of the acknowledgements was developed by Dooly, Goldman and Scott in 1998. We present the developed model and some of the basic results.
In the mathematical model of the data acknowledgement problem the input is the list of the arrival times  of the packets. The decision maker has to determine when to send acknowledgements; these times are denoted by
of the packets. The decision maker has to determine when to send acknowledgements; these times are denoted by  . In the optimisation model the cost function is:
. In the optimisation model the cost function is:

where  is the number of the sent acknowledgements and
is the number of the sent acknowledgements and  is the total latency collected by the
is the total latency collected by the  -th acknowledgement. We consider the on-line problem which means that at time
-th acknowledgement. We consider the on-line problem which means that at time  the decision maker only knows the arrival times of the packets already
arrived and has no information about the further packets. We denote the
set of the unacknowledged packets at the arrival time
the decision maker only knows the arrival times of the packets already
arrived and has no information about the further packets. We denote the
set of the unacknowledged packets at the arrival time  by
by  .
.
For the solution of the problem the class of the alarming algorithms has been developed. An alarming algorithm works as follows. At the arrival time  an alarm is set for time
an alarm is set for time  . If no packet arrives before time
. If no packet arrives before time  , then an acknowledgement is sent at time
, then an acknowledgement is sent at time  which acknowledges all of the unacknowledged packets. Otherwise at the arrival of the next packet at time
which acknowledges all of the unacknowledged packets. Otherwise at the arrival of the next packet at time  the alarm is reset for time
the alarm is reset for time  . Below we analyse an algorithm from this class in details. This algorithm sets the alarm to collect total latency
. Below we analyse an algorithm from this class in details. This algorithm sets the alarm to collect total latency  by the acknowledgement. The algorithm is called
by the acknowledgement. The algorithm is called Alarm. We obtain the above defined rule from the general definition using the solution of the following equation as value  :
:
Example 9.4 Consider the following example. The first packet arrives at time  (
( ), so
), so Alarm sets an alarm with value  for time
for time  . Suppose that the next arrival time is
. Suppose that the next arrival time is  . This arrival is before the alarm time, thus the first packet has not been acknowledged yet and we reset the alarm with value
. This arrival is before the alarm time, thus the first packet has not been acknowledged yet and we reset the alarm with value  for time
for time  . Suppose that the next arrival time is
. Suppose that the next arrival time is  .
This arrival is before the alarm time, thus the first two packets have
not been acknowledged yet and we reset the alarm with value
.
This arrival is before the alarm time, thus the first two packets have
not been acknowledged yet and we reset the alarm with value  for time
for time  . Suppose that the next arrival time is
. Suppose that the next arrival time is  . No packet arrived before the alarm time
. No packet arrived before the alarm time  , thus at that time the first three packets were acknowledged and the alarm is set for the new packet with value
, thus at that time the first three packets were acknowledged and the alarm is set for the new packet with value  for time
for time  .
.
Theorem 9.5 Algorithm Alarm is 2-competitive.
Proof. Suppose that algorithm Alarm sends  acknowledgements. These acknowledgements divide the time into
acknowledgements. These acknowledgements divide the time into  time intervals. The cost of the algorithm is
time intervals. The cost of the algorithm is  , since
, since  is the cost of the acknowledgements, and the alarm is set to have total latency
is the cost of the acknowledgements, and the alarm is set to have total latency  for each acknowledgement.
for each acknowledgement.
Suppose that the optimal off-line algorithm sends  acknowledgements. If
acknowledgements. If  , then
, then  is obviously valid, thus we obtain that the algorithm is
is obviously valid, thus we obtain that the algorithm is  -competitive. If
-competitive. If  , then at least
, then at least  time intervals among the ones defined by the acknowledgements of algorithm
time intervals among the ones defined by the acknowledgements of algorithm Alarm do not contain any of the off-line acknowledgements. This yields that the off-line total latency is at most  , thus we obtain that
, thus we obtain that  which inequality proves that
which inequality proves that Alarm is  -competitive.
-competitive.
As the following theorem shows, algorithm Alarm has the smallest possible competitive ratio.
Theorem 9.6 There is no on-line algorithm for the data acknowledgement problem which has smaller competitive ratio than  .
.
Proof. Consider an arbitrary on-line algorithm and denote it by ONL.
Analyse the following input. Consider a long sequence of packets where
the packets always arrive immediately after the time when ONL sends an acknowledgement. The on-line cost of a sequence containing  packets is
packets is  , since the cost resulted from the acknowledgements is
, since the cost resulted from the acknowledgements is  , and the latency of the
, and the latency of the  -th acknowledgement is
-th acknowledgement is  , where the value
, where the value  is used.
is used.
Consider the following two on-line algorithms. ODD sends the acknowledgements after the odd numbered packets and EVEN sends the acknowledgements after the even numbered packets.
The costs achieved by these algorithms are
and
Therefore  . On the other hand, none of the costs achieved by
. On the other hand, none of the costs achieved by ODD and EVEN is greater than the optimal off-line cost, thus  , which yields that
, which yields that  . From this inequality it follows that the competitive ratio of
. From this inequality it follows that the competitive ratio of ONL is not smaller than 2, because using a sufficiently long sequence of packets the value  can be arbitrarily large.
can be arbitrarily large.
The file caching problem is a generalisation of the caching problem
presented in the chapter on memory management. World-wide-web browsers
use caches to store some files. This makes it possible to use the
stored files if a user wants to see some web-page many times during a
short time interval. If the cache becomes full, then some files must be
eliminated to make space for the new file. The file caching problem
models this scenario; the goal is to find good strategies for
determining which files should be eliminated. It differs from the
standard paging problem in the fact that the files have size and
retrieval cost (the problem is reduced to the paging if each size and
each retrieval cost are  ). So the following mathematical model describes the problem.
). So the following mathematical model describes the problem.
There is a given cache of size  and the input is a sequence of pages. Each page
and the input is a sequence of pages. Each page  has a size denoted by
has a size denoted by  and a retrieval cost denoted by
and a retrieval cost denoted by  .
The pages arrive from a list one by one and after the arrival of a page
the algorithm has to place it into the cache. If the page is not
contained in the cache and there is not enough space to put it into the
cache, then the algorithm has to delete some pages from the cache to
make enough space for the requested page. If the required page is in
the cache, then the cost of serving the request is
.
The pages arrive from a list one by one and after the arrival of a page
the algorithm has to place it into the cache. If the page is not
contained in the cache and there is not enough space to put it into the
cache, then the algorithm has to delete some pages from the cache to
make enough space for the requested page. If the required page is in
the cache, then the cost of serving the request is  , otherwise the cost is
, otherwise the cost is  .
The aim is to minimise the total cost. The problem is on-line which
means that for the decisions (which pages should be deleted from the
cache) only the earlier pages and decisions can be used, the algorithm
has no information about the further pages. We assume that the size of
the cache and also the sizes of the pages are positive integers.
.
The aim is to minimise the total cost. The problem is on-line which
means that for the decisions (which pages should be deleted from the
cache) only the earlier pages and decisions can be used, the algorithm
has no information about the further pages. We assume that the size of
the cache and also the sizes of the pages are positive integers.
For the solution of the problem and for its special cases many algorithms have been developed. Here we present algorithm Landlord which was developed by Young.
The algorithm stores a credit value  for each page
for each page  which is contained in the current cache. In the rest of the section the set of the pages in the current cache of
which is contained in the current cache. In the rest of the section the set of the pages in the current cache of Landlord is denoted by  . If
. If Landlord has to retrieve a page  then the following steps are performed.
then the following steps are performed.
Landlord(
)
1IFis not contained in
2
THENWHILEthere is not enough space for3
DO4 for each
let
5 evict some pages with
6 place
into cache
and let
7
ELSEresetto any value between
and

Example 9.5 Suppose that  and
and  contains the following three pages:
contains the following three pages:  with
with  ,
,  with
with  and
and  with
with  . Suppose that the next requested page is
. Suppose that the next requested page is  , with parameters
, with parameters  and
and  . Therefore, there is not enough space for it in the cache, so some pages must be evicted.
. Therefore, there is not enough space for it in the cache, so some pages must be evicted. Landlord determines the value  and changes the credits as follows:
and changes the credits as follows:  and
and  , thus
, thus  is evicted from cache
is evicted from cache  . There is still not enough space for
. There is still not enough space for  in the cache. The new
in the cache. The new  value is
value is  and the new credits are:
and the new credits are:  , thus
, thus  is evicted from the cache. Then there is enough space for
is evicted from the cache. Then there is enough space for  , thus it is placed into cache
, thus it is placed into cache  with the credit value
with the credit value  .
.
Landlord is weakly  -competitive, but a stronger statement is also true. For the web caching problem an on-line algorithm
-competitive, but a stronger statement is also true. For the web caching problem an on-line algorithm ALG is called  -competitive, if there exists such a constant
-competitive, if there exists such a constant  , that
, that  is valid for each input, where
is valid for each input, where  is the cost of
is the cost of ALG using a cache of size  and
and  is the optimal off-line cost using a cache of size
is the optimal off-line cost using a cache of size  . The following statement holds for algorithm
. The following statement holds for algorithm Landlord.
Theorem 9.7 If  , then algorithm
, then algorithm Landlord is  -competitive.
-competitive.
Proof. Consider an arbitrary input sequence of pages and denote the input by  .
We use the potential function technique. During the analysis of the
procedure we suppose that an off-line optimal algorithm with cache size
.
We use the potential function technique. During the analysis of the
procedure we suppose that an off-line optimal algorithm with cache size
 and
and Landlord with cache size  are running parallel on the input. We also suppose that each page is
placed first into the off-line cache by the off-line algorithm and then
it is placed into
are running parallel on the input. We also suppose that each page is
placed first into the off-line cache by the off-line algorithm and then
it is placed into  by the on-line algorithm. We denote the set of the pages contained in the actual cache of the optimal off-line algorithm by
by the on-line algorithm. We denote the set of the pages contained in the actual cache of the optimal off-line algorithm by OPT. Consider the following potential function

The changes of the potential function during the different steps are as follows

OPT places  into its cache.
into its cache.
In this case OPT has cost  . In the potential function only the second part may change. On the other hand,
. In the potential function only the second part may change. On the other hand,  , thus the increase of the potential function is at most
, thus the increase of the potential function is at most  .
.

Landlord decreases the credit value for each  .
.
In this case for each  the decrease of
the decrease of  is
is  , thus the decrease of
, thus the decrease of  is
is

where  and
and  denote the total size of the pages contained in sets
denote the total size of the pages contained in sets  and
and  , respectively. At the time when this step is performed,
, respectively. At the time when this step is performed, OPT have already placed page  into its cache
into its cache  , but the page is not contained in cache
, but the page is not contained in cache  . Therefore
. Therefore  . On the other hand, this step is performed if there is not enough space for the page in
. On the other hand, this step is performed if there is not enough space for the page in  thus
thus  , which yields
, which yields  , because the sizes are positive integers. Therefore we obtain that the decrease of
, because the sizes are positive integers. Therefore we obtain that the decrease of  is at least
is at least

Since  and
and  , this decrease is at least
, this decrease is at least  .
.

Landlord evicts a page  from cache
from cache  .
.
Since Landlord only evicts pages having credit  , during this step
, during this step  remains unchanged.
remains unchanged.

Landlord places page  into cache
into cache  and sets the value
and sets the value  .
.
The cost of Landlord is  . On the other hand,
. On the other hand,  was not contained in cache
was not contained in cache  before the performance of this step, thus
before the performance of this step, thus  was valid. Furthermore, first
was valid. Furthermore, first OPT places the page into its cache, thus  is also valid. Therefore the decrease of
is also valid. Therefore the decrease of  is
is  .
.

Landlord resets the credit of a page  to a value between
to a value between  and
and  .
.
In this case  is valid, since
is valid, since OPT places page  into its cache first. Value
into its cache first. Value  is not decreased and
is not decreased and  , thus
, thus  can not increase during this step.
can not increase during this step.
Hence the potential function has the following properties.
 If
If OPT places a page into its cache, then the increase of the potential function is at most  times more than the cost of
times more than the cost of OPT.
 If
If Landlord places a page into its cache, then the decrease of  is
is  times more than the cost of
times more than the cost of Landlord.
 During the other steps
During the other steps  does not increase.
does not increase.
By the above properties we obtain that  , where
, where  and
and  are the starting and final values of the potential function. The potential function is nonnegative, thus we obtain that
are the starting and final values of the potential function. The potential function is nonnegative, thus we obtain that  , which proves that
, which proves that Landlord is  -competitive.
-competitive.
In computer networks the congestion of the communication channels decreases the speed of the communication and may cause loss of information. Thus congestion control is one of the most important problems in the area of computer networks. A related important problem is the routing of the communication, where we have to determine the path of the messages in the network. Since we have no information about the further traffic of the network, thus routing is an on-line problem. Here we present two on-line optimisation models for the routing problem.
The mathematical model
The network is given by a graph, each edge  has a maximal available bandwidth denoted by
has a maximal available bandwidth denoted by  and the number of edges is denoted by
and the number of edges is denoted by  . The input is a sequence of requests, where the
. The input is a sequence of requests, where the  -th request is given by a vector
-th request is given by a vector  which means that to satisfy the request bandwidth
which means that to satisfy the request bandwidth  must be reserved on a path from
must be reserved on a path from  to
to  for time duration
for time duration  and the benefit of serving a request is
and the benefit of serving a request is  . Hereafter, we assume that
. Hereafter, we assume that  , and we omit the value of
, and we omit the value of  from the requests. The problem is on-line which means that after the
arrival of a request the algorithm has to make the decisions without
any information about the further requests. We consider the following
two models.
from the requests. The problem is on-line which means that after the
arrival of a request the algorithm has to make the decisions without
any information about the further requests. We consider the following
two models.
Load balancing model: In this model all requests must be satisfied. Our aim is to minimise the maximum of the overload of the edges. The overload is the ratio of the total bandwidth assigned to the edge and the available bandwidth. Since each request is served, thus the benefit is not significant in this model.
Throughput model: In this model the decision maker is allowed to reject some requests. The sum of the bandwidths reserved on an edge can not be more than the available bandwidth. The goal is to maximise the sum of the benefits of the accepted requests. We investigate this model in details. It is important to note that this is a maximisation problem thus the notion of competitiveness is used in the form defined for maximisation problems.
Below we define the exponential algorithm. We need the following notations to define and analyse the algorithm. Let  denote the path which is assigned to the accepted request
denote the path which is assigned to the accepted request  . Let
. Let  denote the set of requests accepted by the on-line algorithm. In this case
denote the set of requests accepted by the on-line algorithm. In this case  is the ratio of the total reserved bandwidth and the available bandwidth on
is the ratio of the total reserved bandwidth and the available bandwidth on  before the arrival of request
before the arrival of request  .
.
The basic idea of the exponential algorithm is the following. The algorithm assigns a cost to each  , which is exponential in
, which is exponential in  and chooses the path which has the minimal cost. Below we define and
analyse the exponential algorithm for the throughput model. Let
and chooses the path which has the minimal cost. Below we define and
analyse the exponential algorithm for the throughput model. Let  be a constant which depends on the parameters of the problem; its value will be given later. Let
be a constant which depends on the parameters of the problem; its value will be given later. Let  , for each request
, for each request  and edge
and edge  . The exponential algorithm performs the following steps after the arrival of a request
. The exponential algorithm performs the following steps after the arrival of a request  .
.
EXP(
)
1 letbe the set of the paths
2
3
IF4
THENreserve bandwidthon path
5
ELSEreject the request
Note. If we modify this algorithm to accept each request, then we obtain an exponential algorithm for the load balancing model.
Example 9.6 Consider the network which contains vertices  and edges
and edges  , where the available bandwidths of the edges are
, where the available bandwidths of the edges are  ,
,  ,
,  ,
,  . Suppose that
. Suppose that  and that the reserved bandwidths are:
and that the reserved bandwidths are:  on path
on path  ,
,  on path
on path  ,
,  on path
on path  ,
,  on path
on path  . The next request
. The next request  is to reserve bandwidth
is to reserve bandwidth  on some path between
on some path between  and
and  . Therefore values
. Therefore values  are:
are:  ,
,  ,
,  ,
,  . There are two paths between
. There are two paths between  and
and  and the costs are
and the costs are


The minimal cost belongs to path  . Therefore, if
. Therefore, if  , then the request is accepted and the bandwidth is reserved on path
, then the request is accepted and the bandwidth is reserved on path  . Otherwise the request is rejected.
. Otherwise the request is rejected.
To analyse the algorithm consider an arbitrary input sequence  . Let
. Let  denote the set of the requests accepted by
denote the set of the requests accepted by EXP, and  the set of the requests which are accepted by
the set of the requests which are accepted by OPT and rejected by EXP. Furthermore let  denote the path reserved by
denote the path reserved by OPT for each request  accepted by
accepted by OPT. Define the value  for each
for each  , which value gives the ratio of the reserved bandwidth and the available bandwidth for
, which value gives the ratio of the reserved bandwidth and the available bandwidth for  at the end of the on-line algorithm. Furthermore, let
at the end of the on-line algorithm. Furthermore, let  for each
for each  .
.
Let  , where
, where  is an upper bound on the benefits and for each request and each edge the inequality
is an upper bound on the benefits and for each request and each edge the inequality
is valid. In this case the following statements hold.
Lemma 9.8 The solution given by algorithm EXP is feasible, i.e. the sum of the reserved bandwidths is not more than the available bandwidth for each edge.
Proof. We prove the statement by contradiction. Suppose that there is an edge  where the available bandwidth is violated. Let
where the available bandwidth is violated. Let  be the first accepted request which violates the available bandwidth on
be the first accepted request which violates the available bandwidth on  .
.
The inequality  is valid for
is valid for  and
and  (it is valid for all edges and requests). Furthermore, after the acceptance of request
(it is valid for all edges and requests). Furthermore, after the acceptance of request  the sum of the bandwidths is greater than the available bandwidth on edge
the sum of the bandwidths is greater than the available bandwidth on edge  , thus we obtain that
, thus we obtain that  . On the other hand, this yields that the inequality
. On the other hand, this yields that the inequality

holds for value  used in algorithm
used in algorithm EXP. Using the assumption on  we obtain that
we obtain that  , and
, and  , thus from the above inequality we obtain that
, thus from the above inequality we obtain that
On the other hand, this inequality is a contradiction, since EXP would reject the request. Therefore we obtained a contradiction thus we proved the statement of the lemma.
Lemma 9.9 For the solution given by OPT the following inequality holds:
Proof. Since EXP rejected each  , thus
, thus  for each
for each  , and this inequality is valid for all paths between
, and this inequality is valid for all paths between  and
and  . Therefore
. Therefore
On the other hand,  holds for each
holds for each  , thus we obtain that
, thus we obtain that

The sum of the bandwidths reserved by OPT is at most the available bandwidth  for each
for each  , thus
, thus  .
.
Consequently
which inequality is the one which we wanted to prove.
Lemma 9.10 For the solution given by algorithm EXP the following inequality holds:

Proof. It is enough to show that the inequality  is valid for each request
is valid for each request  . On the other hand,
. On the other hand,

Since  , if
, if  , and because of the assumptions
, and because of the assumptions  , we obtain that
, we obtain that

Summarising the bounds given above we obtain that

Since EXP accepts the requests with the property  , the above inequality proves the required statement.
, the above inequality proves the required statement.
With the help of the above lemmas we can prove the following theorem.
Theorem 9.11 Algorithm EXP is  -competitive, if
-competitive, if  , where
, where  is an upper bound on the benefits, and for all edges and requests
is an upper bound on the benefits, and for all edges and requests
Proof. From Lemma 9.8
it follows that the algorithm results in a feasible solution where the
available bandwidths are not violated. Using the notations defined
above we obtain that the benefit of algorithm EXP on the input  is
is  , and the benefit of
, and the benefit of OPT is at most  . Therefore by Lemma 9.9 and Lemma 9.10 it follows that
. Therefore by Lemma 9.9 and Lemma 9.10 it follows that

which inequality proves the theorem.
Exercises
9.3-1 Consider the modified version of the data acknowledgement problem with the objective function  , where
, where  is the number of acknowledgements and
is the number of acknowledgements and  is the maximal latency of the
is the maximal latency of the  -th acknowledgement. Prove that algorithm
-th acknowledgement. Prove that algorithm Alarm is also 2-competitive in this modified model.
9.3-2 Represent the special case of the web caching problem, where  for each page
for each page  as a special case of the
as a special case of the  -server problem. Define the metric space which can be used.
-server problem. Define the metric space which can be used.
9.3-3 In the web caching problem cache  of size
of size  contains three pages
contains three pages  with the following sizes and credits:
with the following sizes and credits:  . We want to retrieve a page
. We want to retrieve a page  of size
of size  and retrieval cost
and retrieval cost  . The optimal off-line algorithm
. The optimal off-line algorithm OPT with cache of size  already placed the page into its cache, so its cache contains the pages
already placed the page into its cache, so its cache contains the pages  and
and  . Which pages are evicted by
. Which pages are evicted by Landlord to place  ? In what way does the potential function defined in the proof of Theorem 9.7 change?
? In what way does the potential function defined in the proof of Theorem 9.7 change?
9.3-4 Prove that if in the throughput model no bounds are given for the ratios  , then there is no constant-competitive on-line algorithm.
, then there is no constant-competitive on-line algorithm.
In this section we consider the on-line bin packing problem and its multidimensional generalisations. First we present some fundamental results of the area. Then we define the multidimensional generalisations and present some details from the area of on-line strip packing.
In the bin packing problem the input is a list of items, where the  -th item is given by its size
-th item is given by its size  .
The goal is to pack the items into unit size bins and minimise the
number of the bins used. In a more formal way we can say that we have
to divide the items into groups where each group has the property that
the total size of its items is at most
.
The goal is to pack the items into unit size bins and minimise the
number of the bins used. In a more formal way we can say that we have
to divide the items into groups where each group has the property that
the total size of its items is at most  , and the goal is to minimise the number of groups. This problem appears also in the area of memory management.
, and the goal is to minimise the number of groups. This problem appears also in the area of memory management.
In this section we investigate the on-line problem which means that
the decision maker has to make decisions about the packing of the  -th item based on values
-th item based on values  without any information about the further items.
without any information about the further items.
Algorithm Next-Fit, bounded space algorithms
First we consider the model where the number of the open bins is limited. The  -bounded space model means that if the number of open bins reaches bound
-bounded space model means that if the number of open bins reaches bound  ,
then the algorithm can open a new bin only after closing some of the
bins, and the closed bins cannot be used for packing further items into
them. If only one bin can be open, then the evident algorithm packs the
item into the open bin if it fits, otherwise it closes the bin, opens a
new one and puts the item into it. This algorithm is called
,
then the algorithm can open a new bin only after closing some of the
bins, and the closed bins cannot be used for packing further items into
them. If only one bin can be open, then the evident algorithm packs the
item into the open bin if it fits, otherwise it closes the bin, opens a
new one and puts the item into it. This algorithm is called Next-Fit (NF)
algorithm. We do not present the pseudocode of the algorithm, since it
can be found in this book in the chapter about memory management. The
asymptotic competitive ratio of algorithm NF is determined by the following theorem.
Theorem 9.12 The asymptotic competitive ratio of NF is 2.
Proof. Consider an arbitrary sequence of items, denote it by  . Let
. Let  denote the number of bins used by
denote the number of bins used by OPT and  the number of bins used by
the number of bins used by NF. Furthermore, let  ,
,  denote the total size of the items packed into the
denote the total size of the items packed into the  -th bin by
-th bin by NF.
Then  , since in the opposite case the first item of the
, since in the opposite case the first item of the  -th bin fits into the
-th bin fits into the  -th bin which contradicts to the definition of the algorithm. Therefore the total size of the items is more than
-th bin which contradicts to the definition of the algorithm. Therefore the total size of the items is more than  .
.
On the other hand the optimal off-line algorithm cannot put items with total size more than  into the same bin, thus we obtain that
into the same bin, thus we obtain that  . This yields that
. This yields that  , thus
, thus

Consequently, we proved that the algorithm is asymptotically  -competitive.
-competitive.
Now we prove that the bound is tight. Consider the following sequence for each  denoted by
denoted by  . The sequence contains
. The sequence contains  items, the size of the
items, the size of the  -th item is
-th item is  , the size of the
, the size of the  -th item is
-th item is  ,
,  . Algorithm
. Algorithm NF puts the  -th and the
-th and the  -th items into the
-th items into the  -th bin for each bin, thus
-th bin for each bin, thus  . The optimal off-line algorithm puts pairs of
. The optimal off-line algorithm puts pairs of  size items into the first
size items into the first  bins and it puts one
bins and it puts one  size item and the small items into the
size item and the small items into the  -th bin, thus
-th bin, thus  . Since
. Since  and this function tends to
and this function tends to  as
as  tends to
tends to  , we proved that the asymptotic competitive ratio of the algorithm is at least
, we proved that the asymptotic competitive ratio of the algorithm is at least  .
.
If  , then there are better algorithms than
, then there are better algorithms than NF for the  -bounded space model. The best known bounded space on-line algorithms belong to the family of harmonic algorithms, where the basic idea is that the interval
-bounded space model. The best known bounded space on-line algorithms belong to the family of harmonic algorithms, where the basic idea is that the interval  is divided into subintervals and each item has a type which is the
subinterval of its size. The items of the different types are packed
into different bins. The algorithm runs several
is divided into subintervals and each item has a type which is the
subinterval of its size. The items of the different types are packed
into different bins. The algorithm runs several NF algorithms simultaneously; each for the items of a certain type.
Algorithm First-Fit and the weight function technique
In this section we present the weight function technique which is
often used in the analysis of the bin packing algorithms. We show this
method by analysing algorithm First-Fit (FF).
Algorithm FF
can be used when the number of open bins is not bounded. The algorithm
puts the item into the first opened bin where it fits. If the item does
not fit into any of the bins, then a new bin is opened and the
algorithm puts the item into it. The pseudocode of the algorithm is
also presented in the chapter of memory management. The asymptotic
competitive ratio of the algorithm is bounded above by the following
theorem.
Theorem 9.13 FF is asymptotically 1.7-competitive.
Proof. In the proof we use the weight function technique whose idea is that a weight is assigned to each item to measure in some way how difficult it can be to pack the certain item. The weight function and the total size of the items are used to bound the off-line and on-line objective function values. We use the following weight function
Let  for any set
for any set  of items. The properties of the weight function are summarised in the
following two lemmas. Both lemmas can be proven by case disjunction
based on the sizes of the possible items. The proofs are long and
contain many technical details, therefore we omit them.
of items. The properties of the weight function are summarised in the
following two lemmas. Both lemmas can be proven by case disjunction
based on the sizes of the possible items. The proofs are long and
contain many technical details, therefore we omit them.
Lemma 9.14 If  is valid for a set
is valid for a set  of items, then
of items, then  also holds.
also holds.
Lemma 9.15 For an arbitrary list  of items
of items  .
.
Using these lemmas we can prove that the algorithm is asymptotically 1.7-competitive. Consider an arbitrary list  of items. The optimal off-line algorithm can pack the items of the list into
of items. The optimal off-line algorithm can pack the items of the list into  bins. The algorithm packs items with total size at most
bins. The algorithm packs items with total size at most  into each bin, thus from Lemma 9.14 it follows that
into each bin, thus from Lemma 9.14 it follows that  . On the other hand considering Lemma 9.15 we obtain that
. On the other hand considering Lemma 9.15 we obtain that  , which yields that
, which yields that  , and this inequality proves that the algorithm is asymptotically 1.7-competitive.
, and this inequality proves that the algorithm is asymptotically 1.7-competitive.
It is important to note that the bound is tight, i.e. it is also true that the asymptotic competitive ratio of FF is  . Many algorithms have been developed with smaller asymptotic competitive ratio than
. Many algorithms have been developed with smaller asymptotic competitive ratio than  , the best algorithm known at present time is asymptotically
, the best algorithm known at present time is asymptotically  -competitive.
-competitive.
Lower bounds
In this part we consider the techniques for proving lower bounds on the possible asymptotic competitive ratio. First we present a simple lower bound and then we show how the idea of the proof can be extended into a general method.
Theorem 9.16 No on-line algorithm for the bin packing problem can have smaller asymptotic competitive ratio than 4/3.
Proof. Let  be an arbitrary on-line algorithm. Consider the following sequence of items. Let
be an arbitrary on-line algorithm. Consider the following sequence of items. Let  and
and  be a list of
be a list of  items of size
items of size  , and
, and  be a list of
be a list of  items of size
items of size  . The input is started by
. The input is started by  . Then
. Then  packs two items or one item into the bins. Denote the number of bins containing two items by
packs two items or one item into the bins. Denote the number of bins containing two items by  . In this case the number of the used bins is
. In this case the number of the used bins is  . On the other hand, the optimal off-line algorithm can pack pairs of items into the bins, thus
. On the other hand, the optimal off-line algorithm can pack pairs of items into the bins, thus  .
.
Now suppose that the input is the combined list  . The algorithm is an on-line algorithm, therefore it does not know whether the input is
. The algorithm is an on-line algorithm, therefore it does not know whether the input is  or
or  at the beginning, thus it also uses
at the beginning, thus it also uses  bins for packing two items from the part
bins for packing two items from the part  . Therefore among the items of size
. Therefore among the items of size  only
only  can be paired with earlier items and the other ones need separate bin. Thus
can be paired with earlier items and the other ones need separate bin. Thus  . On the other hand, the optimal off-line algorithm can pack a smaller (size
. On the other hand, the optimal off-line algorithm can pack a smaller (size  ) item and a larger (size
) item and a larger (size  ) item into each bin, thus
) item into each bin, thus  .
.
So we obtained that there is a list for algorithm  where
where

Moreover for the above constructed lists  is at least
is at least  ,
which can be arbitrarily great. This yields that the above inequality
proves that the asymptotic competitive ratio of A is at least
,
which can be arbitrarily great. This yields that the above inequality
proves that the asymptotic competitive ratio of A is at least  , and this is what we wanted to prove.
, and this is what we wanted to prove.
The fundamental idea of the above proof is that a long sequence (in this proof  )
is considered, and depending on the behaviour of the algorithm a prefix
of the sequence is selected as input for which the ratio of the costs
is maximal. It is an evident extension to consider more difficult
sequences. Many lower bounds have been proven based on different
sequences. On the other hand, the computations which are necessary to
analyse the sequence have become more and more difficult. Below we show
how the analysis of such sequences can be interpreted as a mixed
integer programming problem, which makes it possible to use computers
to develop lower bounds.
)
is considered, and depending on the behaviour of the algorithm a prefix
of the sequence is selected as input for which the ratio of the costs
is maximal. It is an evident extension to consider more difficult
sequences. Many lower bounds have been proven based on different
sequences. On the other hand, the computations which are necessary to
analyse the sequence have become more and more difficult. Below we show
how the analysis of such sequences can be interpreted as a mixed
integer programming problem, which makes it possible to use computers
to develop lower bounds.
Consider the following sequence of items. Let  , where
, where  contains
contains  identical items of size
identical items of size  . If algorithm
. If algorithm  is asymptotically
is asymptotically  -competitive, then the inequality
-competitive, then the inequality
is valid for each  .
It is enough to consider an algorithm for which the technique can
achieve the minimal lower bound, thus our aim is to determine the value
.
It is enough to consider an algorithm for which the technique can
achieve the minimal lower bound, thus our aim is to determine the value

which value gives a lower bound on the possible asymptotic competitive ratio. We can determine this value as an optimal solution of a mixed integer programming problem. To define this problem we need the following definitions.
The contain of a bin can be described by the packing pattern of the
bin, which gives that how many elements are contained in the bin from
each subsequence. Formally, a packing pattern is a  -dimensional vector
-dimensional vector  , where coordinate
, where coordinate  is the number of elements contained in the bin from subsequence
is the number of elements contained in the bin from subsequence  . For the packing patterns the constraint
. For the packing patterns the constraint  must hold. (This constraint ensures that the items described by the packing pattern fit into the bin.)
must hold. (This constraint ensures that the items described by the packing pattern fit into the bin.)
Classify the set  of the possible packing patterns. For each
of the possible packing patterns. For each  let
let  be the set of the patterns for which the first positive coordinate is the
be the set of the patterns for which the first positive coordinate is the  -th one. (Pattern
-th one. (Pattern  belongs to class
belongs to class  if
if  for each
for each  and
and  .)
.)
Consider the packing produced by A. Each bin is packed by some
packing pattern, therefore the packing can be described by the packing
patterns. For each  denote the number of bins which are packed by the pattern
denote the number of bins which are packed by the pattern  by
by  . The packing produced by the algorithm is given by variables
. The packing produced by the algorithm is given by variables  .
.
Observe that the bins which are packed by a pattern from class  receive their first element from subsequence
receive their first element from subsequence  . Therefore we obtain that the number of bins opened by A to pack the elements of subsequence
. Therefore we obtain that the number of bins opened by A to pack the elements of subsequence  can be given by variables
can be given by variables  as follows
as follows
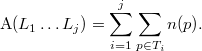
Consequently, for a given  the required value
the required value  can be determined by the solution of the following mixed integer programming problem.
can be determined by the solution of the following mixed integer programming problem.
Min 

 ,
,
 .
.
The first  constraints describe that the algorithm has to pack all items. The second
constraints describe that the algorithm has to pack all items. The second  constraints describe that
constraints describe that  is at least as large as the ratio of the on-line and off-line costs for the subsequences considered.
is at least as large as the ratio of the on-line and off-line costs for the subsequences considered.
The set  of the possible packing patterns and also the optimal solutions
of the possible packing patterns and also the optimal solutions  can be determined by the list
can be determined by the list  .
.
In this problem the number and the value of the variables can be
large, thus instead of the problem its linear programming relaxation is
considered. Moreover, we are interested in the solution under the
assumption that  tends to
tends to  and it can be proven that the integer programming and the linear programming relaxation give the same bound in this case.
and it can be proven that the integer programming and the linear programming relaxation give the same bound in this case.
The best currently known bound was proven by this method and it
states that no on-line algorithm can have smaller asymptotic
competitive ratio than  .
.
The bin packing problem has three different multidimensional
generalisations: the vector packing, the box packing and the strip
packing models. We consider only the strip packing problem in details.
For the other generalisations we give only the model. In the vector packing problem the input is a list of  -dimensional
vectors, and the algorithm has to pack these vectors into the minimal
number of bins. A packing is legal for a bin if for each coordinate the
sum of the values of the elements packed into the bin is at most
-dimensional
vectors, and the algorithm has to pack these vectors into the minimal
number of bins. A packing is legal for a bin if for each coordinate the
sum of the values of the elements packed into the bin is at most  .
In the on-line version the vectors are coming one by one and the
algorithm has to assign the vectors to the bins without any information
about the further vectors. In the box packing problem the input is a list of
.
In the on-line version the vectors are coming one by one and the
algorithm has to assign the vectors to the bins without any information
about the further vectors. In the box packing problem the input is a list of  -dimensional
boxes and the goal is to pack the items into the minimal number of
d-dimensional unit cube without overlapping. In the on-line version the
items are coming one by one and the algorithm has to pack them into the
cubes without any information about the further items.
-dimensional
boxes and the goal is to pack the items into the minimal number of
d-dimensional unit cube without overlapping. In the on-line version the
items are coming one by one and the algorithm has to pack them into the
cubes without any information about the further items.
On-line strip packing
In the strip packing problem
there is a set of two dimensional rectangles, defined by their widths
and heights, and the task is to pack them into a vertical strip of
width  without rotation minimising the total height of the strip. We assume that the widths of the rectangles is at most
without rotation minimising the total height of the strip. We assume that the widths of the rectangles is at most  and the heights of the rectangles is at most
and the heights of the rectangles is at most  .
This problem appears in many situations. Usually, scheduling of tasks
with shared resource involves two dimensions, namely the resource and
the time. We can consider the widths as the resources and the heights
as the times. Our goal is to minimise the total amount of time used.
Some applications can be found in computer scheduling problems. We
consider the on-line version where the rectangles arrive from a list
one by one and we have to pack each rectangle into the vertical strip
without any information about the further items. Most of the algorithms
developed for the strip packing problem belong to the class of shelf
algorithms. We consider this family of algorithms below.
.
This problem appears in many situations. Usually, scheduling of tasks
with shared resource involves two dimensions, namely the resource and
the time. We can consider the widths as the resources and the heights
as the times. Our goal is to minimise the total amount of time used.
Some applications can be found in computer scheduling problems. We
consider the on-line version where the rectangles arrive from a list
one by one and we have to pack each rectangle into the vertical strip
without any information about the further items. Most of the algorithms
developed for the strip packing problem belong to the class of shelf
algorithms. We consider this family of algorithms below.
Shelf algorithms
A basic way of packing into the strip is to define shelves and pack the rectangles onto the shelves. By shelf we mean a rectangular part of the strip. Shelf packing algorithms place each rectangle onto one of the shelves. If the algorithm decides which shelf will contain the rectangle, then the rectangle is placed onto the shelf as much to the left as it is possible without overlapping the other rectangles placed onto the shelf earlier. Therefore, after the arrival of a rectangle, the algorithm has to make two decisions. The first decision is whether to create a new shelf or not. If the algorithm creates a new shelf, it also has to decide the height of the new shelf. The created shelves always start from the top of the previous shelf. The first shelf is placed to the bottom of the strip. The algorithm also has to choose which shelf to put the rectangle onto. Hereafter we will say that it is possible to pack a rectangle onto a shelf, if there is enough room for the rectangle on the shelf. It is obvious that if a rectangle is higher than a shelf, we cannot place it onto the shelf.
We consider only one algorithm in details. This algorithm was
developed and analysed by Baker and Schwarz in 1983 and it is called Next-Fit-Shelf ( ) algorithm. The algorithm depends on a parameter
) algorithm. The algorithm depends on a parameter  . For each
. For each  there is at most one active shelf with height
there is at most one active shelf with height  . We define how the algorithm works below.
. We define how the algorithm works below.
After the arrival of a rectangle  choose a value for
choose a value for  which satisfies
which satisfies  . If there is an active shelf with height
. If there is an active shelf with height  and it is possible to pack the rectangle onto it, then pack it there. If there is no active shelf with height
and it is possible to pack the rectangle onto it, then pack it there. If there is no active shelf with height  , or it is not possible to pack the rectangle onto the active shelf with height
, or it is not possible to pack the rectangle onto the active shelf with height  , then create a new shelf with height
, then create a new shelf with height  , put the rectangle onto it, and let this new shelf be the active shelf with height
, put the rectangle onto it, and let this new shelf be the active shelf with height  (if we had an active shelf with height
(if we had an active shelf with height  earlier, then we close it).
earlier, then we close it).
Example 9.7 Let  . Suppose that the size of the first item is
. Suppose that the size of the first item is  . Therefore, it is assigned to a shelf of height
. Therefore, it is assigned to a shelf of height  . We define a shelf of height
. We define a shelf of height  at the bottom of the strip; this will be the active shelf with height
at the bottom of the strip; this will be the active shelf with height  and we place the item into the left corner of this shelf. Suppose that the size of the next item is
and we place the item into the left corner of this shelf. Suppose that the size of the next item is  . In this case it is placed onto a shelf of height
. In this case it is placed onto a shelf of height  . There is no active shelf with this height so we define a new shelf of height
. There is no active shelf with this height so we define a new shelf of height  on the top of the previous shelf. This will be the active shelf of height
on the top of the previous shelf. This will be the active shelf of height  and the item is placed onto its left corner. Suppose that the size of the next item is
and the item is placed onto its left corner. Suppose that the size of the next item is  . This item is placed onto a shelf of height
. This item is placed onto a shelf of height  . It is not possible to pack it onto the active shelf, thus we close the active shelf and we define a new shelf of height
. It is not possible to pack it onto the active shelf, thus we close the active shelf and we define a new shelf of height  on the top of the previous shelf. This will be the active shelf of height
on the top of the previous shelf. This will be the active shelf of height  and the item is placed into its left corner. Suppose that the size of the next item is
and the item is placed into its left corner. Suppose that the size of the next item is  . This item is placed onto a shelf of height
. This item is placed onto a shelf of height  . We can pack it onto the active shelf of height
. We can pack it onto the active shelf of height  , thus we pack it onto that shelf as left as it is possible.
, thus we pack it onto that shelf as left as it is possible.
For the competitive ratio of  the following statements are valid.
the following statements are valid.
Theorem 9.17 Algorithm  is
is  -competitive. Algorithm
-competitive. Algorithm  is asymptotically
is asymptotically  -competitive.
-competitive.
Proof. First we prove that the algorithm is  -competitive. Consider an arbitrary list of rectangles and denote it by
-competitive. Consider an arbitrary list of rectangles and denote it by  . Let
. Let  denote the sum of the heights of the shelves which are active at the end of the packing, and let
denote the sum of the heights of the shelves which are active at the end of the packing, and let  be the sum of the heights of the other shelves. Let
be the sum of the heights of the other shelves. Let  be the height of the highest active shelf (
be the height of the highest active shelf ( for some
for some  ), and let
), and let  be the height of the highest rectangle. Since the algorithm created a shelf with height
be the height of the highest rectangle. Since the algorithm created a shelf with height  , we have
, we have  . As there is at most
. As there is at most  active shelf for each height,
active shelf for each height,

Consider the shelves which are not active at the end. Consider the shelves of height  for each
for each  , and denote the number of the closed shelves by
, and denote the number of the closed shelves by  . Let
. Let  be one of these shelves with height
be one of these shelves with height  . The next shelf
. The next shelf  with height
with height  contains one rectangle which would not fit onto
contains one rectangle which would not fit onto  . Therefore, the total width of the rectangles is at least
. Therefore, the total width of the rectangles is at least  . Furthermore, the height of these rectangles is at least
. Furthermore, the height of these rectangles is at least  , thus the total area of the rectangles packed onto
, thus the total area of the rectangles packed onto  and
and  is at least
is at least  . If we pair the shelves of height
. If we pair the shelves of height  for each
for each  in this way, using the active shelf if the number of the shelves of the
considered height is odd, we obtain that the total area of the
rectangles assigned to the shelves of height
in this way, using the active shelf if the number of the shelves of the
considered height is odd, we obtain that the total area of the
rectangles assigned to the shelves of height  is at least
is at least  . Thus the total area of the rectangles is at least
. Thus the total area of the rectangles is at least  , and this yields that
, and this yields that  . On the other hand, the total height of the closed shelves is
. On the other hand, the total height of the closed shelves is  , and we obtain that
, and we obtain that  .
.
Since  is valid we proved the required inequality
is valid we proved the required inequality

Since the heights of the rectangles are bounded by  ,
,  and
and  are bounded by a constant, so we obtain the result about the asymptotic competitive ratio immediately.
are bounded by a constant, so we obtain the result about the asymptotic competitive ratio immediately.
Besides this algorithm some other shelf algorithms have been
investigated for the solution of the problem. We can interpret the
basic idea of  as follows. We define classes of items belonging to types of shelves,
and the rectangles assigned to the classes are packed by the classical
bin packing algorithm
as follows. We define classes of items belonging to types of shelves,
and the rectangles assigned to the classes are packed by the classical
bin packing algorithm NF.
It is an evident idea to use other bin packing algorithms. The best
shelf algorithm known at present time was developed by Csirik and
Woeginger in 1997. That algorithm uses the harmonic bin packing
algorithm to pack the rectangles assigned to the classes.
Exercises
9.4-1 Suppose that the size of the items is bounded above by  . Prove that under this assumption the asymptotic competitive ratio of
. Prove that under this assumption the asymptotic competitive ratio of NF is  .
.
9.4-2 Suppose that the size of the items is bounded above by  . Prove Lemma 9.15 under this assumption.
. Prove Lemma 9.15 under this assumption.
9.4-3 Suppose that the sequence of items is given by a list  , where
, where  contains
contains  items of size
items of size  ,
,  contains
contains  items of size
items of size  ,
,  contains
contains  items of size
items of size  . Which packing patterns can be used? Which patterns belong to class
. Which packing patterns can be used? Which patterns belong to class  ?
?
9.4-4 Consider the version of the strip packing problem where one
can lengthen the rectangles keeping the area fixed. Consider the
extension of  which lengthen the rectangles before the packing to the same height as
the shelf which is chosen to pack them onto. Prove that this algorithm
is
which lengthen the rectangles before the packing to the same height as
the shelf which is chosen to pack them onto. Prove that this algorithm
is  -competitive.
-competitive.
The area of scheduling theory has a huge literature. The first result in on-line scheduling belongs to Graham, who analysed the List scheduling algorithm in 1966. We can say that despite of the fact that Graham did not use the terminology which was developed in the area of the on-line algorithms, and he did not consider the algorithm as an on-line algorithm, he analysed it as an approximation algorithm.
From the area of scheduling we only recall the definitions which are used in this chapter.
In a scheduling problem we have to find an optimal schedule of jobs. We consider the parallel machines case, where  machines are given, and we can use them to schedule the jobs. In the
most fundamental model each job has a known processing time and to
schedule the job we have to assign it to a machine, and we have to give
its starting time and a completion time, where the difference between
the completion time and the starting time is the processing time. No
machine may simultaneously run two jobs.
machines are given, and we can use them to schedule the jobs. In the
most fundamental model each job has a known processing time and to
schedule the job we have to assign it to a machine, and we have to give
its starting time and a completion time, where the difference between
the completion time and the starting time is the processing time. No
machine may simultaneously run two jobs.
Concerning the machine environment three different models are
considered. If the processing time of a job is the same for each
machine, then we call the machines identical machines. If each machine
has a speed  , the jobs have a processing weight
, the jobs have a processing weight  and the processing time of job
and the processing time of job  on the
on the  -th machine is
-th machine is  , then we call the machines related machines. If the processing time of job
, then we call the machines related machines. If the processing time of job  is given by an arbitrary positive vector
is given by an arbitrary positive vector  , where the processing time of the job on the
, where the processing time of the job on the  -th machine is
-th machine is  , then we call the machines unrelated machines.
, then we call the machines unrelated machines.
Many objective functions are considered for scheduling problems, but here we consider only such models where the goal is the minimisation of the makespan (the maximal completion time).
In the next subsection we define the two most fundamental on-line scheduling models, and in the following two subsections we consider these models in details.
Probably the following models are the most fundamental examples of on-line machine scheduling problems.
LIST model
In this model we have a fixed number of machines denoted by  ,
and the jobs arrive from a list. This means that the jobs and their
processing times are revealed to the on-line algorithm one by one. When
a job is revealed, the on-line algorithm has to assign the job to a
machine with a starting time and a completion time irrevocably.
,
and the jobs arrive from a list. This means that the jobs and their
processing times are revealed to the on-line algorithm one by one. When
a job is revealed, the on-line algorithm has to assign the job to a
machine with a starting time and a completion time irrevocably.
By the load of a machine, we mean the sum of the processing times of all jobs assigned to the machine. Since the objective function is to minimise the maximal completion time, it is enough to consider the schedules where the jobs are scheduled on the machines without idle time. For these schedules the maximal completion time is the load for each machine. Therefore this scheduling problem is reduced to a load balancing problem, i.e. the algorithm has to assign the jobs to the machines minimising the maximum load, which is the makespan in this case.
Example 9.8 Consider
the LIST model and two identical machines. Consider the following
sequence of jobs where the jobs are given by their processing time:  . The on-line algorithm first receives job
. The on-line algorithm first receives job  from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine
from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine  . After that the on-line algorithm receives job
. After that the on-line algorithm receives job  from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine
from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine  . After that the on-line algorithm receives job
. After that the on-line algorithm receives job  from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine
from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine  . Finally, the on-line algorithm receives job
. Finally, the on-line algorithm receives job  from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine
from the list, and the algorithm has to assign this job to one of the machines. Suppose that the job is assigned to machine  . Then the loads on the machines are
. Then the loads on the machines are  and
and  ,
and we can give a schedule where the maximal completion times on the
machines are the loads: we can schedule the jobs on the first machine
in time intervals
,
and we can give a schedule where the maximal completion times on the
machines are the loads: we can schedule the jobs on the first machine
in time intervals  and
and  , and we can schedule the jobs on the second machine in time intervals
, and we can schedule the jobs on the second machine in time intervals  and
and  .
.
TIME model
In this model there are a fixed number of machines again. Each job has a processing time and a release time.
A job is revealed to the on-line algorithm at its release time. For
each job the on-line algorithm has to choose which machine it will run
on and assign a start time. No machine may simultaneously run two jobs.
Note that the algorithm is not required to assign a job immediately at
its release time. However, if the on-line algorithm assigns a job at
time  then it cannot use information about jobs released after time
then it cannot use information about jobs released after time  and it cannot start the job before time
and it cannot start the job before time  . Our aim is to minimise the makespan.
. Our aim is to minimise the makespan.
Example 9.9 Consider the TIME model with two related machines. Let  be the first machine with speed
be the first machine with speed  , and
, and  be the second machine with speed
be the second machine with speed  . Consider the following input
. Consider the following input  , where the jobs are given by the (processing time, release time) pairs. Thus a job arrives at time
, where the jobs are given by the (processing time, release time) pairs. Thus a job arrives at time  with processing time
with processing time  ,
and the algorithm can either start to process it on one of the machines
or wait for jobs with larger processing time. Suppose that the
algorithm waits till time
,
and the algorithm can either start to process it on one of the machines
or wait for jobs with larger processing time. Suppose that the
algorithm waits till time  and then it starts to process the job on machine
and then it starts to process the job on machine  . The completion time of the job is
. The completion time of the job is  . At time
. At time  three further jobs arrive, and at that time only
three further jobs arrive, and at that time only  can be used. Suppose that the algorithm starts to process job
can be used. Suppose that the algorithm starts to process job  on this machine. At time
on this machine. At time  both jobs are completed. Suppose that the remaining jobs are started on machines
both jobs are completed. Suppose that the remaining jobs are started on machines  and
and  , and the completion times are
, and the completion times are  and
and  , thus the makespan achieved by the algorithm is
, thus the makespan achieved by the algorithm is  . Observe that an algorithm which starts the first job immediately at time
. Observe that an algorithm which starts the first job immediately at time  can make a better schedule with makespan
can make a better schedule with makespan  . But it is important to note that in some cases it can be useful to wait for larger jobs before starting a job.
. But it is important to note that in some cases it can be useful to wait for larger jobs before starting a job.
The first algorithm in this model has been developed by Graham. Algorithm LIST
assigns each job to the machine where the actual load is minimal. If
there are more machines with this property, it uses the machine with
the smallest index. This means that the algorithm tries to balance the
loads on the machines. The competitive ratio of this algorithm is
determined by the following theorem.
Theorem 9.18 The competitive ratio of algorithm LIST is  in the case of identical machines.
in the case of identical machines.
Proof. First we prove that the algorithm is  -competitive. Consider an arbitrary input sequence denoted by
-competitive. Consider an arbitrary input sequence denoted by  , and denote the processing times by
, and denote the processing times by  . Consider the schedule produced by
. Consider the schedule produced by LIST. Let  be a job with maximal completion time. Investigate the starting time
be a job with maximal completion time. Investigate the starting time  of this job. Since
of this job. Since LIST chooses the machine with minimal load, thus the load was at least  on each of the machines when
on each of the machines when  was scheduled. Therefore we obtain that
was scheduled. Therefore we obtain that

This yields that

On the other hand, OPT also processes all of the jobs, thus we obtain that  . Furthermore,
. Furthermore,  is scheduled on one of the machines of
is scheduled on one of the machines of OPT, thus  . Due to these bounds we obtain that
. Due to these bounds we obtain that

which inequality proves that LIST is  -competitive.
-competitive.
Now we prove that the bound is tight. Consider the following input. It contains  jobs with processing time
jobs with processing time  and one job with processing time
and one job with processing time  .
. LIST assigns  small jobs to each machine and the last large job is assigned to
small jobs to each machine and the last large job is assigned to  . Therefore its makespan is
. Therefore its makespan is  . On the other hand, the optimal algorithm schedules the large job on
. On the other hand, the optimal algorithm schedules the large job on  and
and  small jobs on the other machines, and its makespan is
small jobs on the other machines, and its makespan is  . Thus the ratio of the makespans is
. Thus the ratio of the makespans is  which shows that the competitive ratio of
which shows that the competitive ratio of LIST is at least  .
.
Although it is hard to imagine any other algorithm for the on-line
case, many other algorithms have been developed. The competitive ratios
of the better algorithms tend to smaller numbers than  as the number of machines tends to
as the number of machines tends to  .
Most of these algorithms are based on the following idea. The jobs are
scheduled keeping the load uniformly on most of the machines, but in
contrast to
.
Most of these algorithms are based on the following idea. The jobs are
scheduled keeping the load uniformly on most of the machines, but in
contrast to LIST,
the loads are kept low on some of the machines, keeping the possibility
of using these machines for scheduling large jobs which may arrive
later.
Below we consider the more general cases where the machines are not identical. LIST
may perform very badly, and the processing time of a job can be very
large on the machine where the actual load is minimal. However, we can
easily change the greedy idea of LIST as follows. The extended algorithm is called Greedy
and it assigns the job to the machine where the load with the
processing time of the job is minimal. If there are several machines
which have minimal value, then the algorithm chooses the machine where
the processing time of the job is minimal from them, if there are
several machines with this property, the algorithm chooses the one with
the smallest index from them.
Example 9.10 Consider the case of related machines where there are  machines
machines  and the speeds are
and the speeds are  ,
,  . Suppose that the input is
. Suppose that the input is  , where the jobs are defined by their processing weight. The load after the first job is
, where the jobs are defined by their processing weight. The load after the first job is  on machine
on machine  and
and  on the other machines, thus
on the other machines, thus  is assigned to
is assigned to  . The load after job
. The load after job  is
is  on all of the machines, and its processing time is minimal on machine
on all of the machines, and its processing time is minimal on machine  , thus
, thus Greedy assigns it to  . The load after job
. The load after job  is
is  on
on  and
and  , and
, and  on
on  , thus the job is assigned to
, thus the job is assigned to  . The load after job
. The load after job  is
is  on
on  ,
,  on
on  , and
, and  on
on  , thus the job is assigned to
, thus the job is assigned to  . Finally, the load after job
. Finally, the load after job  is
is  on
on  ,
,  on and
on and  , and
, and  on
on  , thus the job is assigned to
, thus the job is assigned to  .
.
Example 9.11 Consider the case of unrelated machines with two machines and the following input:  , where the jobs are defined by the vectors of processing times. The load after job
, where the jobs are defined by the vectors of processing times. The load after job  is
is  on
on  and
and  on
on  , thus the job is assigned to
, thus the job is assigned to  . The load after job
. The load after job  is
is  on
on  and also on
and also on  , thus the job is assigned to
, thus the job is assigned to  , because it has smaller processing time. The load after job
, because it has smaller processing time. The load after job  is
is  on
on  and
and  , thus the job is assigned to
, thus the job is assigned to  because it has smaller processing time. Finally, the load after job
because it has smaller processing time. Finally, the load after job  is
is  on
on  and
and  on
on  , thus the job is assigned to
, thus the job is assigned to  .
.
The competitive ratio of the algorithm is determined by the following theorems.
Theorem 9.19 The competitive ratio of algorithm Greedy is  in the case of unrelated machines.
in the case of unrelated machines.
Proof. First we prove that the competitive ratio of the algorithm is at least  . Consider the following input sequence. Let
. Consider the following input sequence. Let  be an arbitrarily small number. The sequence contains
be an arbitrarily small number. The sequence contains  jobs. The processing time of job
jobs. The processing time of job  is
is  on machine
on machine  ,
,  on machine
on machine  , and
, and  on the other machines, (
on the other machines, ( ). For job
). For job  ,
,  the processing time is
the processing time is  on machine
on machine  ,
,  on machine
on machine  and
and  on the other machines (
on the other machines ( ,
,  ,
,  , if
, if  and
and  ).
).
In this case job  is scheduled on
is scheduled on  by
by Greedy and the makespan is  . On the other hand, the optimal off-line algorithm schedules
. On the other hand, the optimal off-line algorithm schedules  on
on  and
and  is scheduled on
is scheduled on  for the other jobs, thus the optimal makespan is
for the other jobs, thus the optimal makespan is  . The ratio of the makespans is
. The ratio of the makespans is  . This ratio tends to
. This ratio tends to  , as
, as  tends to
tends to  , and this proves that the competitive ratio of the algorithm is at least
, and this proves that the competitive ratio of the algorithm is at least  .
.
Now we prove that the algorithm is  -competitive. Consider an arbitrary input sequence, denote the makespan in the optimal off-line schedule by
-competitive. Consider an arbitrary input sequence, denote the makespan in the optimal off-line schedule by  and let
and let  denote the maximal load in the schedule produced by
denote the maximal load in the schedule produced by Greedy after scheduling the first  jobs. Since the processing time of the
jobs. Since the processing time of the  -th job is at least
-th job is at least  , and the load is at most
, and the load is at most  on the machines in the off-line optimal schedule, we obtain that
on the machines in the off-line optimal schedule, we obtain that  .
.
We prove by induction that the inequality  is valid. Since the first job is assigned to the machine where its
processing time is minimal, the statement is obviously true for
is valid. Since the first job is assigned to the machine where its
processing time is minimal, the statement is obviously true for  . Let
. Let  be an arbitrary number and suppose that the statement is true for
be an arbitrary number and suppose that the statement is true for  . Consider the
. Consider the  -th job. Let
-th job. Let  be the machine where the processing time of this job is minimal. If we assign the job to
be the machine where the processing time of this job is minimal. If we assign the job to  , then we obtain that the load on this machines is at most
, then we obtain that the load on this machines is at most  from the induction hypothesis.
from the induction hypothesis.
On the other hand, the maximal load in the schedule produced by Greedy can not be more than the maximal load in the case when the job is assigned to  , thus
, thus  , which means that we proved the inequality for
, which means that we proved the inequality for  .
.
Therefore we obtained that  , which yields that the algorithm is
, which yields that the algorithm is  -competitive.
-competitive.
To investigate the case of the related machines consider an arbitrary input. Let  and
and  denote the makespans achieved by
denote the makespans achieved by GREEDY and OPT respectively. The analysis of the algorithm is based on the following lemmas which give bounds on the loads of the machines.
Lemma 9.20 The load on the fastest machine is at least  .
.
Proof. Consider the schedule produced by GREEDY. Consider a job  which causes the makespan (its completion time is maximal). If this job
is scheduled on the fastest machine, then the lemma follows
immediately, i.e. the load on the fastest machine is
which causes the makespan (its completion time is maximal). If this job
is scheduled on the fastest machine, then the lemma follows
immediately, i.e. the load on the fastest machine is  . Suppose that
. Suppose that  is not scheduled on the fastest machine. The optimal maximal load is
is not scheduled on the fastest machine. The optimal maximal load is  , thus the processing time of
, thus the processing time of  on the fastest machine is at most
on the fastest machine is at most  . On the other hand, the completion time of
. On the other hand, the completion time of  is
is  , thus at the time when the job was scheduled the load was at least
, thus at the time when the job was scheduled the load was at least  on the fastest machine, otherwise
on the fastest machine, otherwise Greedy would assign  to the fastest machine.
to the fastest machine.
Lemma 9.21 If the loads are at least  on all machines having a speed of at least
on all machines having a speed of at least  then the loads are at least
then the loads are at least  on all machines having a speed of at least
on all machines having a speed of at least  .
.
Proof. If  , then the statement is obviously valid. Suppose that
, then the statement is obviously valid. Suppose that  . Consider the jobs which are scheduled by
. Consider the jobs which are scheduled by Greedy on the machines having a speed of at least  in the time interval
in the time interval  . The total processing weight of these jobs is at least
. The total processing weight of these jobs is at least  times the total speed of the machines having a speed of at least
times the total speed of the machines having a speed of at least  . This yields that there exists a job among them which is assigned by
. This yields that there exists a job among them which is assigned by OPT to a machine having a speed of smaller than  (otherwise the optimal off-line makespan would be larger than
(otherwise the optimal off-line makespan would be larger than  ). Let
). Let  be such a job.
be such a job.
Since OPT schedules  on a machine having a speed of smaller than
on a machine having a speed of smaller than  , thus the processing weight of
, thus the processing weight of  is at most
is at most  . This yields that the processing time of
. This yields that the processing time of  is at most
is at most  on the machines having a speed of at least
on the machines having a speed of at least  . On the other hand,
. On the other hand, Greedy produces a schedule where the completion time of  is at least
is at least  , thus at the time when the job was scheduled the loads were at least
, thus at the time when the job was scheduled the loads were at least  on the machines having a speed of at most
on the machines having a speed of at most  (otherwise
(otherwise Greedy would assign  to one of these machines).
to one of these machines).
Now we can prove the following statement.
Theorem 9.22 The competitive ratio of algorithm Greedy is  in the case of the related machines.
in the case of the related machines.
Proof. First we prove that Greedy is  -competitive. Consider an arbitrary input. Let
-competitive. Consider an arbitrary input. Let  and
and  denote the makespans achieved by
denote the makespans achieved by Greedy and OPT, respectively.
Let  be the speed of the fastest machine. Then by Lemma 9.20 the load on this machine is at least
be the speed of the fastest machine. Then by Lemma 9.20 the load on this machine is at least  . Then using Lemma 9.21 we obtain that the loads are at least
. Then using Lemma 9.21 we obtain that the loads are at least  on the machines having a speed of at least
on the machines having a speed of at least  . Therefore the loads are at least
. Therefore the loads are at least  on the machines having a speed of at least
on the machines having a speed of at least  . Denote the set of the machines having a speed of at most
. Denote the set of the machines having a speed of at most  by
by  .
.
Denote the sum of the processing weights of the jobs by  .
. OPT can find a schedule of the jobs which has maximal load  , and there are at most
, and there are at most  machines having smaller speed than
machines having smaller speed than  , thus
, thus

On the other hand, Greedy schedules the same jobs, thus the load on some machine not included in  is smaller than
is smaller than  in the schedule produced by
in the schedule produced by Greedy (otherwise we would obtain that the sum of the processing weights is greater than  ).
).
Therefore we obtain that

which yields that  , which proves that
, which proves that Greedy is  -competitive.
-competitive.
Now we prove that the competitive ratio of the algorithm is at least  . Consider the following set of machines:
. Consider the following set of machines:  contains one machine with speed
contains one machine with speed  and
and  contains
contains  machines with speed
machines with speed  . For each
. For each  ,
,  contains machines with speed
contains machines with speed  , and
, and  contains
contains  machines. Observe that the number of jobs of processing weight
machines. Observe that the number of jobs of processing weight  which can be scheduled during
which can be scheduled during  time unit is the same on the machines of
time unit is the same on the machines of  and on the machines of
and on the machines of  . It is easy to calculate that
. It is easy to calculate that  , if
, if  , thus the number of machines is
, thus the number of machines is  .
.
Consider the following input sequence. In the first phase  jobs arrive having processing weight
jobs arrive having processing weight  , in the second phase
, in the second phase  jobs arrive having processing weight
jobs arrive having processing weight  , in the
, in the  -th phase
-th phase  jobs arrive with processing weight
jobs arrive with processing weight  , and the sequence ends with the
, and the sequence ends with the  -th phase, which contains one job with processing weight
-th phase, which contains one job with processing weight  . An off-line algorithm can schedule the jobs of the
. An off-line algorithm can schedule the jobs of the  -th phase on the machines of set
-th phase on the machines of set  achieving maximal load
achieving maximal load  , thus the optimal off-line cost is at most
, thus the optimal off-line cost is at most  .
.
Investigate the behaviour of algorithm Greedy on this input. The jobs of the first phase can be scheduled on the machines of  during
during  time unit, and it takes also
time unit, and it takes also  time unit to process these jobs on the machines of
time unit to process these jobs on the machines of  . Thus
. Thus Greedy schedules these jobs on the machines of  , and each load is
, and each load is  on these machines after the first phase. Then the jobs of the second phase are scheduled on the machines of
on these machines after the first phase. Then the jobs of the second phase are scheduled on the machines of  , the jobs of the third phase are scheduled on the machines of
, the jobs of the third phase are scheduled on the machines of  and so on. Finally, the jobs of the
and so on. Finally, the jobs of the  -th and
-th and  -th phase are scheduled on the machine of set
-th phase are scheduled on the machine of set  . Thus the cost of
. Thus the cost of Greedy is  , (this is the load on the machine of set
, (this is the load on the machine of set  ). Since
). Since  , we proved the required statement.
, we proved the required statement.
In this model we investigate only one algorithm. The basic idea is
to divide the jobs into groups by the release time and to use an
optimal off-line algorithm to schedule the jobs of the groups. This
algorithm is called interval scheduling algorithm and we denote it by INTV. Let  be the release time of the first job, and
be the release time of the first job, and  . The algorithm is defined by the following pseudocode:
. The algorithm is defined by the following pseudocode:
INTV(
)
1WHILENOTend of sequence 2 letbe the set of the unscheduled jobs released till
3 let
be an optimal off-line schedule of the jobs of
4 schedule the jobs as it is determined by
starting the schedule at
5 let
be the maximal completion time 6
IFa new job is released in time intervalor the sequence is ended 7
THEN7
ELSEletbe the release time of the next job 8

Example 9.12 Consider two identical machines. Suppose that the sequence of jobs is  , where the jobs are defined by the (processing time, release time) pairs. In the first iteration
, where the jobs are defined by the (processing time, release time) pairs. In the first iteration  are scheduled: an optimal off-line algorithm schedules
are scheduled: an optimal off-line algorithm schedules  on machine
on machine  and
and  on machine
on machine  , so the jobs are completed at time
, so the jobs are completed at time  . Since no new job have been released in the time interval
. Since no new job have been released in the time interval  , the algorithm waits for a new job until time
, the algorithm waits for a new job until time  . Then the second iteration starts:
. Then the second iteration starts:  and
and  are scheduled on
are scheduled on  and
and  respectively in the time interval
respectively in the time interval  . During this time interval
. During this time interval  has been released thus at time
has been released thus at time  the next iteration starts and
the next iteration starts and INTV schedules  on
on  in the time interval
in the time interval  .
.
The following statement holds for the competitive ratio of algorithm INTV.
Theorem 9.23 In the TIME model algorithm INTV is 2-competitive.
Proof. Consider an arbitrary input and the schedule produced by INTV. Denote the number of iterations by  . Let
. Let  ,
,  ,
,  and let
and let  denote the optimal off-line cost. In this case
denote the optimal off-line cost. In this case  . This inequality is obvious if
. This inequality is obvious if  . If
. If  , then the inequality holds, because also the optimal off-line algorithm has to schedule the jobs which are scheduled in the
, then the inequality holds, because also the optimal off-line algorithm has to schedule the jobs which are scheduled in the  -th iteration by
-th iteration by INTV, and INTV uses an optimal off-line schedule in each iteration. On the other hand,  . To prove this inequality first observe that the release time is at least
. To prove this inequality first observe that the release time is at least  for the jobs scheduled in the
for the jobs scheduled in the  -th iteration (otherwise the algorithm would schedule them in the
-th iteration (otherwise the algorithm would schedule them in the  -th iteration).
-th iteration).
Therefore also the optimal algorithm has to schedule these jobs after time  . On the the other hand, it takes at least
. On the the other hand, it takes at least  time units to process these jobs, because
time units to process these jobs, because INTV uses optimal off-line algorithm in the iterations. The makespan of the schedule produced by INTV is  , and we have shown that
, and we have shown that  , thus we proved that the algorithm is
, thus we proved that the algorithm is  -competitive.
-competitive.
Some other algorithms have also been developed in the TIME model. Vestjens proved that the on-line LPT algorithm is  -competitive.
This algorithm schedules the longest unscheduled, released job at each
time when some machine is available. The following lower bound for the
possible competitive ratios of the on-line algorithms is also given by
Vestjens.
-competitive.
This algorithm schedules the longest unscheduled, released job at each
time when some machine is available. The following lower bound for the
possible competitive ratios of the on-line algorithms is also given by
Vestjens.
Theorem 9.24 The competitive ratio of any on-line algorithm is at least  in the TIME model for minimising the makespan.
in the TIME model for minimising the makespan.
Proof. Let  be the solution of the equation
be the solution of the equation  which belongs to the interval
which belongs to the interval  . We prove that no on-line algorithm can have smaller competitive ratio than
. We prove that no on-line algorithm can have smaller competitive ratio than  . Consider an arbitrary on-line algorithm, denote it by
. Consider an arbitrary on-line algorithm, denote it by ALG. Investigate the following input sequence.
At time  one job arrives with processing time
one job arrives with processing time  . Let
. Let  be the time when the algorithm starts to process the job on one of the machines. If
be the time when the algorithm starts to process the job on one of the machines. If  , then the sequence is finished and
, then the sequence is finished and  , which proves the statement. So we can suppose that
, which proves the statement. So we can suppose that  .
.
The release time of the next job is  and its processing time is
and its processing time is  . Denote its starting time by
. Denote its starting time by  . If
. If  , then we end the sequence with
, then we end the sequence with  jobs having release time
jobs having release time  , and processing time
, and processing time  . In this case an optimal off-line algorithm schedules the first two jobs on the same machine and the last
. In this case an optimal off-line algorithm schedules the first two jobs on the same machine and the last  jobs on the other machines starting them at time
jobs on the other machines starting them at time  , thus its cost is
, thus its cost is  . On the other hand, the on-line algorithm must schedule one of the last
. On the other hand, the on-line algorithm must schedule one of the last  jobs after the completion of the first or the second job, thus
jobs after the completion of the first or the second job, thus  in this case, which yields that the competitive ratio of the algorithm is at least
in this case, which yields that the competitive ratio of the algorithm is at least  . Therefore we can suppose that
. Therefore we can suppose that  .
.
At time  further
further  jobs arrive with processing times
jobs arrive with processing times  and one job with processing time
and one job with processing time  .
The optimal off-line algorithm schedules the second and the last jobs
on the same machine, and the other jobs are scheduled one by one on the
other machines and the makespan of the schedule is
.
The optimal off-line algorithm schedules the second and the last jobs
on the same machine, and the other jobs are scheduled one by one on the
other machines and the makespan of the schedule is  . Since before time
. Since before time  none of the last
none of the last  jobs is started by
jobs is started by ALG, after this time ALG must schedule at least two jobs on one of the machines and the maximal completion time is at least  . Since
. Since  , the ratio
, the ratio  is minimal if
is minimal if  , and in this case the ratio is
, and in this case the ratio is  , which proves the theorem.
, which proves the theorem.
Exercises
9.5-1 Prove that the competitive ratio is at least  for any on-line algorithm in the case of two identical machines.
for any on-line algorithm in the case of two identical machines.
9.5-2 Prove that LIST is not constant competitive in the case of unrelated machines.
9.5-3 Prove that the modification of INTV which uses a  -approximation schedule (a schedule with at most
-approximation schedule (a schedule with at most  times more cost than the optimal cost) instead of the optimal off-line schedule in each step is
times more cost than the optimal cost) instead of the optimal off-line schedule in each step is  -competitive.
-competitive.
PROBLEMS |
Consider the special case of the  -server problem, where the distance between each pair of points is
-server problem, where the distance between each pair of points is  .
(This problem is equivalent with the on-line paging problem.) Analyse
the algorithm which serves the requests not having server on their
place by the server which was used least recently. (This algorithm is
equivalent with the
.
(This problem is equivalent with the on-line paging problem.) Analyse
the algorithm which serves the requests not having server on their
place by the server which was used least recently. (This algorithm is
equivalent with the LRU paging algorithm.) Prove that the algorithm is  -competitive.
-competitive.
Consider the following alarming algorithm for the data acknowledgement problem. ALARM2 is obtained from the general definition with the values  . Prove that the algorithm is not constant-competitive.
. Prove that the algorithm is not constant-competitive.
Prove, that no on-line algorithm can have smaller competitive ratio than  using a sequence which contains items of size
using a sequence which contains items of size  ,
,  ,
,  , where
, where  is a small positive number.
is a small positive number.
9-4 Strip packing with modifiable rectangles
Consider the following version of the strip packing problem. In the
new model the algorithms are allowed to lengthen the rectangles keeping
the area fixed. Develop a  -competitive algorithm for the solution of the problem.
-competitive algorithm for the solution of the problem.
Consider the algorithm in the TIME model which starts the longest
released job to schedule at each time when a machine is available. This
algorithm is called on-line LPT. Prove that the algorithm is  -competitive.
-competitive.
CHAPTER NOTES |
More details about the results on on-line algorithms can be found in the books [31], [73].
The first results about the  -server problem (Theorems 9.1 and 9.2) are published by Manasse, McGeoch and Sleator in [172]. The presented algorithm for the line (Theorem 9.3) was developed by Chrobak, Karloff, Payne and Viswanathan (see [45]). Later Chrobak and Larmore extended the algorithm for trees in [46]. The first constant-competitive algorithm for the general problem was developed by Fiat, Rabani and Ravid (see [72]).
The best known algorithm is based on the work function technique. The
first work function algorithm for the problem was developed by Chrobak
and Larmore in [47]. Koutsoupias and Papadimitriou have proven that the work function algorithm is
-server problem (Theorems 9.1 and 9.2) are published by Manasse, McGeoch and Sleator in [172]. The presented algorithm for the line (Theorem 9.3) was developed by Chrobak, Karloff, Payne and Viswanathan (see [45]). Later Chrobak and Larmore extended the algorithm for trees in [46]. The first constant-competitive algorithm for the general problem was developed by Fiat, Rabani and Ravid (see [72]).
The best known algorithm is based on the work function technique. The
first work function algorithm for the problem was developed by Chrobak
and Larmore in [47]. Koutsoupias and Papadimitriou have proven that the work function algorithm is  -competitive in [147].
-competitive in [147].
The first mathematical model for the data acknowledgement problem and the first results (Theorems 9.5 and 9.6) are presented by Dooly, Goldman, and Scott in [64]. Online algorithms with lookahead property are presented in [124]. Albers and Bals considered a different objective function in [11]. Karlin Kenyon and Randall investigated randomised algorithms for the data acknowledgement problem in [139]. The Landlord algorithm was developed by Young in [280]. The detailed description of the results in the area of on-line routing can be found in the survey [162]
written by Leonardi. The exponential algorithm for the load balancing
model is investigated by Aspnes, Azar, Fiat, Plotkin and Waarts in [13]. The exponential algorithm for the throughput objective function is applied by Awerbuch, Azar and Plotkin in [16].
A detailed survey about the theory of on-line bin packing is written by Csirik and Woeginger (see [56]). The algorithms NF and FF are analysed with competitive analysis by Johnson, Demers, Ullman, Garey and Graham in [133], [134], further results can be found in the PhD thesis of Johnson ([132]). Our Theorem 9.12 is a special case of Theorem 1 in [126] and Theorem 9.13 is a special case of Theorems 5.8 and 5.9 of the book [48] and Corollary 20.13 in the twentieth chapter of this book [22]. Van Vliet applied the packing patterns to prove lower bounds for the possible competitive ratios in [264], [265]. For the on-line strip packing problem algorithm  was developed and analysed by Baker and Schwarz in [20].
Later further shelf packing algorithms were developed, the best shelf
packing algorithm for the strip packing problem was developed by Csirik
and Woeginger in [57].
was developed and analysed by Baker and Schwarz in [20].
Later further shelf packing algorithms were developed, the best shelf
packing algorithm for the strip packing problem was developed by Csirik
and Woeginger in [57].
A detailed survey about the results in the area of on-line scheduling was written by Sgall ([239]). The first on-line result is the analysis of algorithm LIST, it was published by Graham in [97].
Many further algorithms were developed and analysed for the case of
identical machines, the algorithm with smallest competitive ratio
(tends to 1.9201 as the number of machines tends to  ) was developed by Fleischer and Wahl in [76]. The lower bound for the competitive ratio of
) was developed by Fleischer and Wahl in [76]. The lower bound for the competitive ratio of Greedy in the related machines model was proved by Cho and Sahni in [43].
The upper bound, the related machines case and a more sophisticated
exponential function based algorithm were presented by Aspnes, Azar,
Fiat, Plotkin and Waarts in [13].
A summary of further results about the applications of the exponential
function technique in the area of on-line scheduling can be found in
the paper of Azar ([17]). The interval algorithm presented in the TIME model and Theorem 9.23 are based on the results of Shmoys, Wein and Williamson (see [236]). A detailed description of further results (on-line LPT, lower bounds) in the area TIME model can be found in the PhD thesis of Vestjens [262].
We presented only the most fundamental on-line scheduling models in the
chapter, although an interesting model has been developed recently,
where the number of the machines is not fixed, and the algorithm is
allowed to purchase machines. The model is investigated in papers [65], [66], [123], [125].
Problem 9-1 is based on [244], Problem 9-2 is based on [64], Problem 9-3 is based on [278], Problem 9-4 is based on [122] and Problem 9-5 is based on [262].
Table of Contents
- 10.1 Finite games
- 10.2 Continuous games
- 10.2.1 Fixed-point methods based on best responses
- 10.2.2 Applying Fan's inequality
- 10.2.3 Solving the Kuhn-Tucker conditions
- 10.2.4 Reduction to optimization problems
- 10.2.5 Method of fictitious play
- 10.2.6 Symmetric matrix games
- 10.2.7 Linear programming and matrix games
- 10.2.8 The method of von Neumann
- 10.2.9 Diagonally strictly concave games
- 10.3 The oligopoly problem
In many situations in engineering and economy there are cases when the conflicting interests of several decision makers have to be taken into account simultaneously, and the outcome of the situation depends on the actions of these decision makers. One of the most popular methodology and modeling is based on game theory.
Let  denote the number of decision makers (who will be called players), and for each
denote the number of decision makers (who will be called players), and for each  let
let  be the set of all feasible actions of player
be the set of all feasible actions of player  . The elements
. The elements  are called strategies of player
are called strategies of player  ,
,  is the strategy set of this player. In any realization of the game each player selects a strategy, then the vector
is the strategy set of this player. In any realization of the game each player selects a strategy, then the vector 
 is called a simultaneous strategy vector of the players. For each
is called a simultaneous strategy vector of the players. For each  each player has an outcome which is assumed to be a real value. This
value can be imagined as the utility function value of the particular
outcome, in which this function represents how player
each player has an outcome which is assumed to be a real value. This
value can be imagined as the utility function value of the particular
outcome, in which this function represents how player  evaluates the outcomes of the game. If
evaluates the outcomes of the game. If  denotes this value, then
denotes this value, then  is called the payoff function of player
is called the payoff function of player  . The value
. The value  is called the payoff of player
is called the payoff of player  and
and  is called the payoff vector. The number
is called the payoff vector. The number  of players, the sets
of players, the sets  of strategies and the payoff functions
of strategies and the payoff functions 
 completely determine and define the
completely determine and define the  -person game. We will also use the notation
-person game. We will also use the notation  for this game.
for this game.
The solution of game  is the Nash-equilibrium, which is a simultaneous strategy vector
is the Nash-equilibrium, which is a simultaneous strategy vector  such that for all
such that for all  ,
,
 ;
;  ,
, 
Condition  means that the
means that the  -th component of the equilibrium is a feasible strategy of player
-th component of the equilibrium is a feasible strategy of player  , and condition
, and condition  shows that none of the players can increase its payoff by unilaterally
changing its strategy. In other words, it is the interest of all
players to keep the equilibrium since if any player departs from the
equilibrium, its payoff does not increase.
shows that none of the players can increase its payoff by unilaterally
changing its strategy. In other words, it is the interest of all
players to keep the equilibrium since if any player departs from the
equilibrium, its payoff does not increase.
Game  is called finite if the number of players is finite and all strategy sets
is called finite if the number of players is finite and all strategy sets  contain finitely many strategies. The most famous two-person finite game is the prisoner's dilemma, which is the following.
contain finitely many strategies. The most famous two-person finite game is the prisoner's dilemma, which is the following.
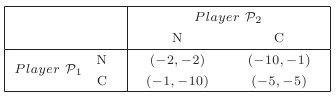
Example 10.1 The
players are two prisoners who committed a serious crime, but the
prosecutor has only insufficient evidence to prosecute them. The
prisoners are held in separate cells and cannot communicate, and the
prosecutor wants them to cooperate with the authorities in order to get
the needed additional information. So  , and the strategy sets for both players have two elements: cooperating (
, and the strategy sets for both players have two elements: cooperating ( ), or not cooperating (
), or not cooperating ( ). It is told to both prisoners privately that if he is the only one to confess, then he will get only a light sentence of
). It is told to both prisoners privately that if he is the only one to confess, then he will get only a light sentence of  year, while the other will go to prison for a period of 10 years. If
both confess, then their reward will be a 5 year prison sentence each,
and if none of them confesses, then they will be convicted to a less
severe crime with sentence of 2 years each. The objective of both
players are to minimize the time spent in prison, or equivalently to
maximize its negative. Figure 10.1 shows the payoff values, where the rows correspond to the strategies of player
year, while the other will go to prison for a period of 10 years. If
both confess, then their reward will be a 5 year prison sentence each,
and if none of them confesses, then they will be convicted to a less
severe crime with sentence of 2 years each. The objective of both
players are to minimize the time spent in prison, or equivalently to
maximize its negative. Figure 10.1 shows the payoff values, where the rows correspond to the strategies of player  , the columns show the strategies of player
, the columns show the strategies of player  , and for each strategy pair the first number is the payoff of player
, and for each strategy pair the first number is the payoff of player  , and the second number is the payoff of player
, and the second number is the payoff of player  . Comparing the payoff values, it is clear that only
. Comparing the payoff values, it is clear that only  can be equilibrium, since
can be equilibrium, since
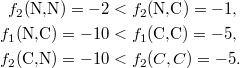
The strategy pair  is really an equilibrium, since
is really an equilibrium, since

In this case we have a unique equilibrium.
The existence of an equilibrium is not guaranteed in general, and if equilibrium exists, it might not be unique.
Example 10.2 Modify the payoff values of Figure10.1 as shown in Figure 10.2. It is easy to see that no equilibrium exists:
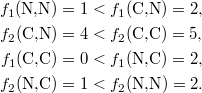
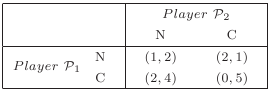
If all payoff values are identical, then we have multiple equilibria: any strategy pair is an equilibrium.
Let  denote the number of players, and for the sake of notational convenience let
denote the number of players, and for the sake of notational convenience let  denote the feasible strategies of player
denote the feasible strategies of player  . That is,
. That is,  . A strategy vector
. A strategy vector  is an equilibrium if and only if for all
is an equilibrium if and only if for all  and
and  ,
,


Notice that in the case of finite games inequality (10.1) reduces to (10.2).
In applying the enumeration method, inequality (10.2) is checked for all possible strategy  -tuples
-tuples  to see if (10.2) holds for all
to see if (10.2) holds for all  and
and  . If it does, then
. If it does, then  is an equilibrium, otherwise not. If during the process of checking for a particular
is an equilibrium, otherwise not. If during the process of checking for a particular  we find a
we find a  and
and  such that (10.2) is violated, then
such that (10.2) is violated, then  is not an equilibrium and we can omit checking further values of
is not an equilibrium and we can omit checking further values of  and
and  . This algorithm is very simple, it consists of
. This algorithm is very simple, it consists of  imbedded loops with variables
imbedded loops with variables  and
and  .
.
The maximum number of comparisons needed equals
however in practical cases it might be much lower, since if (10.2) is violated with some  , then the comparison must stop for the same strategy vector.
, then the comparison must stop for the same strategy vector.
The algorithm can formally be given as follows:
Prisoner-Enumeration(
)
1FOR
TO2
DOFOR
TO3
4
DOFOR
TO5
DO6
FOR
TO7
DOFOR
TO8
DOIF(10.2) fails 9THENand go to 10 10
IF11
THEN() is equilibrium 12
RETURN()
Consider next the two-person case,  , and introduce the
, and introduce the  real matrixes
real matrixes  and
and  with
with  elements
elements  and
and  respectively. Matrixes
respectively. Matrixes  and
and  are called the payoff matrixes of the two players. A strategy vector
are called the payoff matrixes of the two players. A strategy vector  is an equilibrium if and only if the
is an equilibrium if and only if the  element in matrix
element in matrix  is the largest in its column, and in matrix
is the largest in its column, and in matrix  it is the largest in its row. In the case when
it is the largest in its row. In the case when  , the game is called zero-sum, and
, the game is called zero-sum, and  , so the game can be completely described by the payoff matrix
, so the game can be completely described by the payoff matrix  of the first player. In this special case a strategy vector
of the first player. In this special case a strategy vector  is an equilibrium if and only if the element
is an equilibrium if and only if the element  is the largest in its column and smallest in its row. In the zero-sum cases the equilibria are also called the saddle points
of the games. Clearly, the enumeration method to find equilibria
becomes more simple since we have to deal with a single matrix only.
is the largest in its column and smallest in its row. In the zero-sum cases the equilibria are also called the saddle points
of the games. Clearly, the enumeration method to find equilibria
becomes more simple since we have to deal with a single matrix only.
The simplified algorithm is as follows:
Equilibrium 
1FOR
TO2
DOFOR
TO3
DO4
FOR
TO5
DOIF6
THEN7 go to 12 8
FOR
TO9
DOIF10
THEN11 go to 12 12
IF13
THENRETURN()
Many finite games have the common feature that they can be represented by a finite directed tree with the following properties:
-
there is a unique root of the tree (which is not the endpoint of any arc), and the game starts at this node;
-
to each node of the tree a player is assigned and if the game reaches this node at any time, then this player will decide on the continuation of the game by selecting an arc originating from this node. Then the game moves to the endpoint of the chosen arc;
-
to each terminal node (in which no arc originates) an
 -dimensional real vector is assigned which gives the payoff values for the players if the game terminates at this node;
-dimensional real vector is assigned which gives the payoff values for the players if the game terminates at this node; -
each player knows the tree, the nodes he is assigned to, and all payoff values at the terminal nodes.
For example, the chess-game satisfies the above properties in which  ,
the nodes of the tree are all possible configurations on the chessboard
twice: once with the white player and once with the black player
assigned to it. The arcs represent all possible moves of the assigned
player from the originating configurations. The endpoints are those
configurations in which the game terminates. The payoff values are from
the set
,
the nodes of the tree are all possible configurations on the chessboard
twice: once with the white player and once with the black player
assigned to it. The arcs represent all possible moves of the assigned
player from the originating configurations. The endpoints are those
configurations in which the game terminates. The payoff values are from
the set  where
where  means win,
means win,  represents loss, and
represents loss, and  shows that the game ends with a tie.
shows that the game ends with a tie.
Theorem 10.1 All games represented by finite trees have at least one equilibrium.
Proof. We present the proof of this result here, since it suggests a practical algorithm to find equilibria. The proof goes by induction with respect to the number of nodes of the game tree. If the game has only one node, then clearly it is the only equilibrium.
Assume next that the theorem holds for any tree with less than  nodes (
nodes ( ), and consider a game
), and consider a game  with
with  nodes. Let
nodes. Let  be the root of the tree and let
be the root of the tree and let  (
( ) be the nodes connected to
) be the nodes connected to  by an arc. If
by an arc. If  denote the disjoint subtrees of
denote the disjoint subtrees of  with roots
with roots  , then each subtree has less than
, then each subtree has less than  nodes, so each of them has an equilibrium. Assume that player
nodes, so each of them has an equilibrium. Assume that player  is assigned to
is assigned to  . Let
. Let  be the equilibrium payoffs of player
be the equilibrium payoffs of player  on the subtrees
on the subtrees  and let
and let  . Then player
. Then player  will move to node
will move to node  from the root, and then the equilibrium continues with the equilibrium obtained on the subtree
from the root, and then the equilibrium continues with the equilibrium obtained on the subtree  .
We note that not all equilibria can be obtained by this method, however
the payoff vectors of all equilibria, which can obtained by this
method, are identical.
.
We note that not all equilibria can be obtained by this method, however
the payoff vectors of all equilibria, which can obtained by this
method, are identical.
We note that not all equilibria can be obtained by this method, however the payoff vectors of all equilibria, which can be obtained by this method, are identical.
The proof of the theorem suggests a dynamic programming-type algorithm which is called backward induction. It can be extended to the more general case when the tree has chance nodes from which the continuations of the game are random according to given discrete distributions.
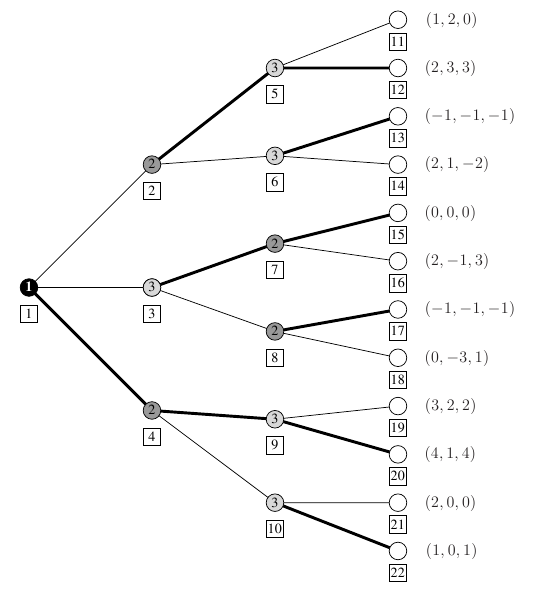
The solution algorithm can be formally presented as follows. Assume that the nodes are numbered so each arc connects nodes  and
and  only for
only for  . The root has to get the smallest number
. The root has to get the smallest number  , and the largest number
, and the largest number  is given to one of the terminal nodes. For each node
is given to one of the terminal nodes. For each node  let
let  denote the set of all nodes
denote the set of all nodes  such that there is an arc from
such that there is an arc from  to
to  . For each terminal node
. For each terminal node  ,
,  is empty, and let
is empty, and let  denote the payoff vector associated to this node. And finally we will denote player assigned to node
denote the payoff vector associated to this node. And finally we will denote player assigned to node  by
by  for all
for all  . The algorithm starts at the last node
. The algorithm starts at the last node  and moves backward in the order
and moves backward in the order  and
and  . Node
. Node  is an endpoint, so vector
is an endpoint, so vector  has been already assigned. If in the process the next node
has been already assigned. If in the process the next node  is an endpoint, then
is an endpoint, then  is already given, otherwise we find the largest among the values
is already given, otherwise we find the largest among the values  ,
,  . Assume that the maximal value occurs at node
. Assume that the maximal value occurs at node  , then we assign
, then we assign  to node
to node  , and move to node
, and move to node  . After all payoff vectors
. After all payoff vectors  and
and  are determined, then vector
are determined, then vector  gives the equilibrium payoffs and the equilibrium path is obtained by nodes:
gives the equilibrium payoffs and the equilibrium path is obtained by nodes:

until an endpoint is reached, when the equilibrium path terminates.
At each node the number of comparisons equals the number of arcs starting at that node minus  . Therefore the total number of comparisons in the algorithm is the total number of arcs minus the number of nodes.
. Therefore the total number of comparisons in the algorithm is the total number of arcs minus the number of nodes.
This algorithm can be formally given as follows:
Backward-Induction
1FOR
TO2
DO3
4 print sequence
until an endpoint is reached
Example 10.3 Figure 10.3 shows a finite tree. In the circle at each nonterminal node we indicate the player assigned to that node. The payoff vectors are also shown at all terminal nodes. We have three players, so the payoff vectors have three elements.
First we number the nodes such that the beginning of each arc has a
smaller number than its endpoint. We indicated these numbers in a box
under each node. All nodes  for
for  are terminal nodes, as we start the backward induction with node
are terminal nodes, as we start the backward induction with node  . Since player
. Since player  is assigned to this node we have to compare the third components of the payoff vectors
is assigned to this node we have to compare the third components of the payoff vectors  and
and  associated to the endpoints of the two arcs originating from node
associated to the endpoints of the two arcs originating from node  . Since
. Since  , player
, player  will select the arc to node
will select the arc to node  as his best choice. Hence
as his best choice. Hence  , and
, and  . Then we check node
. Then we check node  . By comparing the third components of vectors
. By comparing the third components of vectors  and
and  it is clear that player
it is clear that player  will select node
will select node  , so
, so  , and
, and  .
In the graph we also indicated the choices of the players by thicker
arcs. Continuing the procedure in the same way for nodes
.
In the graph we also indicated the choices of the players by thicker
arcs. Continuing the procedure in the same way for nodes  we finally obtain the payoff vector
we finally obtain the payoff vector  and equilibrium path
and equilibrium path  .
.
Exercises
10.1-1 An entrepreneur (E) enters to a market, which is controlled by a chain store (C). Their competition is a two-person game. The strategies of the chain store are soft (S), when it allows the competitor to operate or tough (T), when it tries to drive out the competitor. The strategies of the entrepreneur are staying in (I) or leaving (L) the market. The payoff tables of the two player are assumed to be

Find the equilibrium.
10.1-2 A salesman sells an
equipment to a buyer, which has 3 parts, under the following
conditions. If all parts are good, then the customer pays $  to the salesman, otherwise the salesman has to pay $
to the salesman, otherwise the salesman has to pay $  to the customer. Before selling the equipment, the salesman is able to
check any one or more of the parts, but checking any one costs him $
to the customer. Before selling the equipment, the salesman is able to
check any one or more of the parts, but checking any one costs him $  . Consider a two-person game in which player
. Consider a two-person game in which player  is the salesman with strategies
is the salesman with strategies  (how many parts he checks before selling the equipment), and player
(how many parts he checks before selling the equipment), and player  is the equipment with strategies
is the equipment with strategies  (how many parts are defective). Show that the payoff matrix of player
(how many parts are defective). Show that the payoff matrix of player  is given as below when we assume that the different parts can be defective with equal probability.
is given as below when we assume that the different parts can be defective with equal probability.
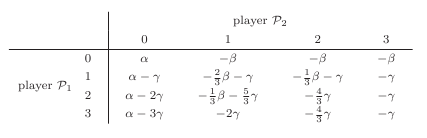
10.1-3 Assume that in the
previous problem the payoff of the second player is the negative of the
payoff of the salesman. Give a complete description of the number of
equilibria as a function of the parameter values  . Determine the equilibria in all cases.
. Determine the equilibria in all cases.
10.1-4 Assume that the payoff function of the equipment is its value ( if all parts are good, and zero otherwise) in the previous exercise. Is there an equilibrium point?
if all parts are good, and zero otherwise) in the previous exercise. Is there an equilibrium point?
10.1-5 Exercise 10.1-1 can be represented by the tree shown in Figure 10.4.
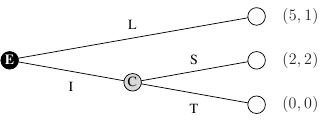
Find the equilibrium with backward induction.
10.1-6 Show that in the one-player case backward induction reduces to the classical dynamic programming method.
10.1-7 Assume that in the tree of a game some nodes are so called “chance nodes” from which the game continuous with given probabilities assigned to the possible next nodes. Show the existence of the equilibrium for this more general case.
10.1-8 Consider the tree given in Figure 10.3, and double the payoff values of player  , change the sign of the payoff values of player
, change the sign of the payoff values of player  , and do not change those for Player
, and do not change those for Player  . Find the equilibrium of this new game.
. Find the equilibrium of this new game.
If the strategy sets  are connected subsets of finite dimensional Euclidean Spaces and the
payoff functions are continuous, then the game is considered continuous.
are connected subsets of finite dimensional Euclidean Spaces and the
payoff functions are continuous, then the game is considered continuous.
It is very intuitive and usefull from algorithmic point of view to
reformulate the equilibrium concept as follows. For all players  and
and  define the mapping:
define the mapping:

which is the set of the best choices of player  with given strategies
with given strategies  ,
,  of the other players. Note that
of the other players. Note that  does not depend on
does not depend on  , it depends only on all other strategies
, it depends only on all other strategies  ,
,  . There is no guarantee that maximum exists for all
. There is no guarantee that maximum exists for all  . Let
. Let  be the subset of
be the subset of  such that
such that  exists for all
exists for all  and
and  . A simultaneous strategy vector
. A simultaneous strategy vector  is an equilibrium if and only if
is an equilibrium if and only if  , and
, and  for all
for all  . By introducing the best reply mapping,
. By introducing the best reply mapping,  we can further simplify the above reformulation:
we can further simplify the above reformulation:
Theorem 10.2 Vector  is equilibrium if and only if
is equilibrium if and only if  and
and  .
.
Hence we have shown that the equilibrium-problem of  -person games is equivalent to find fixed points of certain point-to-set mappings.
-person games is equivalent to find fixed points of certain point-to-set mappings.
The most frequently used existence theorems of equilibria are based on fixed point theorems such as the theorems of Brouwer, Kakutani, Banach, Tarski etc. Any algorithm for finding fixed points can be successfully applied for computing equilibria.
The most popular existence result is a straightforward application of the Kakutani-fixed point theorem.
Theorem 10.3 Assume that in an  -person game
-person game
1. the strategy sets  are nonempty, closed, bounded, convex subsets of finite dimensional Euclidean spaces;
are nonempty, closed, bounded, convex subsets of finite dimensional Euclidean spaces;
for all  ,
,
2. the payoff function  are continuous on
are continuous on  ;
;
3.  is concave in
is concave in  with all fixed
with all fixed  .
.
Then there is at least one equilibrium.
Example 10.4 Consider a 2-person game,  , with strategy sets
, with strategy sets  , and payoff functions
, and payoff functions  , and
, and  .
We will first find the best responses of both players. Both payoff
functions are concave parabolas in their variables with vertices
.
We will first find the best responses of both players. Both payoff
functions are concave parabolas in their variables with vertices

For all  and
and  these values are clearly feasible strategies, so
these values are clearly feasible strategies, so

So  is equilibrium if and only if it satisfies equations:
is equilibrium if and only if it satisfies equations:

It is easy to see that the unique solution is
which is therefore the unique equilibrium of the game.
Example 10.5 Consider a portion of a sea-channel, assume it is the unit interval  . Player
. Player  is a submarine hiding in location
is a submarine hiding in location  , player
, player  is an airplane dropping a bomb at certain location
is an airplane dropping a bomb at certain location  resulting in a damage
resulting in a damage  to the submarine. Hence a special two-person game is defined in which
to the submarine. Hence a special two-person game is defined in which  ,
,  and
and  . With fixed
. With fixed  ,
,  is maximal if
is maximal if  , therefore the best response of player
, therefore the best response of player  is
is  . Player
. Player  wants to minimize
wants to minimize  which occurs if
which occurs if  is as large as possible, which implies that
is as large as possible, which implies that
Clearly, there is no  such that
such that  and
and  , consequently no equilibrium exists.
, consequently no equilibrium exists.
Define the aggregation function  as:
as:

for all  and
and  from
from  and some
and some 
Theorem 10.4 Vector  is an equilibrium if and only if
is an equilibrium if and only if

for all  .
.
Proof. Assume first that  is an equilibrium, then inequality (10.1) holds for all
is an equilibrium, then inequality (10.1) holds for all  and
and  . Adding the
. Adding the  -multiples of these relations for
-multiples of these relations for  we immediately have (10.5).
we immediately have (10.5).
Assume next that (10.5) holds for all  . Select any
. Select any  and
and  , define
, define  , and apply inequality (10.5). All but the
, and apply inequality (10.5). All but the  -th terms cancel and the remaining term shows that inequality (10.1) holds. Hence
-th terms cancel and the remaining term shows that inequality (10.1) holds. Hence  is an equilibrium.
is an equilibrium.
Introduce function  , then clearly
, then clearly  is an equilibrium if and only if
is an equilibrium if and only if

Relation (10.6) is known as Fan's inequality.
It can be rewritten as a variational inequality (see in “Iterative
computation of equilibrium.” later), or as a fixed point problem. We
show here the second approach. For all  define
define

Since  for all
for all  , relation (10.6) holds if and only if
, relation (10.6) holds if and only if  , that is
, that is  is a fixed-point of mapping
is a fixed-point of mapping  . Therefore any method to find fixed point is applicable for computing equilibria.
. Therefore any method to find fixed point is applicable for computing equilibria.
The computation cost depends on the type and size of the fixed point problem and also on the selected method.
Example 10.6 Consider again the problem of Example 10.4. In this case


so the aggregate function has the form with  :
:

Therefore

and

Notice that this function is strictly concave in  and
and  , and is separable in these variables. At the stationary points:
, and is separable in these variables. At the stationary points:
implying that at the optimum

since both right hand sides are feasible. At the fixed point

giving the unique solution:
Assume that for all 

where  is a vector variable vector valued function which is continuously differentiable in an open set
is a vector variable vector valued function which is continuously differentiable in an open set  containing
containing  . Assume furthermore that for all
. Assume furthermore that for all  , the payoff function
, the payoff function  is continuously differentiable in
is continuously differentiable in  on
on  with any fixed
with any fixed  .
.
If  is an equilibrium, then for all
is an equilibrium, then for all  ,
,  is the optimal solution of problem:
is the optimal solution of problem:

By assuming that at  the Kuhn-Tucker regularity condition is satisfied, the solution has to satisfy the Kuhn-Tucker necessary condition:
the Kuhn-Tucker regularity condition is satisfied, the solution has to satisfy the Kuhn-Tucker necessary condition:

where  is an
is an  -element column vector,
-element column vector,  is its transpose,
is its transpose,  is the gradient of
is the gradient of  (as a row vector) with respect to
(as a row vector) with respect to  and
and  is the Jacobian of function
is the Jacobian of function  .
.
Theorem 10.5 If  is an equilibrium, then there are vectors
is an equilibrium, then there are vectors  such that relations (10.9) are satisfied.
such that relations (10.9) are satisfied.
Relations (10.9) for  give a (usually large) system of equations and inequalities for the unknowns
give a (usually large) system of equations and inequalities for the unknowns  and
and  (
( ). Any equilibrium (if exists) has to be among the solutions. If in addition for all
). Any equilibrium (if exists) has to be among the solutions. If in addition for all  , all components of
, all components of  are concave, and
are concave, and  is concave in
is concave in  , then the Kuhn-Tucker conditions are also sufficient, and therefore all solutions of (10.9) are equilibria.
, then the Kuhn-Tucker conditions are also sufficient, and therefore all solutions of (10.9) are equilibria.
The computation cost in solving system (10.9) depends on its type and the chosen method.
Example 10.7 Consider again the two-person game of the previous example. Clearly,


so we have

Simple differentiation shows that


therefore the Kuhn-Tucker conditions can be written as follows:

Notice that  is concave in
is concave in  ,
,  is concave in
is concave in  ,
and all constraints are linear, therefore all solutions of this
equality-inequality system are really equilibria. By systematically
examining the combination of cases
,
and all constraints are linear, therefore all solutions of this
equality-inequality system are really equilibria. By systematically
examining the combination of cases

and

it is easy to see that there is a unique solution

By introducing slack and surplus variables the Kuhn-Tucker conditions can be rewritten as a system of equations with some nonnegative variables. The nonnegativity conditions can be formally eliminated by considering them as squares of some new variables, so the result becomes a system of (usually) nonlinear equations without additional constraints. There is a large set of numerical methods for solving such systems.
Assume that all conditions of the previous section hold. Consider the following optimization problem:

The two first constraints imply that the objective function is nonnegative, so is the minimal value of it. Therefore system (10.9) has feasible solution if and only if the optimal value of the objective function of problem (10.10) is zero, and in this case any optimal solution satisfies relations (10.9).
Theorem 10.6 The  -person
game has equilibrium only if the optimal value of the objective
function is zero. Then any equilibrium is optimal solution of problem (10.10). If in addition all components of
-person
game has equilibrium only if the optimal value of the objective
function is zero. Then any equilibrium is optimal solution of problem (10.10). If in addition all components of  are concave and
are concave and  is concave in
is concave in  for all
for all  , then any optimal solution of problem (10.10) is equilibrium.
, then any optimal solution of problem (10.10) is equilibrium.
Hence the equilibrium problem of the  -person
game has been reduced to finding the optimal solutions of this (usually
nonlinear) optimization problem. Any nonlinear programming method can
be used to solve the problem.
-person
game has been reduced to finding the optimal solutions of this (usually
nonlinear) optimization problem. Any nonlinear programming method can
be used to solve the problem.
The computation cost in solving the optimization problem (10.10) depends on its type and the chosen method. For example, if (10.10) is an LP, and solved by the simplex method, then the maximum number of operations is exponential. However in particular cases the procedure terminates with much less operations.
Example 10.8 In the case of the previous problem the optimization problem has the following form:
Notice that the solution  ,
,  and
and  is feasible with zero objective function value, so it is also optimal. Hence it is a solution of system (10.9) and consequently an equilibrium.
is feasible with zero objective function value, so it is also optimal. Hence it is a solution of system (10.9) and consequently an equilibrium.
We have seen earlier that a finite game does not necessary have equilibrium. Even if it does, in the case of repeating the game many times the players wish to introduce some randomness into their actions in order to make the other players confused and to seek an equilibrium in the stochastic sense. This idea can be modeled by introducing probability distributions as the strategies of the players and the expected payoff values as their new payoff functions.
Keeping the notation of Section 10.1 assume that we have  players, the finite strategy set of player
players, the finite strategy set of player  is
is  .
In the mixed extension of this finite game each player selects a
discrete probability distribution on its strategy set and in each
realization of the game an element of
.
In the mixed extension of this finite game each player selects a
discrete probability distribution on its strategy set and in each
realization of the game an element of  is chosen according to the selected distribution. Hence the new strategy set of player
is chosen according to the selected distribution. Hence the new strategy set of player  is
is

which is the set of all  -element probability vectors. The new payoff function of this player is the expected value:
-element probability vectors. The new payoff function of this player is the expected value:


Notice that the original “pure” strategies  can be obtained by selecting
can be obtained by selecting  as the
as the  -th basis vector. This is a continuous game and as a consequence of Theorem 10.3
it has at least one equilibrium. Hence if a finite game is without an
equilibrium, its mixed extension has always at least one equilibrium,
which can be obtained by using the methods outlined in the previous
sections.
-th basis vector. This is a continuous game and as a consequence of Theorem 10.3
it has at least one equilibrium. Hence if a finite game is without an
equilibrium, its mixed extension has always at least one equilibrium,
which can be obtained by using the methods outlined in the previous
sections.
Example 10.9 Consider the two-person case in which  , and as in section 10.1 introduce matrices
, and as in section 10.1 introduce matrices  and
and  with
with  elements
elements  and
and  . In this special case
. In this special case

The constraints of  can be rewritten as:
can be rewritten as:
so we may select
The optimization problem (10.10) now reduces to the following:

where  ,
,  and
and  ,
,  .
.
Notice this is a quadratic optimization problem. Computation cost depends on the selected method. Observe that the problem is usually nonconvex, so there is the possibility of stopping at a local optimum.
Mixed extensions of two-person finite games are called bimatrix games. They were already examined in Example 10.9. For notational convenience introduce the simplifying notation:

We will show that problem (10.15) can be rewritten as quadratic programming problem with linear constraints.
Consider the objective function first. Let

then the objective function can be rewritten as follows:

The last two constraints also simplify:
implying that

so we may rewrite the objective function again:


since

Hence we have the following quadratic programming problem:
where the last two conditions are obtained from (10.17) and the nonnegativity of vectors  ,
,  .
.
Theorem 10.7 Vectors  and
and  are equilibria of the bimatrix game if and only if with some
are equilibria of the bimatrix game if and only if with some  and
and  ,
,  is optimal solution of problem (10.18). The optimal value of the objective function is zero.
is optimal solution of problem (10.18). The optimal value of the objective function is zero.
This is a quadratic programming problem. Computation cost depends on the selected method. Since it is usually nonconvex, the algorithm might terminate at local optimum. We know that at the global optimum the objective function must be zero, which can be used for optimality check.
and
Then
so problem (10.18) has the form:
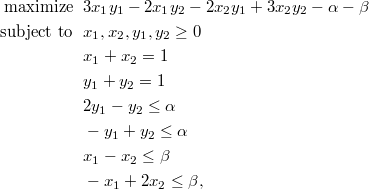
where  and
and  . We also know from Theorem 10.7
that the optimal objective function value is zero, therefore any
feasible solution with zero objective function value is necessarily
optimal. It is easy to see that the solutions
. We also know from Theorem 10.7
that the optimal objective function value is zero, therefore any
feasible solution with zero objective function value is necessarily
optimal. It is easy to see that the solutions

are all optimal, so they provide equilibria.
One might apply relations (10.9) to find equilibria by solving the equality-inequality system instead of solving an optimization problem. In the case of bimatrix games problem (10.9) simplifies as

which can be proved along the lines of the derivation of the quadratic optimization problem.
The computation cost of the solution of system (10.19) depends on the particular method being selected.
Example 10.11 Consider again the bimatrix game of the previous example. Substitute the first and second constraints  and
and  into the third and fourth condition to have
into the third and fourth condition to have
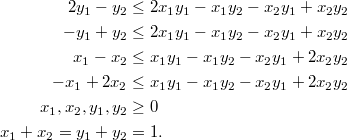
It is easy to see that the solutions given in the previous example solve this system, so they are equilibria.
We can also rewrite the equilibrium problem of bimatrix games as an
equality-inequality system with mixed variables. Assume first that all
elements of  and
and  are between
are between  and
and  . This condition is not really restrictive, since by using linear transformations
. This condition is not really restrictive, since by using linear transformations

where  , and
, and  is the matrix all elements of which equal
is the matrix all elements of which equal  , the equilibria remain the same and all matrix elements can be transformed into interval
, the equilibria remain the same and all matrix elements can be transformed into interval  .
.
Theorem 10.8 Vectors  ,
,  are an equilibrium if and only if there are real numbers
are an equilibrium if and only if there are real numbers  and zero-one vectors
and zero-one vectors  , and
, and  such that
such that

where  denotes the vector with all unit elements.
denotes the vector with all unit elements.
Proof. Assume first that  ,
,  is an equilibrium, then with some
is an equilibrium, then with some  and
and  , (10.19) is satisfied. Define
, (10.19) is satisfied. Define

Since all elements of  and
and  are between
are between  and
and  , the values
, the values  and
and  are also between
are also between  and
and  . Notice that
. Notice that

which implies that (10.20) holds.
Assume next that (10.20) is satisfied. Then

If  , then
, then  , (where
, (where  is the
is the  -th basis vector), and if
-th basis vector), and if  , then
, then  . Therefore
. Therefore

implying that  . We can similarly show that
. We can similarly show that  . Thus (10.19) is satisfied, so,
. Thus (10.19) is satisfied, so,  is an equilibrium.
is an equilibrium.
The computation cost of the solution of system (10.20) depends on the particular method being seleced.
Example 10.12 In the case of the bimatrix game introduced earlier in Example 10.10 we have the following:
Notice that all three solutions given in Example 10.10 satisfy these relations with


and

respectively.
In the special case of  , bimatrix games are called matrix games and they are represented by matrix
, bimatrix games are called matrix games and they are represented by matrix  . Sometimes we refer to the game as matrix
. Sometimes we refer to the game as matrix  game. Since
game. Since  , the quadratic optimization problem (10.18) becomes linear:
, the quadratic optimization problem (10.18) becomes linear:

From this formulation we see that the set of the equilibrium strategies is a convex polyhedron. Notice that variables  and
and  can be separated, so we have the following result.
can be separated, so we have the following result.
Theorem 10.9 Vectors  and
and  give an equilibrium of the matrix game if and only if with some
give an equilibrium of the matrix game if and only if with some  and
and  ,
,  and
and  are optimal solutions of the linear programming problems:
are optimal solutions of the linear programming problems:

Notice that at the optimum,  . The optimal
. The optimal  value is called the value of the matrix game.
value is called the value of the matrix game.
Solving problem 10.22 requires exponential number of operations if the simplex method is chosen. With polynomial algorithm (such as the interior point method) the number of operations is only polynomial.
Example 10.13 Consider the matrix game with matrix:
In this case problems 10.22 have the form:

The application of the simplex method shows that the optimal solutions are  ,
,  ,
,  , and
, and  .
.
We can also obtain the equilibrium by finding feasible solutions of
a certain set of linear constraints. Since at the optimum of problem (10.21),  , vectors
, vectors  ,
,  and scalers
and scalers  and
and  are optimal solutions if and only if
are optimal solutions if and only if

The first phase of the simplex method has to be used to solve system (10.23), where the number of operations might be experimental. However in most practical examples much less operations are needed.
Example 10.14 Consider again the matrix game of the previous example. In this case system (10.23) has the following form:
It is easy to see that  ,
,  ,
,  satisfy these relations, so
satisfy these relations, so  ,
,  is an equilibrium.
is an equilibrium.
Consider now a matrix game with matrix  .
The main idea of this method is that at each step both players
determine their best pure strategy choices against the average
strategies of the other player of all previous steps. Formally the
method can be described as follows.
.
The main idea of this method is that at each step both players
determine their best pure strategy choices against the average
strategies of the other player of all previous steps. Formally the
method can be described as follows.
Let  be the initial (mixed) strategy of player
be the initial (mixed) strategy of player  . Select
. Select  (the
(the  st basis vector) such that
st basis vector) such that

In any further step  , let
, let

and select  so that
so that

Let then

and select  so that
so that

By repeating the general step for  two sequences are generated:
two sequences are generated:  , and
, and  . We have the following result:
. We have the following result:
Theorem 10.10 Any cluster point of these sequences is an equilibrium of the matrix game. Since all  and
and  are probability vectors, they are bounded. Therefore there is at least one cluster point.
are probability vectors, they are bounded. Therefore there is at least one cluster point.
Assume, matrix  is
is  . In (10.24) we need
. In (10.24) we need  multiplications. In (10.25) and (10.27)
multiplications. In (10.25) and (10.27)  multiplications and divisions. In (10.26) and (10.28)
multiplications and divisions. In (10.26) and (10.28)  multiplications. If we make
multiplications. If we make  iteration steps, then the total number of multiplications and divisions is:
iteration steps, then the total number of multiplications and divisions is:

The formal algorithm is as follows:
Matrix-Equilibrium(
)
12 define
such that
3
4
5
6 define
such that
7
8
9 define
such that
10
11
IFand
12
THENis equilibrium 13
ELSEgo back to 4
Here  is a user selected error tolerance.
is a user selected error tolerance.
Example 10.15 We applied the above method for the matrix game of the previous example and started the procedure with  . After 100 steps we obtained
. After 100 steps we obtained  and
and  . Comparing it to the true values of the equilibrium strategies we see that the error is below
. Comparing it to the true values of the equilibrium strategies we see that the error is below  , showing the very slow convergence of the method.
, showing the very slow convergence of the method.
A matrix game with skew-symmetric matrix is called symmetric. In this case  and the two linear programming problems are identical. Therefore at the optimum
and the two linear programming problems are identical. Therefore at the optimum  , and the equilibrium strategies of the two players are the same. Hence we have the following result:
, and the equilibrium strategies of the two players are the same. Hence we have the following result:
Theorem 10.11 A vector  is equilibrium of the symmetric matrix game if and only if
is equilibrium of the symmetric matrix game if and only if

Solving system (10.29) the first phase of the simplex method is needed, the number of operations is exponential in the worst case but in practical case usually much less.
Example 10.16 Consider the symmetric matrix game with matrix  . In this case relations (10.29) simplify as follows:
. In this case relations (10.29) simplify as follows:

Clearly the only solution is  and
and  , that is the first pure strategy.
, that is the first pure strategy.
We will see in the next subsection that linear programming problems are equivalent to symmetric matrix games so any method for solving such games can be applied to solve linear programming problems, so they serve as alternative methodology to the simplex method. As we will see next, symmetry is not a strong assumption, since any matrix game is equivalent to a symmetric matrix game.
Consider therefore a matrix game with matrix  , and construct the skew-symmetric matrix
, and construct the skew-symmetric matrix
where all components of vector  equal 1. Matrix games
equal 1. Matrix games  and
and  are equivalent in the following sense. Assume that
are equivalent in the following sense. Assume that  , which is not a restriction, since by adding the same constant to all element of
, which is not a restriction, since by adding the same constant to all element of  they become positive without changing equilibria.
they become positive without changing equilibria.
1. If  is an equilibrium strategy of matrix game
is an equilibrium strategy of matrix game  then with
then with  ,
,  and
and  is an equilibrium of matrix game
is an equilibrium of matrix game  with value
with value  ;
;
2. If  is an equilibrium of matrix game
is an equilibrium of matrix game  and
and  is the value of the game, then
is the value of the game, then
is equilibrium strategy of matrix game  .
.
Proof. Assume first that  is an equilibrium strategy of game
is an equilibrium strategy of game  , then
, then  ,
,  ,
,  , so
, so

First we show that  , that is
, that is  . If
. If  , then (since
, then (since  is a probability vector)
is a probability vector)  and
and  , contradicting the second inequality of (10.30). If
, contradicting the second inequality of (10.30). If  , then
, then  , and by the third inequality of (10.30),
, and by the third inequality of (10.30),  must have at least one positive component which makes the first inequality impossible.
must have at least one positive component which makes the first inequality impossible.
Next we show that  . From (10.30) we have
. From (10.30) we have
and by adding these inequalities we see that

and combining this relation with the third inequality of (10.30) we see that  .
.
Select  , then
, then  , so both
, so both  , and
, and  are probability vectors, furthermore from (10.30),
are probability vectors, furthermore from (10.30),

So by selecting  and
and  ,
,  and
and  are feasible solutions of the pair (10.22) of linear programming problems with
are feasible solutions of the pair (10.22) of linear programming problems with  , therefore
, therefore  is an equilibrium of matrix game
is an equilibrium of matrix game  . Part 2. can be proved in a similar way, the details are not given here.
. Part 2. can be proved in a similar way, the details are not given here.
In this section we will show that linear programming problems can be solved by finding the equilibrium strategies of symmetric matrix games and hence, any method for finding the equilibria of symmetric matrix games can be applied instead of the simplex method.
Consider the primal-dual linear programming problem pair:

Construct the skew-symmetric matrix:
Theorem 10.13 Assume  is an equilibrium strategy of the symmetric matrix game
is an equilibrium strategy of the symmetric matrix game  with
with  . Then
. Then
are optimal solutions of the primal and dual problems, respectively.
Proof. If  is an equilibrium strategy, then
is an equilibrium strategy, then  , that is,
, that is,

Since  and
and  , both vectors
, both vectors  , and
, and  are nonnegative, and by dividing the first two relations of (10.32) by
are nonnegative, and by dividing the first two relations of (10.32) by  ,
,

showing that  and
and  are feasible for the primal and dual, respectively. From the last condition of (10.32) we have
are feasible for the primal and dual, respectively. From the last condition of (10.32) we have

However

consequently,  , showing that the primal and dual objective functions are equal. The duality theorem implies the optimality of
, showing that the primal and dual objective functions are equal. The duality theorem implies the optimality of  and
and  .
.
Example 10.17 Consider the linear programming problem:
First we have to rewrite the problem as a primal problem. Introduce the new variables:
and multiply the  -type constraint by
-type constraint by  . Then the problem becomes the following:
. Then the problem becomes the following:
Hence

and so matrix  becomes:
becomes:
The fictitious play method is an iteration algorithm in which at each step the players adjust their strategies based on the opponent's strategies. This method can therefore be considered as the realization of a discrete system where the strategy selections of the players are the state variables. For symmetric matrix games John von Neumann introduced a continuous systems approach when the players continuously adjust their strategies. This method can be applied to general matrix games, since–as we have seen earlier–any matrix game is equivalent to a symmetric matrix game. The method can also be used to solve linear programming problems as we have seen earlier that any primal-dual pair can be reduced to the solution of a symmetric matrix game.
Let now  be a skew-symmetric
be a skew-symmetric  matrix. The strategy of player
matrix. The strategy of player  ,
,  is considered as the function of time
is considered as the function of time  . Before formulating the dynamism of the system, introduce the following notation:
. Before formulating the dynamism of the system, introduce the following notation:

For arbitrary probability vector  solve the following nonlinear initial-value problem:
solve the following nonlinear initial-value problem:

Since
the right-hand side is continuous, there is at least one solution. The
right hand side of the equation can be interpreted as follows. Assume
that  . If player
. If player  selects strategy
selects strategy  , then player
, then player  is able to obtain a positive payoff by choosing the pure strategy
is able to obtain a positive payoff by choosing the pure strategy  , which results in a negative payoff for player
, which results in a negative payoff for player  . However if player
. However if player  increases
increases  to one by choosing the same strategy
to one by choosing the same strategy  its payoff
its payoff  becomes zero, so it increases. Hence it is the interest of player
becomes zero, so it increases. Hence it is the interest of player  to increase
to increase  . This is exactly what the first term represents. The second term is needed to ensure that
. This is exactly what the first term represents. The second term is needed to ensure that  remains a probability vector for all
remains a probability vector for all  .
.
The computation of the right hand side of equations (10.34) for all  requires
requires  multiplications. The total computation cost depends on the length of
solution interval, on the selected step size, and on the choice of the
differential equation solver.
multiplications. The total computation cost depends on the length of
solution interval, on the selected step size, and on the choice of the
differential equation solver.
Theorem 10.14 Assume that  is a positive strictly increasing sequence converging to
is a positive strictly increasing sequence converging to  , then any cluster point of the sequence
, then any cluster point of the sequence  is equilibrium strategy, furthermore there is a constant
is equilibrium strategy, furthermore there is a constant  such that
such that

Proof. First we have to show that  is a probability vector for all
is a probability vector for all  . Assume that with some
. Assume that with some  and
and  ,
,  . Define
. Define

Since  is continuous and
is continuous and  , clearly
, clearly  , and for all
, and for all  ,
,  . Then for all
. Then for all  ,
,

and the Lagrange mean-value theorem implies that with some  ,
,

which is a contradiction. Hence  is nonnegative. Next we show that
is nonnegative. Next we show that  for all
for all  . Let
. Let  , then
, then

so  satisfies the homogeneous equation
satisfies the homogeneous equation

with the initial condition  . Hence for all
. Hence for all  ,
,  , showing that
, showing that  is a probability vector.
is a probability vector.
Assume that for some  ,
,  . Then
. Then

By multiplying both sides by  and adding the resulted equations for
and adding the resulted equations for  we have:
we have:

The first term is zero, since  is skew-symmetric. Notice that this equation remains valid even as
is skew-symmetric. Notice that this equation remains valid even as  except the break-points (where the derivative of
except the break-points (where the derivative of  does not exist) since (10.36) remains true.
does not exist) since (10.36) remains true.
Assume next that with a positive  ,
,  . Then for all
. Then for all  ,
,  . Since equation (10.37) can be rewritten as
. Since equation (10.37) can be rewritten as

with

we see that  satisfies a homogeneous equation with zero initial solution at
satisfies a homogeneous equation with zero initial solution at  , so the solution remains zero for all
, so the solution remains zero for all  . Therefore
. Therefore  showing that
showing that  , that is,
, that is,  is equilibrium strategy.
is equilibrium strategy.
If  for all
for all  , then
, then  , and clearly
, and clearly

that is

Integrate both sides in interval  to have
to have

with  , which implies that
, which implies that

By using the Cauchy–Schwartz inequality we get

which is valid even at the break points because of the continuity of functions  . And finally, take a sequence
. And finally, take a sequence  with
with  increasingly converging to
increasingly converging to  . The sequence is bounded (being probability vectors), so there is at least one cluster point
. The sequence is bounded (being probability vectors), so there is at least one cluster point  . From (10.40), by letting
. From (10.40), by letting  we have that
we have that  showing that
showing that  is an equilibrium strategy.
is an equilibrium strategy.
Example 10.18 Consider the matrix game with matrix
which was the subject of our earlier Example 10.13 In order to apply the method of von Neumann we have to find first an equivalent symmetric matrix game. The application of the method given in Theorem 10.12. requires that the matrix has to be positive. Without changing the equilibria we can add 2 to all matrix elements to have
and by using the method we get the skew-symmetric matrix
The differential equations (10.34) were solved by using the  th order Runge–Kutta method in the interval
th order Runge–Kutta method in the interval  with the step size
with the step size  and initial vector
and initial vector  . From
. From  we get the approximations
we get the approximations


of the equilibrium strategies of the original game. Comparing these values to the exact values:

we see that the maximum error is about  .
.
Consider an  -person continuous game and assume that all conditions presented at the beginning of Subsection 10.2.3 are satisfied. In addition, assume that for all
-person continuous game and assume that all conditions presented at the beginning of Subsection 10.2.3 are satisfied. In addition, assume that for all  ,
,  is bounded, all components of
is bounded, all components of  are concave and
are concave and  is concave in
is concave in  with any fixed
with any fixed  . Under these conditions there is at least one equilibrium (Theorem 10.3). The uniqueness of the equilibrium is not true in general, even if all
. Under these conditions there is at least one equilibrium (Theorem 10.3). The uniqueness of the equilibrium is not true in general, even if all  are strictly concave in
are strictly concave in  . Such an example is shown next.
. Such an example is shown next.
Example 10.19 Consider a two-person game with  and
and  . Clearly both payoff functions are strictly concave and there are infinitely many equilibria:
. Clearly both payoff functions are strictly concave and there are infinitely many equilibria:  .
.
Select an arbitrary nonnegative vector  and define function
and define function

where  , and
, and  is the gradient (as a row vector) of
is the gradient (as a row vector) of  with respect to
with respect to  . The game is said to be diagonally strictly concave if for all
. The game is said to be diagonally strictly concave if for all  ,
,  and for some
and for some  ,
,

Theorem 10.15 Under the above conditions the game has exactly one equilibrium.
Proof. The existence of the equilibrium follows from Theorem 10.3. In proving uniqueness assume that  and
and  are both equilibria, and both satisfy relations (10.9). Therefore for
are both equilibria, and both satisfy relations (10.9). Therefore for  ,
,
and the second equation can be rewritten as

where  and
and  are the
are the  th components of
th components of  and
and  , respectively. Multiplying (10.43) by
, respectively. Multiplying (10.43) by  for
for  and by
and by  for
for  and adding the resulted equalities for
and adding the resulted equalities for  we have
we have

Notice
that the sum of the first two terms is positive by the diagonally
strict concavity of the game, the concavity of the components of  implies that
implies that

and

Therefore from (10.44) we have
where we used the fact that for all  and
and  ,
,

This is an obvious contradiction, which completes the proof.
In practical cases the following result is very useful in checking diagonally strict concavity of  -person games.
-person games.
Theorem 10.16 Assume  is convex,
is convex,  is twice continuously differentiable for all
is twice continuously differentiable for all  , and
, and  is negative definite with some
is negative definite with some  , where
, where  is the Jacobian of
is the Jacobian of  . Then the game is diagonally strictly concave.
. Then the game is diagonally strictly concave.
Proof. Let  ,
,  . Then for all
. Then for all  ,
,  and
and

Integrate both side in  to have
to have

and by premultiplying both sides by  we see that
we see that

completing the proof.
Example 10.20 Consider a simple two-person game with strategy sets  , and payoff functions
, and payoff functions

and

Clearly all conditions, except diagonally strict concavity, are satisfied. We will use Theorem 10.16 to show this additional property. In this case

so

with Jacobian
We will show that

is negative definite with some  . For example, select
. For example, select  , then this matrix becomes
, then this matrix becomes

with characteristic polynomial

having negative eigenvalues  ,
,  .
.
We have see earlier in Theorem 10.4 that  is an equilibrium if and only if
is an equilibrium if and only if

for all  , where
, where  is the aggregation function (10.4). In the following analysis we assume that the
is the aggregation function (10.4). In the following analysis we assume that the  -person game satisfies all conditions presented at the beginning of Subsection 10.2.9 and (10.42) holds with some positive
-person game satisfies all conditions presented at the beginning of Subsection 10.2.9 and (10.42) holds with some positive  .
.
We first show the equivalence of (10.45) and a variational inequality.
Theorem 10.17 A vector  satisfies (10.45) if and only if
satisfies (10.45) if and only if

for all  , where
, where  is defined in (10.41).
is defined in (10.41).
Proof. Assume  satisfies (10.45). Then
satisfies (10.45). Then  as function of
as function of  obtains maximum at
obtains maximum at  , therefore
, therefore

for all  , and since
, and since  is
is  , we proved that
, we proved that  satisfies (10.46).
satisfies (10.46).
Assume next that  satisfies (10.46). By the concavity of
satisfies (10.46). By the concavity of  in
in  and the diagonally strict concavity of the game we have
and the diagonally strict concavity of the game we have

so  satisfies (10.45).
satisfies (10.45).
Hence any method available for solving variational inequalities can be used to find equilibria.
Next we construct a special two-person, game the equilibrium problem
of which is equivalent to the equilibrium problem of the original  -person game.
-person game.
Theorem 10.18 Vector  satisfies (10.45) if and only if
satisfies (10.45) if and only if  is an equilibrium of the two-person game
is an equilibrium of the two-person game  where
where 
 Assume first that
Assume first that  satisfies (10.45). Then it satisfies (10.46) as well, so
satisfies (10.45). Then it satisfies (10.46) as well, so

We need in addition to show that

In contrary assume that with some  ,
,  . Then
. Then

where we used (10.42) and (10.46). This is a clear contradiction.
 Assume next that
Assume next that  is an equilibrium of game
is an equilibrium of game  . Then for any
. Then for any  ,
,

The first part can be rewritten as

showing that (10.46) is satisfied, so is (10.45).
Consider the following iteration procedure.
Let  be arbitrary, and solve problem
be arbitrary, and solve problem

Let  denote an optimal solution and define
denote an optimal solution and define  . If
. If  , then for all
, then for all  ,
,

so by Theorem 10.17,  is an equilibrium. Since
is an equilibrium. Since  , we assume that
, we assume that  . In the general step
. In the general step  we have already
we have already  vectors
vectors  , and
, and  scalers
scalers  . Then the next vector
. Then the next vector  and next scaler
and next scaler  are the solutions of the following problem:
are the solutions of the following problem:

Notice that

and

so we know that  .
.
The formal algorithm is as follows:
Continuous-Equilibrium
12 solve problem (10.47), let
be optimal solution 3
IF4
THENis equilibrium 5
RETURN6
7 solve problem (10.48), let
be optimal solution 8
IF9
THENis equilibrium 10
RETURN11
ELSEgo to 5
Before stating the convergence theorem of the algorithm we notice
that in the special case when the strategy sets are defined by linear
inequalities (that is, all functions  are linear) then all constraints of problem (10.48) are linear, so at each iteration step we have to solve a linear programming problem.
are linear) then all constraints of problem (10.48) are linear, so at each iteration step we have to solve a linear programming problem.
In this linear case the simplex method has to be used in each iteration step with exponential computational cost, so the overall cost is also exponential (with prefixed number of steps).
Theorem 10.19 There is a subsequence  of
of  generated by the method that converges to the unique equilibrium of the
generated by the method that converges to the unique equilibrium of the  -person game.
-person game.
Proof. The proof consists of several steps.
First we show that  as
as  . Since at each new iteration an additional constraint is added to (10.48), sequence
. Since at each new iteration an additional constraint is added to (10.48), sequence  is nonincreasing. Since it is also nonnegative, it must be convergent. Sequence
is nonincreasing. Since it is also nonnegative, it must be convergent. Sequence  is bounded, since it is from the bounded set
is bounded, since it is from the bounded set  , so it has a convergent subsequence
, so it has a convergent subsequence  . Notice that from (10.48) we have
. Notice that from (10.48) we have

where the right hand side tends to zero. Thus  and since the entire sequence
and since the entire sequence  is monotonic, the entire sequence converges to zero.
is monotonic, the entire sequence converges to zero.
Let next  be an equilibrium of the
be an equilibrium of the  -person game, and define
-person game, and define

By (10.42),  for all
for all  . Define the indices
. Define the indices  so that
so that

then for all  , ?
, ?

which implies that
where we used again problem (10.48). From this relation we conclude that  as
as  . And finally, notice that function
. And finally, notice that function  satisfies the following properties:
satisfies the following properties:
1.  is continuous in
is continuous in  ;
;
2.  if
if  (as it was shown just below relation (10.49));
(as it was shown just below relation (10.49));
3. if for a convergent sequence  ,
,  , then necessarily
, then necessarily  .
.
By applying property  with sequence
with sequence  it is clear that
it is clear that  so
so  . Thus the proof is complete.
. Thus the proof is complete.
Exercises
10.2-1 Consider a 2-person game with strategy sets  , and payoff functions
, and payoff functions  and
and  . Show the existence of a unique equilibrium point by computing it. Show that Theorem 10.3. cannot be applied to prove existence.
. Show the existence of a unique equilibrium point by computing it. Show that Theorem 10.3. cannot be applied to prove existence.
10.2-2 Consider the “price war” game in which two firms are price setting. Assume that  and
and  are the strategies of the players,
are the strategies of the players,  and the payoff functions are:
and the payoff functions are:


by assuming that  . Is there an equilibrium? How many equilibria were found?
. Is there an equilibrium? How many equilibria were found?
10.2-3 A portion of the sea is
modeled by the unit square in which a submarine is hiding. The strategy
of the submarine is the hiding place  . An airplane drops a bomb in a location
. An airplane drops a bomb in a location  , which is its strategy. The payoff of the airplane is the damage
, which is its strategy. The payoff of the airplane is the damage  occurred by the bomb, and the payoff of the submarine is its negative. Does this 2-person game have an equilibrium?
occurred by the bomb, and the payoff of the submarine is its negative. Does this 2-person game have an equilibrium?
10.2-4 In the second-price auction they sell one unit of an item to  bidders. They value the item as
bidders. They value the item as  .
Each of them offers a price for the item simultaneously without knowing
the offers of the others. The bidder with the highest offer will get
the item, but he has to pay only the second highest price. So the
strategy of bidder
.
Each of them offers a price for the item simultaneously without knowing
the offers of the others. The bidder with the highest offer will get
the item, but he has to pay only the second highest price. So the
strategy of bidder  is
is  , so
, so  , and the payoff function for this bidder is:
, and the payoff function for this bidder is:

What is the best response function of bidder  ? Does this game have equilibrium?
? Does this game have equilibrium?
10.2-5 Formulate Fan's inequality for Exercise 10.2-1.
10.2-6 Formulate and solve Fan's inequality for Exercise 10.2-2.
10.2-7 Formulate and solve Fan's inequality for Exercise 10.2-4.
10.2-8 Consider a 2-person game with strategy sets  , and payoff functions
, and payoff functions


Formulate Fan's inequality.
10.2-9 Let  ,
,  ,
,  . Formulate the Kuhn-Tucker conditions to find the equilibrium. Solve the resulted system of inequalities and equations.
. Formulate the Kuhn-Tucker conditions to find the equilibrium. Solve the resulted system of inequalities and equations.
10.2-10 Consider a 3-person game with  ,
,  ,
,  and
and  . Formulate the Kuhn-Tucker condition.
. Formulate the Kuhn-Tucker condition.
10.2-11 Formulate and solve system (10.9) for exercise 10.2-8.
10.2-12 Repeat the previous problem for the game given in exercise 10.2-1
10.2-13 Rewrite the Kuhn-Tucker conditions for exercise 10.2-8 into the optimization problem (10.10) and solve it.
10.2-14 Formulate the mixed extension of the finite game given in Exercise 10.1-1.
10.2-15 Formulate and solve optimization problem (10.10) for the game obtained in the previous problem.
10.2-16 Formulate the mixed extension of the game introduced in Exercise 10.2-3. Formulate and solve the corresponding linear optimization problems (10.22) with  ,
,  ,
,  .
.
10.2-17 Use fictitious play method for solving the matrix game of exercise 10.2-16.
10.2-18 Generalize the fictitious play method for bimatrix games.
10.2-19 Generalize the fictitious play method for the mixed extensions of finite  -person games.
-person games.
10.2-20 Solve the bimatrix game with matrics  and
and  with the method you have developed in Exercise 10.2-18.
with the method you have developed in Exercise 10.2-18.
10.2-21 Solve the symmetric matrix game  by linear programming.
by linear programming.
10.2-22 Repeat exercise 10.2-21 with the method of fictitious play.
10.2-23 Develop the Kuhn-Tucker conditions (10.9) for the game given in Exercise 10.2-21 above.
10.2-24 Repeat Exercises 10.2-21, 10.2-22 and 10.2-23 for the matrix game  (First find the equivalent symmetric matrix game!).
(First find the equivalent symmetric matrix game!).
10.2-25 Formulate the linear programming problem to solve the matrix game with matrix  .
.
10.2-26 Formulate a linear programming solver based on the method of fictitious play and solve the LP problem:
10.2-27 Solve the LP problem given in Example 8.17 by the method of fictitious play.
10.2-28 Solve Exercise 10.2-21 by the method of von Neumann.
10.2-29 Solve Exercise 10.2-24 by the method of von Neumann.
10.2-30 Solve Exercise 10.2-17 by the method of von Neumann.
10.2-31 Check the solution obtained in the previous exercises by verifying that all constraints of (10.21) are satisfied with zero objective function.
Hint. What  and
and  should be selected?
should be selected?
10.2-32 Solve exercise 10.2-26 by the method of von Neumann.
10.2-33 Let  ,
,  ,
,  . Show that both payoff functions are strictly concave in
. Show that both payoff functions are strictly concave in  and
and  respectively. Prove that there are infinitely many equilibria, that is
, the strict concavity of the payoff functions does not imply the
uniqueness of the equilibrium.
respectively. Prove that there are infinitely many equilibria, that is
, the strict concavity of the payoff functions does not imply the
uniqueness of the equilibrium.
10.2-34 Can matrix games be strictly diagonally concave?
10.2-35 Consider a two-person game with strategy sets  , and payoff functions
, and payoff functions  ,
,  . Show that this game satisfies all conditions of Theorem 10.16.
. Show that this game satisfies all conditions of Theorem 10.16.
10.2-36 Solve the problem of the previous exercise by algorithm (10.47)–(10.48).
The previous sections presented general methodology, however special
methods are available for almost all special classes of games. In the
following parts of this chapter a special game, the oligopoly game will be examined. It describes a real-life economic situation when  -firms produce a homogeneous good to a market, or offers the same service. This model is known as the classical Cournot model. The firms are the players. The strategy of each player is its production level
-firms produce a homogeneous good to a market, or offers the same service. This model is known as the classical Cournot model. The firms are the players. The strategy of each player is its production level  with strategy set
with strategy set  , where
, where  is its capacity limit. It is assumed that the market price depends on the total production level
is its capacity limit. It is assumed that the market price depends on the total production level  offered to the market:
offered to the market:  , and the cost of each player depends on its own production level:
, and the cost of each player depends on its own production level:  . The profit of each firm is given as
. The profit of each firm is given as

In this way an  -person game
-person game  is defined.
is defined.
It is usually assumed that functions  and
and  are twice continuously differentiable, furthermore
are twice continuously differentiable, furthermore
-
 ;
; -
 ;
; -

for all  ,
,  and
and  . Under assumptions 1–3. the game satisfies all conditions of Theorem 10.3, so there is at least one equilibrium.
. Under assumptions 1–3. the game satisfies all conditions of Theorem 10.3, so there is at least one equilibrium.
Best reply mappings.
Notice that with the notation  , the payoff function of player
, the payoff function of player  can be rewritten as
can be rewritten as

Since  is a compact set and this function is strictly concave in
is a compact set and this function is strictly concave in  , with fixed
, with fixed  there is a unique profit maximizing production level of player
there is a unique profit maximizing production level of player  , which is its best reply and is denoted by
, which is its best reply and is denoted by  .
.
It is easy to see that there are three cases:  if
if  ,
,  if
if  , and otherwise
, and otherwise  is the unique solution of the monotonic equation
is the unique solution of the monotonic equation

Assume that  . Then implicit differentiation with respect to
. Then implicit differentiation with respect to  shows that
shows that

showing that
Notice that from assumptions 2. and 3.,

which is also true for the other two cases except for the break points.
As in Subsection 10.2.1 we can introduce the best reply mapping:

and look for its fixed points. Another alternative is to introduce dynamic process which converges to the equilibrium.
Similarly to the method of fictitious play a discrete system can be developed in which each firm selects its best reply against the actions of the competitors chosen at the previous time period:

Based on relation (10.52) we see that for  the right hand side mapping
the right hand side mapping  is a contraction, so it converges, however if
is a contraction, so it converges, however if  , then no convergence can be established. Consider next a slight modification of this system: with some
, then no convergence can be established. Consider next a slight modification of this system: with some  :
:

for  . Clearly the steady-states of this system are the equilibria, and it can be proved that if
. Clearly the steady-states of this system are the equilibria, and it can be proved that if  is sufficiently small, then sequences
is sufficiently small, then sequences  are all convergent to the equilibrium strategies.
are all convergent to the equilibrium strategies.
Consider next the continuous counterpart of model (10.55), when (similarly to the method of von Neumann) continuous time scales are assumed:

The following result shows the convergence of this process.
Theorem 10.20 Under assumptions 1–3, system (10.56) is asymptotically stable, that is, if the initial  values are selected close enough to the equilibrium, then as
values are selected close enough to the equilibrium, then as  ,
,  converges to the equilibrium strategy for all
converges to the equilibrium strategy for all  .
.
Proof. It is sufficient to show that the eigenvalues of the Jacobian of the system have negative real parts. Clearly the Jacobian is as follows:

where  at the equilibrium. From (10.52) we know that
at the equilibrium. From (10.52) we know that  for all
for all  . In order to compute the eigenvalues of
. In order to compute the eigenvalues of  we will need a simple but very useful fact. Assume that
we will need a simple but very useful fact. Assume that  and
and  are
are  -element real vectors. Then
-element real vectors. Then

where  is the
is the  identity matrix. This relation can be easily proved by using finite induction with respect to
identity matrix. This relation can be easily proved by using finite induction with respect to  . By using (10.58), the characteristic polynomial of
. By using (10.58), the characteristic polynomial of  can be written as
can be written as
where we used the notation

The roots of the first factor are all negative:  , and the other eigenvalues are the roots of equation
, and the other eigenvalues are the roots of equation
Notice that by adding the terms with identical denominators this equation becomes

with  , and the
, and the  are different. If
are different. If  denotes the left hand side then clearly the values
denotes the left hand side then clearly the values  are the poles,
are the poles,
so  strictly decreases locally. The graph of the function is shown in Figure 10.5. Notice first that (10.59) is equivalent to a polynomial equation of degree
strictly decreases locally. The graph of the function is shown in Figure 10.5. Notice first that (10.59) is equivalent to a polynomial equation of degree  , so there are
, so there are  real or complex roots. The properties of function
real or complex roots. The properties of function  indicate that there is one root below
indicate that there is one root below  , and one root between each
, and one root between each  and
and 
 . Therefore all roots are negative, which completes the proof.
. Therefore all roots are negative, which completes the proof.
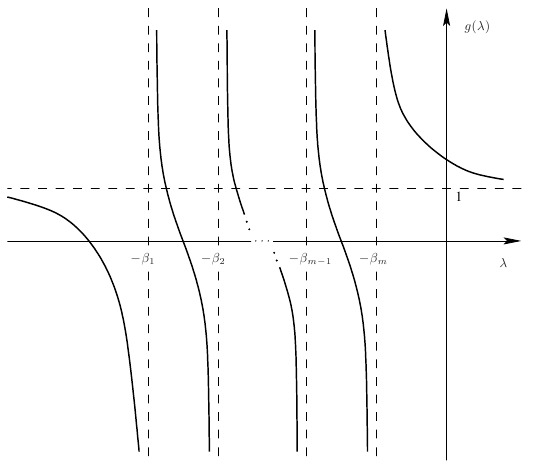
The general discrete model (10.55) can be examined in the same way. If  for all
for all  , then model (10.55) reduces to the simple dynamic process (10.54).
, then model (10.55) reduces to the simple dynamic process (10.54).
Example 10.21 Consider now a  -person oligopoly with price function
-person oligopoly with price function

strategy sets  , and cost functions
, and cost functions

The profit of firm  is therefore the following:
is therefore the following:

The best reply of play  can be obtained as follows. Following the method outlined at the
beginning of “Best reply mappings.” we have the following three cases.
If
can be obtained as follows. Following the method outlined at the
beginning of “Best reply mappings.” we have the following three cases.
If  , then
, then  is the best choice. If
is the best choice. If  , then
, then  is the optimal decision. Otherwise
is the optimal decision. Otherwise  is the solution of equation
is the solution of equation

where the only positive solution is

After the best replies are found, we can easily construct any of the methods presented before.
Reduction to single-dimensional fixed point problems.
Consider an  -firm oligopoly with price function
-firm oligopoly with price function  and cost functions
and cost functions  (
( ). Introduce the following function
). Introduce the following function

and define

for  and let
and let

Notice that if  , then all elements of
, then all elements of  are also in this interval, therefore
are also in this interval, therefore  is a single-dimensional point-to-set mapping. Clearly
is a single-dimensional point-to-set mapping. Clearly  is an equilibrium of the
is an equilibrium of the  -firm oligopoly game if and only if
-firm oligopoly game if and only if  is a fixed point of mapping
is a fixed point of mapping  and for all
and for all  ,
,  .
Hence the equilibrium problem has been reduced to find fixed points of
only one-dimensional mappings. This is a significant reduction in the
difficulty of the problem, since best replies are
.
Hence the equilibrium problem has been reduced to find fixed points of
only one-dimensional mappings. This is a significant reduction in the
difficulty of the problem, since best replies are  -dimensional mappings.
-dimensional mappings.
If conditions 1–3 are satisfied, then  has exactly one element for all
has exactly one element for all  and
and  :
:

where  is the unique solution of the monotonic equation
is the unique solution of the monotonic equation

in the interval  . In the third case, the left hand side is positive at
. In the third case, the left hand side is positive at  , negative at
, negative at  , and by conditions 2–3, it is strictly decreasing, so there is a unique solution.
, and by conditions 2–3, it is strictly decreasing, so there is a unique solution.
In the entire interval  ,
,  is nonincreasing. In the first two cases it is constant and in the
third case strictly decreasing. Consider finally the single-dimensional
equation
is nonincreasing. In the first two cases it is constant and in the
third case strictly decreasing. Consider finally the single-dimensional
equation

At  the left hand side is nonnegative, at
the left hand side is nonnegative, at  it is nonpositive, and is strictly decreasing. Therefore there is a unique solution (that is, fixed point of mapping
it is nonpositive, and is strictly decreasing. Therefore there is a unique solution (that is, fixed point of mapping  ), which can be obtained by any method known to solve single-dimensional equations.
), which can be obtained by any method known to solve single-dimensional equations.
Let  be the initial interval for the solution of equation (10.65). After
be the initial interval for the solution of equation (10.65). After  bisection steps the accuracy becomes
bisection steps the accuracy becomes  , which will be smaller than an error tolerance
, which will be smaller than an error tolerance  if
if  .
.
Oligopoly-Equilibrium(
)
1 solve equation (10.65) for2
FORto
3
DOsolve equation (10.64), and let4
is equilibrium
Example 10.22 Consider the 3-person oligopoly examined in the previous example. From (10.63) we hav

where  is the unique solution of equation
is the unique solution of equation

The first case occurs for  , the second case never occurs, and in the third case there is a unique positive solution:
, the second case never occurs, and in the third case there is a unique positive solution:

And finally equation (10.65) has the special form

A single program based on the bisection method gives the solution  and then equation (10.66) gives the equilibrium strategies
and then equation (10.66) gives the equilibrium strategies  ,
,  ,
,  .
.
Methods based on Kuhn-Tucker conditions
Notice first that in the case of  -player oligopolies
-player oligopolies  , so we select
, so we select

and since the payoff functions are

the Kuhn-Tucker conditions (10.9) have the following form. The components of the 2-dimensional vectors  will be denoted by
will be denoted by  and
and  . So we have for
. So we have for  ,
,

One might either look for feasible solutions of these relations or rewrite them as the optimization problem (10.10), which has the following special form in this case:

Computational cost in solving (10.69) or (10.70) depends on the type of functions  and
and  . No general characterization can be given.
. No general characterization can be given.
Example 10.23 In the case of the three-person oligopoly introduced in Example 10.21 we have
A professional optimization software was used to obtain the optimal solutions:

and all  .
.
Reduction to complementarity problems.
If  is an equilibrium of an
is an equilibrium of an  -person oligopoly, then with fixed
-person oligopoly, then with fixed  maximizes the payoff
maximizes the payoff  of player
of player  . Assuming that condition 1–3 are satisfied,
. Assuming that condition 1–3 are satisfied,  is concave in
is concave in  , so
, so  maximizes
maximizes  if and only if at the equilibrium
if and only if at the equilibrium
So introduce the slack variables
and

Then clearly at the equilibrium

and by the definition of the slack variables


and if we add the nonnegativity conditions

then we obtain a system of nonlinear relations (10.71)–(10.75) which are equivalent to the equilibrium problem.
We can next show that relations (10.71)–(10.75) can be rewritten as a nonlinear complementarity problem, for the solution of which standard methods are available. For this purpose introduce the notation

then system (10.72)–(10.75) can be rewritten as

This problem is the usual formulation of nonlinear complementarity problems. Notice that the last condition requires that in each component either  or
or  or both must be zero.
or both must be zero.
The computational cost in solving problem (10.76) depends on the type of the involved functions and the choice of method.
Example 10.24 In the case of the 3-person oligopoly introduced and examined in the previous examples we have:

Linear oligopolies and quadratic programming.
In this section  -player oligopolies will be examined under the special condition that the price and all cost functions are linear :
-player oligopolies will be examined under the special condition that the price and all cost functions are linear :

where  ,
,  , and
, and  are positive, but
are positive, but  . Assume again that the strategy set of player
. Assume again that the strategy set of player  is the interval
is the interval  . In this special case
. In this special case

for all  , therefore
, therefore

and relations (10.71)–(10.75) become more special:
where we changed the order of them. Introduce the following vectors and matrixes:


Then the above relations can be summarized as:

Next we prove that matrix  is negative definite. With any nonzero vector
is negative definite. With any nonzero vector  ,
,

which proves the assertion.
Observe that relations (10.79) are the Kuhn-Tucker conditions of the strictly concave quadratic programming problem:

and
since the feasible set is a bounded linear polyhedron and the objective
function is strictly concave, the Kuhn-Tucker conditions are sufficient
and necessary. Consequently a vector  is an equilibrium if and only if it is the unique optimal solution of problem (10.80). There are standard methods to solve problem (10.80) known from the literature.
is an equilibrium if and only if it is the unique optimal solution of problem (10.80). There are standard methods to solve problem (10.80) known from the literature.
Since (10.79) is a convex quadratic programming problem, several algorithms are available. Their costs are different, so computation cost depends on the particular method being selected.
Example 10.25 Consider now a duopoly (two-person oligopoly) where the price function is  and the cost functions are
and the cost functions are  and
and  with capacity limits
with capacity limits  . That is,
. That is,

Therefore,

so the quadratic programming problem can be written as:
It
is easy to see by simple differentiation that the global optimum at the
objective function without the constraints is reached at  and
and  .
They however satisfy the constraints, so they are the optimal
solutions. Hence they provide the unique equilibrium of the duopoly.
.
They however satisfy the constraints, so they are the optimal
solutions. Hence they provide the unique equilibrium of the duopoly.
Exercises
10.3-1 Consider a duopoly with  ,
,  and costs
and costs  . Examine the convergence of the iteration scheme (10.55).
. Examine the convergence of the iteration scheme (10.55).
10.3-2 Select  ,
,  ,
, 
 and
and
Show that there are infinitely many equilibria:

10.3-3 Consider the duopoly of Exercise 10.3-1 above. Find the best reply mappings of the players and determine the equilibrium.
10.3-4 Consider again the duopoly of the previous problem.
(a) Construct the one-dimensional fixed point problem of mapping (10.62) and solve it to obtain the equilibrium.
(b) Formulate the Kuhn-Tucker equations and inequalities (10.69).
(c) Formulate the complementarity problem (10.76) in this case.
CHAPTER NOTES |
(Economic) Nobel Prize was given only once, in 1994 in the field of game theory. One of the winner was John Nash , who received this honor for his equilibrium concept, which was introduced in 1951 [190].
Backward induction is a more restrictive equilibrium concept. It was developed by Kuhn and can be found in [154]. Since it is more restrictive equilibrium, it is also a Nash equilibrium.
The existence and computation of equilibria can be reduced to those of fixed points. the different variants of fixed point theorems-such as that of Brouwer [33], Kakutani [135], Tarski [255] are successfully used to prove existence in many game classes. The article [194] uses the fixed point theorem of Kakutani. The books [254] and [77] discuss computer methods for computing fixed points. The most popular existence result is the well known theorem of Nikaido and Isoda [194].
The Fan inequality is discussed in the book of Aubin [15]. The Kuhn-Tucker conditions are presented in the book of Martos [175]. By introducing slack and surplus variables the Kuhn-Tucker conditions can be rewritten as a system of equations. For their computer solutions well known methods are available ([254] and [175]).
The reduction of bimatrix games to mixed optimization problems is presented in the papers of Mills [183] and Shapiro [235]. The reduction to quadratic programming problem is given in ([173]).
The method of fictitious play is discussed in the paper of Robinson [215]. In order to use the Neumann method we have to solve a system of nonlinear ordinary differential equations. The Runge–Kutta method is the most popular procedure for doing it. It can be found in [254].
The paper of Rosen [216] introduces diagonally strictly concave games. The computer method to find the equilibria of  -person concave games is introduced in Zuhovitsky et al. [283].
-person concave games is introduced in Zuhovitsky et al. [283].
The different extensions and generalizations of the classical Cournot model can be found in the books of Okuguchi and Szidarovszky [196], [197]. The proof of Theorem 10.20 is given in [253]. For the proof of Lemma 10.58 see the monograph [197]. The bisection method is described in [254]. The paper [137] contains methods which are applicable to solve nonlinear complementarity problems. The solution of problem (10.80) is discussed in the book of Hadley [105].
The book of von Neumann and Morgenstern [193] is considered the classical textbook of game theory. There is a large variety of game theory textbooks (see for example [77]).
Table of Contents
The recursive definition of the Fibonacci numbers is well-known: if  is the
is the  Fibonacci number then
Fibonacci number then


We are interested in an explicit form of the numbers  for all natural numbers
for all natural numbers  . Actually, the problem is to solve an equation where the unknown is given recursively, in which case the equation is called a recurrence equation. The solution can be considered as a function over natural numbers, because
. Actually, the problem is to solve an equation where the unknown is given recursively, in which case the equation is called a recurrence equation. The solution can be considered as a function over natural numbers, because  is defined for all
is defined for all  . Such recurrence equations are also known as difference equations, but could be named as discrete differential equations for their similarities to differential equations.
. Such recurrence equations are also known as difference equations, but could be named as discrete differential equations for their similarities to differential equations.
Definition 11.1 A k  order recurrence equation
order recurrence equation  is an equation of the form
is an equation of the form

where  has to be given in an explicit form.
has to be given in an explicit form.
For a unique determination of  ,
,  initial values must be given. Usually these values are
initial values must be given. Usually these values are  . These can be considered as initial conditions. In case of the equation for Fibonacci-numbers, which is of second order, two initial values must be given.
. These can be considered as initial conditions. In case of the equation for Fibonacci-numbers, which is of second order, two initial values must be given.
A sequence  satisfying equation (11.1) and the corresponding initial conditions is called a particular solution. If all particular solutions of equation (11.1) can be obtained from the sequence
satisfying equation (11.1) and the corresponding initial conditions is called a particular solution. If all particular solutions of equation (11.1) can be obtained from the sequence  , by adequately choosing of the constants
, by adequately choosing of the constants  , then this sequence
, then this sequence  is a general solution.
is a general solution.
Solving recurrence equations is not an easy task. In this chapter we
will discuss methods which can be used in special cases. For simplicity
of writing we will use the notation  instead of
instead of  as it appears in several books (sequences can be considered as functions over natural numbers).
as it appears in several books (sequences can be considered as functions over natural numbers).
The chapter is divided into three sections. In Section 11.1 we deal with solving linear recurrence equations, in Section 11.2 with generating functions and their use in solving recurrence equations and in Section 11.3 we focus our attention on the numerical solution of recurrence equations.
If the recurrence equation is of the form

where  are functions defined over natural numbers,
are functions defined over natural numbers,  , and
, and  has to be given explicitly, then the recurrence equation is linear. If
has to be given explicitly, then the recurrence equation is linear. If  is the zero function, then the equation is homogeneous, otherwise nonhomogeneous. If all the functions
is the zero function, then the equation is homogeneous, otherwise nonhomogeneous. If all the functions  are constant, the equation is called a linear recurrence equation with constant coefficients.
are constant, the equation is called a linear recurrence equation with constant coefficients.
Let the equation be

where  are real constants,
are real constants,  . If
. If  initial conditions are given (usually
initial conditions are given (usually  ), then the general solution of this equation can be uniquely given.
), then the general solution of this equation can be uniquely given.
To solve the equation let us consider its characteristic equation

a polynomial equation with real coefficients. This equation has  roots in the field of complex numbers. It can easily be seen after a simple substitution that if
roots in the field of complex numbers. It can easily be seen after a simple substitution that if  is a real solution of the characteristic equation, then
is a real solution of the characteristic equation, then  is a solution of (11.2), for arbitrary
is a solution of (11.2), for arbitrary  .
.
The general solution of equation (11.2) is

where  (
( ) are the linearly independent solutions of equation (11.2). The constants
) are the linearly independent solutions of equation (11.2). The constants  can be determined from the initial conditions by solving a system of
can be determined from the initial conditions by solving a system of  equations.
equations.
The linearly independent solutions are supplied by the roots of the characteristic equation in the following way. A fundamental solution of equation (11.2) can be associated with each root of the characteristic equation. Let us consider the following cases.
Distinct real roots. Let  be distinct real roots of the characteristic equation. Then
be distinct real roots of the characteristic equation. Then

are solutions of equation (11.2), and

is also a solution, for arbitrary constants  . If
. If  , then (11.4) is the general solution of the recurrence equation.
, then (11.4) is the general solution of the recurrence equation.
Example 11.1 Solve the recurrence equation

The corresponding characteristic equation is

with the solutions

These are distinct real solutions, so the general solution of the equation is

The constants  and
and  can be determined using the initial conditions. From
can be determined using the initial conditions. From  ,
,  the following system of equations can be obtained.
the following system of equations can be obtained.
The solution of this system of equations is  . Therefore the general solution is
. Therefore the general solution is

which is the  th Fibonacci number
th Fibonacci number  .
.
Multiple real roots. Let  be a real root of the characteristic equation with multiplicity
be a real root of the characteristic equation with multiplicity  . Then
. Then

are solutions of equation (11.2) (fundamental solutions corresponding to  ), and
), and

is also a solution, for any constants  . If the characteristic equation has no other solutions, then (11.5) is a general solution of the recurrence equation.
. If the characteristic equation has no other solutions, then (11.5) is a general solution of the recurrence equation.
Example 11.2 Solve the recurrence equation

The characteristic equation is

with  a solution with multiplicity 2. Then
a solution with multiplicity 2. Then

is a general solution of the recurrence equation.
From the initial conditions we have
From this system of equations  , so the general solution is
, so the general solution is

Distinct complex roots. If the complex number  , written in trigonometric form, is a root of the characteristic equation, then its conjugate
, written in trigonometric form, is a root of the characteristic equation, then its conjugate  is also a root, because the coefficients of the characteristic equation are real numbers. Then
is also a root, because the coefficients of the characteristic equation are real numbers. Then

are solutions of equation (11.2) and

is also a solution, for any constants  and
and  . If these are the only solutions of a second order characteristic equation, then (11.6) is a general solution.
. If these are the only solutions of a second order characteristic equation, then (11.6) is a general solution.
Example 11.3 Solve the recurrence equation

The corresponding characteristic equation is

with roots  and
and  . These can be written in trigonometric form as
. These can be written in trigonometric form as  and
and  . Therefore
. Therefore

is a general solution of the recurrence equation. From the initial conditions
Therefore  . Hence the general solution is
. Hence the general solution is
Multiple complex roots. If the complex number written in trigonometric form as  is a root of the characteristic equation with multiplicity
is a root of the characteristic equation with multiplicity  , then its conjugate
, then its conjugate  is also a root with multiplicity
is also a root with multiplicity  . Then
. Then

and

are solutions of the recurrence equation (11.2). Then

is also a solution, where  are arbitrary constants, which can be determined from the initial
conditions. This solution is general if the characteristic equation has
no other roots.
are arbitrary constants, which can be determined from the initial
conditions. This solution is general if the characteristic equation has
no other roots.
Example 11.4 Solve the recurrence equation

The characteristic equation is

which can be written as  . The complex numbers
. The complex numbers  and
and  are double roots. The trigonometric form of these are
are double roots. The trigonometric form of these are

respectively. Therefore the general solution is

From the initial conditions we obtain
that is
Solving this system of equations  ,
,  ,
,  and
and  . Thus the general solution is
. Thus the general solution is

Using these four cases all linear homogeneous equations with constant coefficients can be solved, if we can solve their characteristic equations.
Example 11.5 Solve the recurrence equation

The characteristic equation is

with roots 2,  and
and  . Therefore the general solution is
. Therefore the general solution is

After determining the constants we obtain

The general solution. The characteristic equation of the  th order linear homogeneous equation (11.2) has
th order linear homogeneous equation (11.2) has  roots in the field of complex numbers, which are not necessarily distinct. Let these roots be the following:
roots in the field of complex numbers, which are not necessarily distinct. Let these roots be the following:
 real, with multiplicity
real, with multiplicity  (
( ),
),
 real, with multiplicity
real, with multiplicity  (
( ),
),

 real, with multiplicity
real, with multiplicity  (
( ),
),  complex, with multiplicity
complex, with multiplicity  (
( ),
),
 complex, with multiplicity
complex, with multiplicity  (
( ),
),

 complex, with multiplicity
complex, with multiplicity  (
( ).
).
Since the equation has  roots,
roots,  .
.
In this case the general solution of equation (11.2) is
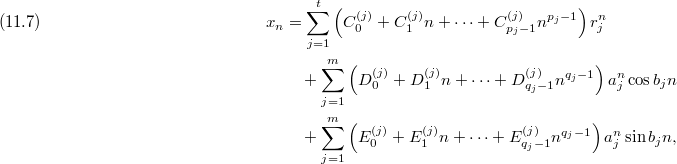
where

 are constants, which can be determined from the initial conditions.
are constants, which can be determined from the initial conditions.
The above statements can be summarised in the following theorem.
Theorem 11.2 Let  be an integer and
be an integer and  real numbers with
real numbers with  . The general solution of the linear recurrence equation (11.2) can be obtained as a linear combination of the terms
. The general solution of the linear recurrence equation (11.2) can be obtained as a linear combination of the terms  , where
, where  are the roots of the characteristic equation (11.3) with multiplicity
are the roots of the characteristic equation (11.3) with multiplicity  (
( ) and the coefficients of the linear combination depend on the initial conditions.
) and the coefficients of the linear combination depend on the initial conditions.
The proof of the theorem is left to the Reader (see Exercise 11.1-5).
The algorithm for the general solution is the following.
Linear-Homogeneous
1 determine the characteristic equation of the recurrence equation 2 find all roots of the characteristic equation with their multiplicities 3 find the general solution (11.7) based on the roots 4 determine the constants of (11.7) using the initial conditions, if these exists.
Consider the linear nonhomogeneous recurrence equation with constant coefficients

where  are real constants,
are real constants,  , and
, and  is not the zero function.
is not the zero function.
The corresponding linear homogeneous equation (11.2) can be solved using Theorem 11.2. If a particular solution of equation (11.8) is known, then equation (11.8) can be solved.
Theorem 11.3 Let  be an integer,
be an integer,  real numbers,
real numbers,  . If
. If  is a particular solution of the linear nonhomogeneous equation (11.8) and
is a particular solution of the linear nonhomogeneous equation (11.8) and  is a general solution of the linear homogeneous equation (11.2), then
is a general solution of the linear homogeneous equation (11.2), then

is a general solution of the equation (11.8).
The proof of the theorem is left to the Reader (see Exercise 11.1-6).
Example 11.6 Solve the recurrence equation

First we solve the homogeneous equation

and obtain the general solution

since the roots of the characteristic equation are  and 1. It is easy to see that
and 1. It is easy to see that

is a solution of the nonhomogeneous equation. Therefore the general solution is

The constants  and
and  can be determined using the initial conditions. Thus,
can be determined using the initial conditions. Thus,

A particular solution can be obtained using the method of variation of constants. However, there are cases when there is an easier way of finding a particular solution. In Figure 11.1 we can see types of functions  , for which a particular solution
, for which a particular solution  can be obtained in the given form in the table. The constants can be obtained by substitutions.
can be obtained in the given form in the table. The constants can be obtained by substitutions.
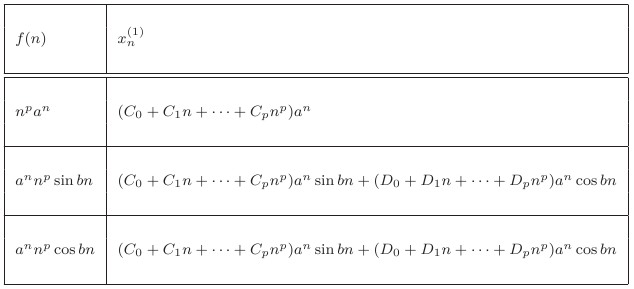
In the previous example  , so the first case can be used with
, so the first case can be used with  and
and  . Therefore we try to find a particular solution of the form
. Therefore we try to find a particular solution of the form  . After substitution we obtain
. After substitution we obtain  , thus the particular solution is
, thus the particular solution is

Exercises
11.1-1 Solve the recurrence equation

(Here  is the optimal number of moves in the problem of the Towers of Hanoi.)
is the optimal number of moves in the problem of the Towers of Hanoi.)
11.1-2 Analyse the problem of the Towers of Hanoi if  discs have to be moved from stick
discs have to be moved from stick  to stick
to stick  in such a way that no disc can be moved directly from
in such a way that no disc can be moved directly from  to
to  and vice versa.
and vice versa.
Hint. Show that if the optimal number of moves is denoted by  , and
, and  , then
, then  .
.
11.1-3 Solve the recurrence equation

11.1-4 Solve the linear nonhomogeneous recurrence equation

Hint. Try to find a particular solution of the form  .
.
11.1-5 Prove Theorem 11.2.
11.1-6 Prove Theorem 11.3.
Generating functions can be used, among others, to solve recurrence equations, count objects (e.g. binary trees), prove identities and solve partition problems. Counting the number of objects can be done by stating and solving recurrence equations. These equations are usually not linear, and generating functions can help us in solving them.
Associate a series with the infinite sequence  the following way
the following way

This is called the generating function of the sequence  .
.
For example, in case of the Fibonacci numbers this generating function is

Multiplying both sides of the equation by  , then by
, then by  , we obtain
, we obtain

If we subtract the second and the third equations from the first one term by term, then use the defining formula of the Fibonacci numbers, we get

that is

The correctness of these operations can be proved mathematically, but here we do not want to go into details. The formulae obtained using generating functions can usually also be proved using other methods. Let us consider the following generating functions

The generating functions  and
and  are equal, if and only if
are equal, if and only if  for all
for all  natural numbers.
natural numbers.
Now we define the following operations with the generating functions: addition, multiplication by real number, shift, multiplication, derivation and integration.
Addition and multiplication by real number.

Shift. The generating function

represents the sequence  , while the generating function
, while the generating function

represents the sequence  .
.
 . Then
. Then 
Multiplication. If  and
and  are generating functions, then
are generating functions, then

where  .
.
Special case. If  for all natural numbers
for all natural numbers  , then
, then

If, in addition,  for all
for all  , then
, then

Derivation.

Example 11.8 After differentiating both sides of the generating function
we obtain
Integration.


After integrating both sides we get

Multiplying the above generating functions we obtain
where  are the so-called harmonic numbers.
are the so-called harmonic numbers.
Changing the arguments. Let  represent the sequence
represent the sequence  , then
, then  represents the sequence
represents the sequence  . The following statements holds
. The following statements holds


 . Then
. Then 
which can also be obtained by substituting  by
by  in
in  . We can obtain the sum of the odd power terms in the same way,
. We can obtain the sum of the odd power terms in the same way,

Using generating functions we can obtain interesting formulae. For example, let  . Then
. Then  , which is the generating function of the Fibonacci numbers. From this
, which is the generating function of the Fibonacci numbers. From this

The coefficient of  on the left-hand side is
on the left-hand side is  , that is the
, that is the  th Fibonacci number, while the coefficient of
th Fibonacci number, while the coefficient of  on the right-hand side is
on the right-hand side is

after using the binomial formula in each term. Hence

Remember that the binomial formula can be generalised for all real  , namely
, namely
which is the generating function of the binomial coefficients for a given  . Here
. Here  is a generalisation of the number of combinations for any real number
is a generalisation of the number of combinations for any real number  , that is
, that is
We can obtain useful formulae using this generalisation for negative  . Let
. Let

Since, by a simple computation, we get

the following formula can be obtained
Then

and

where  is a natural number.
is a natural number.
If the generating function of the general solution of a recurrence equation to be solved can be expanded in such a way that the coefficients are in closed form, then this method is successful. Let the recurrence equation be

To solve it, let us consider the generating function
If (11.14) can be written as  and can be solved for
and can be solved for  , then
, then  can be expanded into series in such a way that
can be expanded into series in such a way that  can be written in closed form, equation (11.14) can be solved.
can be written in closed form, equation (11.14) can be solved.
Now we give a general method for solving linear nonhomogeneous recurrence equations. After this we give three examples for the nonlinear case. In the first two examples the number of elements in some sets of binary trees, while in the third example the number of leaves of binary trees is computed. The corresponding recurrence equations (11.15), (11.17) and (11.18) will be solved using generating functions.
Multiply both sides of equation (11.8) by  . Then
. Then

Summing up both sides of the equation term by term we get

Then

Let

The equation can be written as

This can be solved for  . If
. If  is a rational fraction, then it can be decomposed into partial
(elementary) fractions which, after expanding them into series, will
give us the general solution
is a rational fraction, then it can be decomposed into partial
(elementary) fractions which, after expanding them into series, will
give us the general solution  of the original recurrence equation. We can also try to use the
expansion into series in the case when the function is not a rational
fraction.
of the original recurrence equation. We can also try to use the
expansion into series in the case when the function is not a rational
fraction.
Example 11.11 Solve the following equation using the above method

After multiplying and summing we have

and

Since  , after decomposing the right-hand side into partial fractions, the solution of the equation is
, after decomposing the right-hand side into partial fractions, the solution of the equation is

After differentiating the generating function
term by term we get
Thus

therefore

Footnote. For decomposing the fraction into partial fractions we can use the Method of Undetermined Coefficients.
Let us denote by  the number of binary trees with
the number of binary trees with  vertices. Then
vertices. Then  ,
,  ,
,  (see Figure 11.2). Let
(see Figure 11.2). Let  . (We will see later that this is a good choice.)
. (We will see later that this is a good choice.)
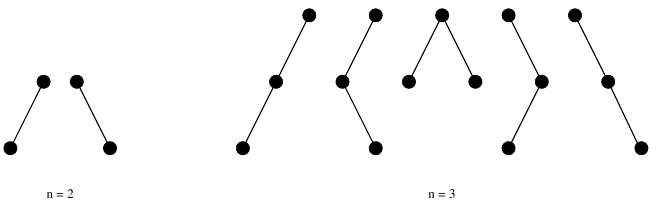
In a binary tree with  vertices, there are altogether
vertices, there are altogether  vertices in the left and right subtrees. If the left subtree has
vertices in the left and right subtrees. If the left subtree has  vertices and the right subtree has
vertices and the right subtree has  vertices, then there exists
vertices, then there exists  such binary trees. Summing over
such binary trees. Summing over  , we obtain exactly the number
, we obtain exactly the number  of binary trees. Thus for any natural number
of binary trees. Thus for any natural number  the recurrence equation in
the recurrence equation in  is
is

This can also be written as
Multiplying both sides by  , then summing over all
, then summing over all  , we obtain
, we obtain

Let  be the generating function of the numbers
be the generating function of the numbers  . The left-hand side of (11.16) is exactly
. The left-hand side of (11.16) is exactly  (because
(because  ).
The right-hand side looks like a product of two generating functions.
To see which functions are in consideration, let us use the notation
).
The right-hand side looks like a product of two generating functions.
To see which functions are in consideration, let us use the notation

Then the right-hand side of (11.16) is exactly  , which is
, which is  . Therefore
. Therefore

Solving this equation for  gives
gives
We have to choose the negative sign because  . Thus
. Thus
Therefore  . The numbers
. The numbers  are also called the Catalan numbers.
are also called the Catalan numbers.
Remark. In the previous computation we used the following formula that can be proved easily

 vertices.
vertices.Let us count the number of leaves (vertices with degree 1) in the set of all binary trees of  vertices. Denote this number by
vertices. Denote this number by  . We remark that the root is not considered leaf even if it is of degree 1. It is easy to see that
. We remark that the root is not considered leaf even if it is of degree 1. It is easy to see that  ,
,  . Let
. Let  and
and  , conventionally. Later we will see that this choice of the initial values is appropriate.
, conventionally. Later we will see that this choice of the initial values is appropriate.
As in the case of numbering the binary trees, consider the binary trees of  vertices having
vertices having  vertices in the left subtree and
vertices in the left subtree and  vertices in the right subtree. There are
vertices in the right subtree. There are  such left subtrees and
such left subtrees and  right subtrees. If we consider such a left subtree and all such right subtrees, then together there are
right subtrees. If we consider such a left subtree and all such right subtrees, then together there are  leaves in the right subtrees. So for a given
leaves in the right subtrees. So for a given  there are
there are  leaves. After summing we have
leaves. After summing we have
By an easy computation we get

This is a recurrence equation, with solution  . Let
. Let

Multiplying both sides of (11.17) by  and summing gives
and summing gives

Since  and
and  ,
,

Thus
and since

we have

After the computations

and

 vertices and
vertices and  leaves.
leaves.A bit harder problem: how many binary trees are there with  vertices and
vertices and  leaves? Let us denote this number by
leaves? Let us denote this number by  . It is easy to see that
. It is easy to see that  , if
, if  . By a simple reasoning the case
. By a simple reasoning the case  can be solved. The result is
can be solved. The result is  for any natural number
for any natural number  . Let
. Let  ,
conventionally. We will see later that this choice of the initial value
is appropriate. Let us consider, as in case of the previous problems,
the left and right subtrees. If the left subtree has
,
conventionally. We will see later that this choice of the initial value
is appropriate. Let us consider, as in case of the previous problems,
the left and right subtrees. If the left subtree has  vertices and
vertices and  leaves, then the right subtree has
leaves, then the right subtree has  vertices and
vertices and  leaves. The number of these trees is
leaves. The number of these trees is  . Summing over
. Summing over  and
and  gives
gives

For solving this recurrence equation the generating function

will be used. Multiplying both sides of equation (11.18) by  and summing over
and summing over  , we get
, we get

Changing the order of summation gives

Thus

or

Step by step, we can write the following:



Let us try to find the solution in the form

where  ,
,  ,
,  . Substituting in (11.19) gives a recursion for the numbers
. Substituting in (11.19) gives a recursion for the numbers 
We solve this equation using the generating function method. If  , then
, then  , and so
, and so  . Let
. Let  . If
. If  is the generating function of the numbers
is the generating function of the numbers  , then, using the formula of multiplication of the generating functions we obtain
, then, using the formula of multiplication of the generating functions we obtain

thus
Since  , only the negative sign can be chosen. After expanding the generating function we get
, only the negative sign can be chosen. After expanding the generating function we get
From this

Since  for
for  , it can be proved easily that
, it can be proved easily that  . Thus
. Thus

Using the formula

therefore
Thus

or

When solving linear nonhomogeneous equations using generating
functions, the solution is usually done by the expansion of a rational
fraction. The Z-transform method can help us in expanding such a
function. Let  be a rational fraction, where the degree of
be a rational fraction, where the degree of  is less, than the degree of
is less, than the degree of  .
If the roots of the denominator are known, the rational fraction can be
expanded into partial fractions using the Method of Undetermined
Coefficients.
.
If the roots of the denominator are known, the rational fraction can be
expanded into partial fractions using the Method of Undetermined
Coefficients.
Let us first consider the case when the denominator has distinct roots  . Then
. Then

It is easy to see that

But
where  . Now, by expanding this partial fraction, we get
. Now, by expanding this partial fraction, we get

Denote the coefficient of  by
by  , then
, then  , so
, so

or

After the transformation  and using
and using  we obtain
we obtain

where
Thus in the expansion of  the coefficient of
the coefficient of  is
is

If  is a root of the polynomial
is a root of the polynomial  , then
, then  is a root of
is a root of  . E.g. if
. E.g. if

If case of multiple roots, e.g. if  has multiplicity
has multiplicity  , their contribution to the solution is
, their contribution to the solution is

Here  is the derivative of order
is the derivative of order  of the function
of the function  .
.
All these can be summarised in the following algorithm. Suppose that the coefficients of the equation are in array  , and the constants of the solution are in array
, and the constants of the solution are in array  .
.
Linear-Nonhomogeneous(
)
1 letbe the equation, where
is a rational fraction; multiply both sides by
, and sum over all
2 transform the equation into the form
, where
,
and
are polynomials 3 use the transformation
, and let the result be
, where
are
are polynomials 4 denote the roots of
by
, with multiplicity
,
,
, with multiplicity
,
,

, with multiplicity
,
; then the general solution of the original equation is
, where
. 5
RETURN
If we substitute  by
by  in the generating function, the result is the so-called Z-transform,
for which similar operations can be defined as for the generating
functions. The residue theorem for the Z-transform gives the same
result. The name of the method is derived from this observation.
in the generating function, the result is the so-called Z-transform,
for which similar operations can be defined as for the generating
functions. The residue theorem for the Z-transform gives the same
result. The name of the method is derived from this observation.
Example 11.12 Solve the recurrence equation

Multiplying both sides by  and summing we obtain
and summing we obtain

or

Thus
After the transformation  we get
we get
where the roots of the denominator are 1 with multiplicity 1 and 2 with multiplicity 2. Thus


Therefore the general solution is

Example 11.13 Solve the recurrence equation

Multiplying by  and summing gives
and summing gives

so

that is
Then

The roots of the denominator are  and
and  . Let us compute
. Let us compute  and
and  :
:


Since

raising to the  th power gives
th power gives


Exercises
11.2-1 How many binary trees are there with  vertices and no empty left and right subtrees?
vertices and no empty left and right subtrees?
11.2-2 How many binary trees are there with  vertices, in which each vertex which is not a leaf, has exactly two descendants?
vertices, in which each vertex which is not a leaf, has exactly two descendants?
11.2-3 Solve the following recurrent equation using generating functions.

( is the number of moves in the problem of the Towers of Hanoi.)
is the number of moves in the problem of the Towers of Hanoi.)
11.2-4 Solve the following recurrent equation using the Z-transform method.

11.2-5 Solve the following system of recurrence equations:
where  .
.
Using the following function we can solve the linear recurrent equations numerically. The equation is given in the form

where  . The coefficients
. The coefficients  are kept in array
are kept in array  , the initial values
, the initial values  in array
in array  . To find
. To find  we will compute step by step the values
we will compute step by step the values  , keeping in the previous
, keeping in the previous  values of the sequence in the first
values of the sequence in the first  positions of
positions of  (i.e. in the positions with indices
(i.e. in the positions with indices  ).
).
Recurrence(
)
1FOR
TO2
DO3
FOR
TO4
DO5
6
IF7
THENFOR
TO8
DO9
10
RETURN
Lines 2–5 compute the values  (
( ) (using the previous
) (using the previous  values), denoted by
values), denoted by  in the algorithm. In lines 7–9, if
in the algorithm. In lines 7–9, if  is not yet reached, we copy the last
is not yet reached, we copy the last  values in the first
values in the first  positions of
positions of  . In line 10
. In line 10  is obtained. It is easy to see that the computation time is
is obtained. It is easy to see that the computation time is  , if we disregard the time to compute the values of the function.
, if we disregard the time to compute the values of the function.
Exercises
11.3-1 How many additions, subtractions, multiplications and divisions are required using the algorithm Recurrence, while it computes  using the data given in Example 11.4?
using the data given in Example 11.4?
PROBLEMS |
11-1 Existence of a solution of a homogeneous equation using generating function
Prove that a linear homogeneous equation cannot be solved using generating functions (because  is obtained) if and only if
is obtained) if and only if  for all
for all  .
.
11-2 Complex roots in case of Z-transform
What happens if the roots of the denominator are complex when applying the Z-transform method? The solution of the recurrence equation must be real. Does the method ensure this?
CHAPTER NOTES |
Recurrence equations are discussed in details by Agarwal [1], Elaydi [69], Flajolet and Sedgewick [230], Greene and Knuth [99], Mickens [180], and also in the recent books written by Drmota [67], further by Flajolet and Sedgewick [75]. Knuth [144] and Graham, Knuth and Patashnik [98] deal with generating functions. In the book of Vilenkin [263] there are a lot of simple and interesting problems about recurrences and generating functions.
In [167] Lovász also presents problems on generating functions. Counting the binary trees is from Knuth [144], counting the leaves in the set of all binary trees and counting the binary trees with  vertices and
vertices and  leaves are from Zoltán Kása [141].
leaves are from Zoltán Kása [141].
Table of Contents
This title refers to a fast developing interdisciplinary area between mathematics, computers and applications. The subject is also often called as Computational Science and Engineering. Its aim is the efficient use of computer algorithms to solve engineering and scientific problems. One can say with a certain simplification that our subject is related to numerical mathematics, software engineering, computer graphics and applications. Here we can deal only with some basic elements of the subject such as the fundamentals of the floating point computer arithmetic, error analysis, the basic numerical methods of linear algebra and related mathematical software.
Let  be the exact value and let
be the exact value and let  be an approximation of
be an approximation of  (
( ). The error of the approximation
). The error of the approximation  is defined by the formula
is defined by the formula  (sometimes with opposite sign). The quantity
(sometimes with opposite sign). The quantity  is called an (absolute) error (bound) of approximation
is called an (absolute) error (bound) of approximation  , if
, if  . For example, the error of the approximation
. For example, the error of the approximation  is at most
is at most  . In other words, the error bound of the approximation is
. In other words, the error bound of the approximation is  . The quantities
. The quantities  and
and  (and accordingly
(and accordingly  and
and  )
may be vectors or matrices. In such cases the absolute value and
relation operators must be understood componentwise. We also measure
the error by using matrix and vector norms. In such cases, the quantity
)
may be vectors or matrices. In such cases the absolute value and
relation operators must be understood componentwise. We also measure
the error by using matrix and vector norms. In such cases, the quantity
 is an error bound, if the inequality
is an error bound, if the inequality  holds.
holds.
The absolute error bound can be irrelevant in many cases. For example, an approximation with error bound  has no value in estimating a quantity of order
has no value in estimating a quantity of order  . The goodness of an approximation is measured by the relative error
. The goodness of an approximation is measured by the relative error  (
( for vectors and matrices), which compares the error bound to the
approximated quantity. Since the exact value is generally unknown, we
use the approximate relative error
for vectors and matrices), which compares the error bound to the
approximated quantity. Since the exact value is generally unknown, we
use the approximate relative error  (
( ). The committed error is proportional to the quantity
). The committed error is proportional to the quantity  , which can be neglected, if the absolute value (norm) of
, which can be neglected, if the absolute value (norm) of  and
and  is much greater than
is much greater than  . The relative error is often expressed in percentages.
. The relative error is often expressed in percentages.
In practice, the (absolute) error bound is used as a substitute for the generally unknown true error.
In the classical error analysis
we assume input data with given error bounds, exact computations
(operations) and seek for the error bound of the final result. Let  and
and  be exact values with approximations
be exact values with approximations  and
and  , respectively. Assume that the absolute error bounds of approximations
, respectively. Assume that the absolute error bounds of approximations  and
and  are
are  and
and  ,
respectively. Using the classical error analysis approach we obtain the
following error bounds for the four basic arithmetic operations:
,
respectively. Using the classical error analysis approach we obtain the
following error bounds for the four basic arithmetic operations:
We can see that the division with a number near to  can make the absolute error arbitrarily big. Similarly, if the result of subtraction is near to
can make the absolute error arbitrarily big. Similarly, if the result of subtraction is near to  ,
then its relative error can become arbitrarily big. One has to avoid
these cases. Especially the subtraction operation can be quite
dangerous.
,
then its relative error can become arbitrarily big. One has to avoid
these cases. Especially the subtraction operation can be quite
dangerous.
Example 12.1 Calculate the quantity  with approximations
with approximations  and
and  whose common absolute and relative error bounds are
whose common absolute and relative error bounds are  and
and  , respectively. One obtains the approximate value
, respectively. One obtains the approximate value  , whose relative error bound is
, whose relative error bound is
that is  . The true relative error is about
. The true relative error is about  . Yet it is too big, since it is approximately
. Yet it is too big, since it is approximately  times bigger than the relative error of the initial data. We can avoid the subtraction operation by using the following trick
times bigger than the relative error of the initial data. We can avoid the subtraction operation by using the following trick

Here the nominator is exact, while the absolute error of the denominator is  . Hence the relative error (bound) of the quotient is about
. Hence the relative error (bound) of the quotient is about  .
The latter result is in agreement with the relative error of the
initial data and it is substantially smaller than the one obtained with
direct subtraction operation.
.
The latter result is in agreement with the relative error of the
initial data and it is substantially smaller than the one obtained with
direct subtraction operation.
The first order error terms of twice differentiable functions can be obtained by their first order Taylor polynomial:
The numerical sensitivity of functions at a given point is characterised by the condition number, which is the ratio of the relative errors of approximate function value and the input data (the Jacobian matrix of functions  is denoted by
is denoted by  at the point
at the point  ):
):
We
can consider the condition number as the magnification number of the
input relative error. Therefore the functions is considered numerically stable (or well-conditioned) at the point  , if
, if  is “small”. Otherwise
is “small”. Otherwise  is considered as numerically unstable (ill-conditioned.) The condition number depends on the point
is considered as numerically unstable (ill-conditioned.) The condition number depends on the point  . A function can be well-conditioned at point
. A function can be well-conditioned at point  , while it is ill-conditioned at point
, while it is ill-conditioned at point  . The term “small” is relative. It depends on the problem, the computer and the required precision.
. The term “small” is relative. It depends on the problem, the computer and the required precision.
The condition number of matrices can be defined as the upper bound of a function condition number. Let us define the mapping  by the solution of the equation
by the solution of the equation  (
( ,
,  ), that is, let
), that is, let  . Then
. Then  and
and

The upper bound of the right side is called the condition number of the matrix  . This bound is sharp, since there exists a vector
. This bound is sharp, since there exists a vector  such that
such that  .
.
Let us investigate the calculation of the function value  . If we calculate the approximation
. If we calculate the approximation  instead of the exact value
instead of the exact value  , then the forward error
, then the forward error  . If for a value
. If for a value  the equality
the equality  holds, that is,
holds, that is,  is the exact function value of the perturbed input data
is the exact function value of the perturbed input data  , then
, then  is called the backward error. The connection of the two concepts is shown on the Figure 12.1.
is called the backward error. The connection of the two concepts is shown on the Figure 12.1.
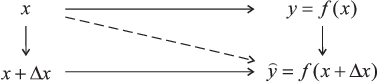
The
continuous line shows exact value, while the dashed one indicates
computed value. The analysis of the backward error is called the backward error analysis. If there exist more than one backward error, then the estimation of the smallest one is the most important.
An algorithm for computing the value  is called backward stable, if for any
is called backward stable, if for any  it gives a computed value
it gives a computed value  with small backward error
with small backward error  . Again, the term “small” is relative to the problem environment.
. Again, the term “small” is relative to the problem environment.
The connection of the forward and backward errors is described by the approximate thumb rule

which means that

This inequality indicates that the computed solution of an ill-conditioned problem may have a big relative forward error. An algorithm is said to be forward stable if the forward error is small. A forward stable method is not necessarily backward stable. If the forward error and the condition number are small, then the algorithm is forward stable.
Example 12.2 Consider the function  the condition number of which is
the condition number of which is  . For
. For  the condition number
the condition number  is big. Therefore the relative forward error is big for
is big. Therefore the relative forward error is big for  .
.
The classical error analysis investigates only the effects of the
input data errors and assumes exact arithmetic operations. The digital
computers however are representing the numbers with a finite number of
digits, the arithmetic computations are carried out on the elements of
a finite set  of such numbers and the results of operations belong to
of such numbers and the results of operations belong to  .
Hence the computer representation of the numbers may add further errors
to the input data and the results of arithmetic operations may also be
subject to further rounding. If the result of operation belongs to
.
Hence the computer representation of the numbers may add further errors
to the input data and the results of arithmetic operations may also be
subject to further rounding. If the result of operation belongs to  , then we have the exact result. Otherwise we have three cases:
, then we have the exact result. Otherwise we have three cases:
(i) rounding to representable (nonzero) number;
(ii) underflow (rounding to  );
);
(iii) overflow (in case of results whose moduli too large).
The most of the scientific-engineering calculations are done in floating point arithmetic whose generally accepted model is the following:
Definition 12.1 The set of floating point numbers is given by

where
–  is the base (or radix) of the number system,
is the base (or radix) of the number system,
–  is the mantissa in the number system with base
is the mantissa in the number system with base  ,
,
–  is the exponent,
is the exponent,
–  is the length of mantissa (the precision of arithmetic),
is the length of mantissa (the precision of arithmetic),
–  is the smallest exponent (underflow exponent),
is the smallest exponent (underflow exponent),
–  is the biggest exponent (overflow exponent).
is the biggest exponent (overflow exponent).
The parameters of the three most often used number systems are indicated in the following table
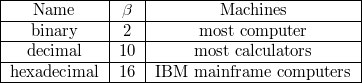
The mantissa can be written in the form

We can observe that condition  implies the inequality
implies the inequality  for the first digit
for the first digit  . The remaining digits must satisfy
. The remaining digits must satisfy  (
( ). Such arithmetic systems are called normalized. The zero digit and the dot is not represented. If
). Such arithmetic systems are called normalized. The zero digit and the dot is not represented. If  , then the first digit is
, then the first digit is  , which is also unrepresented. Using the representation (12.2) we can give the set
, which is also unrepresented. Using the representation (12.2) we can give the set  in the form
in the form

where  and
and  .
.
Example 12.3 The set  contains
contains  elements and its positive elements are given by
elements and its positive elements are given by

The elements of  are not equally distributed on the real line. The distance of two consecutive numbers in
are not equally distributed on the real line. The distance of two consecutive numbers in  is
is  . Since the elements of
. Since the elements of  are of the form
are of the form  , the distance of two consecutive numbers in
, the distance of two consecutive numbers in  is changing with the exponent. The maximum distance of two consecutive floating point numbers is
is changing with the exponent. The maximum distance of two consecutive floating point numbers is  , while the minimum distance is
, while the minimum distance is  .
.
For the mantissa we have  , since
, since

Using this observation we can easily prove the following result on the range of floating point numbers.
Theorem 12.2 If  ,
,  , then
, then  , where
, where

Let  and denote
and denote  any of the four arithmetic operations
any of the four arithmetic operations  . The following cases are possible:
. The following cases are possible:
(1)  (exact result),
(exact result),
(2)  (arithmetic overflow),
(arithmetic overflow),
(3)  (arithmetic underflow),
(arithmetic underflow),
(4)  ,
,  (not representable result).
(not representable result).
In the last two cases the floating point arithmetic is rounding the result  to the nearest floating point number in
to the nearest floating point number in  . If two consecutive floating point numbers are equally distant from
. If two consecutive floating point numbers are equally distant from  , then we generally round to the greater number. For example, in a five digit decimal arithmetic, the number
, then we generally round to the greater number. For example, in a five digit decimal arithmetic, the number  is rounded to the number
is rounded to the number  .
.
Let  . It is clear that
. It is clear that  . Let
. Let  . The
. The  denotes an element of
denotes an element of  nearest to
nearest to  . The mapping
. The mapping  is called rounding. The quantity
is called rounding. The quantity  is called the rounding error. If
is called the rounding error. If  , then the rounding error is at most
, then the rounding error is at most  . The quantity
. The quantity  is called the unit roundoff. The quantity
is called the unit roundoff. The quantity  is the relative error bound of
is the relative error bound of  .
.
 , then
, then
Proof. Without loss of generality we can assume that  . Let
. Let  ,
,  be two consecutive numbers such that
be two consecutive numbers such that

Either  or
or  holds. Since
holds. Since  holds in both cases, we have
holds in both cases, we have

either  or
or  . It follows that
. It follows that

Hence  , where
, where  . A simple arrangement yields
. A simple arrangement yields

Since  , we proved the claim.
, we proved the claim.
Thus we proved that the relative error of the rounding is bounded in
floating point arithmetic and the bound is the unit roundoff  .
.
Another quantity used to measure the rounding errors is the so called the machine epsilon  (
( ). The number
). The number  is the distance of
is the distance of  and its nearest neighbour greater than
and its nearest neighbour greater than  . The following algorithm determines
. The following algorithm determines  in the case of binary base.
in the case of binary base.
Machine-Epsilon
12
WHILE3
DO4
5
RETURN
In the MATLAB system  .
.
For the results of floating point arithmetic operations we assume the following (standard model):

The IEEE arithmetic standard satisfies this assumption. It is an important consequence of the assumption that for  the relative error of arithmetic operations satisfies
the relative error of arithmetic operations satisfies
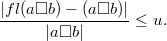
Hence the relative error of the floating point arithmetic operations is small.
There exist computer floating point arithmetics that do not comply with the standard model (12.4).
The usual reason for this is that the arithmetic lacks a guard digit in
subtraction. For simplicity we investigate the subtraction  in a three digit binary arithmetic. In the first step we equate the exponents:
in a three digit binary arithmetic. In the first step we equate the exponents:

If the computation is done with four digits, the result is the following
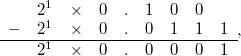
from which the normalized result is  .
Observe that the subtracted number is unnormalised. The temporary
fourth digit of the mantissa is called a guard digit. Without a guard
digit the computations are the following:
.
Observe that the subtracted number is unnormalised. The temporary
fourth digit of the mantissa is called a guard digit. Without a guard
digit the computations are the following:
Hence the normalized result is  with a relative error of
with a relative error of  . Several CRAY computers and pocket calculators lack guard digits.
. Several CRAY computers and pocket calculators lack guard digits.
Without the guard digit the floating point arithmetic operations satisfy only the weaker conditions


Assume that we have a guard digit and the arithmetic complies with standard model (12.4). Introduce the following notations:



The following results hold:




where  denotes the error (matrix) of the actual operation.
denotes the error (matrix) of the actual operation.
The standard floating point arithmetics have many special properties. It is an important property that the addition is not associative because of the rounding.
Example 12.4 If  ,
,  , then using MATLAB and AT386 type PC we obtain
, then using MATLAB and AT386 type PC we obtain

We can have a similar result on Pentium1 machine with the choice  .
.
The example also indicates that for different (numerical) processors
may produce different computational results for the same calculations.
The commutativity can also be lost in addition. Consider the
computation of the sum  . The usual algorithm is the recursive summation.
. The usual algorithm is the recursive summation.
Recursive-Summation(
)
12
FORto
3
DO4
RETURN
for  . The recursive summation algorithm (and MATLAB) gives the result
. The recursive summation algorithm (and MATLAB) gives the result

If the summation is done in the reverse (increasing) order, then the result is

If the two values are compared with the exact result  ,
then we can see that the second summation gives better result. In this
case the sum of smaller numbers gives significant digits to the final
result unlike in the first case.
,
then we can see that the second summation gives better result. In this
case the sum of smaller numbers gives significant digits to the final
result unlike in the first case.
The last example indicates that the summation of a large number of data varying in modulus and sign is a complicated task. The following algorithm of W. Kahan is one of the most interesting procedures to solve the problem.
Compensated-Summation(
)
12
3
FOR
TO4
DO5
6
7
8
RETURN
The ANSI/IEEE Standard 754-1985 of a binary ( ) floating point arithmetic system
was published in 1985. The standard specifies the basic arithmetic
operations, comparisons, rounding modes, the arithmetic exceptions and
their handling, and conversion between the different arithmetic
formats. The square root is included as a basic operation. The standard
does not deal with the exponential and transcendent functions. The
standard defines two main floating point formats:
) floating point arithmetic system
was published in 1985. The standard specifies the basic arithmetic
operations, comparisons, rounding modes, the arithmetic exceptions and
their handling, and conversion between the different arithmetic
formats. The square root is included as a basic operation. The standard
does not deal with the exponential and transcendent functions. The
standard defines two main floating point formats:

In both formats one bit is reserved as a sign bit. Since the
floating point numbers are normalized and the first digit is always  , this bit is not stored. This hidden bit is denoted by the “
, this bit is not stored. This hidden bit is denoted by the “  ” in the table.
” in the table.
The arithmetic standard contains the handling of arithmetic exceptions.
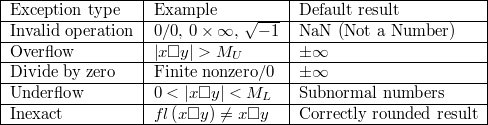
(The numbers of the form  ,
,  are called subnormal numbers.)
The IEEE arithmetic is a closed system. Every arithmetic operations has
a result, whether it is expected mathematically or not. The exceptional
operations raise a signal and continue. The arithmetic standard
conforms with the standard model (12.4).
are called subnormal numbers.)
The IEEE arithmetic is a closed system. Every arithmetic operations has
a result, whether it is expected mathematically or not. The exceptional
operations raise a signal and continue. The arithmetic standard
conforms with the standard model (12.4).
The first hardware implementation of the IEEE standard was the Intel 8087 mathematical coprocessor. Since then it is generally accepted and used.
Remark. In the single
precision we have about 7 significant digit precision in the decimal
system. For double precision we have approximately 16 digit precision
in decimals. There also exists an extended precision format of 80 bits,
where  and the exponential has
and the exponential has  bits.
bits.
Exercises
12.1-1 The measured values of two resistors are  and
and  . We connect the two resistors parallel and obtain the circuit resistance
. We connect the two resistors parallel and obtain the circuit resistance  . Calculate the relative error bounds of the initial data and the approximate value of the resistance
. Calculate the relative error bounds of the initial data and the approximate value of the resistance  . Evaluate the absolute and relative error bounds
. Evaluate the absolute and relative error bounds  and
and  , respectively in the following three ways:
, respectively in the following three ways:
(i) Estimate first  using only the absolute error bounds of the input data, then estimate the relative error bound
using only the absolute error bounds of the input data, then estimate the relative error bound  .
.
(ii) Estimate first the relative error bound  using only the relative error bounds of the input data, then estimate the absolute error bound
using only the relative error bounds of the input data, then estimate the absolute error bound  .
.
(iii) Consider the circuit resistance as a two variable function  .
.
12.1-2 Assume that  is calculated with the absolute error bound
is calculated with the absolute error bound  . The following two expressions are theoretically equal:
. The following two expressions are theoretically equal:
(i) 
(ii)  .
.
Which expression can be calculated with less relative error and why?
12.1-3 Consider the arithmetic operations as two variable functions of the form  , where
, where  .
.
(i) Derive the error bounds of the arithmetic operations from the error formula of two variable functions.
(ii) Derive the condition numbers of these functions. When are they ill-conditioned?
(iii) Derive error bounds for the power function assuming that both the base and the exponent have errors. What is the result if the exponent is exact?
(iv) Let  ,
,  and
and  . Determine the smallest and the greatest value of
. Determine the smallest and the greatest value of  as a function of
as a function of  such that the relative error bound of
such that the relative error bound of  should be at most
should be at most  .
.
12.1-4 Assume that the number  (
( )
is calculated in a 24 bit long mantissa and the exponential function is
also calculated with 24 significant bits. Estimate the absolute error of the result. Estimate the relative error without using the actual value of
)
is calculated in a 24 bit long mantissa and the exponential function is
also calculated with 24 significant bits. Estimate the absolute error of the result. Estimate the relative error without using the actual value of  .
.
12.1-5 Consider the floating point number set  and show that
and show that
(i) Every arithmetic operation can result arithmetic overflow;
(ii) Every arithmetic operation can result arithmetic underflow.
12.1-6 Show that the following expressions are numerically unstable for  :
:
(i) 
(ii)  ;
;
(iii)  .
.
Calculate the values of the above expressions for  and estimate the error. Manipulate the expressions into numerically stable ones and estimate the error as well.
and estimate the error. Manipulate the expressions into numerically stable ones and estimate the error as well.
12.1-7 How many elements does the set  have? How many subnormal numbers can we find?
have? How many subnormal numbers can we find?
12.1-8 If  , then
, then  and equality holds if and only if
and equality holds if and only if  .
Is it true numerically? Check the inequality experimentally for various
data (small and large numbers, numbers close to each other or different
in magnitude).
.
Is it true numerically? Check the inequality experimentally for various
data (small and large numbers, numbers close to each other or different
in magnitude).
The general form of linear algebraic systems with  unknowns and
unknowns and  equations is given by
equations is given by

This system can be written in the more compact form

where

The systems is called underdetermined if  . For
. For  , the systems is called overdetermined. Here we investigate only the case
, the systems is called overdetermined. Here we investigate only the case  , when the coefficient matrix
, when the coefficient matrix  is square. We also assume that the inverse matrix
is square. We also assume that the inverse matrix  exists (or equivalently
exists (or equivalently  ). Under this assumption the linear system
). Under this assumption the linear system  has exactly one solution:
has exactly one solution:  .
.
Definition 12.4 The matrix  is upper triangular if
is upper triangular if  for all
for all  . The matrix
. The matrix  is lower triangular if
is lower triangular if  for all
for all  .
.
For example the general form of the upper triangular matrices is the following:
We note that the diagonal matrices are both lower and upper triangular. It is easy to show that  holds for the upper or lower triangular matrices. It is easy to solve
linear systems with triangular coefficient matrices. Consider the
following upper triangular linear system:
holds for the upper or lower triangular matrices. It is easy to solve
linear systems with triangular coefficient matrices. Consider the
following upper triangular linear system:
This can be solved by the so called back substitution algorithm.
Back-Substitution(
)
12
FOR
DOWNTO3
DO4
RETURN
The solution of lower triangular systems is similar.
The Gauss method. The Gauss method or Gaussian elimination (GE) consists of two phases:
I. The linear system  is transformed to an equivalent upper triangular system using elementary operations (see Figure 12.2).
is transformed to an equivalent upper triangular system using elementary operations (see Figure 12.2).

II. The obtained upper triangular system is then solved by the back substitution algorithm.
The first phase is often called the elimination or forward phase. The second phase of GE is called the backward phase. The elementary operations are of the following three types:
1. Add a multiple of one equation to another equation.
2. Interchange two equations.
3. Multiply an equation by a nonzero constant.
The elimination phase of GE is based on the following observation. Multiply equation  by
by  and subtract it from equation
and subtract it from equation  :
:

If  , then by choosing
, then by choosing  , the coefficient of
, the coefficient of  becomes
becomes  in the new equivalent equation, which replaces equation
in the new equivalent equation, which replaces equation  . Thus we can eliminate variable
. Thus we can eliminate variable  (or coefficient
(or coefficient  ) from equation
) from equation  .
.
The Gauss method eliminates the coefficients (variables) under the main diagonal of  in a systematic way. First variable
in a systematic way. First variable  is eliminated from equations
is eliminated from equations  using equation
using equation  , then
, then  is eliminated from equations
is eliminated from equations  using equation
using equation  , and so on.
, and so on.
Assume that the unknowns are eliminated in the first  columns under the main diagonal and the resulting linear system has the form
columns under the main diagonal and the resulting linear system has the form
If  , then multiplying row
, then multiplying row  by
by  and subtracting it from equation
and subtracting it from equation  we obtain
we obtain

Since  for
for  , we eliminated the coefficient
, we eliminated the coefficient  (variable
(variable  ) from equation
) from equation  . Repeating this process for
. Repeating this process for  we can eliminate the coefficients under the main diagonal entry
we can eliminate the coefficients under the main diagonal entry  . Next we denote by
. Next we denote by  the element
the element  of matrix
of matrix  and by
and by  the vector
the vector  . The Gauss method has the following form (where the pivoting discussed later is also included):
. The Gauss method has the following form (where the pivoting discussed later is also included):
Gauss-Method(
)
1Forward phase: 2
3
FOR
TO4
DO{pivoting and interchange of rows and columns} 5FOR
TO6
DO7
8
9
Backward phase: see the back substitution algorithm. 10
RETURN
The algorithm overwrites the original matrix  and vector
and vector  .
It does not write however the zero entries under the main diagonal
since these elements are not necessary for the second phase of the
algorithm. Hence the lower triangular part of matrix
.
It does not write however the zero entries under the main diagonal
since these elements are not necessary for the second phase of the
algorithm. Hence the lower triangular part of matrix  can be used to store information for the
can be used to store information for the  decomposition of matrix
decomposition of matrix  .
.
The above version of the Gauss method can be performed only if the elements  occurring in the computation are not zero. For this and numerical stability reasons we use the Gaussian elimination with pivoting.
occurring in the computation are not zero. For this and numerical stability reasons we use the Gaussian elimination with pivoting.
If  , then we can interchange row
, then we can interchange row  with another row, say
with another row, say  , so that the new entry (
, so that the new entry ( ) at position
) at position  should be nonzero. If this is not possible, then all the coefficients
should be nonzero. If this is not possible, then all the coefficients  are zero and
are zero and  . In the latter case
. In the latter case  has no unique solution. The element
has no unique solution. The element  is called the
is called the  pivot element.
We can always select new pivot elements by interchanging the rows. The
selection of the pivot element has a great influence on the reliability
of the computed results. The simple fact that we divide by the pivot
element indicates this influence. We recall that
pivot element.
We can always select new pivot elements by interchanging the rows. The
selection of the pivot element has a great influence on the reliability
of the computed results. The simple fact that we divide by the pivot
element indicates this influence. We recall that  is proportional to
is proportional to  .
It is considered advantageous if the pivot element is selected so that
it has the greatest possible modulus. The process of selecting the
pivot element is called pivoting. We mention the following two pivoting processes.
.
It is considered advantageous if the pivot element is selected so that
it has the greatest possible modulus. The process of selecting the
pivot element is called pivoting. We mention the following two pivoting processes.
Partial pivoting: At the  step, interchange the rows of the matrix so the largest remaining element, say
step, interchange the rows of the matrix so the largest remaining element, say  , in the
, in the  column is used as pivot. After the pivoting we have
column is used as pivot. After the pivoting we have

Complete pivoting: At the  step, interchange both the rows and columns of the matrix so that the largest element, say
step, interchange both the rows and columns of the matrix so that the largest element, say  , in the remaining matrix is used as pivot After the pivoting we have
, in the remaining matrix is used as pivot After the pivoting we have

Note that the interchange of two columns implies the interchange of the corresponding unknowns. The significance of pivoting is well illustrated by the following
Example 12.6 The exact solution of the linear system
is  and
and  . The MATLAB program gives the result
. The MATLAB program gives the result  ,
,  and this is the best available result in standard double precision
arithmetic. Solving this system with the Gaussian elimination without
pivoting (also in double precision) we obtain the catastrophic result
and this is the best available result in standard double precision
arithmetic. Solving this system with the Gaussian elimination without
pivoting (also in double precision) we obtain the catastrophic result  and
and  . Using partial pivoting with the Gaussian elimination we obtain the best available numerical result
. Using partial pivoting with the Gaussian elimination we obtain the best available numerical result  .
.
Remark 12.5 Theoretically we do not need pivoting in the following cases: 1. If  is symmetric and positive definite (
is symmetric and positive definite ( is positive definite
is positive definite  ,
,  ,
,  ). 2. If
). 2. If  is diagonally dominant in the following sense:
is diagonally dominant in the following sense:

In case of symmetric and positive definite matrices we use the Cholesky method which is a special version of the Gauss-type methods.
During the Gaussian elimination we obtain a sequence of equivalent linear systems

where

Note that matrices  are stored in the place of
are stored in the place of  . The last coefficient matrix of phase I has the form
. The last coefficient matrix of phase I has the form
where  is the
is the  pivot element. The growth factor of pivot elements is given by
pivot element. The growth factor of pivot elements is given by

Wilkinson proved that the error of the computed solution is proportional to the growth factor  and the bounds
and the bounds

and

hold for complete and partial pivoting, respectively. Wilkinson conjectured that  for complete pivoting. This has been proved by researchers for small values of
for complete pivoting. This has been proved by researchers for small values of  . Statistical investigations on random matrices (
. Statistical investigations on random matrices ( ) indicate that the average of
) indicate that the average of  is
is  for the partial pivoting and
for the partial pivoting and  for the complete pivoting. Hence the case
for the complete pivoting. Hence the case  hardly occurs in the statistical sense.
hardly occurs in the statistical sense.
We remark that Wilkinson constructed a linear system on which  for the partial pivoting. Hence Wilkinson's bound for
for the partial pivoting. Hence Wilkinson's bound for  is sharp in the case of partial pivoting. There also exist examples of
linear systems concerning discretisations of differential and integral
equations, where
is sharp in the case of partial pivoting. There also exist examples of
linear systems concerning discretisations of differential and integral
equations, where  is increasing exponentially if Gaussian elimination is used with partial pivoting.
is increasing exponentially if Gaussian elimination is used with partial pivoting.
The growth factor  can be very large, if the Gaussian elimination is used without pivoting. For example,
can be very large, if the Gaussian elimination is used without pivoting. For example,  , if
, if
Operations counts. The Gauss method gives the solution of the linear system  (
( ) in a finite number of steps and arithmetic operations
) in a finite number of steps and arithmetic operations  .
The amount of necessary arithmetic operations is an important
characteristic of the direct linear system solvers, since the CPU time
is largely proportional to the number of arithmetic operations. It was
also observed that the number of additive and multiplicative operations
are nearly the same in the numerical algorithms of linear algebra. For
measuring the cost of such algorithms C. B. Moler introduced the
concept of flop.
.
The amount of necessary arithmetic operations is an important
characteristic of the direct linear system solvers, since the CPU time
is largely proportional to the number of arithmetic operations. It was
also observed that the number of additive and multiplicative operations
are nearly the same in the numerical algorithms of linear algebra. For
measuring the cost of such algorithms C. B. Moler introduced the
concept of flop.
Definition 12.6 (One (old) flop) is the computational work necessary for the operation  (1 addition + 1 multiplication). One (new) flop is the computational work necessary for any of the arithmetic operations
(1 addition + 1 multiplication). One (new) flop is the computational work necessary for any of the arithmetic operations  .
.
The new flop can be used if the computational time of additive and multiplicative operations are approximately the same. Two new flops equals to one old flop. Here we use the notion of old flop.
For the Gauss method a simple counting gives the number of additive and multiplicative operations.
Theorem 12.7 The computational cost of the Gauss method is  flops.
flops.
V. V. Klyuyev and N. Kokovkin-Shcherbak proved that if only
elementary row and column operations (multiplication of row or column
by a number, interchange of rows or columns, addition of a multiple of
row or column to another row or column) are allowed, then the linear
system  cannot be solved in less than
cannot be solved in less than  flops.
flops.
Using fast matrix inversion procedures we can solve the  linear system
linear system  in
in  flops. These theoretically interesting algorithms are not used in practice since they are considered as numerically unstable.
flops. These theoretically interesting algorithms are not used in practice since they are considered as numerically unstable.
The  -decomposition.
In many cases it is easier to solve a linear system if the coefficient
matrix can be decomposed into the product of two triangular matrices.
-decomposition.
In many cases it is easier to solve a linear system if the coefficient
matrix can be decomposed into the product of two triangular matrices.
Definition 12.8 The matrix  has an
has an  -decomposition, if
-decomposition, if  , where
, where  is lower and
is lower and  is upper triangular matrix.
is upper triangular matrix.
The  -decomposition is not unique. If a nonsingular matrix has an
-decomposition is not unique. If a nonsingular matrix has an  -decomposition, then it has a particular
-decomposition, then it has a particular  -decomposition, where the main diagonal of a given component matrix consists of
-decomposition, where the main diagonal of a given component matrix consists of  's. Such triangular matrices are called unit (upper or lower) triangular matrices. The
's. Such triangular matrices are called unit (upper or lower) triangular matrices. The  decomposition is unique, if
decomposition is unique, if  is set to be lower unit triangular or
is set to be lower unit triangular or  is set to be unit upper triangular.
is set to be unit upper triangular.
The  -decomposition of nonsingular matrices is closely related to the Gaussian elimination method. If
-decomposition of nonsingular matrices is closely related to the Gaussian elimination method. If  , where
, where  is unit lower triangular, then
is unit lower triangular, then  (
( ), where
), where  is given by the Gauss algorithm. The matrix
is given by the Gauss algorithm. The matrix  is the upper triangular part of the matrix we obtain at the end of the forward phase. The matrix
is the upper triangular part of the matrix we obtain at the end of the forward phase. The matrix  can also be derived from this matrix, if the columns of the lower
triangular part are divided by the corresponding main diagonal
elements. We remind that the first phase of the Gaussian elimination
does not annihilate the matrix elements under the main diagonal. It is
clear that a nonsingular matrix has
can also be derived from this matrix, if the columns of the lower
triangular part are divided by the corresponding main diagonal
elements. We remind that the first phase of the Gaussian elimination
does not annihilate the matrix elements under the main diagonal. It is
clear that a nonsingular matrix has  -decomposition if and only if
-decomposition if and only if  holds for each pivot element for the Gauss method without pivoting.
holds for each pivot element for the Gauss method without pivoting.
Definition 12.9 A matrix  whose every row and column has one and only one non-zero element, that element being
whose every row and column has one and only one non-zero element, that element being  , is called a permutation matrix.
, is called a permutation matrix.
In case of partial pivoting we permute the rows of the coefficient matrix (multiply  by a permutation matrix on the left) so that
by a permutation matrix on the left) so that 
 holds for a nonsingular matrix. Hence we have
holds for a nonsingular matrix. Hence we have
Theorem 12.10 If  is nonsingular then there exists a permutation matrix
is nonsingular then there exists a permutation matrix  such that
such that  has an
has an  -decomposition.
-decomposition.
The the algorithm of  -decomposition
is essentially the Gaussian elimination method. If pivoting is used
then the interchange of rows must also be executed on the elements
under the main diagonal and the permutation matrix
-decomposition
is essentially the Gaussian elimination method. If pivoting is used
then the interchange of rows must also be executed on the elements
under the main diagonal and the permutation matrix  must be recorded. A vector containing the actual order of the original matrix rows is obviously sufficient for this purpose.
must be recorded. A vector containing the actual order of the original matrix rows is obviously sufficient for this purpose.
The  - and Cholesky-methods. Let
- and Cholesky-methods. Let  and consider the equation
and consider the equation  . Since
. Since  , we can decompose
, we can decompose  into the equivalent linear system
into the equivalent linear system  and
and  , where
, where  is lower triangular and
is lower triangular and  is upper triangular.
is upper triangular.
LU-Method(
)
1 Determine the-decomposition
. 2 Solve
. 3 Solve
. 4
RETURN
Remark. In case of partial pivoting we obtain the decomposition  and we set
and we set  instead of
instead of  .
.
In the first phase of the Gauss method we produce decomposition  and the equivalent linear system
and the equivalent linear system  with upper triangular coefficient matrix. The latter is solved in the second phase. In the
with upper triangular coefficient matrix. The latter is solved in the second phase. In the  -method we decompose the first phase of the Gauss method into two steps. In the first step we obtain only the decomposition
-method we decompose the first phase of the Gauss method into two steps. In the first step we obtain only the decomposition  . In the second step we produce the vector
. In the second step we produce the vector  . The third step of the algorithm is identical with the second phase of the original Gauss method.
. The third step of the algorithm is identical with the second phase of the original Gauss method.
The  -method is especially advantageous if we have to solve several linear systems with the same coefficient matrix:
-method is especially advantageous if we have to solve several linear systems with the same coefficient matrix:

In such a case we determine the  -decomposition of matrix
-decomposition of matrix  only once, and then we solve the linear systems
only once, and then we solve the linear systems  ,
,  (
( ,
,  ). The computational cost of this process is
). The computational cost of this process is  flops.
flops.
The inversion of a matrix  can be done as follows:
can be done as follows:
1. Determine the  -decomposition
-decomposition  . .
. .
2. Solve  ,
,  (
( is the
is the  unit vector
unit vector  ).
).
The inverse of  is given by
is given by  . The computational cost of the algorithm is
. The computational cost of the algorithm is  flops.
flops.
This implementation of the  -method is known since the 60's. Vector
-method is known since the 60's. Vector  contains the indices of the rows. At the start we set
contains the indices of the rows. At the start we set  (
( ). When exchanging rows we exchange only those components of vector
). When exchanging rows we exchange only those components of vector  that correspond to the rows.
that correspond to the rows.
LU-Method-with-Pointers(
)
12
3
FOR
TO4
DOcompute indexsuch that
. 5
IF6
THENexchange the componentsand
. 7
FOR
TO8
DO9

10
FOR
TO11
DO12
FOR
TO13
DO14
15
FOR
DOWNTO16
DO17
FOR
TO18
19
20
RETURN
If  is symmetric and positive definite, then it can be decomposed in the form
is symmetric and positive definite, then it can be decomposed in the form  , where
, where  is lower triangular matrix. The
is lower triangular matrix. The  -decomposition is called the Cholesky-decomposition. In this case we can save approximately half of the storage place for
-decomposition is called the Cholesky-decomposition. In this case we can save approximately half of the storage place for  and half of the computational cost of the
and half of the computational cost of the  -decomposition (
-decomposition ( -decomposition). Let
-decomposition). Let

Observing that only the first  elements may be nonzero in the
elements may be nonzero in the  column of
column of  we obtain that
we obtain that

This gives the formulae
Using the notation  (
( ) we can formulate the Cholesky-method as follows.
) we can formulate the Cholesky-method as follows.
Cholesky-Method(
)
12
FOR
TO3
DO4
FOR
TO5
DO6
RETURN
The lower triangular part of  contains
contains  . The computational cost of the algorithm is
. The computational cost of the algorithm is  flops and
flops and  square roots. The algorithm, which can be considered as a special case
of the Gauss-methods, does not require pivoting, at least in principle.
square roots. The algorithm, which can be considered as a special case
of the Gauss-methods, does not require pivoting, at least in principle.
It often happens that linear systems have banded coefficient matrices.
Definition 12.11 Matrix  is banded with lower bandwidth
is banded with lower bandwidth  and upper bandwidth
and upper bandwidth  if
if

The possibly non-zero elements  (
( ) form a band like structure. Schematically
) form a band like structure. Schematically  has the form
has the form
The banded matrices yield very efficient algorithms if  and
and  are significantly less than
are significantly less than  . If a banded matrix
. If a banded matrix  with lower bandwidth
with lower bandwidth  and upper bandwidth
and upper bandwidth  has an
has an  -decomposition, then both
-decomposition, then both  and
and  are banded with lower bandwidth
are banded with lower bandwidth  and upper bandwidth
and upper bandwidth  , respectively.
, respectively.
Next we give the  -method for banded matrices in three parts.
-method for banded matrices in three parts.
The-LU-Decomposition-of-Banded-Matrix(
)
1FOR
TO2
DOFOR
TO3
DO4
FOR
TO5
DO6
RETURN
Entry  is overwritten by
is overwritten by  , if
, if  and by
and by  , if
, if  . The computational cost of is
. The computational cost of is  flops, where
flops, where

The following algorithm overwrites  by the solution of equation
by the solution of equation  .
.
Solution-of-Banded-Unit-Lower-Triangular-System(
)
1FOR
TO2
DO3
RETURN
The total cost of the algorithm is  flops. The next algorithm overwrites vector
flops. The next algorithm overwrites vector  by the solution of
by the solution of  .
.
Solution-of-Banded-Upper-Triangular-System(
)
1FOR
DOWNTO2
DO3
RETURN
The computational cost is  flops.
flops.
Assume that  is symmetric, positive definite and banded with lower bandwidth
is symmetric, positive definite and banded with lower bandwidth  . The banded version of the Cholesky-methods is given by
. The banded version of the Cholesky-methods is given by
Cholesky-decomposition-of-Banded-Matrices(
)
1FOR
TO2
DOFOR
TO3
DO4
5
RETURN
The elements  are overwritten by
are overwritten by  (
( ). The total amount of work is given by
). The total amount of work is given by  flops és
flops és  square roots.
square roots.
Remark. If  has lower bandwidth
has lower bandwidth  and upper bandwidth
and upper bandwidth  and partial pivoting takes place, then the upper bandwidth of
and partial pivoting takes place, then the upper bandwidth of  increases up to
increases up to  .
.
There are several iterative methods for solving linear systems of algebraic equations. The best known iterative algorithms are the classical Jacobi-, the Gauss-Seidel- and the relaxation methods. The greatest advantage of these iterative algorithms is their easy implementation to large systems. At the same time they usually have slow convergence. However for parallel computers the multisplitting iterative algorithms seem to be efficient.
Consider the iteration

where  és
és  . It is known that
. It is known that  converges for all
converges for all  ,
,  if and only if the spectral radius of
if and only if the spectral radius of  satisfies
satisfies  (
( is an eigenvalue of
is an eigenvalue of  ). In case of convergence
). In case of convergence  , that is we obtain the solution of the equation
, that is we obtain the solution of the equation  . The speed of convergence depends on the spectral radius
. The speed of convergence depends on the spectral radius  . Smaller the spectral radius
. Smaller the spectral radius  , faster the convergence.
, faster the convergence.
Consider now the linear system

where  is nonsingular. The matrices
is nonsingular. The matrices  form a multisplitting of
form a multisplitting of  if
if
(i)  ,
,  ,
,
(ii)  is nonsingular,
is nonsingular,  ,
,
(iii)  is non-negative diagonal matrix,
is non-negative diagonal matrix,  ,
,
(iv)  .
.
Let  be a given initial vector. The multisplitting iterative method is the following.
be a given initial vector. The multisplitting iterative method is the following.
Multisplitting-Iteration(
)
12
WHILEexit condition =false3DO4
FOR
TO5
DO6
7
RETURN
It is easy to show that  and
and
Thus the condition of convergence is  . The multisplitting iteration is a true parallel algorithm because we can solve
. The multisplitting iteration is a true parallel algorithm because we can solve  linear systems parallel in each iteration (synchronised parallelism).
The bottleneck of the algorithm is the computation of iterate
linear systems parallel in each iteration (synchronised parallelism).
The bottleneck of the algorithm is the computation of iterate  .
.
The selection of matrices  and
and  is such that the solution of the linear system
is such that the solution of the linear system  should be cheap. Let
should be cheap. Let  be a partition of
be a partition of  , that is
, that is  ,
,  (
( ) and
) and  . Furthermore let
. Furthermore let  (
( ) be such that
) be such that  for at least one
for at least one  .
.
The non-overlapping block Jacobi splitting of  is given by
is given by
for  .
.
Define now the simple splitting

where  is nonsingular,
is nonsingular,

It can be shown that
holds for the non-overlapping block Jacobi multisplitting.
The overlapping block Jacobi multisplitting of  is defined by
is defined by
for  .
.
A nonsingular matrix  is called an
is called an  -matrix, if
-matrix, if  (
( ) and all the elements of
) and all the elements of  are nonnegative.
are nonnegative.
Theorem 12.12 Assume that  is nonsingular
is nonsingular  -matrix,
-matrix,  is a non-overlapping,
is a non-overlapping,  is an overlapping block Jacobi multisplitting of
is an overlapping block Jacobi multisplitting of  , where the weighting matrices
, where the weighting matrices  are the same. The we have
are the same. The we have
where  and
and  .
.
We can observe that both iteration procedures are convergent and the
convergence of the overlapping multisplitting is not slower than that
of the non-overlapping procedure. The theorem remains true if we use
block Gauss-Seidel multisplittings instead of the block Jacobi
multisplittings. In this case we replace the above defined matrices  and
and  with their lower triangular parts.
with their lower triangular parts.
The multisplitting algorithm has multi-stage and asynchronous variants as well.
We analyse the direct and inverse errors. We use the following notations and concepts. The exact (theoretical) solution of  is denoted by
is denoted by  , while any approximate solution is denoted by
, while any approximate solution is denoted by  . The direct error of the approximate solution is given by
. The direct error of the approximate solution is given by  . The quantity
. The quantity  is called the residual error. For the exact solution
is called the residual error. For the exact solution  , while for the approximate solution
, while for the approximate solution

We use various models to estimate the inverse error. In the most general case we assume that the computed solution  satisfies the linear system
satisfies the linear system  , where
, where  and
and  . The quantities
. The quantities  and
and  are called the inverse errors.
are called the inverse errors.
One has to distinguish between the sensitivity of the problem and the stability of the solution algorithm. By sensitivity of a problem we mean the sensitivity of the solution to changes in the input parameters (data). By the stability (or sensitivity) of an algorithm we mean the influence of computational errors on the computed solution. We measure the sensitivity of a problem or algorithm in various ways. One such characterization is the “condition number”, which compares the relative errors of the input and output values.
The following general principles are used when applying any algorithm:
- We use only stable or well-conditioned algorithms.
- We cannot solve an unstable (ill-posed or ill-conditioned) problem with a general purpose algorithm, in general.
Assume that we solve the perturbed equation

instead of the original  . Let
. Let  and investigate the difference of the two solutions.
and investigate the difference of the two solutions.
Theorem 12.13 If  is nonsingular and
is nonsingular and  , then
, then

where  is the condition number of
is the condition number of  .
.
Here we can see that the condition number of  may strongly influence the relative error of the perturbed solution
may strongly influence the relative error of the perturbed solution  . A linear algebraic system is said to be well-conditioned if
. A linear algebraic system is said to be well-conditioned if  is small, and ill-conditioned, if
is small, and ill-conditioned, if  is big. It is clear that the terms “small” and “big” are relative and
the condition number depends on the norm chosen. We identify the
applied norm if it is essential for some reason. For example
is big. It is clear that the terms “small” and “big” are relative and
the condition number depends on the norm chosen. We identify the
applied norm if it is essential for some reason. For example  . The next example gives possible geometric characterization of the condition number.
. The next example gives possible geometric characterization of the condition number.
Example 12.7 The linear system

is ill-conditioned ( ).
The two lines, whose meshpoint defines the system, are almost parallel.
Therefore if we perturb the right hand side, the new meshpoint of the
two lines will be far from the previous meshpoint.
).
The two lines, whose meshpoint defines the system, are almost parallel.
Therefore if we perturb the right hand side, the new meshpoint of the
two lines will be far from the previous meshpoint.
The inverse error is  in the sensitivity model under investigation. Theorem 12.13
gives an estimate of the direct error which conforms with the thumb
rule. It follows that we can expect a small relative error of the
perturbed solution
in the sensitivity model under investigation. Theorem 12.13
gives an estimate of the direct error which conforms with the thumb
rule. It follows that we can expect a small relative error of the
perturbed solution  , if the condition number of
, if the condition number of  is small.
is small.
Example 12.8 Consider the linear system  with
with

Let  . Then
. Then  and
and  , but
, but  .
.
Consider now the perturbed linear system

instead of  . It can be proved that for this perturbation model there exist more than one inverse errors “inverse error” among which
. It can be proved that for this perturbation model there exist more than one inverse errors “inverse error” among which  is the inverse error with minimal spectral norm, provided that
is the inverse error with minimal spectral norm, provided that  .
.
The following theorem establish that for small relative residual error the relative inverse error is also small.
Theorem 12.14 Assume that  is the approximate solution of
is the approximate solution of  ,
,  and
and  . If
. If  , the the matrix
, the the matrix  satisfies
satisfies  and
and  .
.
If the relative inverse error and the condition number of  are small, then the relative residual error is small.
are small, then the relative residual error is small.
Theorem 12.15 If  ,
,  ,
,  ,
,  and
and  , then
, then

If  is ill-conditioned, then Theorem 12.15 is not true.
is ill-conditioned, then Theorem 12.15 is not true.
Example 12.9 Let  ,
,  and
and  , (
, ( ). Then
). Then  and
and  . Let
. Let

Then  and
and  , which is not small.
, which is not small.
In the most general case we solve the perturbed equation

instead of  . The following general result holds.
. The following general result holds.
Theorem 12.16 If  is nonsingular,
is nonsingular,  and
and  , then
, then

This theorem implies the following “thumb rule”.
Thumb rule. Assume that  . If the entries of
. If the entries of  and
and  are accurate to about
are accurate to about  decimal places and
decimal places and  , where
, where  , then the entries of the computed solution are accurate to about
, then the entries of the computed solution are accurate to about  decimal places.
decimal places.
The assumption  of Theorem 12.16 guarantees that that matrix
of Theorem 12.16 guarantees that that matrix  is nonsingular. The inequality
is nonsingular. The inequality  is equivalent with the inequality
is equivalent with the inequality  and the distance of
and the distance of  from the nearest singular matrix is just
from the nearest singular matrix is just  . Thus we can give a new characterization of the condition number:
. Thus we can give a new characterization of the condition number:

Thus
if a matrix is ill-conditioned, then it is close to a singular matrix.
Earlier we defined the condition numbers of matrices as the condition
number of the mapping  .
.
Let us introduce the following definition.
Definition 12.17 A linear system solver is said to be weakly stable on a matrix class  , if for all well-conditioned
, if for all well-conditioned  and for all
and for all  , the computed solution
, the computed solution  of the linear system
of the linear system  has small relative error
has small relative error  .
.
Putting together Theorems 12.13–12.16 we obtain the following.
Theorem 12.18 (Bunch) A linear system solver is weakly stable on a matrix class  , if for all well-conditioned
, if for all well-conditioned  and for all
and for all  , the computed solution
, the computed solution  of the linear system
of the linear system  satisfies any of the following conditions:
satisfies any of the following conditions:
(1)  is small;
is small;
(2)  is small;
is small;
(3) There exists  such that
such that  and
and  are small.
are small.
The estimate of Theorem 12.16 can be used in practice if we know estimates of  and
and  . If no estimates are available, then we can only make a posteriori error estimates.
. If no estimates are available, then we can only make a posteriori error estimates.
In the following we study the componentwise error estimates. We first give an estimate for the absolute error of the approximate solution using the components of the inverse error.
Theorem 12.19 (Bauer, Skeel) Let  be nonsingular and assume that the approximate solution
be nonsingular and assume that the approximate solution  of
of  satisfies the linear system
satisfies the linear system  . If
. If  ,
,  and
and  are such that
are such that  ,
,  ,
,  ,
,  and
and  , then
, then

If  (
( ),
),  and
and

then we obtain the estimate

The quantity  is said to be Skeel-norm, although it is not a norm in the earlier defined sense. The Skeel-norm satisfies the inequality
is said to be Skeel-norm, although it is not a norm in the earlier defined sense. The Skeel-norm satisfies the inequality

Therefore the above estimate is not worse than the traditional one that uses the standard condition number.
The inverse error can be estimated componentwise by the following result of Oettli and Prager. Let  and
and  . Assume that
. Assume that  and
and  . Furthermore let
. Furthermore let

Theorem 12.20 (Oettli, Prager) The computed solution  satisfies a perturbed equation
satisfies a perturbed equation  with
with  and
and  , if
, if

We do not need the condition number to apply this theorem. In practice the entries  and
and  are proportional to the machine epsilon.
are proportional to the machine epsilon.
Theorem 12.21 (Wilkinson) The approximate solution  of
of  obtained by the Gauss method in floating point arithmetic satisfies the perturbed linear equation
obtained by the Gauss method in floating point arithmetic satisfies the perturbed linear equation

with

where  denotes the groth factor of the pivot elements and
denotes the groth factor of the pivot elements and  is the unit roundoff.
is the unit roundoff.
Since  is small in practice, the relative error
is small in practice, the relative error
is also small. Therefore Theorem 12.18 implies that the Gauss method is weakly stable both for full and partial pivoting.
Wilkinson's theorem implies that

For a small condition number we can assume that  . Using Theorems 12.21 and 12.16 (case
. Using Theorems 12.21 and 12.16 (case  ) we obtain the following estimate of the direct error:
) we obtain the following estimate of the direct error:

The obtained result supports the thumb rule in the case of the Gauss method.
Example 12.10 Consider the following linear system whose coefficients can be represented exactly:

Here  is big, but
is big, but  is negligible. The exact solution of the problem is
is negligible. The exact solution of the problem is  ,
,  . The MATLAB gives the approximate solution
. The MATLAB gives the approximate solution  ,
,  with the relative error
with the relative error
Since  and
and  , the result essentially corresponds to the Wilkinson theorem or the thumb rule. The Wilkinson theorem gives the bound
, the result essentially corresponds to the Wilkinson theorem or the thumb rule. The Wilkinson theorem gives the bound

for the inverse error. If we use the Oettli-Prager theorem with the choice  and
and  , then we obtain the estimate
, then we obtain the estimate  . Since
. Since  , this estimate is better than that of Wilkinson.
, this estimate is better than that of Wilkinson.
Scaling and preconditioning. Several matrices that occur in applications are ill-conditioned if their order  is large. For example the famous Hilbert-matrix
is large. For example the famous Hilbert-matrix

has  , if
, if  . There exist
. There exist  matrices with integer entries that can be represented exactly in
standard IEEE754 floating point arithmetic while their condition number
is approximately
matrices with integer entries that can be represented exactly in
standard IEEE754 floating point arithmetic while their condition number
is approximately  .
.
We have two main techniques to solve linear systems with large condition numbers. Either we use multiple precision arithmetic or decrease the condition number. There are two known forms of decreasing the condition number.
1. Scaling. We replace the linear system  with the equation
with the equation

where  and
and  are diagonal matrices.
are diagonal matrices.
We apply the Gauss method to this scaled system and get the solution  . The quantity
. The quantity  defines the requested solution. If the condition number of the matrix
defines the requested solution. If the condition number of the matrix  is smaller then we expect a smaller error in
is smaller then we expect a smaller error in  and consequently in
and consequently in  . Various strategies are given to choose the scaling matrices
. Various strategies are given to choose the scaling matrices  and
and  . One of the best known strategies is the balancing which forces every column and row of
. One of the best known strategies is the balancing which forces every column and row of  to have approximately the same norm. For example, if
to have approximately the same norm. For example, if
where  is the
is the  row vector of
row vector of  , the Euclidean norms of the rows of
, the Euclidean norms of the rows of  will be
will be  and the estimate
and the estimate

holds with  . This means that
. This means that  optimally scales the rows of
optimally scales the rows of  in an approximate sense.
in an approximate sense.
The next example shows that the scaling may lead to bad results.
Example 12.11 Consider the matrix
for  . It is easy to show that
. It is easy to show that  . Let
. Let
Then the scaled matrix
has the condition number  , which a very large value for small
, which a very large value for small  .
.
2. Preconditioning. The preconditioning is very close to scaling. We rewrite the linear system  with the equivalent form
with the equivalent form

where matrix  is such that
is such that  is smaller and
is smaller and  is easily solvable.
is easily solvable.
The preconditioning is often used with iterative methods on linear systems with symmetric and positive definite matrices.
A posteriori error estimates.
The a posteriori estimate of the error of an approximate solution is
necessary to get some information on the reliability of the obtained
result. There are plenty of such estimates. Here we show three
estimates whose computational cost is  flops. This cost is acceptable when comparing to the cost of direct or iterative methods (
flops. This cost is acceptable when comparing to the cost of direct or iterative methods ( or
or  per iteration step).
per iteration step).
The estimate of the direct error with the residual error.
Theorem 12.22 (Auchmuty) Let  be the approximate solution of
be the approximate solution of  . Then
. Then
where  .
.
The error constant  depends on
depends on  and the direction of error vector
and the direction of error vector  . Furthermore
. Furthermore

The error constant  takes the upper value
takes the upper value  only in exceptional cases. The computational experiments indicate that the average value of
only in exceptional cases. The computational experiments indicate that the average value of  grows slowly with the order of
grows slowly with the order of  and it depends more strongly on
and it depends more strongly on  than the condition number of
than the condition number of  . The following experimental estimate
. The following experimental estimate

seems to hold with a high degree of probability.
The LINPACK estimate of  .
.
The famous LINPACK program package uses the following process to estimate  . We solve the linear systems
. We solve the linear systems  and
and  . Then the estimate of
. Then the estimate of  is given by
is given by

Since
we
can interpret the process as an application of the power method of the
eigenvalue problem. The estimate can be used with the  and
and  -norms. The entries of vector
-norms. The entries of vector  are
are  possibly with random signs.
possibly with random signs.
If the linear system  is solved by the
is solved by the  -method, then the solution of further linear systems costs
-method, then the solution of further linear systems costs  flops per system. Thus the total cost of the LINPACK estimate remains small. Having the estimate
flops per system. Thus the total cost of the LINPACK estimate remains small. Having the estimate  we can easily estimate
we can easily estimate  and the error of the approximate solution (cf. Theorem 12.16 or the thumb rule). We remark that several similar processes are known in the literature.
and the error of the approximate solution (cf. Theorem 12.16 or the thumb rule). We remark that several similar processes are known in the literature.
The Oettli-Prager estimate of the inverse error.
We use the Oettli-Prager theorem in the following form. Let  be the residual error,
be the residual error,  and
and  are given such that
are given such that  and
and  . Let
. Let
where  is set to
is set to  -nak,
-nak,  is set to
is set to  , if
, if  . Symbol
. Symbol  denotes the
denotes the  component of the vector
component of the vector  . If
. If  , then there exist a matrix
, then there exist a matrix  and a vector
and a vector  for which
for which

holds and

Moreover  is the smallest number for which
is the smallest number for which  and
and  exist with the above properties. The quantity
exist with the above properties. The quantity  measures the relative inverse error in terms of
measures the relative inverse error in terms of  and
and  . If for a given
. If for a given  ,
,  and
and  , the quantity
, the quantity  is small, then the perturbed problem (and its solution) are close to
the original problem (and its solution). In practice, the choice
is small, then the perturbed problem (and its solution) are close to
the original problem (and its solution). In practice, the choice  and
and  is preferred
is preferred
Denote by  the approximate solution of
the approximate solution of  and let
and let  be the residual error at the point
be the residual error at the point  . The precision of the approximate solution
. The precision of the approximate solution  can be improved with the following method.
can be improved with the following method.
Iterative-Refinement(
)
12
3
4
WHILE5
DO6 Compute the approximate solution
of
with the
-method. 7
8
9
RETURN
There are other variants of this process. We can use other linear solvers instead of the  -method.
-method.
Let  be the smallest bound of relative inverse error with
be the smallest bound of relative inverse error with

Furthermore let

Theorem 12.23 (Skeel) If  , then for sufficiently large
, then for sufficiently large  we have
we have

This result often holds after the first iteration, i.e. for  . Jankowski and Wozniakowski investigated the iterative refinement for any method
. Jankowski and Wozniakowski investigated the iterative refinement for any method  which produces an approximate solution
which produces an approximate solution  with relative error less than
with relative error less than  .
They showed that the iterative refinement improves the precision of the
approximate solution even in single precision arithmetic and makes
method
.
They showed that the iterative refinement improves the precision of the
approximate solution even in single precision arithmetic and makes
method  to be weakly stable.
to be weakly stable.
Exercises
12.2-1 Prove Theorem 12.7.
12.2-2 Consider the linear systems  and
and  , where
, where

and  . Which equation is more sensitive to the perturbation of
. Which equation is more sensitive to the perturbation of  ? What should be the relative error of
? What should be the relative error of  in the more sensitive equation in order to get the solutions of both equations with the same precision?
in the more sensitive equation in order to get the solutions of both equations with the same precision?
12.2-3 Let  ,
,  and
and

Solve the linear systems  for
for  . Explain the results.
. Explain the results.
12.2-4 Let  be a
be a  matrix and choose the band matrix consisting of the main and the neighbouring two subdiagonals of
matrix and choose the band matrix consisting of the main and the neighbouring two subdiagonals of  as a preconditioning matrix. How much does the condition number of
as a preconditioning matrix. How much does the condition number of  improves if (i)
improves if (i)  is a random matrix; (ii)
is a random matrix; (ii)  is a Hilbert matrix?
is a Hilbert matrix?
12.2-5 Let
and assume that  is the common error bound of every component of
is the common error bound of every component of  . Give the sharpest possible error bounds for the solution
. Give the sharpest possible error bounds for the solution  of the equation
of the equation  and for the sum
and for the sum  .
.
12.2-6 Consider the linear system  with the approximate solution
with the approximate solution  .
.
(i) Give an error bound for  , if
, if  holds exactly and both
holds exactly and both  and
and  is nonsingular.
is nonsingular.
(ii) Let
and consider the solution of  . Give (if possible) a relative error bound for the entries of
. Give (if possible) a relative error bound for the entries of  such that the integer part of every solution component remains constant within the range of this relative error bound.
such that the integer part of every solution component remains constant within the range of this relative error bound.
The set of complex  -vectors will be denoted by
-vectors will be denoted by  . Similarly,
. Similarly,  denotes the set of complex
denotes the set of complex  matrices.
matrices.
Definition 12.24 Let  be an arbitrary matrix. The number
be an arbitrary matrix. The number  is the eigenvalue of
is the eigenvalue of  if there is vector
if there is vector  (
( ) such that
) such that

Vector  is called the (right) eigenvector of
is called the (right) eigenvector of  that belongs to the eigenvalue
that belongs to the eigenvalue  .
.
Equation  can be written in the equivalent form
can be written in the equivalent form  , where
, where  is the unit matrix of appropriate size. The latter homogeneous linear system has a nonzero solution
is the unit matrix of appropriate size. The latter homogeneous linear system has a nonzero solution  if and only if
if and only if

Equation (12.38) is called the characteristic equation of matrix  . The roots of this equation are the eigenvalues of matrix
. The roots of this equation are the eigenvalues of matrix  . Expanding
. Expanding  we obtain a polynomial of degree
we obtain a polynomial of degree  :
:

This polynomial called the characteristic polynomial of  . It follows from the fundamental theorem of algebra that any matrix
. It follows from the fundamental theorem of algebra that any matrix  has exactly
has exactly  eigenvalues with multiplicities. The eigenvalues may be complex or
real. Therefore one needs to use complex arithmetic for eigenvalue
calculations. If the matrix is real and the computations are done in
real arithmetic, the complex eigenvalues and eigenvectors can be
determined only with special techniques.
eigenvalues with multiplicities. The eigenvalues may be complex or
real. Therefore one needs to use complex arithmetic for eigenvalue
calculations. If the matrix is real and the computations are done in
real arithmetic, the complex eigenvalues and eigenvectors can be
determined only with special techniques.
If  is an eigenvector,
is an eigenvector,  (
( ), then
), then  is also eigenvector. The number of linearly independent eigenvectors that belong to an eigenvalue
is also eigenvector. The number of linearly independent eigenvectors that belong to an eigenvalue  does not exceed the multiplicity of
does not exceed the multiplicity of  in the characteristic equation (12.38). The eigenvectors that belong to different eigenvalues are linearly independent.
in the characteristic equation (12.38). The eigenvectors that belong to different eigenvalues are linearly independent.
The following results give estimates for the size and location of the eigenvalues.
Theorem 12.25 Let  be any eigenvalue of matrix
be any eigenvalue of matrix  . The upper estimate
. The upper estimate  holds in any induced matrix norm.
holds in any induced matrix norm.
Theorem 12.26 (Gersgorin) Let  ,
,
and

Then for any eigenvalue  of
of  we have
we have  .
.
For certain matrices the solution of the characteristic equation (12.38) is very easy. For example, if  is a triangular matrix, then its eigenvalues are entries of the main
diagonal. In most cases however the computation of all eigenvalues and
eigenvectors is a very difficult task. Those transformations of
matrices that keeps the eigenvalues unchanged have practical
significance for this problem. Later we see that the eigenvalue problem
of transformed matrices is simpler.
is a triangular matrix, then its eigenvalues are entries of the main
diagonal. In most cases however the computation of all eigenvalues and
eigenvectors is a very difficult task. Those transformations of
matrices that keeps the eigenvalues unchanged have practical
significance for this problem. Later we see that the eigenvalue problem
of transformed matrices is simpler.
Definition 12.27 The matrices  are similar if there is a matrix
are similar if there is a matrix  such that
such that  . The mapping
. The mapping  is said to be similarity transformation of
is said to be similarity transformation of  .
.
Theorem 12.28 Assume that  . Then the eigenvalues of
. Then the eigenvalues of  and
and  are the same. If
are the same. If  is the eigenvector of
is the eigenvector of  , then
, then  is the eigenvector of
is the eigenvector of  .
.
Similar matrices have the same eigenvalues.
The difficulty of the eigenvalue problem also stems from the fact
that the eigenvalues and eigenvectors are very sensitive (unstable) to
changes in the matrix entries. The eigenvalues of  and the perturbed matrix
and the perturbed matrix  may differ from each other significantly. Besides the multiplicity of
the eigenvalues may also change under perturbation. The following
theorems and examples show the very sensitivity of the eigenvalue
problem.
may differ from each other significantly. Besides the multiplicity of
the eigenvalues may also change under perturbation. The following
theorems and examples show the very sensitivity of the eigenvalue
problem.
Theorem 12.29 (Ostrowski, Elsner) For every eigenvalue  of matrix
of matrix  there exists an eigenvalue
there exists an eigenvalue  of the perturbed matrix
of the perturbed matrix  such that
such that

We can observe that the eigenvalues are changing continuously and the size of change is proportional to the  root of
root of  .
.
Example 12.12 Consider the following perturbed Jordan matrix of the size  :
:
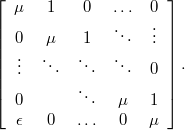
The characteristic equation is  , which gives the
, which gives the  different eigenvalues
different eigenvalues

instead of the original eigenvalue  with multiplicity
with multiplicity  . The size of change is
. The size of change is  , which corresponds to Theorem 12.29. If
, which corresponds to Theorem 12.29. If  ,
,  and
and  , then the perturbation size of the eigenvalues is
, then the perturbation size of the eigenvalues is  . This is a significant change relative to the input perturbation
. This is a significant change relative to the input perturbation  .
.
For special matrices and perturbations we may have much better perturbation bounds.
Theorem 12.30 (Bauer, Fike) Assume that  is diagonalisable, that is a matrix
is diagonalisable, that is a matrix  exists such that
exists such that  . Denote
. Denote  an eigenvalue of
an eigenvalue of  . Then
. Then

This result is better than that of Ostrowski and Elsner. Nevertheless  , which is generally unknown, can be very big.
, which is generally unknown, can be very big.
The eigenvalues are continuous functions of the matrix entries. This is also true for the normalized eigenvectors if the eigenvalues are simple. The following example shows that this property does not hold for multiple eigenvalues.

The eigenvalues of  are
are  and
and  . Vector
. Vector  is the eigenvector belonging to
is the eigenvector belonging to  . Vector
. Vector  is the eigenvector belonging to
is the eigenvector belonging to  . If
. If  , then
, then

while the eigenvectors do not have limit.
We study the numerical solution of the eigenvalue problem in the
next section. Unfortunately it is very difficult to estimate the
goodness of numerical approximations. From the fact that  holds with a certain error we cannot conclude anything in general.
holds with a certain error we cannot conclude anything in general.
Example 12.14 Consider the matrix
where  is small. The eigenvalues of
is small. The eigenvalues of  are
are  , while the corresponding eigenvectors are
, while the corresponding eigenvectors are  . Let
. Let  be an approximation of the eigenvalues and let
be an approximation of the eigenvalues and let  be the approximate eigenvector. Then
be the approximate eigenvector. Then
If  , then the residual error under estimate the true error
, then the residual error under estimate the true error  by five order.
by five order.
Remark 12.31 We can define the condition number of eigenvalues for simple eigenvalues:
where  and
and  are the right and left eigenvectors, respectively. For multiple eigenvalues the condition number is not finite.
are the right and left eigenvectors, respectively. For multiple eigenvalues the condition number is not finite.
We investigate only the real eigenvalues and eigenvectors of real matrices. The methods under consideration can be extended to the complex case with appropriate modifications.
The power method.
This method is due to von Mieses. Assume that  has exactly
has exactly  different real eigenvalues. Then the eigenvectors
different real eigenvalues. Then the eigenvectors  belonging to the corresponding eigenvalues
belonging to the corresponding eigenvalues  are linearly independent. Assume that the eigenvalues satisfy the condition
are linearly independent. Assume that the eigenvalues satisfy the condition

and let  be a given vector. This vector is a unique linear combination of the eigenvectors, that is
be a given vector. This vector is a unique linear combination of the eigenvectors, that is  . Assume that
. Assume that  and compute the sequence
and compute the sequence  (
( ). The initial assumptions imply that
). The initial assumptions imply that

Let  be an arbitrary vector such that
be an arbitrary vector such that  . Then
. Then

Given the initial vector  , the power method has the following form.
, the power method has the following form.
Power-Method(
)
12
WHILEexit condition = FALSE 3DO4
5 Select vector
such that
6
7
8
RETURN
It is clear that

The convergence  here means that
here means that  , that is the action line of
, that is the action line of  tends to the action line of
tends to the action line of  . There are various strategies to select
. There are various strategies to select  . We can select
. We can select  , where
, where  is defined by
is defined by  . If we select
. If we select  , then
, then  will be identical with the Rayleigh quotient
will be identical with the Rayleigh quotient  . This choice gives an approximation of
. This choice gives an approximation of  that have the minimal residual norm (Example 12.14 shows that this choice is not necessarily the best option).
that have the minimal residual norm (Example 12.14 shows that this choice is not necessarily the best option).
The speed of convergence depends on the quotient  . The method is very sensitive to the choice of the initial vector
. The method is very sensitive to the choice of the initial vector  . If
. If  , then the process does not converge to the dominant eigenvalue
, then the process does not converge to the dominant eigenvalue  . For certain matrix classes the power method converges with probability
. For certain matrix classes the power method converges with probability  if the initial vector
if the initial vector  is randomly chosen. In case of complex eigenvalues or multiple
is randomly chosen. In case of complex eigenvalues or multiple  we have to use modifications of the algorithm. The speed of convergence
can be accelerated if the method is applied to the shifted matrix
we have to use modifications of the algorithm. The speed of convergence
can be accelerated if the method is applied to the shifted matrix  , where
, where  is an appropriately chosen number. The shifted matrix
is an appropriately chosen number. The shifted matrix  has the eigenvalues
has the eigenvalues  and the corresponding convergence factor
and the corresponding convergence factor  . The latter quotient can be made smaller than
. The latter quotient can be made smaller than  with the proper selection of
with the proper selection of  .
.
The usual exit condition of the power method is

If we simultaneously apply the power method to the transposed matrix  and
and  , then the quantity
, then the quantity
gives an estimate for the condition number of  (see Remark 12.31). In such a case we use the exit condition
(see Remark 12.31). In such a case we use the exit condition

The
power method is very useful for large sparse matrices. It is often used
to determine the largest and the smallest eigenvalue. We can
approximate the smallest eigenvalue as follows. The eigenvalues of  are
are  . The eigenvalue
. The eigenvalue  will be the eigenvalue with the largest modulus. We can approximate this value by applying the power method to
will be the eigenvalue with the largest modulus. We can approximate this value by applying the power method to  . This requires only a small modification of the algorithm. We replace line 4. with the following:
. This requires only a small modification of the algorithm. We replace line 4. with the following:
Solve equation  for for  |
The modified algorithm is called the inverse power method. It is clear that  and
and  hold under appropriate conditions. If we use the
hold under appropriate conditions. If we use the  -method to solve
-method to solve  , we can avoid the inversion of
, we can avoid the inversion of  .
.
If the inverse power method is applied to the shifted matrix  , then the eigenvalues of
, then the eigenvalues of  are
are  . If
. If  approaches, say, to
approaches, say, to  , then
, then  . Hence the inequality
. Hence the inequality

holds for the eigenvalues of the shifted matrix. The speed of convergence is determined by the quotient

If  is close enough to
is close enough to  , then
, then  is very small and the inverse power iteration converges very fast. This
property can be exploited in the calculation of approximate
eigenvectors if an approximate eigenvalue, say
is very small and the inverse power iteration converges very fast. This
property can be exploited in the calculation of approximate
eigenvectors if an approximate eigenvalue, say  , is known. Assuming that
, is known. Assuming that  , we apply the inverse power method to the shifted matrix
, we apply the inverse power method to the shifted matrix  . In spite of the fact that matrix
. In spite of the fact that matrix  is nearly singular and the linear equation
is nearly singular and the linear equation  cannot be solved with high precision, the algorithm gives very often good approximations of the eigenvectors.
cannot be solved with high precision, the algorithm gives very often good approximations of the eigenvectors.
Finally we note that in principle the von Mieses method can be modified to determine all eigenvalues and eigenvectors.
We need the following definition and theorem.
Definition 12.32 The matrix  is said to be orthogonal if
is said to be orthogonal if  .
.
Theorem 12.33 ( -decomposition) Every matrix
-decomposition) Every matrix  having linearly independent column vectors can be decomposed in the product form
having linearly independent column vectors can be decomposed in the product form  , where
, where  is orthogonal and
is orthogonal and  is upper triangular matrix.
is upper triangular matrix.
We note that the  -decomposition can be applied for solving linear systems of equations, similarly to the
-decomposition can be applied for solving linear systems of equations, similarly to the  -decomposition. If the
-decomposition. If the  -decomposition of
-decomposition of  is known, then the equation
is known, then the equation  can be written in the equivalent form
can be written in the equivalent form  . Thus we have to solve only an upper triangular linear system.
. Thus we have to solve only an upper triangular linear system.
There are several methods to determine the  -decomposition of a matrix. In practice the Givens-, the Householder- and the MGS-methods are used.
-decomposition of a matrix. In practice the Givens-, the Householder- and the MGS-methods are used.
The MGS (Modified Gram-Schmidt) method is a stabilised, but
algebraically equivalent version of the classical Gram-Schmidt
orthogonalisation algorithm. The basic problem is the following: We
seek for an orthonormal basis  of the subspace
of the subspace

where  (
( ) are linearly independent vectors. That is we determine the linearly independent vectors
) are linearly independent vectors. That is we determine the linearly independent vectors  such that
such that

and

The basic idea of the classical Gram-Schmidt-method is the following:
Let  and
and  . Assume that vectors
. Assume that vectors  are already computed and orthonormal. Assume that vector
are already computed and orthonormal. Assume that vector  is such that
is such that  , that is
, that is  holds for
holds for  . Since
. Since  are orthonormal,
are orthonormal,  (
( ) and
) and  . After normalisation we obtain
. After normalisation we obtain  .
.
The algorithm is formalised as follows.
CGS-Orthogonalization(
)
1FOR
TO2
DOFOR
TO3
DO4
5
6
7
RETURN
The algorithm overwrites vectors  by the orthonormal vectors
by the orthonormal vectors  . The connection with the
. The connection with the  -decomposition follows from the relation
-decomposition follows from the relation  . Since
. Since
we can write that
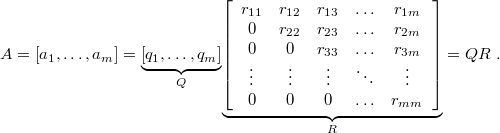
The numerically stable MGS method is given in the following form
MGS-Orthogonalisation(
)
1FOR
TO2
DO3
4
FOR
TO5
DO6
7
RETURN
The algorithm overwrites vectors  by the orthonormal vectors
by the orthonormal vectors  . The MGS method is more stable than the CGS algorithm. Björck proved that for
. The MGS method is more stable than the CGS algorithm. Björck proved that for  the computed matrix
the computed matrix  satisfies
satisfies

where  is the unit roundoff.
is the unit roundoff.
The  -method.
-method.
Today the  -method is the most important numerical algorithm to compute all eigenvalues of a general matrix. It can be shown that the
-method is the most important numerical algorithm to compute all eigenvalues of a general matrix. It can be shown that the  -method is a generalisation of the power method. The basic idea of the method is the following: Starting from
-method is a generalisation of the power method. The basic idea of the method is the following: Starting from  we compute the sequence
we compute the sequence  , where
, where  is orthogonal,
is orthogonal,  is orthogonally similar to
is orthogonally similar to  (
( ) and the lower triangular part of
) and the lower triangular part of  tends to a diagonal matrix, whose entries will be the eigenvalues of
tends to a diagonal matrix, whose entries will be the eigenvalues of  . Here
. Here  is the orthogonal factor of the
is the orthogonal factor of the  -decomposition
-decomposition  . Therefore
. Therefore  . The basic algorithm is given in the following form.
. The basic algorithm is given in the following form.
QR-Method(
)
12
3
WHILEexit condition = FALSE 4DOCompute the-decomposition
5
6
7
RETURN
The following result holds.
Theorem 12.34 (Parlett) If the matrix  is diagonalisable,
is diagonalisable,  , the eigenvalues satisfy
, the eigenvalues satisfy

and  has an
has an  -decomposition, then the lower triangular part of
-decomposition, then the lower triangular part of  converges to a diagonal matrix whose entries are the eigenvalues of
converges to a diagonal matrix whose entries are the eigenvalues of  .
.
In general, matrices  do not necessarily converge to a given matrix. If
do not necessarily converge to a given matrix. If  has
has  eigenvalues of the same modulus, the form of matrices
eigenvalues of the same modulus, the form of matrices  converge to the form
converge to the form
where the entries of the submatrix denoted by  do not converge. However the eigenvalues of this submatrix will
converge. This submatrix can be identified and properly handled. A real
matrix may have real and complex eigenvalues. If there is a complex
eigenvalues, than there is a corresponding conjugate eigenvalue as
well. For pairs of complex conjugated eigenvalues
do not converge. However the eigenvalues of this submatrix will
converge. This submatrix can be identified and properly handled. A real
matrix may have real and complex eigenvalues. If there is a complex
eigenvalues, than there is a corresponding conjugate eigenvalue as
well. For pairs of complex conjugated eigenvalues  is at least
is at least  . Hence the sequence
. Hence the sequence  will show this phenomenon .
will show this phenomenon .
The  -decomposition is very expensive. Its cost is
-decomposition is very expensive. Its cost is  flops for general
flops for general  matrices. If
matrices. If  has upper Hessenberg form, the cost of
has upper Hessenberg form, the cost of  -decomposition is
-decomposition is  flops.
flops.
Definition 12.35 The matrix  has upper Hessenberg form, if
has upper Hessenberg form, if
The following theorem guarantees that if  has upper Hessenberg form, then every
has upper Hessenberg form, then every  of the
of the  -method has also upper Hessenberg form.
-method has also upper Hessenberg form.
Theorem 12.36 If  has upper Hessenberg form and
has upper Hessenberg form and  , then
, then  has also upper Hessenberg form.
has also upper Hessenberg form.
We can transform a matrix  to a similar matrix of upper Hessenberg form in many ways. One of the cheapest ways, that costs about
to a similar matrix of upper Hessenberg form in many ways. One of the cheapest ways, that costs about  flops, is based on the Gauss elimination method. Considering the
advantages of the upper Hessenberg form the efficient implementation of
the
flops, is based on the Gauss elimination method. Considering the
advantages of the upper Hessenberg form the efficient implementation of
the  -method requires first the similarity transformation of
-method requires first the similarity transformation of  to upper Hessenberg form.
to upper Hessenberg form.
The convergence of the  -method, similarly to the power method, depends on the quotients
-method, similarly to the power method, depends on the quotients  . The eigenvalues of the shifted matrix
. The eigenvalues of the shifted matrix  are
are  . The corresponding eigenvalue ratios are
. The corresponding eigenvalue ratios are  . A proper selection of
. A proper selection of  can fasten the convergence.
can fasten the convergence.
The usual form of the  -method includes the transformation to upper Hessenberg form and the shifting.
-method includes the transformation to upper Hessenberg form and the shifting.
Shifted- 
-Method(
)
1(
is of upper Hessenberg form) 2
3
WHILEexit condition =false4DOcompute the-decomposition
5
6
7
RETURN
In practice the  -method is used in shifted form. There are various strategies to select
-method is used in shifted form. There are various strategies to select  . The most often used selection is given by
. The most often used selection is given by  .
.
The eigenvectors of  can also be determined by the
can also be determined by the  -method. For this we refer to the literature.
-method. For this we refer to the literature.
Exercises
12.3-1 Apply the power method to the matrix  with the initial vector
with the initial vector  . What is the result of the
. What is the result of the  th step?
th step?
12.3-2 Apply the power method, the inverse power method and the  -method to the matrix
-method to the matrix
12.3-3 Apply the shifted  -method to the matrix of the previous exercise with the choice
-method to the matrix of the previous exercise with the choice  (
( is fixed).
is fixed).
We have plenty of devices and tools that support efficient coding and implementation of numerical algorithms. One aim of such developments is to free the programmers from writing the programs of frequently occurring problems. This is usually done by writing safe, reliable and standardised routines that can be downloaded from (public) program libraries. We just mention the LINPACK, EISPACK, LAPACK, VISUAL NUMERICS (former IMSL) and NAG libraries. Another way of developments is to produce software that work as a programming language and makes the programming very easy. Such software systems are the MATLAB and the SciLab.
The main purpose of the BLAS (Basic Linear Algebra Subprograms) programs is the standardisation and efficient implementation the most frequent matrix-vector operations. Although the BLAS routines were published in FORTRAN they can be accessed in optimised machine code form as well. The BLAS routines have three levels:
- BLAS 1 (1979),
- BLAS 2 (1988),
- BLAS 3 (1989).
These levels corresponds to the computation cost of the implemented matrix operations. The BLAS routines are considered as the best implementations of the given matrix operations. The selection of the levels and individual BLAS routines strongly influence the efficiency of the program. A sparse version of BLAS also exists.
We note that the BLAS 3 routines were developed mainly for block parallel algorithms. The standard linear algebra packages LINPACK, EISPACK and LAPACK are built from BLAS routines. The parallel versions can be found in the SCALAPACK package. These programs can be found in the public NETLIB library:
BLAS 1 routines.
Let  ,
,  . The BLAS 1 routines are the programs of the most important vector operations (
. The BLAS 1 routines are the programs of the most important vector operations ( ,
,  ,
,  ), the computation of
), the computation of  , the swapping of variables, rotations and the saxpy operation which is defined by
, the swapping of variables, rotations and the saxpy operation which is defined by

The word saxpy means that “scalar alpha  plus
plus  ”. The saxpy operation is implemented in the following way.
”. The saxpy operation is implemented in the following way.
Saxpy(
)
12
FORto
3
DO4
RETURN
The saxpy is a software driven operation. The cost of BLAS 1 routines is  flops.
flops.
BLAS 2 routines.
The matrix-vector operations of BLAS 2 requires  flops. These operations are
flops. These operations are  ,
,  ,
,  ,
,  ,
,  and their variants. Certain operations work only with triangular
matrices. We analyse two operations in detail. The “outer or dyadic
product” update
and their variants. Certain operations work only with triangular
matrices. We analyse two operations in detail. The “outer or dyadic
product” update

can be implemented in two ways.
The rowwise or “  ” variant:
” variant:
Outer-Product-Update-Version”ij” (
)
12
FOR
TO3
DO4
RETURN
The notation “:” denotes all allowed indices. In our case this means the indices  . Thus
. Thus  denotes the
denotes the  row of matrix
row of matrix  .
.
The columnwise or “  ” variant :
” variant :
Outer-Product-Update-Version“ji” (
)
12
FOR
TO3
DO4
RETURN
Here  denotes the
denotes the  column of matrix
column of matrix  . Observe that both variants are based on the saxpy operation.
. Observe that both variants are based on the saxpy operation.
The gaxpy operation is defined by

The word gaxpy means that “general 
 plus
plus  ”. The gaxpy operation is also software driven and implemented in the following way:
”. The gaxpy operation is also software driven and implemented in the following way:
Gaxpy(
)
12
3
FOR
TO4
DO5
RETURN
Observe that the computation is done columnwise and the gaxpy operation is essentially a generalised saxpy.
BLAS 3 routines.
These routines are the implementations of  matrix-matrix and matrix-vector operations such as the operations
matrix-matrix and matrix-vector operations such as the operations  ,
,  ,
,  (
( is upper triangular) and their variants. BLAS 3 operations can be
implemented in several forms. For example, the matrix product
is upper triangular) and their variants. BLAS 3 operations can be
implemented in several forms. For example, the matrix product  can be implemented at least in three ways. Let
can be implemented at least in three ways. Let  ,
,  .
.
Matrix-Product-Dot-Version(
)
12
3
4
5
FOR
TO6
DOFOR
TO7
DOFOR
TO8
DO9
RETURN
This algorithm computes  as the dot (inner) product of the
as the dot (inner) product of the  row of
row of  and the
and the  column of
column of  . This corresponds to the original definition of matrix products.
. This corresponds to the original definition of matrix products.
Now let  and
and  be partitioned columnwise as follows
be partitioned columnwise as follows
Then we can write  as the linear combination of the columns of
as the linear combination of the columns of  , that is
, that is

Hence the product can be implemented with saxpy operations.
Matrix-Product-Gaxpy-Variant(
)
12
3
4
5
FOR
TO6
DOFOR
TO7
DOFOR
TO8
DO9
RETURN
The following equivalent form of the “  ”-algorithm shows that it is indeed a gaxpy based process.
”-algorithm shows that it is indeed a gaxpy based process.
Matrix-Product-with-Gaxpy-Call(
)
12
3
4
FOR
TO5
DO6
RETURN
Consider now the partitions  (
( ) and
) and
Then  .
.
Matrix-Product-Outer-Product-Variant(
)
12
3
4
5
FOR
TO6
DOFOR
TO7
DOFOR
TO8
DO9
RETURN
The inner loop realizes a saxpy operation: it gives the multiple of  to the
to the  column of matrix
column of matrix  .
.
These are those programming tools that help easy programming in concise (possibly mathematical) form within an integrated program development system. Such systems were developed primarily for solving mathematical problems. By now they have been extended so that they can be applied in many other fields. For example, Nokia uses MATLAB in the testing and quality control of mobile phones. We give a short review on MATLAB in the next section. We also mention the widely used MAPLE, DERIVE and MATEMATICA systems.
The MATLAB system.
The MATLAB software was named after the expression MATrix LABoratory. The name indicates that the matrix operations are very easy to make. The initial versions of MATLAB had only one data type: the complex matrix. In the later versions high dimension arrays, cells, records and objects also appeared. The MATLAB can be learned quite easily and even a beginner can write programs for relatively complicated problems.
The coding of matrix operations is similar to their standard mathematical form. For example if  and
and  are two matrices of the same size, then their sum is given by the command
are two matrices of the same size, then their sum is given by the command  . As a programming language the MATLAB contains only four control structures known from other programming languages:
. As a programming language the MATLAB contains only four control structures known from other programming languages:
– the simple statement  expression, - the if statement of the form
expression, - the if statement of the form
 expression, commands {
expression, commands {  commands}
commands}  ,
,
– the for loop of the form
 the values of the loop variable, commands
the values of the loop variable, commands 
– the while loop of the form
 expression, commands
expression, commands  .
.
The MATLAB has an extremely large number of built in functions that help efficient programming. We mention the following ones as a sample.
–  selects the maximum element in every column of
selects the maximum element in every column of  ,
,
–  returns the approximate eigenvalues and eigenvectors of
returns the approximate eigenvalues and eigenvectors of  ,
,
– The command  returns the numerical solution of the linear system
returns the numerical solution of the linear system  .
.
The entrywise operations and partitioning of matrices can be done very efficiently in MATLAB. For example, the statement

exchange the second and third rows of  while it takes the reciprocal of each element.
while it takes the reciprocal of each element.
The above examples only illustrate the possibilities and easy programming of MATLAB. These examples require much more programming effort in other languages, say e.g. in PASCAL. The built in functions of MATLAB can be easily supplemented by other programs.
The higher number versions of MATLAB include more and more functions and special libraries (tool boxes) to solve special problems such as optimisation, statistics and so on.
There is a built in automatic technique to store and handle sparse matrices that makes the MATLAB competitive in solving large computational problems. The recent versions of MATLAB offer very rich graphic capabilities as well. There is an extra interval arithmetic package that can be downloaded from the WEB site

There is a possibility to build certain C and FORTRAN programs into MATLAB. Finally we mention that the system has an extremely well written help system.
PROBLEMS |
12-1 Without overflow
Write a MATLAB program that computes the norm  without overflow
in all cases when the result does not make overflow. It is also
required that the error of the final result can not be greater than
that of the original formula.
without overflow
in all cases when the result does not make overflow. It is also
required that the error of the final result can not be greater than
that of the original formula.
12-2 Estimate
Equation  has the solution
has the solution  . The perturbed equation
. The perturbed equation  has the solutions
has the solutions  . Give an estimate for the perturbation
. Give an estimate for the perturbation  .
.
12-3 Double word length
Consider an arithmetic system that has double word length such that every number represented with  digits are stored in two
digits are stored in two  digit word. Assume that the computer can only add numbers with
digit word. Assume that the computer can only add numbers with  digits. Furthermore assume that the machine can recognise overflow.
digits. Furthermore assume that the machine can recognise overflow.
(i) Find an algorithm that add two positive numbers of  digit length.
digit length.
(ii) If the representation of numbers requires the sign digit for all numbers, then modify algorithm (i) so that it can add negative and positive numbers both of the same sign. We can assume that the sum does not overflow.
12-4 Auchmuty theorem
Write a MATLAB program for the Auchmuty error estimate (see Theorem 12.22) and perform the following numerical testing.
(i) Solve the linear systems  , where
, where  is a given matrix,
is a given matrix,  ,
,  (
( ) are random vectors such that
) are random vectors such that  . Compare the true errors
. Compare the true errors  (
( ), and the estimated errors
), and the estimated errors  , where
, where  is the approximate solution of
is the approximate solution of  . What is the minimum, maximum and average of numbers
. What is the minimum, maximum and average of numbers  ? Use graphic for the presentation of the results. Suggested values are
? Use graphic for the presentation of the results. Suggested values are  ,
,  and
and  .
.
(ii) Analyse the effect of condition number and size.
(iii) Repeat problems (i) and (ii) using LINPACK and BLAS.
12-5 Hilbert matrix
Consider the linear system  , where
, where  and
and  is the fourth order Hilbert matrix, that is
is the fourth order Hilbert matrix, that is  .
.  is ill-conditioned. The inverse of
is ill-conditioned. The inverse of  is approximated by
is approximated by
Thus an  approximation of the true solution
approximation of the true solution  is given by
is given by  . Although the true solution is also integer
. Although the true solution is also integer  is not an acceptable approximation. Apply the iterative refinement with
is not an acceptable approximation. Apply the iterative refinement with  instead of
instead of  to find an acceptable integer solution.
to find an acceptable integer solution.
12-6 Consistent norm
Let  be a consistent norm and consider the linear system
be a consistent norm and consider the linear system 
(i) Prove that if  is singular, then
is singular, then  .
.
(ii) Show that for the 2-norm equality holds in (i), if  and
and  .
.
(iii) Using the result of (i) give a lower bound to  , if
, if
12-7 Cholesky-method
Use the Cholesky-method to solve the linear system  , where
, where
Also give the exact Cholesky-decomposition  and the true solution of
and the true solution of  . The approximate Cholesky-factor
. The approximate Cholesky-factor  satisfies the relation
satisfies the relation  . It can proved that in a floating point arithmetic with
. It can proved that in a floating point arithmetic with  -digit mantissa and base
-digit mantissa and base  the entries of
the entries of  satisfy the inequality
satisfy the inequality  , where
, where
Give a bound for the relative error of the approximate solution  , if
, if  and
and  (IBM3033).
(IBM3033).
12-8 Bauer-Fike theorem
Let
(i) Analyze the perturbation of the eigenvalues for  .
.
(ii) Compare the estimate of Bauer-Fike theorem to the matrix  .
.
12-9 Eigenvalues
Using the MATLAB eig routine compute the eigenvalues of  for various (random) matrices
for various (random) matrices  and order
and order  . Also compute the eigenvalues of the perturbed matrices
. Also compute the eigenvalues of the perturbed matrices  , where
, where  are random matrices with entries from the interval
are random matrices with entries from the interval  (
( ). What is the maximum perturbation of the eigenvalues? How precise is the Bauer-Fike estimate? Suggested values are
). What is the maximum perturbation of the eigenvalues? How precise is the Bauer-Fike estimate? Suggested values are  and
and  . How do the results depend on the condition number and the order
. How do the results depend on the condition number and the order  ? Display the maximum perturbations and the Bauer-Fike estimates graphically.
? Display the maximum perturbations and the Bauer-Fike estimates graphically.
CHAPTER NOTES |
The a posteriori error estimates of linear algebraic systems are not completely reliable. Demmel, Diament és Malajovich [61] showed that for the  number estimators there are always cases when the estimate is
unreliable (the error of the estimate exceeds a given order). The first
appearance of the iterative improvement is due to Fox, Goodwin, Turing
and Wilkinson (1946). The experiences show that the decrease of the
residual error is not monotone.
number estimators there are always cases when the estimate is
unreliable (the error of the estimate exceeds a given order). The first
appearance of the iterative improvement is due to Fox, Goodwin, Turing
and Wilkinson (1946). The experiences show that the decrease of the
residual error is not monotone.
Young [279], Hageman and Young [103] give an excellent survey of the theory and application of iterative methods. Barett, Berry et al. [23] give a software oriented survey of the subject. Frommer [78] concentrates on the parallel computations.
The convergence of the  -method is a delicate matter. It is analyzed in great depth and much better results than Theorem 12.34 exist in the literature. There are
-method is a delicate matter. It is analyzed in great depth and much better results than Theorem 12.34 exist in the literature. There are  -like methods that involve double shifting. Batterson [24] showed that there exists a
-like methods that involve double shifting. Batterson [24] showed that there exists a  Hessenberg matrix with complex eigenvalues such that convergence cannot be achieved even with multiple shifting.
Hessenberg matrix with complex eigenvalues such that convergence cannot be achieved even with multiple shifting.
Several other methods are known for solving the eigenvalue problems (see, e.g. [269], [273]). The  -method is one of the best known ones. It is very effective on positive definite Hermitian matrices. The
-method is one of the best known ones. It is very effective on positive definite Hermitian matrices. The  -method computes the Cholesky-decomposition
-method computes the Cholesky-decomposition  and sets
and sets  .
.
[1] Difference Equations and Inequalities. Marcel Dekker, New York. 2000.
[3] PRIMES is in P. http://www.cse.iitk.ac.in/users/manindra/. 2002.
[4] Some properties of fix-free codes, In Proceedings of the 1st International Seminarium on Coding Theory and Combinatorics. 1996 (Thahkadzor, Armenia). 20–23.
[5] The Theory of Parsing, Translation and Compiling Vol. I.. Prentice-Hall. 1972.
[6] The Theory of Parsing, Translation and Compiling Vol. II.. Prentice-Hall. 1973.
[7] Compilers, Principles, Techniques and Tools. Addison-Wesley. 1986.
[8] The Shortest Vector Problem in  is NP-hard for Randomized Reduction, In Proceedings of the 30th Annual ACM Symposium on Theory of Computing. 1998. 10–18.
is NP-hard for Randomized Reduction, In Proceedings of the 30th Annual ACM Symposium on Theory of Computing. 1998. 10–18.
[9] Sorting in  parallel steps. Combinatorica. 1983. 1–19.
parallel steps. Combinatorica. 1983. 1–19.
[10] Elements of Computer Algebra with Applications. John Wiley & Sons. 1989.
[11] Dynamic TCP acknowledgement, penalizing long delays, In Proceedings of the 25th ACM-SIAM Symposium on Discrete Algorithms. 2003. 47–55.
[12] Graph isomorphism is in SPP, In Proceedings of the 43rd IEEE Symposium on Foundations of Computer Science. IEEE Computer Society Press. 2002. 743–750.
[13] On-line load balancing with applications to machine scheduling and virtual circuit routing. Journal of the ACM. 1997. 486–504.
[14] Theoretische Informatik. Pearson Studium. 2002.
[15] Mathematical Methods of Game and Economic Theory. North-Holland. 1979.
[16] Throughput-competitive online routing, In Proceedings of the 34th Annual Symposium on Foundations of Computer Science. 1993. 32–40.
[17] On-line load balancing, Lecture Notes in Computer Science. Springer-Verlag. 1998. 178–195.
[18] Trading group theory for randomness, In Proceedings of the 17th ACM Symposium on Theory of Computing. ACM Press. 1985. 421–429.
[19] Arthur-Merlin games: A randomized proof system, and a hierarchy of complexity classes. Journal of Computer and Systems Sciences. 1988. 254–276.
[20] Shelf algorithms for two dimensional packing problems. SIAM Journal on Computing. 1983. 508–525.
[21] Universal data compression based on the Burrows-Wheeler transform: theory and practice. IEEE Transactions on Computers. 2000. 1043–1053–953.
[23] Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods. SIAM. 1994.
[24] Convergence of the shifted QR algorithm on  normal matrices. Numerische Mathematik. 1990. 341–352.
normal matrices. Numerische Mathematik. 1990. 341–352.
[25] Modeling for text compression. Communications of the ACM. 1989. 557–591.
[26] Text Compression. Prentice Hall. 1990.
[27] The asymptotic number of labeled graphs with given degree sequences. Combinatorial Theory Series A. 1978. 296–307.
[28] One-way functions in worst-case cryptography: Algebraic and security properties are on the house. SIGACT News. 1999. 25–40.
[29] Twenty years of attacks on the RSA cryptosystem. Notices of the AMS. 1999. 203–213.
[30] Restrictive acceptance suffices for equivalence problems. London Mathematical Society Journal of Computation and Mathematics. 2000. 86–95.
[32] Theory of Computation - Formal Langauges, Automata, and Complexity. The Benjamin/Cummings Publishing Company. 1989.
[34] An Improved Deterministic Local Search Algorithm for 3-SAT. Theoretical Computer Science. 2004. 303–313.
[35] Ein Algorithmus zum Auffinden der Basiselemente des Restklassenringes nach einem nulldimensionalen Polynomidealitle. PhD dissertation, Leopold-Franzens-Universität, Innsbruc. 1965.
[36] A block-sorting lossless data compression algorithm. Research Report 124, http://gatekeeper.dec.com/pub/DEC/SRC/research-reports/abstracts/src-rr-124.html. 1994.
[37] The Calgary/Canterbury Text Compression. ftp://ftp.cpsc.ucalgary.ca/pub/projects/text.compression.corpus. 2004.
[38] The Canterbury Corpus. http://corpus.canterbury.ac.nz. 2004.
[39] Randomness conductors and constant-degree lossless expanders, In Proceedings of the 34th ACM Symposium on Theory of Computing. IEEE Computer Society. 2001. 443–452.
[40] Theory of Finite Automata. Prentice Hall, Englewood Cliffs, New Jersey. 1989.
[41] Universal Classes of Hash Functions. KJournal of Computer and System Sciences. 1979. 143–154.
[43] Bounds for list schedules on uniform processors. SIAM Journal on Computing. 1980. 91–103.
[44] Resources for Computer Algebra. Computers in Physics. 1984. 308–315.
[45] New results on the server problem. SIAM Journal on Discrete Mathematics. 1991. 172–181.
[46] An optimal algorithm for  -servers on trees. SIAM Journal on Computing. 1991. 144–148.
-servers on trees. SIAM Journal on Computing. 1991. 144–148.
[47] The server problem and on-line games, DIMACS Series in Discrete Mathematics and Theoretical Computer Science. American Mathematical Society. 1992. 11–64.
[48] Computer and Job Shop Scheduling. John Wiley & Sons. 1976.
[49] Computer Algebra for Industry: Problem Solving in Practice. John Wiley & Sons. 1993.
[50] Computer Algebra for Industry 2, Problem Solving in Practice. John Wiley & Sons. 1995.
[51] The Complexity of Theorem Proving Procedures, In Proceedings of the 3th Annual ACM Symposium on Theory of Computing. ACM Press. 1971. 151–158.
[52] Engineering a Compiler. Morgan Kaufman Publisher. 2004.
[53] Small solutions to polynomial equations, and low exponent RSA vulnerabilities. Journal of Cryptology. 1997. 233–260.
[54] Introduction to Algorithms (3rd edition, second corrected printing). The MIT Press/McGraw-Hill. 2010.
[55] Elements of Information Theory. John Wiley & Sons. 1991.
[56] On-line packing and covering problems, Lecture Notes in Computer Science. Springer-Verlag. 1998. 147–177.
[57] Shelf algorithms for on-line strip packing. Information Processing Letters. 1997. 171–175.
[58] Coding Theorems for Discrete Memoryless Systems. Akadémiai Kiadó. 1981.
[59] A deterministic  algorithm for
algorithm for  -SAT based on local search. Theoretical Computer Science. 2002. 69–83.
-SAT based on local search. Theoretical Computer Science. 2002. 69–83.
[60] Computer Algebra: Systems and Algorithms for Algebraic Computation. Academic Press. 2000.
[61] On the complexity of computing error bounds. Foundations of Computational Mathematics. 2001. 101–125.
[62] Lower bound for the redundancy of self-correcting arrangements of unreliable functional elements. Problems of Information Transmission (translated from Russian). 1977. 59–65.
[63] Upper bound for the redundancy of self-correcting arrangements of unreliable elements. Problems of Information Transmission (translated from Russian). 1977. 201–208.
[64] On-line analysis of the TCP acknowledgement delay problem. Journal of the ACM. 2001. 243–273.
[65] Better online algorithms for scheduling with machine cost. SIAM Journal on Computing. 2004. 1035–1051.
[66] New upper and lower bounds for online scheduling with machine cost. Discrete Optimization. 2010. 125–135.
[67] Random Trees. SpringerWienNewYork. 2009.
[68] Problem Solving in Automata, Languages, and Complexity. John Wiley & Sons. 2001.
[69] An Introduction to Difference Equations. Springer-Verlag. 1999 (2nd edition).
[70] Universal lossless source coding with the Burrows-Wheeler transform. IEEE Transactions on Information Theory. 2002. 1061–1081.
[71] Gap-definable counting classes. Journal of Computer and System Sciences. 1994. 116–148.
[72] Competitive  -server algorithms. Journal of Computer and System Sciences. 1994. 410–428.
-server algorithms. Journal of Computer and System Sciences. 1994. 410–428.
[73] Online Algorithms. The State of Art. Springer-Verlag. 1998.
[74] Crafting a Compiler. The Benjamin/Cummings Publishing Company. 1988.
[75] Analytic Combinatorics. Addison-Wesley. 2009.
[76] On-line scheduling revisited. Journal of Scheduling. 2000. 343–353.
[77] Introduction to the Theory of Games: Concepts, Methods and Applications. Kluwer Academic Publishers. 1999.
[78] Lösung linearer Gleichungssysteme auf Parallelrechnern. Vieweg Verlag. 1990.
[79] Diophantine Equations and Power Integral Bases: New Computational Methods. Birkhäuser Bostoni. 2002.
[80] Low-density Parity-check Codes. The MIT Press. 1963.
[81] Computers and Intractability: A Guide to the Theory of NP-Completeness. W. H. Freeman. 1979.
[82] Modern Computer Algebra (first edition). Cambridge University Press. 1993.
[83] Modern Computer Algebra (second edition). Cambridge University Press. 2003.
[84] Reliable cellular automata with self-organization. Journal of Statistical Physics. 2001. 45–267, See also www.arXiv.org/abs/math.PR/0003117 and The Proceedings of the 1997 Symposium on the Theory of Computing.
[85] Lower bounds for the complexity of reliable Boolean circuits with noisy gates. IEEE Transactions on Information Theory. 1994. 579–583.
[86] A simple three-dimensional real-time reliable cellular array. Journal of Computer and System Sciences. 1988. 125–147.
[87] Algebraic Theory of Automata. Akadémiai Kiadó, Budapest. 1972.
[88] Algorithms for Computer Algebra. Kluwer Academic Publishers. 1992.
[89] Deterministic Generalized Automata. Theoretical Computer Science. 1999. 191–208.
[90] Randomness, interactive proofs, and zero-knowledge - A survey, In R. Herken The Universal Turing Machine: A Half-Century Survey. Oxford University Press. 1988. 377–405.
[91] Proofs that yield nothing but their validity or all languages in NP. Journal of the ACM. 1991. 691–729.
[92] Foundations of Cryptography. Cambridge University Press. 2001.
[93] Interactive proof systems, In J. Hartmanis (Ed.) Computational Complexity Theory, AMS Short Course Lecture Notes: Introductory Survey Lectures. Proceedings of Symposia in Applied Mathematics. American Mathematical Society. 1989. 108–128.
[94] The knowledge complexity of interactive proof systems. SIAM Journal on Computing. 1989. 186–208.
[95] Private coins versus public coins in interactive proof systems, In S. Micali (Ed.), Randomness and Computation, Advances in Computing Research. JAI Press. 1989. 73–90, A preliminary version appeared in Proc. 18th Ann. ACM Symp. on Theory of Computing, 1986.
[96] Computer Algebra Systems, In A. Ralston, E. D. Reilly, D. Hemmendinger (Eds.) Encyclopedia of Computer Science. Nature Publishing Group. 4th edition, 2000. 287–301.
[97] Bounds for certain multiprocessor anomalies. The Bell System Technical Journal. 1966. 1563–1581.
[98] Concrete Mathematics. Addison-Wesley. 1994 (2nd edition).
[99] Mathematics for the Analysis of Algorithms. Birkhäuser. 1990 (3rd edition).
[100] Compiler Construction for Digital Computers. John Wiley & Sons. 1971.
[101] Symbolic Computation: Applications to Scientific Computing, Frontiers in Applied Mathematics, Vol. 5. SIAM. 1989.
[102] Modern Compiler Design. John Wiley & Sons. 2000.
[103] Applied Iterative Methods. Academic Press. 1981.
[104] Mathematics of Information and Coding. American Mathematical Society. 2002.
[105] Nonlinear and Dynamic Programming. Addison-Wesley. 1964.
[106] Introduction to Information Theory and Data Compression. Chapman & Hall. 2003 (2nd edition).
[107] A Guide to Computer Algebra Systems. John Wiley & Sons. 1991.
[108] Introduction to Formal Language Theory. Addison-Wesley. 1978.
[109] Solving simultaneous modular equations of low degree. SIAM Journal on Computing. 1988. 336–341, Special issue on cryptography.
[110] Future Directions for Research in Symbolic Computation, SIAM Reports on Issues in the Mathematical Sciences. SIAM. 1990.
[111] Enforcing and defying associativity, commutativity, totality, and strong noninvertibility for one-way functions in complexity theory, In M. Coppo, M. Coppo et al. (Eds.) ICTCS 2005, Lecture Notes in Computer Science. Springer Verlag. 2005. 265–279.
[112] The Complexity Theory Companion, EATCS Texts in Theoretical Computer Science. Springer-Verlag. 2002.
[113] If P NP then Some Strongly Noninvertible Functions are Invertible. Theoretical Computer Science. 2006. 54–62.
NP then Some Strongly Noninvertible Functions are Invertible. Theoretical Computer Science. 2006. 54–62.
[114] Creating strong, total, commutative, associative one-way functions from any one-way function in complexity theory. Journal of Computer and Systems Sciences. 1999. 648–659.
[115] Group-Theoretic Algorithms and Graph Isomorphism, Lecture Notes in Computer Science. Springer-Verlag. 1982.
[116] Tight lower bounds on the ambiguity in strong, total, associative, one-way functions. Journal of Computer and System Sciences. 2004. 657–674.
[117] Introduction to Automata Theory, Languages, and Computation. Addison-Wesley. 2006 (in German: Einführung in Automatentheorie, Formale Sprachen und Komplexitätstheorie, Pearson Studium, 2002). 3rd edition.
[118] Introduction to Automata Theory, Languages, and Computation. Addison-Wesley. 1979.
[119] A Method for the Construction of Minimum-Redundancy Codes. Proceedings of the IRE. (1952). 1098–1101.
[120] Abstract Algebra: An Introduction. Saunders College Publishersiadó. 1990.
[121] Compilers, Their Design and Construction using Pascal. John Wiley& Sons. 1985.
[122] Online strip packing with modifiable boxes. Operations Research Letters. 2001. 79–86.
[123] Online scheduling with general machine cost functions. Discrete Applied Mathematics. 2009. 2070–2077.
[124] On time lookahead algorithms for the online data acknowledgement problem, In Proceedings of MFCS 2007 32nd International Symposium on Mathematical Foundations of Computer Science, Lecture Notes in Computer Science. Springer-Verlag. 2007. 288–297.
[125] Scheduling with machine cost, In Proceedings of APPROX'99, Lecture Notes in Computer Science. 1999. 168–176.
[126] Performance bounds for simple bin packing algorithms. Annales Universitatis Scientiarum Budapestinensis de Rolando Eötvös Nominatae, Sectio Computarorica. 1984. 77–82.
[127] Informatikai algoritmusok 1 (Algorithms of Informatics, Vol. 1). ELTE Eötvös Kiadó. 2004. Elektronic version: ELTE Informatikai Kar, 2005.
[128] Informatikai algoritmusok 2 (Algorithms of Informatics, Vol. 2). ELTE Eötvös Kiadó. 2005.
[129] Algorithms of Informatics, Vol. 1. mondAt Kiadó. 2007. Elektronic version: AnTonCom, Budapest, 2010.
[130] Algorithms of Informatics, Vol. . mondAt Kiadó. 2007. Elektronic version: AnTonCom, Budapest, 2010.
[131] Improved Upper Bounds for 3-SAT, In J. Munro (Ed.) Proceedings of the Fifteenth Annual ACM-SIAM Symposium on Discrete Algorithms, pages 328–329. Society for Industrial and Applied Mathematics. 2004.
[132] Near-Optimal Bin Packing Algorithms. PhD thesis, MIT Department of Mathematics. 1973.
[133] Fast algorithms for bin packing. Journal of Computer and System Sciences. 1974. 272–314.
[134] Worst-case performance-bounds for simple one-dimensional bin packing algorithms. SIAM Journal on Computing. 1974. 299–325.
[135] A generalization of Brouwer's fixed point theorem. Duke Mathematical Journal. 1941. 457–459.
[136] The secure use of RSA. CryptoBytes. 1995. 7–13.
[137] The nonlinear complementarity problems with applications. I, II.. Journal of Optimization Theory and Applications. 1969. 87–98 and 167–181.
[138] Use of Symbolic Computation in Probability and Statistics, In Z. Karian (Ed.) Symbolic Computation in Undergraduate Mathematics Education. Mathematical Association of America, Number 24 in Notes of Mathematical Association of America. 1992.
[139] Dynamic TCP acknowledgement and other stories about  , In Proceedings of the 31st Annual ACM Symposium on Theory of Computing. 2001. 502–509.
, In Proceedings of the 31st Annual ACM Symposium on Theory of Computing. 2001. 502–509.
[140] Reducibility Among Combinatorial Problems, In R. E. Miller, J. W. Thatcher Complexity of Computer Computations. Plenum Press. 1972. 85–103.
[141] Combinatorica cu aplicatii (Combinatorics with Applications). Presa Universitara Clujeana. 2003.
[142] Automata and Formal Languages. Prentice Hall. 1995.
[143] Generating random regular graphs, In Proceedings of the Thirty Fifth ACM Symposium on Theory of Computing. 2003. 213–222.
[144] Fundamental Algorithms, The Art of Computer Programming, Vol. 1.. Addison-Wesley. 1968 (3rd updated edition).
[145] Seminumerical Algorithms, The Art of Computer Programming, Vol. 2.. Addison-Wesley. 1969 (3rd corrected edition).
[146] Sorting and Searching, The Art of Computer Programming, Vol. 3.. Addison-Wesley. 1973 (3rd corrected edition).
[147] On the  -server conjecture. Journal of the ACM. 1995. 971–983.
-server conjecture. Journal of the ACM. 1995. 971–983.
[148] Computer Algebra: Impact and Perspectives. Nieuw Archief voor Wiskunde. 1999. 29–55.
[149] Automata and Computability. Springer-Verlag. 1995.
[150] Turing machines with few accepting computations and low sets for PP. Journal of Computer and System Sciences. 1992. 272–286.
[152] The Graph Isomorphism Problem: Its Structural Complexity. Birkhäuser. 1993.
[153] The performance of universal encoding. IEEE Transactions on Information Theory. 1981. 199–207.
[154] Contributions to the Theory of Games. II. Princeton University Press. 1953.
[155] Space efficient linear time computation of the Burrows and Wheeler transformation, In I. Althöfer, N. Cai, G. Dueck, L. Khachatrian, M. Pinsker, A. Sárközy, I. Wegener, Z. Zhang (Eds.): Numbers, Information and Complexity. Kluwer Academic Publishers. 2000. 375–383.
[156] Information storage in a memory assembled from unreliablecomponents. Problems of Information Transmission (translated from Russian). 1973. 254–264.
[157] A comparison of polynomial time reducibilities. Theoretical Computer Science. 1975. 103–124.
[158] An introduction to arithmetic coding. IBM Journal of Research and Development. 1984. 135–149.
[160] The Development of the Number Field Sieve, Lecture Notes in Mathematics. Springer-Verlag. 1993.
[162] On-line network routing, Lecture Notes in Computer Science. Springer-Verlag. 1998. 242–267.
[163] Introduction to Finite Fields and Their Applications. Cambridge University Press. 1986.
[164] An Introduction to Formal Languages and Automata. Jones and Barlett Publishers. 2001.
[165] An Introduction to Formal Language and Automata. Jones and Bartlett Publishers, Inc.. 2006. 4th edition.
[166] Algebraic Combinatorics on Words. Cambridge University Press. 2002.
[168] Algoritmusok (Algorithms). Műszaki Könyvkiadó és Tankönyvkiadó, Budapest. 1978 and 1987.
[169] Compilers and interpreters, A. B. Tucker (ed.) Computer Science Handbook, pages 99/1–99/30. Chapman & Hall/CRC. 2004.
[171] Writing Compilers and Interpreters. Addison-Wesley. 1991.
[172] Competitive algorithms for server problems. Journal of Algorithms. 1990. 208–230.
[173] Two-person zero-sum games and quadratic programming. Journal of Mathematical Analysis and its Applications. 1964. 348–355.
[174] Mathematical Theory of Computation. McGraw-Hill Book Co.. 1974.
[175] Nonlinear Programming Theory and Methods. Akadémiai Kiadó. 1975.
[176] A note on the graph isomorphism counting problem. Information Processing Letters. 1979. 131–132.
[177] Automata and Languages: Theory and Applications. Springer-Verlag. 2000.
[178] The equivalence problem for regular expressions with squaring requires exponential space, In Proceedings of the 13th IEEE Symposium on Switching and Automata Theory. 1972. 129–129.
[179] Complexity of Lattice Problems: A Cryptographic Perspective, The Kluwer International Series in Engineering and Computer Science. Kluwer Academic Publishers. 2002.
[180] Difference Equations. Theory and Applications. Van Nostrand Reinhold. 1990.
[181] Mathematics for Computer Algebra. Springer. 1992.
[182] Riemann's Hypothesis and Tests for Primality. Journal of Computer and Systems Sciences. 1976. 300–317.
[183] Equilibrium points of finite games. SIAM Journal of Applied Mathematicsiadó. 1976. 397–402.
[184] Algorithmic Algebra. Springer. 1993.
[185] An Introduction to Formal Language Theory. Springer-Verlag. 1988.
 steps.
steps. [187] Protocol failures in cryptosystems, In G. Simmons Contemporary Cryptology: The Science of Information Integrity. IEEE Computer Society Press. 1992. 541–558.
[188] Randomized Algorithms. Cambridge University Press. 1995.
[189] Advanced Compiler Design and Implementation. Morgan Kaufman Publisher. 1997.
[190] Noncooperative games. Annals of Mathematics. 1951. 286–295.
[192] Probabilistic logics and the synthesis of reliable organisms from unreliable components, In C. Shannon, P. J. McCarthy (Eds.) Automata Studiess. Princeton University Press. 1956. 43–98.
[193] Theory of Games and Economical Behaviour. Princeton University Press. 1947 (2nd edition).
[194] Note on noncooperative games. Pacific Journal of Mathematics. 1955. 807–815.
[195] Applications of Symbolic Mathematics to Mathematics. Kluwer Academic Publishers. 1985.
[196] Expectation and Stability of Oligopoly Models. Springer. 1976.
[197] The Theory of Oligopoly with Multi-Product Firms. Springer. 1999 (2nd edition).
[198] Computational Complexity. Addison-Wesley. 1994.
[199] Source Coding Algorithms for Fast Data Compression. Stanford University. 1976.
[200] An improved exponential-time algorithm for  -SAT, In Proceedings of the 39th IEEE Symposium on Foundations of Computer Science, pages 628–637. IEEE Computer Society Press. 1998.
-SAT, In Proceedings of the 39th IEEE Symposium on Foundations of Computer Science, pages 628–637. IEEE Computer Society Press. 1998.
[201] Computer Algebra. Scientific American. 1981. 102–113.
[203] On a lower bound for the redundancy of reliable networks with noisy gates. IEEE Transactions on Information Theory. 1991. 639–643.
[204] Analysis of error correction by majority voting, In S. Micali (Ed.) Randomness in Computationitle. JAI Press. 1989. 171–198.
[206] The Art of Compiler Design, Theory and Practice. Prentice Hall. 1992.
[207] Theorems on factorization and primality testing. Proceedings of the Cambridge Philosophical Society. 1974. 521–528.
[208] An observation on associative one-way functions in complexity theory. Information Processing Letters. 1997. 239–244.
[209] Probabilistic Algorithms for Testing Primality. Journal of Number Theory. 1980. 128–138.
[210] Upward separation for FewP and related classes. Information Processing Letters. 1994. 175–180, (Corrigendum appears in the same journal,74(1-2):89, 2000).
[211] Reliable computation with noisy circuits and decision trees-a general  lower bound, In Proceedings of the 32-nd IEEE FOCS Symposium. 1991. 602–611.
lower bound, In Proceedings of the 32-nd IEEE FOCS Symposium. 1991. 602–611.
[212] Generalized Kraft inequality and arithmetic coding. IBM Journal of Research and Development. 1976. 198–203.
[213] Integration in Finite Terms. Columbia University Press. 1948.
[214] A Method for Obtaining Digital Signatures and Public-Key Cryptosystems. Communications of the ACM. 1978. 120–126.
[215] An iterative method of solving a game. Annals of Mathematics. 1951. 296–301.
[216] Existence and uniqueness of equilibrium points for concave  -person games. Econometrica. 1965. 520–534.
-person games. Econometrica. 1965. 520–534.
[217] Some Facets of Complexity Theory and Cryptography: A Five-Lecture Tutorial. ACM Computing Surveys. 2002. 504–549.
[218] A promise class at least as hard as the polynomial hierarchy. Journal of Computing and Information. 1995. 92–107.
[219] Complexity Theory and Cryptology. An Introduction to Cryptocomplexity, EATCS Texts in Theoretical Computer Sciencey. Springer-Verlag. 2005.
[220] Handbook of Formal Languages, Volumes I-III.. Springer-Verlag. 1997.
[221] Theory of Automata. Pergamon Press. 1969.
[222] Formal Languages. Academic Press. 1987 (2nd updated edition).
[223] Public-Key Cryptography, EATCS Monographs on Theoretical Computer Science, Vol. 23. Springer-Verlag. 1996 (2nd edition).
[224] Data Compression. Springer-Verlag. 2004 (3rd edition).
[225] Introduction to Data Compression. Morgan Kaufman Publisher. 2000 (2nd edition).
[226] A low and a high hierarchy within NP. Journal of Computer and System Sciences. 1983. 14–28.
[227] Graph isomorphism is in the low hierarchy. Journal of Computer and System Sciences. 1987. 312–323.
[228] A probabilistic algorithm for  -SAT based on limited local search and restart, In Proceedings of the 40th IEEE Symposium on Foundations of Computer Science. IEEE Computer Society Press. 1999. 410–414.
-SAT based on limited local search and restart, In Proceedings of the 40th IEEE Symposium on Foundations of Computer Science. IEEE Computer Society Press. 1999. 410–414.
[230] An Introduction to the Analysis of Algorithms. Addison-Wesley. 1996.
[231] Polynomial time enumeration reducibility. SIAM Journal on Computing. 1978. 440–457.
[232] TIP=PSPACE. Journal of the ACM. 1992. 869–877.
[234] The synthesis of two-terminal switching circuits. The Bell Systems Technical Journal. 1949. 59–98.
[235] Note on a computation method in the theory of games. Communications on Pure and Applied Mathematics. 1958. 587–593.
[236] Scheduling parallel machines online. SIAM Journal on Computing. 1995. 1313–1331.
[237] Finite Fields: Theory and Computation The Meeting Point of Number Theory, Computer Science, Coding Theory, and Cryptography. Kluwer Academic Publishers. 1999.
[238] Automata Theory. World Scientific Publishing Company. 1999.
[239] On-line scheduling, Lecture Notes in Computer Science. Springer-Verlag. 1998. 196–231.
[240] Theory of Formal Languages with Applications. World Scientific Publishing Company. 1999.
[242] Introduction to the Theory of Computation. PWS Publishing Company. 1997.
[244] Amortized efficiency of list update and paging rules. Communications of the ACM. 1985. 202–208.
[245] The Algorithmic Resolution of Diophantine Equations, In London Mathematical Society Student Text. Cambridge University Press. 1998.
[246] A fast Monte Carlo test for primality. SIAM Journal on Computing. 1977. 84–85.
[247] Linear-time encodable and decodable error-correcting codes, In Proceedings of the 27th ACM STOC Symposium. 1995. 387–397 (further IEEE Transactions on Information Theory 42(6): 1723–1732).
[248] Highly fault-tolerant parallel computation, In Proceedings of the 37th IEEE Foundations of Computer Science Symposium. 1996. 154–163.
[249] Cryptography: Theory and Practice. CRC Press. 2002 (2nd edition).
[250] The polynomial-time hierarchy. Theoretical Computer Science. 1977. 1–22.
[251] Finite Automata, Formal Logic, and Circuit Complexity. Birkhäuser. 1994.
[252] Languages and Machines. Addison-Wesley. 1997.
[254] Principles and Procedures of Numerical Analysis. Plenum Press. 1998.
[255] A lattice-theoretical fixpoint theorem and its application. Pacific Journal of Mathematics. 1955. 285–308.
[256] JPEG 2000 - Image Compression, Fundamentals, Standards and Practice. Society for Industrial and Applied Mathematics. 1983.
[257] Reliable information storage in memories designed from unreliable components. The Bell Systems Technical Journal. 1968. 2299–2337.
[258] Compiler Writing. McGraw-Hill Book Co.. 1985.
[259] On computable numbers, with an application to the Entscheidungsproblem. Proceedings of the London Mathematical Society, ser. 2. 1936.
[261] The relative complexity of checking and evaluating. Information Processing Letters. 1976. 20–23.
[262] On-line machine scheduling. Phd thesis, Eindhoven University of Technology. 1997.
[264] An improved lower bound for on-line bin packing algorithms. Information Processing Letters. 1992. 277–284.
[265] Lower and upper bounds for on-line bin packing and scheduling heuristics. PhD thesis, Erasmus University, Rotterdam. 1995.
[266] Computational Complexity. D. Reidel Publishing Company. 1986 (and Kluwer Academic Publishers, 2001).
[267] Compiler Construction. Springer-Verlag. 1984.
[268] The JPEG still picture compression standard. Communications of the ACM. 1991. 30–44.
[269] Bulge exchanges in algorithms of QR type. SIAM Journal on Matrix Analysis and Application. 1998. 1074–1096.
[270] Formal Language: A Practical Introduction. Franklin, Beedle & Associates, Inc.. 2008.
[271] Vorlesungen zur Komplexitätstheorie. B. G. Teubner Verlagsgesellschaft. 2000.
[272] Codes and Cryptography. Oxford University Press. 1988.
[273] Convergence of the LR, QR, and related algorithms. The Computer Journal. 1965. 77–84.
[274] The context-tree weighting method: basic properties. IEEE Transactions on Information Theory. 1995. 653–664.
[275] The context-tree weighting method: basic properties. IEEE Information Theory Society Newsletter. 1997. 1 and 20–27.
[276] Polynomial Algorithms in Computer Algebra. Springer-Verlag. 1990.
[277] Arithmetic coding for sequential data compression. Communications of the ACM. 1987. 520–540.
[278] New algorithms for bin packing. Journal of the ACM. 1980. 207–227.
[279] Iterative Solution of Large Linear Systems. Academic Press. 1971.
[280] On-line file caching. Algorithmica. 2002. 371–383.
[281] A universal algorithm for sequential data compression. IEEE Transactions on Information Theory. 1977. 337–343.
[282] Compression of individual sequences via variable-rate coding. IEEE Transactions on Information Theory. 1978. 530–536.
 -person games (numerical methods).
-person games (numerical methods).